Design and construction of a multi-sensor position monitoring system applied to key compon
- 格式:pdf
- 大小:1.74 MB
- 文档页数:7
architectural practicesArchitectural Practices: Creating Functional and Aesthetic SpacesIntroduction:Architectural practices play a crucial role in shaping the world we live in. From soaring skyscrapers to humble residential homes, architecture combines functionality with aesthetic appeal to create spaces that enhance our lives. In this article, we will take astep-by-step approach to understand the process and principles behind architectural practices.1. Conceptualizing the Design:The first step in any architectural practice is conceptualizing the design. Architects draw inspiration from various sources, including natural elements, cultural influences, and client requirements. They analyze the site's context, weather conditions, and social aspects to develop a design concept that addresses these factors. This conceptualization phase is crucial as it sets the foundation for the rest of the architectural process.2. Initial Design Development:Once the design concept is established, architects proceed to develop the initial design. This involves translating the concept into drawings and plans. Architects use a variety of tools and techniques, such as computer-aided design (CAD) software, to create detailed floor plans, elevations, sections, and three-dimensional models. These drawings help visualize the design and ensure that it meets functional requirements and regulations.3. Functional Analysis:Functionality is a core aspect of architectural practices. Architects analyze the spatial requirements of the building, considering factors such as circulation, ergonomics, and accessibility. They also study the programmatic needs, determining the relationships between different spaces and their functionalities. This functional analysis ensures that the design optimizes space usage and accommodates the intended activities.4. Material Selection and Sustainability:Sustainability has become a significant consideration in modern architectural practices. Architects carefully select materials that are environmentally friendly, energy-efficient, and long-lasting. They explore sustainable building techniques, such as green roofs, solar panels, and rainwater harvesting systems, to minimize the building's impact on the environment. By embracing sustainable practices, architects contribute to a more eco-friendly and sustainable future.5. Structural Design and Engineering:Architectural practices incorporate structural design and engineering principles to ensure the safety and stability of the building. Architects collaborate with structural engineers to design the structural system, considering factors such as load-bearing capacity, seismic resistance, and wind loads. They also account for materials' properties, such as their strength and durability, to create a solid and structurally sound building.6. Construction Documentation and Specifications:Architects prepare detailed construction documentation, includingplans, sections, and specifications, to guide builders during construction. These documents outline construction details, material specifications, and quality standards. Architects also collaborate with contractors and suppliers to address any queries or concerns during the construction process. Clear and comprehensive construction documentation ensures the design intent is maintained during construction.7. Project Management and Coordination:Architectural practices involve project management and coordination to ensure a successful outcome. Architects oversee the project's progress, ensuring that it adheres to the design intent and meets the client's expectations. They coordinate with various stakeholders, including builders, subcontractors, and suppliers, to ensure smooth execution. Effective project management ensures that the project stays on schedule, within budget, and meets all necessary standards.8. Interior Design and Finishes:Interior design is an essential aspect of architectural practices.Architects collaborate with interior designers to create cohesive interior spaces that complement the overall design. They select finishes, such as flooring, wall treatments, and lighting, that enhance the aesthetics of the space. Architects ensure that the interior design aligns with the functional requirements and design intent, creating a harmonious and pleasing environment.9. Post-Construction Evaluation:Once the building is completed, architects conductpost-construction evaluations to assess the performance of the design and identify any areas for improvement. They analyze factors such as energy efficiency, thermal comfort, and user satisfaction. Feedback from the occupants of the building helps architects refine their future designs and continuously improve their architectural practices.Conclusion:Architectural practices involve a step-by-step process that combines creativity, functionality, and sustainability to create inspiring spaces. From conceptualizing the design topost-construction evaluations, architects work diligently to bring their vision to life. By considering the site context, incorporating sustainable practices, and ensuring structural integrity, architects shape our built environment in a way that enhances our lives and fosters a sustainable future.。
第15卷第7期孟宝,等:镁锂合金微型热管电场辅助超塑挤压成形19and Superplastic Forming of Negative Angle Box-ShapedParts[D]. Harbin: Harbin Institute of Technology, 2017:3-14.[5] 李淼泉, 吴诗. LY12CZ铝合金在强电场中的超塑性变形[J]. 塑性工程学报, 1996, 3(3): 41-46.LI Miao-quan, WU Shi. Superlastic Deformation of LY12CZ Aluminum Alloy under an Electric Field[J].Journal of Plasticity Engineering, 1996, 3(3): 41-46. [6] 蔡春波, 高少伟, 高桂丽, 等. 脉冲电流对Al-Cu-Mn-Zr合金时效处理组织及性能的影响[J]. 金属热处理,2023, 48(4): 104-110.CAI Chun-bo, GAO Shao-wei, GAO Gui-li, et al. Effectof Pulse Current on Microstructure and Properties of Al-Cu-Mn-Zr Alloy after Aging Treatment[J]. Heat Treatment of Metals, 2023, 48(4): 104-110.[7] WANG Yao-li, WANG Guang-xin, ZHANG Ke-ke. Elec-tro-Superplastic Solid State Welding of 40Cr/QCr0.5[J].Materials, 2018, 11(7): 1153.[8] WANG Guo-feng, LI Xiao, LIU Si-yu, et al. ImprovedSuperplasticity and Microstructural Evolution of Ti2AlNbAlloy Sheet during Electrically Assisted Superplastic GasBulging[J]. The International Journal of Advanced Manufacturing Technology, 2018, 99(1): 773-787.[9] YOSHIDA H, SASAKI Y. Low Temperature and HighStrain Rate Superplastic Flow in Structural Ceramics In-duced by Strong Electric-Field[J]. Scripta Materialia, 2018, 146: 173-177.[10] 林赟, 唐国翌, 孙强, 等. Inconel690合金的电致塑性拉拔研究[J]. 热加工工艺, 2010, 39(24): 80-82.LIN Yun, TANG Guo-yi, SUN Qiang, et al. Investigationof Electro-Plastic Drawing on Inconel690 Alloy[J]. HotWorking Technology, 2010, 39(24): 80-82.[11] 刘建龙, 王效岗, 王皓悦. 微挤压模具设计[J]. 模具技术, 2016(5): 26-29.LIU Jian-long, WANG Xiao-gang, WANG Hao-yue. TheDesign of Micro Extrusion Die[J]. Die and Mould Tech-nology, 2016(5): 26-29.[12] 李细锋, 曹旭东, 王斌, 等. 钛合金电辅助塑性成形技术研究进展[J]. 航空制造技术, 2021, 64(17): 22-30.LI Xi-feng, CAO Xu-dong, WANG Bin, et al. ResearchProgress on Electrically-Assisted Plastic Forming Techn-ology of Titanium Alloy[J]. Aeronautical ManufacturingTechnology, 2021, 64(17): 22-30.[13] 蔡贇, 孙朝阳, 万李, 等. AZ80镁合金动态再结晶软化行为研究[J]. 金属学报, 2016, 52(9): 1123-1132.CAI Yun, SUN Zhao-yang, WAN Li, et al. Study on Dy-namic Recrystallization Softening Behavior of AZ80 Magnesium Alloy[J]. Acta Metallurgica Sinica, 2016, 52(9): 1123-1132.[14] ZHANG Cun-sheng, WANG Cui-xue, ZHANG Qing-you,et al. Influence of Extrusion Parameters on Microstruc-ture, Texture, and Second-Phase Particles in an Al-Mg-SiAlloy[J]. Journal of Materials Processing Technology, 2019, 270: 323-334. [15] XU Jie, ZHU Xiao-cheng, SHAN De-bin, et al. Effect ofGrain Size and Specimen Dimensions on Micro-Formingof High Purity Aluminum[J]. Materials Science and En-gineering: A, 2015, 646: 207-217.[16] CHEN Liang, ZHAO Guo-qun, YU Jun-quan, et al.Analysis and Porthole Die Design for a Multi-Hole Ex-trusion Process of a Hollow, Thin-Walled Aluminum Pro-file[J]. The International Journal of Advanced Manufac-turing Technology, 2014, 74(1): 383-392.[17] DEMIRCI H İ, EVLEN H. Effect of Extrusion Ratio onthe Wear Behaviour of Al-Si and Al-Mg Alloys[J]. Jour-nal of Alloys and Compounds, 2012, 510(1): 26-32. [18] GUAN Yan-jin, ZHANG Cun-sheng, ZHAO Guo-qun, etal. Design of a Multihole Porthole Die for AluminumTube Extrusion[J]. Materials and Manufacturing Proc-esses, 2012, 27(2): 147-153.[19] YU Zi-jian, XU Chao, MENG Jian, et al. Effects of Ex-trusion Ratio and Temperature on the Mechanical Proper-ties and Microstructure of As-Extruded Mg-Gd- Y-(Nd/Zn)-Zr Alloys[J]. Materials Science and Engineer-ing: A, 2019, 762: 138080.[20] 尹传龙, 齐凯华, 翟军, 等. 难以挤压成型的铝型材断面形状的局部优化[J]. 铝加工, 2022(5): 25-28.YIN Chuan-long, QI Kai-hua, ZHAI Jun, et al. AluminumProfile does not Apply to Local Optimization of Extru-sion[J]. Aluminium Fabrication, 2022(5): 25-28.[21] 王少华, 刘惠, 陈宗强, 等. 大型带筋薄壁圆管铝型材挤压成形数值模拟[J]. 锻压技术, 2022, 47(4): 181-189.WANG Shao-hua, LIU Hui, CHEN Zong-qiang, et al.Numerical Simulation on Extrusion Forming for LargeRibbed Thin-Walled Circular Tube Aluminum Profile[J].Forging & Stamping Technology, 2022, 47(4): 181-189. [22] PARK S Y, KIM W J. Difference in the Hot CompressiveBehavior and Processing Maps between the As-Cast andHomogenized Al-Zn-Mg-Cu (7075) Alloys[J]. Journal ofMaterials Science & Technology, 2016, 32(7): 660-670. [23] LIN Y C, XIA Yu-chi, CHEN Xiao-min, et al. Constitu-tive Descriptions for Hot Compressed 2124-T851 Aluminum Alloy over a Wide Range of Temperature andStrain Rate[J]. Computational Materials Science, 2010,50(1): 227-233.[24] LIU Yong-da, XU Jie, ZHANG Zheng-wu, et al. Mi-cro-Extrusion Process and Microstructure Evolution ofMiniature Heat Pipe in 6063 Aluminum Alloy[J]. The In-ternational Journal of Advanced Manufacturing Technol-ogy, 2022, 120(9/10): 6463-6480.[25] SELLARS C M, MCTEGART W J. On the Mechanism ofHot Deformation[J]. Acta Metallurgica, 1966, 14(9): 1136-1138.[26] DONATI L, TOMESANI L. The Effect of Die Design onthe Production and Seam Weld Quality of Extruded Alu-minum Profiles[J]. Journal of Materials Processing Technology, 2005, 164/165: 1025-1031.责任编辑:蒋红晨精 密 成 形 工 程第15卷 第7期20 JOURNAL OF NETSHAPE FORMING ENGINEERING2023年7月收稿日期:2023–05–29 Received :2023-05-29基金项目:山东省重点研发项目(2021CXGC010206)Fund :Key R&D Project of Shandong Province(2021CXGC010206) 作者简介:王硕(1997—),男,硕士生,主要研究方向为超声微锻造辅助增材制造。
Physicals GuideO ur broad range of physical testers2Our physical testers programERWEKA offers a broad range of physical testers.Tablet hardness testers We offer a wide range of tablet hardness testers - from the manual TBH 125 up to the fully automated testers EasyCheck and MultiCheck 6.Tapped density testers The SVM and its accompanying noisebox are the perfect soluti-on for tapped density testing.Disintegration testersTo analyse disintegration time, we offer manual and automated disintegration testers.Friability/Abrasion testers The TAR is our friability and abrasion tester.TBH 125 ..................................4TBH 325 ..................................4TBH 425 ..................................5EasyCheck ..............................6MultiCheck 6 (8)SVM .......................................12SVM Noisebox .. (13)ZT 220 Series ........................10ZT 320 Series ........................10ZT 720 Series (11)TAR (14)3Physicals GuideOur physical testers programVacuum leak testersThe VDT/S is our vacuum leak tester.Suppository testersWe offer a variety of suppository testers for testing of suppository disintegration, hardness, melting point and penetration testing.Granulate flow testers For testing of flow characteri-stics of granules and powders.ContactDo you have further questions? We are here to answer them for you.VDT/S (15)ST 35 .....................................17SBT 2 .....................................17SSP ........................................18PM 30 (18)GTL ........................................16GT & GTB (16)Contact (19)4Adjustment offorce increase(10 - 200 N/sec.)Collectioncontainer forbroken samplesSetting of testspeed (0.5 - 3.00mm/sec.)Adjustment offorce increase(10 - 200 N/sec.)LAN / USBinterface100%USP / EP / JPcompliantAdjustable breaksbetween thetest runs100%USP / EP / JPcompliantManual tablet hardness testersTBH 125TBH 325Dual-mode tester with robustdesign and basic functionsThe ERWEKA TBH 125 tablet hard-ness tester is the ERWEKA entry-level tablet hardness and combi-nation tester. The device is per-fectly suited for quick and manualtesting of up to 99 samples.Depending on the device model,automatic measurement can betaken for tablet hardness and thick-ness (optional), diameter (for roundtablets) or length (for oblongs). Theintegrated electronic measurementcell ensures highest accuracy forprecise measurement results.Due to the USB printer interfacethe results can be printed directly.Manual tester with productmemoryThe ERWEKA TBH 325, part ofmanual hardness and combinationtester product range, features anintegrated product memory for upto 50 products.The TBH 325 provides variousdocumentation and evaluationpossibilities. Depending on thedevice model, automatic mea-surement can be taken for tablethardness and thickness (optional),diameter (for round tablets) orlength (for oblongs) and weight(optional). Up to 100 tablets canbe precisely tested in one run.5Physicals GuideTBH 125 | TBH 325 | TBH 425Star feeder magazine100%USP / EP / JP compliant Easy to useAdjustment of force increase (10 - 200 N/sec.)Setting of test speed (0.5 - 3.00 mm/sec.)Semi-automated tablet hardness testerTBH 425The ERWEKA TBH 425 is a semi-automatic tablet hardness and com-bination tester for measuring of up to ten samples. The samples are automatically transported to the test station by a star-shaped rotary magazine. Depending on the device model, automatic measurement can be taken for tablet hardness and thickness (optional), diameter (for round tablets) or length (for oblongs). In combination with the optional balance the weight can also be determined.In addition, the rotary magazine enables full visual inspection of the test processes at all times. Up to 100 tablets can be precisely tested in one run and the acquired data can be documented and evalua-ted in a variety of ways. Therefore the TBH 425 can be connected to a printer via the USB printer interface or directly integrated into a computer network via the Ethernet LAN interface.Via a numeric keypad with alphanumeric subfunction the nominal hardness values in combination with three individual tolerances can be entered for up to 50 products and afterwards recalled for testing.The calibration of the TBH 425 is completely menu-driven and may be carried out statically by weight stones or dynamically by the elec-tronic ERWEKA AutoCal 2.0 System. In addition, the unit generates a calibration print-out outlining individual calibration data and further information (service date and time, serial number).100%USP / EP / JP compliantOblong SliderTest memory, Audit Trail Light & data exportStar feeder magazineEasyCheck Basic EasyCheckProMain application Round tablets Round tablets,evenly shaped oblongsMeasurement values4 parametersWeight, thickness,diameter, hardness5 parametersWeight, thickness, diameter/length, width, hardnessTouch displayOblong Slider ®Memory for up to 1million test results optional optional Audit Trail Light (21CFR Part 11 compliant)optional optional Data export in CSVand XML format optional optional Integrated weight measurementFully automated tablet hardness testerEasyCheckFully automatic hardness testing as easy as never beforeEasyCheck is the new entry-level tablet combination tester that testsfor up to 5 parameters. The compact system is 100 % compliantwith all common pharmacopoeias, and excels, above all, throughinnovative design features and a clear focus on essentials: Its inte-grated load cell automatically weighs samples, the Oblong Sliderautomatically brings evenly shaped oblongs into perfect alignmentand the intuitive touch display allows storage of up to 100 products/methods. EasyCheck offers a test memory for up to 1 million testresults directly on the unit – enabling results from earlier tests to bere-called whenever required.In addition, extensive integrated calibration functions and the AuditTrail Light feature (logging What, Who, When) ensures that you haveaccess to precise test results and extensive documentation of allworking steps - highest user convenience combined with powerfulfunctionality. Optionally the Easy Check offers a data export functionto CSV and XML format.EasyCheck is your entry-level device for easy, fully automatic andhighly precise testing for up to 5 parameters!67 Physicals GuideEasyCheck89Physicals Guide MultiCheck 6100%USP / EP / JP compliant Oblong Navigator ®Touch displayintegrated weight measurementMultiCheck 6 Basic MultiCheck 6 AllrounderMain application Round tabletsRound tablets, dragées, evenly shaped oblongs, odd-shapedoblongs Measurement values4 ValuesWeight, thickness, diameter,hardness5 ValuesWeight, thickness, diameter,width, hardnessTouch display Separation drum Capsule measurement Alignment threshold (fixed)Alignment threshold (electronic, adjustable)Slot for oblongs not requiredPositioning arm for oblongsOblong Navigator ®Fully automated tablet hardness testerMultiCheck 6The MultiCheck 6 offers ease of operation, maximum efficiency and enhanced operator convenience. This fully automatic combination tester is packed with innovative technology: The intuitive touch display with integrated software functionality, the capsule weight measurement system and the patented Oblong Navigator® are only some of the innovative new features. In addition, the new MultiCheck 6 provides an unsurpassed low noise level and cleanest operation in its class.Extensive integrated calibration functions and the Audit Trail Light feature (logging What, Who, When) ensures access to precise test results and extensive documentation of all working steps – highest user convenience combined with powerful functionality. Proven fea-tures have been retained: MultiCheck 6 can be equipped with the 12 batch magazine and test up to five tablet parameters, fully auto-mated and 100 % compliant with all pharmacopoeias around the world: A true all-rounder.10Individually drivenbasket racks100%USP / EP / JP compliant1 to 4test stations100%USP / EP / JP compliant 1 to 4test stationsDisintegration tester with run-time countAsynchronous disintegration testerZT 220 SeriesZT 320 SeriesThe disintegration testers of the ZT 220 series are available with 1, 2, 3 or 4 simultaneously motor dri-ven USP/EP/JP compliant test stations with basket rack assemblies. The standard versions of these units incorporate a high-quality integrated flow- through heating system, a moulded one-piece PET water bath (no leaking / breaking, easy to clean) and a water bath cover.The unit is easily operated: Set test run parameters such as run-time and water bath temperature are entered via a membrane keypad with symbol keys and the actual values are then shown on large and bright LED displays. The run-time counter is auto-matically started when the basket rack assembly is lifted into the test media.The test stations of our ZT 320 series are driven individually. Each test station is controlled by its own keypad. After programming the required test run-time, the basket rack assembly with its loaded samples is automatically lowered into the media. On completion of the preset run-time or when the stop button is pressed, the basket rack is raised from the media to prevent further disintegration of the samples (optional).11Physicals Guide ZT 220 Series | ZT 320 Series | ZT 720 SeriesTouch display Automated detection of disintegration Memory of 1 million test results and 100 products LAN/USB data export100% USP / EP / JP compliant Automated disintegration tester with touch display ZT 720 SeriesThe ERWEKA ZT 720 series automatically determines the disintegra-tion time of samples by using a unique system of magnets and sen-sors. It also tests whether or not a sample completely disintegrates.The ZT 720 is available with one (ZT 721) or two (ZT 722) individuallydriven test stations and is equipped with an integrated flow-throughheater. Its temperature sensor PT 100 allows constant control of thewater bath temperature. The ZT 720 series is controlled through aninnovative 7” touch screen and is capable of storing and retrievingup to 100 products/methods with results and parameters.Select the basket type for your individual need: Basket type A comeswith 6 test tubes for standard tablets, basket type B contains 3 testtubes for bigger tablets (according to USP/EP standards).Effortless cleaning is easily possible due to the removable acrylicwater bath, equipped with an outlet valve. The USB and LAN inter-faces ensure simple and easy data export in XML and CSV format.12LED display Tapped density testing according to USP 1 or / and USP 2Easy to use 100% USP compliant Tapped density testerSVMTapped density testing according to USP methods 1 and 2The ERWEKA SVM series has been designed to measure tappedvolume and tapped density of powders, granules and similar pro-ducts. It is available for holding one or two glass cylinders and worksaccording USP method 1 (300 strokes/min; stroke height 14 mm) orUSP method 2 (250 strokes/min; stroke height 3 mm), which is equalto Pharm.Eur. and DIN ISO EN 787/11 requirements.As a special version, the SVM 223 offers two test methods simulta-neously: one test station operates according to USP method 1 andthe second test station according to USP method 2.Compliant glass cylinders are available in 100 ml,250 ml and 500 ml versions for the test stations. TheSVM 122 (one test station) and the SVM 222 (two teststations) meet USP 2 and EP standard requirementswith respect to strokes/min. and height of stroke. Aspecial version for highervolumes and weights isavailable on request.13Physicals Guide SVM | SVM Noisebox25 db noise reductionEffective noise reduction for tapped density testing SVM NoiseboxThe ERWEKA noise chamber is the perfect companion to our tap-ped density testers of the SVM series. Crafted from carefree plasticand lined with 30 mm thick white EPE dampening material, the noisechamber reduces the noise of a tapped density tester of approxi-mately 25 db(a) (measured from a standard, horizontal distance of0.65 m away).The noise chamber is easily accessible thanks to its front door withoutcompromising the possibility to observe the test. The SVM tappeddensity tester can be simply placed inside, its power supply can berouted through an opening on the back side.14Friability or abrasion drums selectable Variable RPM Built-in timer USB interfaceFriability / Abrasion testerTARUSP/EP/JP compliant friability/abrasion testerThe TAR series is a USP/EP/JP compliant ERWEKA unit for testing friability and/or abrasion of tablets. Programming is easily performedby the symbol style keypad. The rotation speed can be programmedbetween 20 and 100 rpm and test run duration can be set in eithertime or total number of revolutions.During the test run, the actual rotation speed and the remaining testrun time are shown at bright LED displays. For larger samples, thecomplete unit can be set to the USP/EP required 10° position by astandard switching leg.To increase the ease of handling on the TAR series, the friability drumsdo not have to be removed and opened for loading and emptying.Instead they can be effortlessly filled and emptied through a specialopening. On completion of a test run, the samples are automaticallyremoved into a container located under the drums.The optional USB interface allows you either to download the testparameters (time, actual/nominal speed) to a PC or receive a hard-copy print-out if a printer is connected.15Physicals GuideTAR| VDT / S100% USP compliant Easy to use LED display USB printingVacuum leak tester for blisters and other packaging formsVDT / SThe VDT/S is a vacuum leak tester for blisters and other packaging forms. The maximum vacuum (absolute pressure range up to 100 mbar) and the vacuum hold time before release can be easily set via the symbol keypad. The actual vacuum is continuously displayed on the LED display. Test run parameters such as actual/set vacuum value and hold time can be simply documented via a USB interface or a connected printer.Leak testingFor checking the density the ERWEKA VDT/S performs a methy-lene blue dye test, which is divided into several phases. During the pressure maintenance phase the blisters are exposed to a vacuum, which is generated in the vacuum container. Afterwards the container is ventilated. In the subsequent penetration process the blister is resting in the methylene blue solution, so that the solution can suck into any imperfectly sealed packaging.The integrated vacuum pump can be recalibrated using the optional validation kit which includes a vacuummeter, type DVR.16Granulateflow testingGranulate flow testingGranulate flow testerGTLGT & GTBThe GTL is the basic ERWEKA unit for testing flowcharacteristics of powders and granulates, to ensurethat accurate dosing is maintained.It supports the determination of the flow time of apre-weight sample (DAB 10) and the determinationof the flow time of a pre-defined sample volume.The GTL is handled by numeric membrane keysand the results are displayed by the illuminated LCdisplay. As standard, the unit is delivered with astainless steel hopper (200 ml) and three stainlesssteel outlet nozzles (10/15/25 mm) which can beexchanged by a quick coupling. Additional stain-less steel hoppers (100/480 ml) and outlet nozzles(6/8/11.3 mm) are available as options.On the GT a special balance is integrated into theunit to determine the flow time of a sample weightor pre-specified sample volume as well as thesample weight that falls within a specified flow time.For easy comparison a graph according to Listand Müller (mass/time) is calculated and displayedand/or printed.17Physicals GuideGTL | GT & GTB | SMG 53 466 & SMG 697Granulateflow testingManual powder and granulate density testing SMG 53 466 & SMG 697The manual ERWEKA SMG 697 and SMG 53466 are the units for thereproducible determination of apparent bulk density, which can beused with all free flowing powders or granulates. According to DINISO 697 and DIN 53 466, the apparent bulk density is determined bymeasuring the mass of powder in a receiver of known dimension afterfilling from a funnel of a specified shape under specified conditions.Included in the delivery are the apparatus SMG 697 or SMG 53466,operating instructions and a calibration certificate.18Suppository melting point testing Suppositorypenetration testingSuppository melting point testerSuppository penetration testerSSPPM 30The ERWEKA SSP measures the melting point of suppository samples. It consists of a graduated tube with an integrated test chamber made of glass. The sample to be tested is placed in the spiral sha-ped glass test basket inside the test chamber, which is surrounded by a water jacket.The water inside the jacket can be simply heated by the optional circulation heater EST 2 and the melting point is determined by a stop watch.The ERWEKA PM 30 measures the softening timeof suppositories. Suppositories must disintegrate,dissolve or melt at body temperature in order torelease their active ingredients to the body. ERWEKAoffers a version for USP method A and method B.The PM 30 penetration tester (compliant to EP ,Apparatus A) and the PM 3 (acc. to EP , App. B) havebeen designed to carry out reproducible measure-ments regarding the softening time of suppositoriesat predetermined temperatures. The constructionof the tester makes visual observation of the mel-ting characteristics extremely simple. In total, theunit comprises of three test stations.19Physicals Guide SSP | PM 30 | ST 35 | SBT 2Suppository disintegration testingSuppository hardness testing by weightThe ERWEKA suppository disintegration tester ST 35 comes with three turning test stations, each located inside a four liter glass vessel with an optional magnetic stirrer. Additionally, the unit contains a ther-mostatically heated water bath, in which the test stations are placed.The test stations are automatically turned 180° inadjustable intervals. The ST 35 features an integra-ted flow-through heating system (accuracy ± 0.2°C) and an internal temperature sensor for tempe-rature display.Test time and nominal bath temperature are easilyentered via the membrane keys. Current test timeas well as actual water temperature are shown on aLED display. On request, an alarm may be selectedto sound upon completion of the preset test time.D ue to the width of the ST 35, the test stations can be easily separated to facilitate the cleaning process.The suppository hardness tester (type SBT 2) consists of an elec-trically heated chamber with an integrated sample holder and a number of interchangeable plastic inserts to accept various sized suppositories. Once up to the desired temperature, the hardness is checked by weights (included in the standard delivery range) which are gradually placed on the device until the suppository collapses under the load of the added weights.The results are expressed in terms of total weight required to bring about the collapse of the suppository.Suppository disintegration testerSuppository hardness testerST 35SBT 2E-Mail: sal e s@e rw e Phone: +49 6104 6903-0Fax: +49 6104 6903-40ERWEKA GmbHOttostr. 20-2263150 HeusenstammGermany Technical specifications of products described are stated without warranty and subject to change at any time without further notice. v.2.0.3.18ContactE-Mail:****************Tel.: +49 6104 6903-0Fax: +49 6104 6903-40***************************************/erweka.gmbhAre you curious and want to find out more?Head over to our website and download our product brochures,watch videos of our equipment in action or find the ERWEKAdealer of your country.。
Geodetic Surveying and Plane SurveyingSurveying has been traditionally defined as the art and science of determining the position of natural and artificial features on, above or below the earth’s surface; and representing this information in analog form as a contoured map, paper plan or chart, or as figures in report tables, or in digital form as a three dimensional mathematical model stored in the computer. As such, the surveyor/geodesist dealt with the physical and mathematical aspect of measurement. The accurate determination and monumentation of points on the surface of the Earth is therefore seen as the major task.Though these surveys are for various purposes, still the basic operations are the same---they involve measurements and computations or, basically, fieldwork and office work. There are many different types of surveys such as land surveys, route surveys, city surveys, construction surveys, hydrographic surveys, etc., but generally speaking, surveying is divided into two major categories: geodetic and plane surveying.Surveys will either take into account the true shape of the Earth(Geodetic surveys)or treat the earth as a flat surface(Plane surveys). Additionally, surveys are conducted for the purpose of positioning features on the ground(Horizontal surveys), determining the elevation or heights of features(Vertical surveys) or a combination of both.Geodetic SurveyingThe type of surveying that takes into account the true shape of the earth is called geodetic surveying.This type of survey is suited for large areas and long lines and is used to find the precise location of basic points needed for establishing control for other surveys. In geodetic surveys, the stations are normally long distances apart, and more precise instruments and surveying methods are required for this type of surveying than for plane surveying.Widely spaced, permanent monuments serve as the basis for computing lengths and distances between relative positions. These basic points with permanent monuments are called geodetic control survey points, which support the production of consistent and compatible data for surveying and mapping projects. In the past, ground-based theodolites, tapes, and electronic devices were the primary geodetic field measurements used. Today, the technological expansion of GPS has made it possible to perform extremely accurate geodetic surveys at a fraction of the cost.A thorough knowledge of the principles of geodesy is an absolute prerequisite for the proper planning and execution of geodetic surveys.In Geodetic Surveys, the shape of the earth is thought of as a spheroid, although in a technical sense, it is not really a spheroid. Therefore, distances measured on or near the surface of the earth are not along straight lines or planes, but on a curved surface. Hence, in the computation of distances in geodetic surveys, allowances are made for the earth’s minor and major diameters from which a spheroid of reference is developed. The position of each geodetic station is related to this spheroid. The positions are expressed as latitudes(angles north or south of the Equator) and longitudes(angles east or west of a prime meridian) or as northings and eastings on a rectangular grid.A geodetic survey establishes the fundamentals for the determination of the surface and gravity field of a country. This is realized by coordinates and gravity values of a sufficiently large number of control points, arranged in geodetic and gravimetric networks. In this fundamental work, curvature and the gravity field of the earth must be considered.The type of surveying in which the mean surface of the earth is considered a plane, or in which the curvature of the earth can be disregarded without significant error, generally is called plane surveying. The term is used to designate survey work in which the distances or areas involved are of limited extent. With regard to horizontal distances and directions, a level line is considered mathematically straight, the direction of the plumb line is considered to be the same at all points within the limits of the survey, and all angles are considered to be plane angles. To make computations in plane surveying, you will use formulas of plane trigonometry, algebra, and analytical geometry. For small areas, precise results may be obtained with plane surveying methods, but the accuracy and precision of such results will decrease as the area surveyed increases in size. For example, the length of an arc 18.5 km long lying in the earth’s surface is only 7mm greater than the subtended chord and, further, the difference between the sum of the angles in a plane triangle and the sum of those in a spherical triangle is only 0.51 second for a triangle at the earth’s surface having an area of 100km2 . It will be appreciated that the curvature of the earth must be taken into consideration only in precise surveys of large areas.A great number of surveys are of the plane surveying type.Surveys for the location and construction of highways, railroads, canals, and in general, the surveys necessary for the works of human beings are plane surveys, as are the surveys made to establish boundaries, except state and national. However, with the increasing size and sophistication of engineering and other scientific projects, surveyors who restrict their practice to plane surveying are severely limited in the types of surveys in which they can be engaged. The operation of determining elevation usually is considered a division of plane surveying. Elevations are referred to the geoid. The geoid is theoretical only.It is the natural extension of the mean sea level surface under the landmass. We could illustrate this idea by digging an imaginary trench across the country linking the Atlantic and Pacific oceans.If we allowed the trench to fill with seawater, the surface of the water in the trench would represent he geoid. So for all intents and purposes, the geoid is the same as mean sea level. Mean sea level is the average level of the ocean surface halfway between the highest and lowest levels recorded. We use mean sea level as a datum or, curiously and incorrectly, a datum plane upon which we can reference or describe the heights of features on, above or below the ground. Imagine a true plane tangent to the surface of mean sea level at a given point. At horizontal distances of 1km from the point of tangency, the vertical distances(or elevations) of the plane above the surface represented by mean sea level are 7.8cm. Obviously, curvature of the earth’s surface is a factor that cannot be neglected in obtaining even rough values of elevations. The ordinary procedure in determining elevations, such as balancing backsight and foresight distance in differential leveling, automatically takes into account the curvature of the earth and compensates for earth curvature and refraction, and elevations referred to the curved surface of reference are secured without extra effort by the surveyor.There is close cooperation between geodetic surveying and plane surveying. The geodetic survey adopts the parameters determined by measurements of the earth, and its own results are available to those who measure the earth. The plane surveys, in turn, are generally tied to the control points of the geodetic surveys and serve particularly in the development of national map series and in the formation of real estate cadastres.Below we are about measure distance, Angle and Direction Measurement and Traversing. Distance MeasurementOne of the fundamentals of surveying is the need to measure distance. Distances are not necessarily linear, especially if they occur on the spherical earth. In this subject we will deal with distances in Euclidean space, which we can consider a straight line from one point or feature to another. Distance between two points can be horizontal, slope, or vertical. Horizontal and slope distances can be measured with lots of techniques of measurement depending on the desired quality of the result. If the points are at different elevations, then the distance is the horizontal length between plumb lines at the points. Here gives a brief summary of relevant techniques and their respective accuracies:Pacing and OdometerPacing is a very useful form of measurement though it is not precise, especially when surveyors are looking for survey marks in the field. Pacing can be performed at an accuracy level of 1/100~1/500 when performed on horizontal land, while the accuracy of pacing can’t be relied upon when pacing up or down steep hills. The odometer is a simple device that can be attached to any vehicle and directly registers the number of revolutions of a wheel. With the circumference of the wheel known, the relation between revolutions and distance is fixed.Ordinary Taping and Precise TapingTaping is a very common technique for measuring horizontal distance between two points. Ordinary taping refers to the very common tapes that we can buy them in stores, such as the plastic tapes or poly tapes. Such tapes have low precision in distance measurements with about 1/3000~1/5000. The precise taping refers to the steel tapes and which are much more expensive than the plastic tape and have higher precision of 1/10000~1/30000. Invar tapes are composed 35% nickel and 65% steel. This alloy has a very low coefficient of thermal expansion, making the tapes useful in precise distance measurement. Many tapes are now graduated with foot units on one side and metric units on the reverse side. Metric units are in meters, centimeter and minimeter with the total length of 20 m, 30 m, 50 m and 100 m.If we want to measure the horizontal distance between the two points A and B, we can do like this: With zero of the tape to the higher point B and tape going along the point A, we can measure the horizontal distance by using the plumb bob with pump line entering to the point A. To judge the exact horizontal line, we should move the tape up and down along the pump line and we will find the changes of reading in the tape. The shortest reading of the tape is the horizontal distance.If the distance is longer than the length of tape, then we can divide the long distance into several segments and get the total distance by plus each segment together. Since different tapes have different starts of zero of the tapes, it is very important to judge where the zero of the tape begins. Tacheometry and StadiaTacheometry is an optical solution to the measurement of distance. The word is derived from the Greek Tacns, meaning “swift”, and metrot, meaning “a measure”. Tacheometry involves the measurement of a related distance parameter either by means of a fixed-angle intercept. Theodolite tacheometry is an example of stadia system.The theodolite is directed at the level staff where the staff is held vertically and the line of sight of the telescope is horizontal.By reading the top and bottom stadia hairs on the telescope view and then the horizontal distance from center of instrument to rod can be obtained by multiplying the stadia interval factor K by the stadia interval and plus the distance C which is from the center of instrument to principal focus, i.e. D=Ks + C. Usually the nominal stadia interval factor K equals 100 which is a constant for a particular instrument as long as conditions remain unchanged, but it may be determined by observation in practice. The value of C is determined by the manufacturer and stated on the inside of the instrument box. For external-focusing telescopes, under ordinary condition, C may be considered as 1 ft without error of consequence. Internal-focusing telescopes are so constructed that C is 0 or nearly so; this is an advantage of internal-focus telescopes for stadia work. Most instruments now used for stadia are equipped with internal-focusing telescopes.Applications of tacheometry include traversing and leveling for the topographic surveys, location of detail surveys, leveling and field completion surveys for the topographic mapping, and hydrographic mapping. The relative precision is 1:1000 to 1:5000.Stadia is a form of tacheometry that uses a telescopic cross-hair configuration to assist in determining distances.A series of rod readings is taken with a theodolite and the resultant intervals are used to determine distances.Electronic Distance Measurement(EDM)The Electronic Distance Measurement(EDM) was first introduced in 1950s by the founders of Geodimeter Inc. The advent of EDM instrument has completely revolutionized all surveyingprocedures, resulting in a change of emphasis and techniques. Distance can now be measured easily, quickly and with great accuracy, regardless of terrain conditions.EDM instruments refer to the distance measurement equipments using light and radio waves. Both light waves and radio waves are electromagnetic. They have identical velocities in a vacuum (or space) to 299,792.458±0.001km/sec.These velocities, which are affected by the air’s density, are reduced and need to be recalculated in the atmosphere. The basic principle of EDM instruments is that distance equals time multiplied by velocity.Thus if the velocity of a radio or light wave and time required for it to go from one point to another are known, the distance between the two points can be calculated.The EDM instruments may be classified according to the type and wavelength of the electromagnetic energy generated or according to their operational range. EDM instruments use three different wavelength bands: (1)Microwave systems with range up to 150km, wave length 3 cm, not limited to line of sight and unaffected by visibility; (2)Light wave systems with range up to 5 km (for small machines), visible light, lasers and distance reduced by visibility; (3)Infrared systems with range up to 3 km, limited to line of sight and limited by rain, fog, other airborne particles. Although there is a wide variety of EDM instruments available with different wavelengths, there are basically only two methods of measurement employed which may divide the instruments into two classification as electro-optical (light waves) and microwaves (radio waves) instruments. These two basic methods are namely the pulse method and more popular phase different method. They function by sending light waves or microwaves along the path to be measured and measuring the time differences between transmitted and received signals, or in measuring the phase differences between transmitted and received signals in returning the reflecting light wave to source. Modern EDM instruments are fully automatic to such an extent that, after the instruments, set up on one station, emits a modulated light beam to a passive reflector set up on the other end of the line to be measured. The operator need only depress a button, and the slope distance is automatically displayed. More complete EDM instruments also have the capability of measuring horizontal and vertical or zenith angles as well as the slope distance. These instruments referred to as total station instruments.Angle and Direction MeasurementHorizontal and vertical angles are fundamental measurements in surveying. It is necessary to be familiar with the meanings of certain basic terms before describing angle and direction measurement. The terms discussed here have reference to the actual figure of the earth.Basic TermsA vertical line at any point on the earth’s surface is the line that follows the direction of gravity at that point.It is the direction that a string will assume if a weight is attached at that point and the string is suspended freely at the point.At a given point there is only one vertical line.A horizontal line at a point is any line that is perpendicular to the vertical line at the point.At any point there are an unlimited number of horizontal lines.A horizontal plane at a point is the plane that is perpendicular to the vertical line at the point. There is only one horizontal plane through a given point.A vertical plane at a point is any plane that contains the vertical line at the point.There are an unlimited number of vertical planes at a given point.Horizontal Angle and Vertical AngleA horizontal angle is the angle formed in a horizontal plane by two intersecting vertical planes, or a horizontal angle between two lines is the angle between the projections of the lines onto a horizontal plane. For example, observations to different elevation pointsB andC from A will give the horizontal angle ∠bac which is the angle between the projections of two lines (AB and AC) onto the horizontal plane. It follows that, although the points observed are at different elevations, it is always the horizontal angle and not the space angle that is measured (Figure 1). The horizontal angle is used primarily to obtain relative direction to a survey control point, or topographic detail points, or to points to be set out.A vertical angle is an angle measured in a vertical plane which is referenced to a horizontal line by plus (up) or minus (down) angles, or to a vertical line from the zenith direction. Plus and minus vertical angles are sometimes referred to as elevation or depression angles, respectively. A vertical angle thus lies between 0°and ±90°. Zenith is the term describing points on a celestial sphere that is a sphere of infinitely large radius with its center at the center of the earth. The zenith is anangle measured in a vertical plane downward from an upward directed vertical line through the instrument. It is thus between 0°and 180°. Obviously the zenith angle is equal to 90°minus the vertical angles. Vertical angles or zeniths are used in the correction of slope distance to the horizontal or in height determined. For the most part, the instrument used in the measurement of angles is called a transit or theodolite, although angles can be measured with clinometers, sextants (hydrographic surveys), or compasses.The theodolite contains a horizontal and vertical circles of either glass or silver.The horizontal and vertical circles of theodolite can be linked to circular protractors graduated from 0°to 360°in a clockwise manner set in horizontal and vertical plane. The horizontal circle is used when measuring or laying off horizontal angles and the vertical circle is used to measure or lay off vertical angles or zenith angles. Usually the units of angular measurement employed in practice are degrees, minutes, and seconds, the sexagesimal system.Angle MeasurementA horizontal angle in surveying has a direction or sense; that is, it is measured or designed to the right or to the left, or it is considered clockwise or counterclockwise. In the above figure, the angle at A fromB toC is clockwise and the angle from C to B is counterclockwise. With the theodolite set up, centered, and leveled over at station A, then a simple horizontal angle measurement between surveying point B, A and C would be taken as follows:⑴Commencing on, say, “face left”, the target set at survey point B is carefully bisected and the reading on horizontal scale is 25°. ⑵The upper plate clamp is released and telescope is turned clockwise to survey point C. The reading on horizontal circle is 75°⑶The horizontal angle is then the difference of the two directions, i.e. (75°-25°) =50°(⑷Change face and observe point C on “face right”, and note the reading=255°⑸Release upper plate and swing counterclockwise to point B and note the reading =205°⑹The reading or the direction must be subtracted in the same order as 255°-205°=50°⑺The mean of two values would be accepted if they are in acceptable agreement. Modern electronic digital theodolites contain circular encoders that sense the rotations of the spindles and the telescope, convert these rotations into horizontal and vertical (or zenith) angles electronically, and display the value of the angles on liquid crystal displays (LCDs) or light-emitting diode displays (LEDs). These readouts can be recorded in a conventional field book or can be stored in a data collector for future printout orcomputation. The instrument contains a pendulum compensator or some other provision for indexing the vertical circle readings to an absolute vertical direction.The circle can be set to zero readings by a simple press of a button or initialized to any value on the instrument.Azimuth is the horizontal angle measured in a clockwise direction from the plane of the meridian, which is a line on the mean surface of the earth joining the north and south poles. Azimuth ranges in magnitude from 0°to 360°, values in excess of 360°, which are sometimes encountered in computations, are simply reduced by 360°before final listing.Bearing is the traditional way of stating the orientation of the line. It is actually the angle measured from the north or south.The bearing, which can be measured clockwise or counterclockwise from the north or south end of the meridian, is always accompanied by letters that locate the quadrant in which the line falls. For example, bearing N32W indicates a line trending 32°west of the north. It is equal to an azimuth of 328°.Bearing S12W indicates a line trending 12°west of the south. It is equal to an azimuth of 192°. It is important to state that the bearing and azimuth are respect to true north..TraversingThe purpose of the surveying is to locate the positions of points on or near the surface of the earth. To determine horizontal positions of arbitrary points on the earth’s surface and elevation of points above or below a reference surface are known as a control survey.The positions and elevations of the points make up a control network.There are different types of control networks depending on where and why they are established.A control network may have very accurate positions but no elevations (called a Horizontal Control Network) or very accurate elevations but no positions (called a Vertical Control Network).Some points in a control network have both accurate positions and elevations.Control networks range from small, simple and inexpensive to large and complex and very expensive to establish.A control network may cover a small area by using a “local” coordinate system that allows you to position the features in relation to the control network but doesn’t tell you where the features areon the surface of the earth, or cover a large area by consisting of a few well-placed and precise-established control points, which is sometimes called the primary control.The horizontal positions of points in a network can be obtained in a number of different ways.(The generally used methods are triangulation, trilateration, traversing, intersection, resection and GPS.The main topic of this text refers to the traversing.TriangulationThe method of surveying called triangulation is based on the trigonometric proposition that if one side and three angles of a triangle are known, the remaining sides can be computed by the law of sines.Furthermore, if the direction of one side is known, the direction of the remaining sides can be determined.And then coordinates of unknown points can be computed by application of trigonometry.TrilaterationSince the advent of long-range EDM instrument, a method of surveying called trilateration was adopted to combine with triangulation.The trilateration is based on the trigonometric proposition that if the three sides of a triangle are known, the three angles can be computed by the law of cosines.Trilateration possesses some advantages over triangulation because the measurement of the distances with EDM instrument is so quick, precise and economical while the measurement of the angles needed for triangulation may be more difficult and expensive. For some precise projects, the combination of triangulation and trilateration which is called triangulateration is applied.TraversingA survey traverse is a sequence of lengths and directions of lines between points on the earth, obtained by or from field angle and distance measurements and used in determining positions of the point. The angles are measured using transits, theodolites, or total stations, whereas the distances can be measured using steel tapes or EDM instruments. A survey traverse may determine the relative positions of the points that if connects in series, and if tied to control stations based on some coordinate system, the positions may be referred to that system. From these computed relative positions, additional data can be measured for layout of new features, such as buildings and roads. Since the advent of EDM equipment, traversing has emerged as the most popular method to establish control networks such as basic area control, mapping, control of hydrographic surveys and construction projects.In engineering surveying, it is ideal way to surveys and dimensional control of route-type projects such as highway, railroad, and pipeline construction. In general, a traverse is always classified as either an open traverse or a closed traverse. An open traverse originates either at a point of known horizontal position with respect to a horizontal datum or at an assumed horizontal position, and terminates at a station whose relative position is not previously known..The open traverse provides no check against mistakes and large errors for its termination at anunknown horizontal position and lack of geometric closure. This lack of geometric closure means that there is no geometric verification possible with respect to the actual positioning of the traverse stations. Thus, the measuring technique must be refined to provide for field verification. At a minimum, distances are measured twice and angles are doubled. Open traverses are often used for preliminary survey for a road or railroad.A closed traverse can be described in any one of the following two ways: ⑴A closed loop traverse, as the name implies, forms a continuous loop, enclosing an area.This type of closed traverse starts at assumed horizontal position or at a known horizontal position with respect to a horizontal datum and ends at the same point. ⑵A connecting traverse starts and ends at separate points, whose relative positions have been determined by a survey of equal or higher order accuracy. A known horizontal position is defined by its geographic latitude and longitude, or by its X and Y coordinates on a grid system.Closed traverses, whether they return to the starting point or not, provide checks on the measured angles and distances.In both cases, the angles can be closed geometrically, and the position closure can be determined mathematically. Therefore they are more desirable and used extensively in control, construction, property, and topographic surveys.As we mentioned above, a closed traverse provides checks on the measured angles and distances. For example, the geometric sum of the interior angles in an n-side closed figure should be (n-2)×180°, but due to systematic and random errors of the measurements, when all the interior angles of a closed traverse are summed, they may or may not total the number of degrees required for geometric closure. The difference between the geometric sum and actual field sum of the interior angles is called angular closure. The total error of angular closure should be distributed evenly to each angle (if all angles were measured with the same precision) before mathematical analysis of the traverse. The important point before doing this is that the overall angular closure can’t be beyond the survey specifications.Closed traverses provide also checks on the measured distances, and the position closure can be determined mathematically, which means that an indication of the consistency of measuring distances as well as angles should be given to a traverse that closes on itself. Theoretically this position closure from the origin back to itself should be zero. But the Errors in the measured distances and angles of the traverses, however, will tend to alter the shape of the traverse, therefore we should compute the algebraic sum of the latitudes and algebraic sum of the departures, and compare them with the fixed latitude and departure of a straight line from the origin to the closing point. By definition, latitude here is the north/south rectangular component of a line and departure is the east/west rectangular component of a line. To differentiate direction, north is considered plus, whereas south is considered minus.Similarly, east is considered plus, whereas west is considered minus.Then the discrepancy should be adjusted by apportioning the closure both in latitudes and in departures on a reasonable basis. The adjusted position of each traverse point is determined with respect to some origin.This position is defined by its Y coordinates and its X coordinates with respect to a plane rectangular coordinate system in which the Y axis is assumed north-south whereas the X axis east-west.。
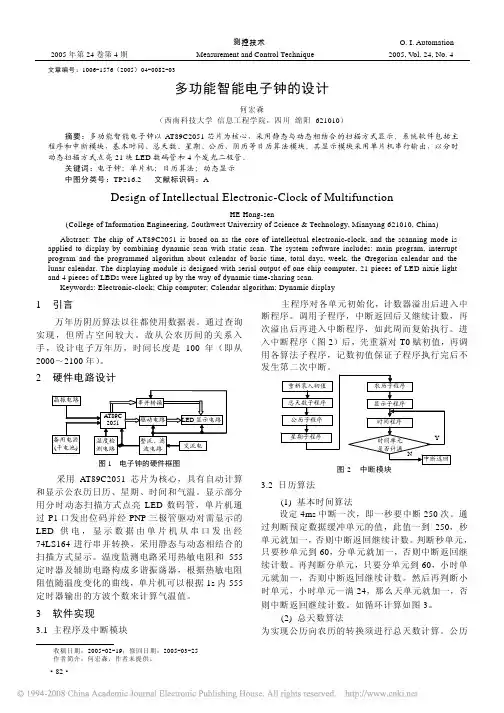
文章编号:1006-1576(2005)04-0082-03多功能智能电子钟的设计何宏森(西南科技大学信息工程学院,四川绵阳 621010)摘要:多功能智能电子钟以AT89C2051芯片为核心,采用静态与动态相结合的扫描方式显示。
系统软件包括主程序和中断模块,基本时间、总天数、星期、公历、阴历等日历算法模块。
其显示模块采用单片机串行输出,以分时动态扫描方式点亮21块LED数码管和4个发光二极管。
关键词:电子钟;单片机;日历算法;动态显示中图分类号:TP216.2 文献标识码:ADesign of Intellectual Electronic-Clock of MultifunctionHE Hong-sen(College of Information Engineering, Southwest University of Science & Technology, Mianyang 621010, China)Abstract: The chip of AT89C2051 is based on as the core of intellectual electronic-clock, and the scanning mode is applied to display by combining dynamic scan with static scan. The system software includes: main program, interrupt program and the programmed algorithm about calendar of basic time, total days, week, the Gregorian calendar and the lunar calendar. The displaying module is designed with serial output of one chip computer, 21 pieces of LED nixie light and 4 pieces of LBDs were lighted up by the way of dynamic time-sharing scan.Keywords: Electronic-clock; Chip computer; Calendar algorithm; Dynamic display1 引言万年历阴历算法以往都使用数据表。
基于AOI门和MULTI-INPUT复合门搭建的触发器摘要:QCA定义了一种量子元胞结构,提供了一种纳米水平的结构,适用于数字电路。
这个技术的基本逻辑元素是多数门和反相器,近年来有人结合多数门和反相器设计出不同种结构的符合逻辑门,使实现一些功能的时候可以减小电路图尺寸和元胞使用数,简化QCA电路。
本文使用简化的输出表达式选取合适的复合门并加以改造使电路更加简单,元胞更加减少,性能更加稳定。
由此在MULTI-INPUT 复合门和AOI门的基础上设计了多种可测试触发器(RS触发器、JK触发器、D触发器、T触发器)。
这些触发器都在QCADesigner软件中得以仿真实现。
关键词:量子信息QCA触发器AOI门MULTI-INPUT复合门引言近几十年在微电子领域,微电子器件的集成度和运算速度持续呈现指数级增长,但是由于功率耗散和相互连接等问题使得基于传统CMOS 技术的器件尺寸的进一步减小变得不太可能【1】。
同时随着器件尺寸的进一步减少,越来越多的问题也逐渐暴露出来,一些微观世界中特有的物理现象如量子效应逐渐表现出来,从而使得基于传统的设计方法设计的电路的性能与实际结果有着明显的偏差。
这样我们就要提出一种与传统的CMOS器件技术不同的设计思路来使微电子器件继续朝纳米级方向发展,即主动利用量子效应来构造新的数字逻辑器件并实现数字逻辑系统。
正因如此,基于量子细胞自动机(Quantum-dot Cellular Automata, QCA)的器件应运而生。
应用量子元胞自动机的基本逻辑门多数门和反相器可以实现各种各样的逻辑电路,例如Tougaw 等人【2】设计的异或门和全加器,王森等人结合量子细胞自动机的双稳态特性和传统的COMS工艺设计存储器的思想,设计了4×5bit的只读存储器【3】等等。
还有为了实现一些复合逻辑并且减少元胞使用数量简化QCA电路有人设计仿真了一些复合逻辑门,比如说Conservative QCA Gate (CQCA)【4】,F门,AOI门等等,其中AOI门有多种实现方式,Jing Huang, Mariam Momenzadeh, Mehdi B. Tahoori and Fabrizio Lombardi通过调整元胞之间的距离来实现与或非功能【5】,并进行了测试,提出了基于这种AOI门的多个标准功能的表达【6】。
建筑工程类英语Construction Engineering in EnglishIntroduction:Construction engineering is a diverse and multidisciplinary field that encompasses the planning, design, construction, and maintenance of various structures and infrastructures. In this article, we will explore some key terms and concepts related to construction engineering in English.1. Key Vocabulary:Below are important terms related to construction engineering:1.1 Construction Methods:- Design-build: A construction method where the design and construction processes are combined into one contract.- Construction management: A project delivery strategy where a construction manager is hired to oversee and coordinate the construction process.- Design-bid-build: A traditional construction method where the project is designed by architects and engineers, and then put out to bid, with the construction contract awarded to the lowest bidder.1.2 Construction Materials:- Concrete: A composite material made up of aggregate, cement, and water, used for the construction of foundations, walls, and other structures.- Steel: A versatile and durable construction material, commonly used for the construction of bridges, high-rise buildings, and infrastructure.- Timber: Wood used in construction, often in the form of beams, columns, and planks for structural support.1.3 Construction Equipment:- Excavator: Heavy machinery used for digging trenches, foundations, and earthmoving operations.- Crane: A mechanical device equipped with a tower or derrick used for lifting and moving heavy materials or equipment.- Bulldozer: A powerful tracked vehicle equipped with a blade used for pushing large quantities of soil, rubble, or other materials.2. Construction Project Phases:A construction project typically consists of several phases, including:2.1 Pre-construction Phase:- Project initiation: Identifying the need for the project and establishing its goals and objectives.- Site investigation: Assessing the site's suitability for construction and identifying potential constraints, such as soil conditions or environmental factors.- Preliminary design: Developing initial design concepts and evaluating their feasibility.2.2 Construction Phase:- Mobilization: Setting up the construction site, including temporary facilities and infrastructure.- Construction activities: Executing the construction work according to the approved design and specifications.- Quality control: Monitoring and inspecting the construction work to ensure compliance with the quality requirements.2.3 Post-construction Phase:- Commissioning: Testing and verifying the performance of the constructed facility or infrastructure.- Handover: Transferring the completed project to the owner or client.- Maintenance and operation: Conducting regular maintenance and managing the facility's operation to ensure its long-term functionality.3. Commonly Used Construction Documents:Certain documents are crucial throughout the construction process, including:3.1 Construction Drawings:- Architectural drawings: Detailed plans, elevations, and sections showing the layout and design of a structure.- Structural drawings: Diagrams illustrating the load-bearing elements, such as beams and columns, to ensure structural integrity.- MEP drawings: Mechanical, electrical, and plumbing drawings showing the locations and specifications of these systems within a structure.3.2 Specifications:- Project specifications: Detailed written descriptions of the materials, methods, and performance requirements for construction.- Product specifications: Specifications specific to particular construction products or materials, ensuring their quality and compatibility.Conclusion:Construction engineering is a dynamic field with its own specialized vocabulary, project phases, and documentation. By familiarizing oneself with these terms and concepts in English, professionals in the construction industry can efficiently communicate and collaborate on construction projects worldwide.。
第25卷2006年第5期5月机械科学与技术MECHAN I C AL SC I E NCE AND TECHNOLOGY Vol .25May No .52006收稿日期:20050510基金项目:国家自然科学基金项目(50175043)资助作者简介:张义民(1958-),男(汉),教授,博士生导师E 2mail:zhangy m@public .cc .jl .cn张义民 文章编号:100328728(2006)0520616203钢板弹簧的可靠性分析的参数灵敏度张义民,刘巧伶,闻邦椿(东北大学机械工程与自动化学院,沈阳 110004)摘 要:讨论了钢板弹簧的可靠性分析的参数灵敏度问题,提出了可靠性灵敏度分析的计算方法,研究了正态分布设计参数的改变对钢板弹簧可靠性的影响,为钢板弹簧的可靠性设计提供了理论依据。
关 键 词:钢板弹簧;可靠性设计;灵敏度中图分类号:U463 文献标识码:AParam etr i c Sen siti v ity i n Reli a b ility Ana lysis of a M ulti 2leaf Spr i n gZhang Yi m in,L iu Q iaoling,W en Bangchun(College ofMechanical Engineering and Aut omati on,Northeastern University,Shenyang 110004)Abstract:The para metric sensitivity in reliability analysis of a multi 2leaf s p ring is extensively discussed and a calculati on method f or reliability sensitivity analysis is p resented .The effects of changes in a nor 2mally distributed design para meters on reliability of the multi 2leaf s p ring are studied .The method p resen 2ted here p r ovides a theoretical basis f or its reliability design .Key words:multi 2leaf s p ring;reliability analysis;sensitivity 可靠性工程研究的主要内容是产品的可靠性设计、试验和验证。

改革开放以来,随着我国工业的迅速发展和科学技术的进步,电气控制技术在工业上的运用也越来越广泛,对于一个国家的科技水平高低来说,电气控制技术水平是一项重要的衡量因素.电气控制技术主要以电动机作为注重的对象,通过一系列的电气控制技术,买现生产或者监控的自动化.下面是搜索整理的电气控制英文参考文献,欢迎借鉴参考。
电气控制英文参考文献一: [1]Laiqing Xie,Yugong Luo,Donghao Zhang,Rui Chen,Keqiang Li. Intelligent energy-saving control strategy for electric vehicle based on preceding vehicle movement[J]. Mechanical Systems andSignal Processing,2019,130. [2]F.N. Tan,Q.Y. Wong,W.L. Gan,S.H. Li,H.X. Liu,F. Poh,W.S. Lew. Electric field control for energy efficient domain wallinjection[J]. Journal of Magnetism and Magnetic Materials,2019,485. [3]N. Nursultanov,W.J.B. Heffernan,M.J.W.M.R. van Herel,J.J. Nijdam. Computational calculation of temperature and electrical resistance to control Joule heating of green Pinus radiata logs[J]. Applied Thermal Engineering,2019,159. [4]Min Cheng,Junhui Zhang,Bing Xu,Ruqi Ding,Geng Yang. Anti-windup scheme of the electronic load sensing pump via switchedflow/power control[J]. Mechatronics,2019,61. [5]Miles L. Morgan,Dan J. Curtis,Davide Deganello. Control of morphological and electrical properties of flexographic printed electronics through tailored ink rheology[J]. OrganicElectronics,2019,73. [6]Maciej ?awryńczuk,Pawe?Oc?oń. Model Predictive Control and energy optimisation in residential building with electric underfloor heating system[J]. Energy,2019,182. [7]Lorenzo Niccolai,Alessandro Anderlini,GiovanniMengali,Alessandro A. Quarta. Electric sail displaced orbit control with solar wind uncertainties[J]. Acta Astronautica,2019,162. [8]Patrik Beňo,Matej Kubi?. Control and stabilization of single-wheeled electric vehicle with BLDC engine[J]. Transportation Research Procedia,2019,40. [9]André Murilo,Rafael Rodrigues,Evandro Leonardo SilvaTeixeira,Max Mauro Dias Santos. Design of a Parameterized Model Predictive Control for Electric Power Assisted Steering[J]. Control Engineering Practice,2019,90. [10]Kazusa Yamamoto,Olivier Sename,Damien Koenig,Pascal Moulaire. Design and experimentation of an LPV extended state feedback control on Electric Power Steering systems[J]. Control EngineeringPractice,2019,90. [11]Pedro de A. Delou,Julia P.A. de Azevedo,Dinesh Krishnamoorthy,Maurício B. de Souza,Argimiro R. Secchi. Model Predictive Control with Adaptive Strategy Applied to an Electric Submersible Pump in a Subsea Environment[J]. IFACPapersOnLine,2019,52(1). [12]Unal Yilmaz,Omer Turksoy,Ahmet Teke. Intelligent control of high energy efficient two-stage battery charger topology forelectric vehicles[J]. Energy,2019,186. [13]Qiuyi Guo,Zhiguo Zhao,Peihong Shen,Xiaowen Zhan,Jingwei Li. Adaptive optimal control based on driving style recognition forplug-in hybrid electric vehicle[J]. Energy,2019,186. [14]Leonid Lobanov,Nikolai Pashсhin. Electrodynamic treatment by electric current pulses as effective method of control of stress-strain states and improvement of life of welded structures[J]. Procedia Structural Integrity,2019,16. [15]Evangelos Pournaras,Seoho Jung,Srivatsan Yadhunathan,Huiting Zhang,Xingliang Fang. Socio-technical smart grid optimization via decentralized charge control of electric vehicles[J]. Applied Soft Computing Journal,2019,82. [16]Guoming Huang,Xiaofang Yuan,Ke Shi,Xiru Wu. A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle[J]. Journal of the Franklin Institute,2019,356(13). [17]Ioannis Kalogeropoulos,Haralambos Sarimveis. Predictive control algorithms for congestion management in electric power distribution grids[J]. Applied Mathematical Modelling,2020,77. [18]Junjun Zhu,Zhenpo Wang,Lei Zhang,David G. Dorrell.Braking/steering coordination control for in-wheel motor drive electric vehicles based on nonlinear model predictive control[J]. Mechanism and Machine Theory,2019,142. [19]Jiechen Wu,Junjie Hu,Xin Ai,Zhan Zhang,Huanyu Hu. Multi-time scale energy management of electric vehicle model-based prosumers by using virtual battery model[J]. Applied Energy,2019,251. [20]G. Coorey,D. Peiris,T. Usherwood,L. Neubeck,J. Mulley,J. Redfern. An Internet-Based Intervention Integrated with the Primary Care Electronic Health Record to Improve Cardiovascular Disease Risk Factor Control: a Mixed-Methods Evaluation of Acceptability, Usage Trends and Persuasive Design Characteristics[J]. Heart, Lung and Circulation,2019,28. [21]Félice Lê-Scherban,Lance Ballester,Juan C. Castro,Suzanne Cohen,Steven Melly,Kari Moore,James W. Buehler. Identifying neighborhood characteristics associated with diabetes and hypertension control in an urban African-American population usinggeo-linked electronic health records[J]. Preventive Medicine Reports,2019,15. [22]Yuekuan Zhou,Sunliang Cao. Energy flexibility investigation of advanced grid-responsive energy control strategies with thestatic battery and electric vehicles: A case study of a high-rise office building in Hong Kong[J]. Energy Conversion and Management,2019,199. [23]D. Aravindh,R. Sakthivel,B. Kaviarasan,S. MarshalAnthoni,Faris Alzahrani. Design of observer-based non-fragile load frequency control for power systems with electric vehicles[J]. ISA Transactions,2019,91. [24]Augusto Matheus dos Santos Alonso,Danilo IglesiasBrandao,Tommaso Caldognetto,Fernando Pinhabel Maraf?o,Paolo Mattavelli. A selective harmonic compensation and power control approach exploiting distributed electronic converters inmicrogrids[J]. International Journal of Electrical Power and Energy Systems,2020,115. [25]Hay Wong,Derek Neary,Eric Jones,Peter Fox,Chris Sutcliffe. Benchmarking spatial resolution in electronic imaging for potential in-situ Electron Beam Melting monitoring[J]. Additive Manufacturing,2019,29. [26]Yunfei Bai,Hongwen He,Jianwei Li,Shuangqi Li,Ya-xiong Wang,Qingqing Yang. Battery anti-aging control for a plug-in hybrid electric vehicle with a hierarchical optimization energy management strategy[J]. Journal of Cleaner Production,2019,237. [27]N. Samartin-Veiga,A.J. González-Villar,M.T. Carrillo-de-la-Pe?a. Neural correlates of cognitive dysfunction in fibromyalgia patients: Reduced brain electrical activity during the execution ofa cognitive control task[J]. NeuroImage: Clinical,2019,23. [28]Masato Nakaya,Shinta Watanabe,Jun Onoe. Control of electric, optical, thermal properties of C 60 films by electron-beam irradiation[J]. Carbon,2019,152. [29]R. Saadi,M.Y. Hammoudi,O. Kraa,M.Y. Ayad,M. Bahri. A robust control of a 4-leg floating interleaved boost converter for fuel cell electric vehicle application[J]. Mathematics and Computers in Simulation,2019. [30]Frederik Banis,Daniela Guericke,Henrik Madsen,Niels Kj?lstad Poulsen. Supporting power balance in Microgrids with Uncertain Production using Electric Vehicles and Indirect Control ? ? This work has been supported by ENERGINET.DK under the project microgrid positioning - uGrip and the CITIES project.[J]. IFAC PapersOnLine,2019,52(4). 电气控制英文参考文献二: [31]Huijuan Luo,Jinpeng Yu,Chong Lin,Zhanjie Liu,Lin Zhao,Yumei Ma. Finite-time dynamic surface control for induction motors with input saturation in electric vehicle drive systems[J]. Neurocomputing,2019. [32]Peter K. Joseph,D. Elangovan,G. Arunkumar. Linear control of wireless charging for electric bicycles[J]. Applied Energy,2019,255. [33]Yu Congyang,Zhu Dequan,Wang Chaoxian,Zhu Lin,Chu Tingting,Jen Tien-Chien,Liao Juan. Optimizing Electric Adjustment Mechanism Using the Combination of Multi-body Dynamics and Control[J]. Procedia Manufacturing,2019,35. [34]Hussein Termous,Xavier Moreau,Clovis Francis,Hassan Shraim. Effect of fractional order damping control on braking performancefor electric vehicles ? ? This work was supported by the Lebanese research program and the AUF-CNRSL-UL program.[J]. IFAC PapersOnLine,2019,52(5). [35]Manuel Schwartz,Florian Siebenrock,S?ren Hohmann. Model Predictive Control Allocation of an Over-actuated Electric Vehicle with Single Wheel Actuators[J]. IFAC PapersOnLine,2019,52(8). [36]Di Wu,Nikitha Radhakrishnan,Sen Huang. A hierarchical charging control of plug-in electric vehicles with simpleflexibility model[J]. Applied Energy,2019,253. [37]Abhishek Nayak,Rubi Rana,Sukumar Mishra. Frequency Regulation by Electric Vehicle during Grid Restoration using Adaptive Optimal Control[J]. IFAC PapersOnLine,2019,52(4). [38]Nicolò Robuschi,Mauro Salazar,Pol Duhr,FrancescoBraghin,Christopher H. Onder. Minimum-fuel Engine On/Off Control for the Energy Management of a Hybrid Electric Vehicle via Iterative Linear Programming ? ? We thank Ferrari S.p.A. for supporting this project.[J]. IFAC PapersOnLine,2019,52(5). [39]Anas A. Ahmed,M.R. Hashim,Marzaini Rashid. Control of the structural, electrical and optical properties of spin coated NiO films by varying precursor molarity[J]. Thin Solid Films,2019,690. [40]Wilco van Harselaar,Niels Schreuders,Theo Hofman,Stephan Rinderknecht. Improved Implementation of Dynamic Programming on the Example of Hybrid Electric Vehicle Control[J]. IFACPapersOnLine,2019,52(5). [41]Jose A. Matute,Mauricio Marcano,Sergio Diaz,Joshue Perez. Experimental Validation of a Kinematic Bicycle Model Predictive Control with Lateral Acceleration Consideration ? ? This project has received funding from the Electronic Component Systems for European Leadership Joint Undertaking under grant agreement No 737469 (AutoDrive Project). This Joint Undertaking receives support fromthe European Union Horizon 2020 research and innovation programmeand Germany, Austria, Spain, Italy, Latvia, Belgium, Netherlands, Sweden, Finland, Lithuania, Czech Republic, Romania,[J]. IFAC PapersOnLine,2019,52(8). [42]Vladislav S. Gromov,Oleg I. Borisov,Sergey S. Shavetov,AntonA. Pyrkin,FatimatB. Karashaeva. Modeling and Control of Robotic Systems Course: from Fundamentals to Applications ? ? The work was written with the support of the Ministry of Science and Higher Education of the Russian Federation, project unique identifier RFMEFI57818X0271 “Adaptive Sensorless Control for Synchronous Electric Drives in Intelligent Robotics and Transport Systems”.[J]. IFAC PapersOnLine,2019,52(9). [43]H. Mbarak,A.K. Kodeary,S.M. Hamidi,E. Mohajarani,Y. Zaatar. Control of nonlinear refractive index of AuNPs doped with nematic liquid crystal under external electric field[J]. Optik,2019,198. [44]Yanzhao Jia,Rabee Jibrin,Yutaro Itoh,Daniel G?rges. Energy-Optimal Adaptive Cruise Control for Electric Vehicles in Both Time and Space Domain based on Model Predictive Control[J]. IFAC PapersOnLine,2019,52(5). [45]Lukas Engbroks,Daniel G?rke,Stefan Schmiedler,TobiasG?decke,Bastian Beyfuss,Bernhard Geringer. Combined energy and thermal management for plug-in hybrid electric vehicles -analyses based on optimal control theory ? ? This work has been performed within the Daimler AG in Stuttgart, Germany in cooperation with the Institute for Powertrains and Automotive Technology at Vienna University of Technology, Austria.[J]. IFAC PapersOnLine,2019,52(5). [46]Jean Kuchly,Dominique Nelson-Gruel,Alain Charlet,Yann Chamaillard,Cédric Nouillant. Projected Gradient and ModelPredictive Control : Optimal Energy and Pollutants Management for Hybrid Electric Vehicle[J]. IFAC PapersOnLine,2019,52(5). [47]Pier Giuseppe Anselma,Yi Huo,Joel Roeleveld,Giovanni Belingardi,Ali Emadi. From Off-line to On-line Control of a Multimode Power Split Hybrid Electric Vehicle Powertrain[J]. IFAC PapersOnLine,2019,52(5). [48]Xiaoyong Zhu,Deyang Fan,Zixuan Xiang,Li Quan,Wei Hua,Ming Cheng. Systematic multi-level optimization design and dynamiccontrol of less-rare-earth hybrid permanent magnet motor for all-climatic electric vehicles[J]. Applied Energy,2019,253. [49]. Engineering - Industrial Engineering; Findings from Southwest Jiaotong University Provides New Data about Industrial Engineering (Optimal Energy Management and Control In Multimode Equivalent Energy Consumption of Fuel Cell/supercapacitor of Hybrid Electric Tram)[J]. Energy Weekly News,2019. [50]. SK Planet Co. Ltd.; Patent Issued for Electronic Stamp System For Security Intensification, Control Method Thereof, And Non-Transitory Computer Readable Storage Medium Having ComputerProgram Recorded Thereon (USPTO 10,361,857)[J]. Computers, Networks & Communications,2019. [51]. Energy - Electric Power; Study Data from National Institute of Technology Calicut Update Understanding of Electric Power (Modified switching scheme-based explicit torque control of brush-less direct current motor drive)[J]. Energy Weekly News,2019. [52]. Energy; Findings from School of Mechanical Engineering Reveals New Findings on Energy (Deep Reinforcement Learning of Energy Management With Continuous Control Strategy and Traffic Information for a Series-parallel Plug-in Hybrid Electric Bus)[J]. Energy Weekly News,2019. [53]. Energy - Electric Power; Reports Outline Electric Power Study Results from Dalian Maritime University (Direct VoltageControl of Stand-alone Dfig Under Asymmetric Loads Based On Non-singular Terminal Sliding Mode Control and Improved Extended State Observer)[J]. Energy Weekly News,2019. [54]. Energy - Electric Power; Studies from Xi'an Jiao Tong University Add New Findings in the Area of Electric Power (A model predictive control approach for matching uncertain wind generation with PEV charging demand in a microgrid)[J]. Energy WeeklyNews,2019. [55]. Energy - Electric Power; Researchers from Northwestern Polytechnical University Discuss Findings in Electric Power (Decoupling Start Control Method for Aircraft Wound-rotor Synchronous Starter-generator Based On Main Field Current Estimation)[J]. Energy Weekly News,2019. [56]. Energy - Electric Power; Wuhan University Reports Findings in Electric Power (Adjustable virtual inertia control of supercapacitors in PV-based AC microgrid cluster)[J]. Energy Weekly News,2019. [57]. Lg Electronic Inc.; Researchers Submit Patent Application, "Method And Apparatus For Monitoring Control Channel In Unlicensed Band", for Approval (USPTO 20190229825)[J]. Computers, Networks & Communications,2019. [58]. Special Conditions: Pilatus Aircraft Ltd., Model PC-12/47E Airplanes; Electronic Engine Control System Installation[J]. The Federal Register / FIND,2019,84(158). [59]. Apple Inc.; Patent Issued for Offset Control For Assembling An Electronic Device Housing (USPTO 10,368,457)[J]. Computers, Networks & Communications,2019. [60]. Mitsubishi Electric Corporation; Researchers Submit Patent Application, "Synchronization Control System And Control Device",for Approval (USPTO 20190238071)[J]. Computers, Networks & Communications,2019. 电气控制英文参考文献三: [61]. Technology - Cybernetics; Findings from North ChinaElectric Power University Provides New Data about Cybernetics (Hierarchical Distributed Model Predictive Control of Standalone Wind/solar/battery Power System)[J]. Energy Weekly News,2019. [62]. Nidec Corporation; "Motor Control System And Electric Power Steering System" in Patent Application Approval Process (USPTO 20190233002)[J]. Energy Weekly News,2019. [63]. Mobvoi Information Technology Co. LTD.; Researchers Submit Patent Application, "Display Device, Electronic Device And Display Control Method For Screen", for Approval (USPTO 20190235540)[J]. Computers, Networks & Communications,2019. [64]. Engineering - Power Delivery; Studies from North China Electric Power University Have Provided New Data on Power Delivery (Fault Tripping Criteria In Stability Control Device Adapting ToHalf-wavelength Ac Transmission Line)[J]. Energy Weekly News,2019. [65]. Samsung Electronics Co. Ltd.; "Electronic Device For Sensing Biometric Information And Control Method Thereof" in Patent Application Approval Process (USPTO 20190231235)[J]. Medical Patent Business Week,2019. [66]Asiabar Aria Noori,Kazemi Reza. A direct yaw momentcontroller for a four in-wheel motor drive electric vehicle using adaptive sliding mode control[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(3). [67]. Energy - Electrical Energy Systems; New Electrical Energy Systems Findings Has Been Reported by Investigators at University of Sfax (Constrained design and control of trapezoidal waves-forms hybrid excitation synchronous motor increasing energy accumulator lifetime)[J]. Energy Weekly News,2019. [68]. Energy; Findings from School of Mechanical Engineering Has Provided New Data on Energy (Considering Well-to-Wheels Analysis in Control Design: Regenerative Suspension Helps to Reduce Greenhouse Gas Emissions from Battery Electric Vehicles)[J]. Energy Weekly News,2019. [69]. Mitsubishi Electric Corporation; Patent Application Titled "Electric-Power Control Device, Electric Motor, Air-Conditioning Apparatus, And Method For Manufacturing Electric Motor" Published Online (USPTO 20190242594)[J]. Energy Weekly News,2019. [70]. Energy; Reports Summarize Energy Study Results from Warsaw University of Technology (Model Predictive Control and energy optimisation in residential building with electric underfloorheating system)[J]. Energy Weekly News,2019. [71]. Energy - Nuclear Power; Researchers from Korea Electric Power Corporation Report New Studies and Findings in the Area of Nuclear Power (Development of Anti-windup Pi Control and Bumpless Control Transfer Methodology for Feedwater Control System)[J]. Energy Weekly News,2019. [72]. Energy - Electric Power; Data on Electric Power Discussed by Researchers at School of Electrical and Electronics Engineering (Analysis of the Performance Characteristics and Arm Current Control for Modular Multilevel Converter With Asymmetric Arm Parameters)[J]. Energy Weekly News,2019. [73]. Energy - Electric Power; Study Findings on Electric Power Are Outlined in Reports from University of Technology (Direct power control for VSC-HVDC systems: An application of the global tracking passivity-based PI approach)[J]. Energy Weekly News,2019. [74]Allous Manel,Mrabet Kais,Zanzouri Nadia. Fast fault-tolerant control of electric power steering systems in the presence of actuator fault[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(12). [75]. Energy - Electric Power; Researchers from College of Engineering Detail New Studies and Findings in the Area of Electric Power (Power Control Strategy of Photovoltaic Plants for Frequency Regulation In a Hybrid Power System)[J]. Energy Weekly News,2019. [76]. Energy - Electric Power; Researchers at Shiv Nadar University Report New Data on Electric Power (Methods for overcoming misalignment effects and charging control of a dynamic wireless electric vehicle charging system)[J]. Energy Weekly News,2019. [77]Zhang Bing,Zong Changfu,Chen Guoying,Li Guiyuan. An adaptive-prediction-horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(12). [78]Ren Yue,Zheng Ling,Yang Wei,Li Yinong. Potential field–based hierarchical adaptive cruise control for semi-autonomous electric vehicle[J]. Proceedings of the Institution of MechanicalEngineers,2019,233(10). [79]. Energy - Electric Power; Data from University of the Basque Country Advance Knowledge in Electric Power (Sliding Mode Control of an Active Power Filter With Photovoltaic Maximum Power Tracking)[J]. Energy Weekly News,2019. [80]Izadbakhsh Alireza,Kheirkhahan Payam. Adaptive fractional-order control of electrical flexible-joint robots: Theory and experiment[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(9). [81]Yang Weiwei,Liang Jiejunyi,Yang Jue,Zhang Nong. Optimal control of a novel uninterrupted multi-speed transmission for hybrid electric mining trucks[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(12). [82]Guercioni Guido Ricardo,Vigliani Alessandro. Gearshiftcontrol strategies for hybrid electric vehicles: A comparison of powertrains equipped with automated manual transmissions and dual-clutch transmissions[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(11). [83]. Energy - Electric Power; Findings from PontificalUniversity Provides New Data on Electric Power (A Communication-free Reactive-power Control Strategy In Vsc-hvdc Multi-terminal Systems To Improve Transient Stability)[J]. Energy Weekly News,2019. [84]. Energy - Electric Power; Findings from Yazd University in the Area of Electric Power Reported (An adaptive time-graded control method for VSC-MTDC networks)[J]. Energy Weekly News,2019. [85]Liu Hui,Li Xunming,Wang Weida,Han Lijin,Xin Huibin,Xiang Changle. Adaptive equivalent consumption minimisation strategy and dynamic control allocation-based optimal power management strategy for four-wheel drive hybrid electric vehicles[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(12). [86]. Networks - Neural Networks; Findings on Neural Networks Reported by Investigators at School of Electrical Engineering and Automation (Stability Analysis of Fractional Order Hopfield Neural Networks With Optimal Discontinuous Control)[J]. Computers, Networks & Communications,2019. [87]. Energy - Electric Power; Researchers from NanjingUniversity of Aeronautics and Astronautics Describe Findings in Electric Power (Synchronous Vibration Control for a Class of Cross-coupled Antisymmetric Msr Systems)[J]. Energy Weekly News,2019. [88]. Energy - Electric Power; Investigators at Chung Ang University Detail Findings in Electric Power (Flexible Risk Control Strategy Based On Multi-stage Corrective Action With Energy Storage System)[J]. Energy Weekly News,2019. [89]. Energy - Electric Power; Findings in Electric Power Reported from National Institute of Technology (An adaptive PI control scheme to balance the neutral-point voltage in a solar PV fed grid connected neutral point clamped inverter)[J]. Energy Weekly News,2019. [90]Najjari Behrouz,Mirzaei Mehdi,Tahouni Amin. Constrained stability control with optimal power management strategy for in-wheel electric vehicles[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(4). 电气控制英文参考文献四: [91]. Energy - Wind Farms; Investigators at School of Electrical Power Detail Findings in Wind Farms (Theoretical Study On Control Strategy of Grid-connected High Voltage Ride Through In Doubly-fed Wind Farm)[J]. Energy Weekly News,2019. [92]. Kia Motors Corporation; Patent Issued for Wireless Charging Control Apparatus And Method For Optimal Charging By Adjusting The Inclination Of The Electric Vehicle Being Charged (USPTO10,399,449)[J]. Computers, Networks & Communications,2019. [93]. Energy; New Data from Institute of Electrical Engineering Illuminate Findings in Energy (Charging-Discharging Control Strategy for a Flywheel Array Energy Storage System Based on the Equal Incremental Principle)[J]. Energy Weekly News,2019. [94]. Science - Applied Sciences; Findings from North China Electric Power University Broaden Understanding of Applied Sciences (Coordinated Frequency Control Strategy with the Virtual Battery Model of Inverter Air Conditionings)[J]. Science Letter,2019. [95]. Science - Materials Science; Studies from Tsinghua University in the Area of Materials Science Described (ElectricField Control of Neel Spin-orbit Torque In an Antiferromagnet)[J]. Science Letter,2019. [96]. Electronics - Power Electronics; Studies from Nanjing University of Aeronautics and Astronautics Have Provided New Data on Power Electronics (Wireless battery charging control for electric vehicles: a user-involved approach)[J]. Computers, Networks & Communications,2019. [97]Kivanc,Ustun. Dynamic control of electronic differential in the field weakening region[J]. International Journal ofElectronics,2019,106(10). [98]Mohit Batra,John McPhee,Nasser L. Azad. Real-time model predictive control of connected electric vehicles[J]. Vehicle System Dynamics,2019,57(11). [99]Kim Daihyun,Echelmeier Austin,Cruz Villarreal Jorvani,Gandhi Sahir,Quintana Sebastian,Egatz-Gomez Ana,Ros Alexandra. Electric Triggering for Enhanced Control of Droplet Generation.[J].Analytical chemistry,2019,91(15). [100]Kurien Caneon,Srivastava Ajay Kumar. Impact of Electric Vehicles on Indirect Carbon Emissions and Role of Engine Post-Treatment Emission Control Strategies.[J]. Integrated environmental assessment and management,2019. [101]Aravindh D,Sakthivel R,Kaviarasan B,Anthoni SMarshal,Alzahrani Faris. Design of observer-based non-fragile loadfrequency control for power systems with electric vehicles.[J]. ISA transactions,2019,91. [102]Chen Xianzhe,Zhou Xiaofeng,Cheng Ran,Song Cheng,Zhang Jia,Wu Yichuan,Ba You,Li Haobo,Sun Yiming,You Yunfeng,Zhao Yonggang,Pan Feng. Electric field control of Néel spin-orbit torque in an antiferromagnet.[J]. Nature materials,2019,18(9). [103]Lê-Scherban Félice,Ballester Lance,Castro Juan C,Cohen Suzanne,Melly Steven,Moore Kari,Buehler James W. Identifying neighborhood characteristics associated with diabetes and hypertension control in an urban African-American population using geo-linked electronic health records.[J]. Preventive medicine reports,2019,15. [104]Samartin-Veiga N,González-Villar A J,Carrillo-de-la-Pe?a M T. Neural correlates of cognitive dysfunction in fibromyalgia patients: Reduced brain electrical activity during the execution of a cognitive control task.[J]. NeuroImage. Clinical,2019,23. [105]Leibel Sydney,Weber Rachel. Utilizing a PhysicianNotification System in the EPIC Electronic Medical Record to Improve Pediatric Asthma Control: A Quality Improvement Project.[J].Clinical pediatrics,2019,58(11-12). [106]Bernacka-Wojcik Iwona,Huerta Miriam,Tybrandt Klas,Karady Michal,Mulla Mohammad Yusuf,Poxson David J,Gabrielsson Erik O,Ljung Karin,Simon Daniel T,Berggren Magnus,Stavrinidou Eleni. Implantable Organic Electronic Ion Pump Enables ABA Hormone Delivery for Control of Stomata in an Intact Tobacco Plant.[J]. Small (Weinheim an der Bergstrasse, Germany),2019. [107]Stoynova Nevena,Laske Christoph,Plewnia Christian. Combining electrical stimulation and cognitive control training to reduce concerns about subjective cognitive decline.[J]. Brainstimulation,2019,12(4). [108]Bettano Amy,Land Thomas,Byrd Alice,Svencer Susan,Nasuti Laura. Using Electronic Referrals to Address Health Disparities and Improve Blood Pressure Control.[J]. Preventing chronicdisease,2019,16. [109]Xu Meng,Yan Jian-Min,Guo Lei,Wang Hui,Xu Zhi-Xue,Yan Ming-Yuan,Lu Yun-Long,Gao Guan-Yin,Li Xiao-Guang,Luo Hao-Su,ChaiYang,Zheng Ren-Kui. Nonvolatile Control of the Electronic Properties of In<sub>2- x </sub>Cr<sub> x </sub>O<sub>3</sub> Semiconductor Films by Ferroelectric Polarization Charge.[J]. ACS appliedmaterials & interfaces,2019,11(35). [110]Gao Tao,Mirzadeh Mohammad,Bai Peng,Conforti Kameron M,Bazant Martin Z. Active control of viscous fingering using electricfields.[J]. Nature communications,2019,10(1). [111]Chaux Robin,Treussier Isabelle,Audeh Bissan,Pereira Suzanne,Hengoat Thierry,Paviot Béatrice Trombert,Bousquet Cedric. Automated Control of Codes Accuracy in Case-Mix Databases by Evaluating Coherence with Available Information in the Electronic Health Record.[J]. Studies in health technology andinformatics,2019,264. [112]Bolat Mustafa Suat,Cinar Onder,Asci Ramazan,Buyukalpelli Recep. A novel method for pain control: infiltration free local anesthesia technique (INFLATE) for transrectal prostatic biopsy using transcutaneous electrical nerve stimulation (TENS).[J]. International urology and nephrology,2019. [113]Cruz Chad D,Yuan Jennifer,Climent Clàudia,Tierce NathanT,Christensen Peter R,Chronister Eric L,Casanova David,Wolf Michael O,Bardeen Christopher J. Using sulfur bridge oxidation to control electronic coupling and photochemistry in covalent anthracene dimers.[J]. Chemical science,2019,10(32). [114]Zhou Canliang,Sun Linfeng,Zhang Fengquan,Gu Chenjie,Zeng Shuwen,Jiang Tao,Shen Xiang,Ang Diing Shenp,Zhou Jun. Electrical Tuning of the SERS Enhancement by Precise Defect DensityControl.[J]. ACS applied materials & interfaces,2019,11(37). [115]Taeho Park,Hyeongcheol Lee. Optimal Supervisory Control Strategy for a Transmission-Mounted Electric Drive Hybrid Electric Vehicle[J]. International Journal of AutomotiveTechnology,2019,20(4). [116]Zoé Magalh?es,André Murilo,Renato V. Lopes. Development and evaluation with MIL and HIL simulations of a LQR-based upper-level electronic stability control[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering,2019,41(8). [117]Justin Roger Mboupda Pone,Victor Kamdoum Tamba,Guillaume Honore Kom,Mathieu Jean Pierre Pesdjock,Alain Tiedeu,Martin Kom. Numerical, electronic simulations and experimental analysis of a no-equilibrium point chaotic circuit with offset boosting and partial amplitude control[J]. SN Applied Sciences,2019,1(8). [118]Alberto Cavallo,Antonio Russo,Giacomo Canciello.Hierarchical control for generator and battery in the more electric aircraft[J]. Science China Information Sciences,2019,62(9). [119]Ying Liu,Kai Cao,Jingjun Liu,Zhengping Zhang,Jing Ji,Feng Wang,Zhilin Li. Electrodeposition of copper-doped SnS thin films and their electric transmission properties control for thermoelectric enhancement[J]. Journal of Materials Science: Materials in Electronics,2019,30(17). [120]Feng Tian,Liqi Sui,Yuanfan Zeng,Bo Li,Xingyue Zhou,Lijun Wang,Hongxu Chen. Hardware Design and Test of a Gear-ShiftingControl System of a Multi-gear Transmission for ElectricVehicles[J]. Automotive Innovation,2019,2(3).。
第13卷㊀第8期Vol.13No.8㊀㊀智㊀能㊀计㊀算㊀机㊀与㊀应㊀用IntelligentComputerandApplications㊀㊀2023年8月㊀Aug.2023㊀㊀㊀㊀㊀㊀文章编号:2095-2163(2023)08-0107-07中图分类号:TP391文献标志码:A一种基于交叉注意力机制多模态遥感图像匹配网络石添鑫,曹帆之,韩开杨,邓新蒲,汪㊀璞(国防科技大学电子科学学院,长沙410073)摘㊀要:多模态遥感图像之间复杂的非线性辐射失真和几何形变,给图像匹配带来了巨大的挑战㊂由于传统方法普遍采用人工设计的特征描述子,难以表达更深层次和更抽象的特征,在差异较大的图像间匹配结果较差㊂而现有的深度学习描述符不适合直接用于多模态遥感图像配准且普遍存在正确特征点提取较少,配准不稳定的问题㊂针对上述问题,本文提出一种基于交叉注意力机制的多模态遥感图像匹配网络㊂该网络利用相位一致抑制遥感图像之间的巨大差异,同时通过交叉注意力机制学习多模态图像匹配的描述符在小容量数据集上实现了神经网络的泛化训练㊂实验结果表明,所提算法在公开多模态遥感数据集上性能优异,且在其他领域的多模态数据上仍然有效㊂关键词:相位一致性;多模态;交叉注意力机制Amultimodalremotesensingimagematchingnetworkbasedoncross-attentionmechanismSHITianxin,CAOFanzhi,HANKaiyang,DENGXinpu,WANGPu(CollegeofElectronicScienceandTechnology,NationalUniversityofDefenseTechnology,Changsha410073,China)ʌAbstractɔComplexnon-linearradiometricdistortionsandgeometricdeformationsbetweenmultimodalremotesensingimagesposeasignificantchallengetoimagematching.Astraditionalmethodsgenerallyusemanuallydesignedfeaturedescriptors,itisdifficulttoexpressdeeperandmoreabstractfeatures,andthematchingresultsbetweenimageswithlargedifferencesarepoor.Theexistingdeeplearningdescriptorsarenotsuitablefordirectuseinmultimodalremotesensingimagealignmentandgenerallysufferfromlowextractionofcorrectfeaturepointsandunstablealignment.Toaddresstheproblems,thepaperproposesamultimodalremotesensingimagematchingnetworkbasedoncross-attentionmechanism.Afterthat,theresearchtakesadvantageofphasecoherencetoobtainmorestablefeaturepoints,andthemulti-modalimagematchingdescriptorislearnedbythecross-attentionmechanismtorealizethegeneralizationtrainingofneuralnetworksonsmalldatasets.Experimentalresultsshowthattheproposedalgorithmperformswellonpubliclyavailablemulti-modaldatasetsandremainseffectiveonotherdomains.ʌKeywordsɔphaseconsistency;multi-modal;cross-attentionmechanism作者简介:石添鑫(1997-),女,硕士研究生,主要研究方向:图像匹配;曹帆之(1992-),男,博士研究生,主要研究方向:图像匹配;韩开杨(1999-),男,硕士研究生,主要研究方向:图像匹配;邓新蒲(1966-),男,博士,副教授,主要研究方向:视线确定;汪㊀璞(1986-),男,博士,讲师,主要研究方向:视线确定㊂通讯作者:汪㊀璞㊀㊀Email:wp421189@nudt.edu.cn收稿日期:2022-09-110㊀引㊀言近年来,多模态遥感图像匹配引起了广泛关注㊂该研究目的是在2张或多张由不同的传感器㊁不同的视角或不同的时间获得的图像中识别同名点㊂由于不同传感器成像机制㊁成像条件不同,多模态图像之间存在明显的非线性辐射失真(NRD)和几何畸变㊂因此多模态图像之间精确匹配仍然是一个具有挑战性的问题㊂最近研究表明,图像的结构和形状特性在不同的模态之间得以保留㊂Ye等学者[1]通过捕获了图像之间的形状相似性,提出了一种新的图像匹配相似度度量(DLSC),且与图像间强度无关㊂虽然该研究方法在处理图像间非线性强度差异效果较好,但如果图像包含很少的形状或轮廓信息,则DLSC的性能可能会下降㊂基于此,Ye等学者[2]又提出一种快速鲁棒的传统匹配框架,在所提框架中,图像的结构和形状属性由像素级特征表示,并将定向相位一致性直方图作为特征描述子,且获得了良好的结果㊂但该框架无法处理具有较大旋转和比例差异的图像㊂Li等学者[3]发现相位一致性图(PC)具有很好的辐射鲁棒性,并构建最大索引图来削弱多模态图像的NRD差异,提出了一种具有旋转不变性且对辐射变化不敏感的特征变换方法(RIFT)㊂但是RIFT方法不支持图像的尺度差异㊂Xie等学者[4]提出了基于logGabor滤波的扩展相位相关算法(LGEPC),更好地解决了NRD以及大尺度差异和旋转变换问题,但该方法配准精度不太令人满意㊂这些传统方法均是人工制作的描述子,而这些描述子通常来自图像的外观信息,如颜色㊁纹理和梯度,难以表达更深层次和更抽象的特征㊂此外,人工特征描述符的系数和最佳的参数需要大量的手动调整㊂因此深度学习的方法渐渐受到人们的关注㊂在图像匹配的领域,基于深度学习的算法吸引了许多关注[5-7]㊂但是在多模态遥感图像匹配中,深度学习的方法并没有表现出极大的优势㊂一方面,因为将图像匹配的任务重新设计为可区分的端到端过程是具有挑战的㊂另一方面,正如文献[8]中所述,当前用于训练的本地多模态数据集还不够多样化,无法学习高质量且广泛适用的描述符㊂目前该领域只有少量深度学习方法是针对多模态设计的,大多仅适用于某一种类型的跨模态,例如可见光与SAR图像匹配㊁红外与可见光图像匹配等㊂且现有的多模态匹配深度方法SFcNet[9]㊁CNet[10]普遍存在提取正确特征点个数较少的问题㊂针对上述问题,本文提出一种基于交叉注意力机制的多模态遥感图像匹配网络(PCM)㊂具体来说,利用相位一致性具有良好辐射鲁棒性,首先构建多模态图像的相位一致图(PC图),然后利用Fast算法在PC图上来获得更多㊁更稳定的特征点,接着通过交叉注意力机制学习多模态图像的共有特征,得到特征点的描述子㊂最后,计算描述子之间的余弦距离,选取距离最短的点作为匹配点㊂实验表明该算法在公开多模态遥感数据集上性能优异,且在其他领域的多模态数据上仍然有效㊂1㊀背景知识1.1㊀注意力机制在2017年,Google团队在论文‘Attentionisallyouneed“[11]中提出了一个自我注意的结构㊂这引起了巨大的反响,使注意机制成为最近研究的重要主题,该研究在各种NLP任务中取得了成功,同时在视觉领域也开始尝试把自我注意的结构应用于各类任务中,如语义分割㊁图像分类㊁人类姿势估计等㊂注意机制旨在自动探索有意义的功能,以增强其表示能力并提高最终性能㊂自注意力机制的计算方式如下:Attention(Q,K,V)=softmaxQKTdkæèçöø÷V(1)Q=WQX(2)K=WKX(3)V=WVX(4)㊀㊀其中,X表示输入的数据,Q,K,V的值都是通过X和超参W相乘得到的㊂这里,Q可理解为查询的变量,K为索引的变量,V为内容的变量㊂1.2㊀相位一致性相位一致性(phasecongruency,PC)是将图像傅立叶分量中相位一致的点的集合㊂这是一个无量纲的量,其取值范围被标准化为0 1,因此受图像亮度或对比度变化的影响较小㊂最早关注到图像相位信息是Oppenheim等学者[12],研究中发现在信号的傅立叶表示中,在某些情况下如果仅保留相位,信号的许多重要特征就会得到保留㊂随后,Morrone和Owens[13]发现能量函数的极大值出现在相位一致的点上,因此提出了一种利用构造局部能量函数来检测和定位特征点算法㊂Kovesi[14]对该方法做出了改进,克服了噪声等问题,使该方法的应用得以保证㊂目前,相位一致图已经广泛应用于图像边缘检测中㊂1.3㊀构建相位一致图本文利用相位一致性构建多模态图像的相位一致图(PC图),如图1所示㊂具体来说,本文使用Log-Gabor小波在多个尺度和方向上计算,计算公式见式(5):PC(x,y)=ðoðsWo(x,y)Aso(x,y)ΔΦso(x,y)-TðoðsAso(x,y)+ε(5)其中,PC(x,y)表示相位一致性的大小;Wo是频率分布的权重因子;Aso(x,y)为在小波尺度s和方向o上的(x,y)处的振幅;ε是一个很小值,为了防止分母为零;⌊.」运算符防止结果为负值,即封闭的值为正值时结果等于其本身,否则为零㊂ΔΦso(x,y)是一个敏感的相位偏差函数,定义为:Aso(x,y)ΔΦso(x,y)=(eso(x,y)ϕ-e(x,y)+㊀㊀㊀rso(x,y)ϕ-d(x,y))-|(eso(x,y)ϕ-d(x,y)-㊀㊀㊀rso(x,y)ϕ-e(x,y))(6)㊀ϕ-e(x,y)=ðsðoeso(x,y)/E(x,y)(7)801智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀㊀ϕ-d(x,y)=ðsðorso(x,y)/E(x,y)(8)其中,eso(x,y),rso(x,y)是将图像与偶对称小波和奇对称Log-Gabor小波分别进行卷积,得到在尺度s和方向o上的响应㊂E(x,y)是一个局部能量函数,函数中的2部分通过信号和一对正交滤波器进行卷积来得到,即:E(x,y)=ðsðoeso(x,y)()2+ðsðorso(x,y)()2(9)01002003004005000200400o r i g i nP C010020030040050002004000100200300400500200400o r i g i nP C0100200300400500200400图1㊀利用相位一致性构建多模态图像PC图Fig.1㊀ConstructionofmultimodalimagePCmapsusingphasecoherence2㊀模型构建在本节中,阐述了所提出的多模态遥感图像匹配方法㊂算法流程如图2所示㊂由图2可看到,本文算法主要由3个阶段组成,包括:特征点检测㊁特征描述符获取和特征点匹配㊂2.1㊀特征点检测在图像匹配的过程中,如何提取重复率高㊁分布均匀㊁且稳定的特征点也是近来的研究热点㊂在多模态图像匹配中由于存在较大的非线性辐射畸变,在自然图像上表现较好的特征点检测方法并不能完全适用㊂因此,本文利用相位一致性具有辐射鲁棒性,考虑构建多模态图像的PC图㊂通过构建的PC图,多模态图像之间共有的结构特性被保留下来㊂接着在PC图上进行特征点检测,具体来说,通过1.3节中式(5)获得图像的相位一致图,接着利用Fast特征提取算法在PC图上提取一定数量的特征点㊂在PC图上利用Fast算法提取特征点如图3所示㊂需要说明的是,在训练阶段本文选取了利用上述方法提取的特征点中,均匀分布的30个特征点进行训练㊂输出匹配结果计算描述符之间的余弦距离,相似度最大的为对应点利用注意力机制网络获得特征点的描述符感知图像参考图像相位一致性相位一致性F as t 提取特征点F a s t 提取特征点P C 图P C 图图2㊀本文算法流程图Fig.2㊀Flowchartofthealgorithminthispaper图3㊀在PC图上利用Fast算法提取特征点Fig.3㊀ExtractionoffeaturepointsonPCgraphusingFastalgorithm2.2㊀特征描述符获取通过第一步得到特征点位置后,还要知道特征点的描述符,考虑采用人工设计的特征描述子,难以表达更深层次和更抽象的特征㊂并且人工特征描述符的系数和最佳参数需要大量的手动调整㊂因此本文利用深度学习的方法获得具有更好特征表达能力的描述子㊂本文算法提出一种基于交叉注意力机制的卷积神经网络㊂由于注意力机制是一种搜索全局特征的结构,需要的计算量和内存都较大,为了减少计算量和内存,考虑首先学习半稠密的描述符㊂具体网络结构如图4所示㊂首先,参考图像与感知图像经过一个卷积核大小为11ˑ11的大尺度卷积,提取浅层特征,此时特征维数为64,接着经过3层VGG-Basicblock提取深度特征,每层网络包含2个卷积层㊁2个BN层㊁1个dropout层,特征维数扩展为128㊂然后,再经过1个卷积核大小为15ˑ15的901第8期石添鑫,等:一种基于交叉注意力机制多模态遥感图像匹配网络大尺度卷积,获得全局特征,最后通过1个dropout层,丢弃一些无用特征,这样就得到了大小为原图大小八分之一的特征图,特征通道为128维㊂但是由于图像之间差异较大,因此采用了互注意力机制,更好地学习彼此的共有的特征㊂通过上述步骤得到了半稠密描述符,此时的特征图尺寸为原图大小的八分之一㊂除此之外,还需要得到每个特征点对应的描述符,由于得到的特征图尺寸为原图大小的八分之一,无法利用特征点的位置直接在特征图上提取特征㊂因此,本文首先对原图上特征点的坐标进行归一化,接着根据输入特征图的尺度按比例恢复特征点坐标,见式(10):X,Y()=(xhH2,ywW2)(10)㊀㊀其中,(X,Y)为归一化后的特征点坐标;(x,y)为特征在原图的坐标位置;H,W分别为原图和特征图的长宽;h和w分别为特征图的长宽㊂但是这个新的坐标位置可能并非为整像素,此时要对其进行双线性插值补齐,然后其余特征通道按照同样的方式进行双线性插值㊂通过上述方法即得到了每个特征点对应的描述符㊂描述子计算描述子计算C r o s sA t t e n t i o nC r o s sA t t e n t i o nF a s tD r o p o u tD r o p o u tC o n v C o n vF a s tP CV G GB a s i c b l o c kV G GB a s i c b l o c kC o n v C o n vP C R e fS e nC o n vB NC o n vB NC o n vD r o p o u t(a )T h e p r o p o s e d o v e r a l l f r a m e w o r kA t t e n t i o n M a pQ KV(c 1)S e l f -A t t e n t i o n(c )C r o s s A t t e n t i o n S e l f -A t t e n t i o nS e l f -A t t e n t i o n F l a t t e nF l a t t e nV (S )K (S )Q (S )Q (R )K (R )V (R )(b )V G GB a s i c b l o c k S h a r e d w e i g h t s M u l t i p l i c a t i o nD o t p r o d u c t i o n S o f t m a xV :V a l u e K :K e yQ :Q u e r y图4㊀PCM网络结构图Fig.4㊀PCMnetworkstructure2.3㊀特征点匹配在训练阶段,本文采用有监督训练,每对图像的标签已知㊂首先,利用2.1节中介绍的特征点检测的方法获得参考图像上的特征点位置(xr,yr),然后利用图像标签计算得到感知图像上的对应点位置(xs,ys),具体见式(3):x(s,ys,1)=Hˑ(xr,yr,1)(11)㊀㊀其中,H为一个3ˑ3大小的矩阵,即为图像的标签㊂因此在特征匹配阶段,只需要计算考虑描述子间的损失函数,降低了训练的难度㊂本文损失函数参考SuperPoint[5]研究中给出的损失函数,将损失函数定义为合页损失(Hinge-Loss),具体计算公式为:LdD,Dᶄ,S()=1HcWc()2ðHc,Wch=1w=1ðHc,Wchᶄ=1wᶄ=1lddhw,dᶄhᶄwᶄ;shwhᶄwᶄ()(12)其中,㊀ldd,dᶄ;s()=λd∗s∗max0,mp-dTdᶄ()+1-s()∗max0,dTdᶄ-mn()(13)㊀㊀shwhᶄwᶄ=1㊀if ^HPhw-Phᶄwᶄ ɤ50㊀otherwise{(14)其中,λd为定义的权重;shwhᶄwᶄ判断对应点是否匹配;Phᶄwᶄ为双三次插值后特征点坐标;^HPhw是对Phᶄwᶄ做单应性变换H㊂dhw为预测点的描述子;dᶄhᶄwᶄ为真值点的描述子㊂当dhw和dᶄhᶄwᶄ越相似时,损失011智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀函数越小㊂在本文中,设置λd=250,mp=1,mn=0.2,λ=0.0001㊂3㊀实验与分析本节中,将本文所提方法与其它主流方法在匹配的性能㊁计算复杂度和推理时间等方面与进行比较㊂最后,在计算机视觉领域以及医学图像领域验证本算法的泛化性能㊂3.1㊀实验数据本文的训练集是从Landsat8卫星影像上获取的不同波段的图像,对地分辨率为30m㊂训练集包含1153对大小为256ˑ256的图像㊂测试数据集选用了Jiang等学者[15]提出的多模态图像匹配数据集㊂该数据集包括3个不同领域的多模态数据:计算机视觉领域㊁医学领域㊁遥感领域㊂本文的对比实验主要在其中的遥感数据上测试㊂同时,为了验证该算法的鲁棒性,在医学数据集中进行了泛化性能测试㊂实验设置在24GBNVIDIA3090上,并进行网络训练测试㊂3.2㊀实验设置实验的性能指标主要为匹配精度(ACC)㊁正确匹配点个数(NCM)㊁匹配运行时间(RT),其中匹配正确点是指预测匹配点与真实匹配点之间距离不超过5个像素的点,而匹配精度是指正确匹配点个数与算法总匹配点个数的百分比㊂对比实验选取了4种对比算法,分别为RIFT[3],HAPCG[16],3MRS[17],DFM[7],其中DFM为深度学习的方法,但是其在论文中介绍该方法无需进行训练㊂上述方法均在Jiang等学者[15]提出的多模态图像匹配数据集测试㊂为了更好地比较不同算法的性能,所有传统对比算法与本文算法均未使用误差点剔除模块,同时保证初始检测特征点数量相同,均设置为5000个㊂3.3㊀算法性能比较表1展示了本算法与现有传统算法与深度算法在匹配精度上的对比结果㊂可以看出,本算法在光学图像与SAR图像类型匹配中取得了最高的匹配精度,而同为深度学习方法的DFM算法在地图图像与光学图像上匹配精度最大,其余3种传统方法则是在红外与光学图像上有最好的匹配精度㊂本文算法在所有类型上均优于传统算法,但是在某些多模态类型下的精度并没有DFM算法高㊂不过通过具体的实验数据,5种方法在多模态图像匹配数据集的匹配精度对比如图5所示,可以发现DFM算法在某些图像上匹配结果很好,但是在一些难度较大的图像上匹配精度为0㊂因此通过表1和图5可以看出,本文算法不仅具有较好精度,同时也具有很好的稳定性㊂表1㊀5种方法在多模态数据集上的匹配精度(ACC)Tab.1㊀Matchingaccuracy(ACC)ofthefivemethodsonthemultimodaldataset%方法类型RIFTHAPCG3MRSDFMOURCrossSeason12.606.9313.0924.6625.67daynight20.165.2420.1140.0041.66DepthOptical30.486.1831.6861.7754.45InfraredOptical35.0513.4336.1120.8344.03MapOptical28.859.4731.4744.2934.68OpticalOptical34.047.9533.5880.2758.92SAROptical34.415.1533.7071.1672.22㊀㊀表2展示了本算法与现有传统算法及深度算法在匹配正确点个数上对比结果㊂从表2可以看出,不管哪种类型数据,在匹配正确点个数上本文算法均取得了最好的效果,同时在所有类型数据中,可见光与可见光匹配效果最好㊂㊀㊀5种算法在多模态数据集上的匹配时间对比结果见表3㊂从表3可以看出,不管哪种类型数据,本文算法运行速度较传统算法均提高了4 10倍,与深度方法对比也在大部分数据类型上都有更快的运行速度㊂表2㊀5种方法在多模态数据集上的匹配正确点个数(NCM)Tab.2㊀Numberofcorrectlymatchedpoints(NCM)ofthefivemethodsonthemultimodaldataset方法类型RIFTHAPCG3MRSDFMOURCrossSeason12820112518338daynight2671742591497DepthOptical39327148810831InfraredOptical3524713473412MapOptical3924034882328OpticalOptical469256446146919SAROptical39021135212480111第8期石添鑫,等:一种基于交叉注意力机制多模态遥感图像匹配网络表3㊀5种方法在多模态数据集上的匹配时间(RT)Tab.3㊀Matchingtimes(RT)ofthefivemethodsonthemultimodaldataset方法类型RIFTHAPCG3MRSDFMOURCrossSeason9.527.349.941.382.43daynight10.485.0010.171.301.22DepthOptical11.106.1212.791.581.49InfraredOptical7.234.636.791.521.27MapOptical11.656.2613.051.841.39OpticalOptical10.024.469.921.731.27SAROptical8.575.607.961.961.563.4㊀算法鲁棒性实验表4为该算法在医学多模态数据上的实验结果㊂由表4可以看出,本文算法即使在医学多模态图像上测试,在3种指标下都有不错的结果,证明本算法具有较高的鲁棒性㊂表4㊀本文算法在医学多模态数据上的实验结果Tab.4㊀Experimentalresultsofthisproposedalgorithmonmedicalmultimodaldata类型指标ACC/%NCMRT/sMR_PET13.00260.52PD_T197.314000.30PD_T298.495040.27Retina61.3616883.70SPECT_CT23.53510.49T1_T299.105220.29平均值65.475320.93R I F TH A P C G3M R S O U R D F M100908070605040302010匹配精度/%C S 1C S 2C S 3C S 4C S 5D N 1D N 2D N 3D N 4D N 5D O 1D O 2D O 3D O 4D O 5D O 6D O 7D O 8I O 1I O 2I O 3I O 4M O 7M O 1M O 2M O 3M O 4M O 5M O 6O O 1O O 2O O 3O O 4O O 5O O 6S O 1S O 2S O 3S O 4S O 5S O 6C S :不同季节D N :不同光照条件D O :深度图与可见光图I O :红外图与可见光图M O :地图与可见光图O O :可见光图与可见光图S O :合成孔径雷达图与可见光图图5㊀5种方法在多模态图像匹配数据集的匹配精度图Fig.5㊀Plotofmatchingaccuracyofthefivemethodsonthemultimodalimagematchingdataset4㊀结束语针对多模态遥感数据匹配的难点问题,图像间存在非线性辐射差异,本文提出一种基于交叉注意力机制的多模态遥感图像匹配网络㊂该网络利用相位一致性获得更稳定的特征点,同时利用交叉注意力机制学习多模态图像共有特征,在更容易获得的多波段遥感小容量数据集上进行训练㊂实验结果表明,本文方法在公开数据集上匹配性能优异,并在其他领域的多模态数据上仍然有效㊂但是当图像间有较大的旋转或者尺度差异性能会下降,后续将考虑对训练数据进行增强,同时优化网络结构进一步提高匹配速度㊂参考文献[1]YEYuanxin,LiShen,HAOMing,etal.Robustoptical-to-SARimagematchingbasedonshapeproperties[J].IEEEGeoscienceandRemoteSensingLetters,2017,14(4):564-568.[2]YEYuanxin,BRUZZONEL,SHANJie,etal.Fastandrobustmatchingformultimodalremotesensingimageregistration[J].IEEETransactionsonGeoscienceandRemoteSensing,2019,57(11):9059-9070.[3]LIJiayuan,HUQingwu,AIMingyao.RIFT:Multi-modalimagematchingbasedonradiation-variationinsensitivefeaturetransform[J].IEEETransactionsonImageProcessing,2020,29:3296-3310.211智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀[4]XIEXunwei,ZHANGYongjun,XIAOLing,etal.Anovelextendedphasecorrelationalgorithmbasedonlog-Gaborfilteringformultimodalremotesensingimageregistration[J].InternationalJournalofRemoteSensing,2019,40(14):5429–5453.[5]DETONED,MALISIEWICZT,RABINOVICHA.SuperPoint:Self-supervisedInterestpointdetectionanddescription[J].arXivpreprintarXiv:1712.07629,2018.[6]SARLINPE,DETONED,MALISIEWICZT,etal.SuperGlue:LearningfeaturematchingwithgraphNeuralNetworks[C]//2020IEEE/CVFConferenceonComputerVisionandPatternRecognition(CVPR).Seattle,WA,USA:IEEE,2020:4937-4946.[7]EFEU,INCEKG,ALATANAA.DFM:Aperformancebaselinefordeepfeaturematching[J].2021IEEE/CVFConferenceonComputerVisionandPatternRecognitionWorkshops(CVPRW).Nashville,TN,USA:IEEE,2021:4279-4288.[8]SCHONBERGERJL,HARDMEIERH,SATTLERT,etal.Comparativeevaluationofhand-craftedandlearnedlocalfeatures[C]//2017IEEEConferenceonComputerVisionandPatternRecognition(CVPR).Honolulu,HI:IEEE,2017:6959-6968.[9]ZHANGHan,NIWeiping,YANWeidong,etal.Registrationofmultimodalremotesensingimagebasedondeepfullyconvolutionalneuralnetwork[J].IEEEJournalofSelectedTopicsinAppliedEarthObservationsandRemoteSensing,2019,12(8):3028-3042.[10]QUANDou,WANGShuang,GUYu,etal.Deepfeaturecorrelationlearningformulti-modalremotesensingimageregistration[J].IEEETransactionsonGeoscienceandRemoteSensing,2022,60:1-16.[11]VASWANIA,SHAZEERN,PARMARN,etal.Attentionisallyouneed[C]//AdvancesinNeuralInformationProcessingSystem.LongBeach:NIPSFoundation,2017:5998-6008.[12]OPPENHEIMAV,LIMJS.Theimportanceofphaseinsignals[J].ProceedingsoftheIEEE,1981,69(5):529-541.[13]MORRONEMC,OWENSRA.Featuredetectionfromlocalenergy[J].PatternRecognitionLetters,1987,6(5):303-313.[14]KOVESIP.Imagefeaturesfromphasecongruency[J].QuarterlyJournal,1999,1(3):1-27.[15]JIANGXingyu,MAJiayi,XIAOGuobao,etal.Areviewofmultimodalimagematching:Methodsandapplications[J].InformationFusion,2021,73:22-71.[16]姚永祥,张永军,万一,等.顾及各向异性加权力矩与绝对相位方向的异源影像匹配[J].武汉大学学报(信息科学版),2021,46(11):1727-1736.[17]FANZhongli,LIUYuxian,LIUYuxuan,etal.3MRS:Aneffectivecoarse-to-finematchingmethodformultimodalremotesensingimagery[J].RemoteSensing,2022,14(3):478.[18]QUANDou,WANGShuang,GUYu,etal.Deepfeaturecorrelationlearningformulti-modalremotesensingimageregistration[J].TransactionsonGeoscience&RemoteSensing,2022,60:1-16.(上接第106页)[4]茆训诚,崔百胜,王周伟.多元旋转自回归条件异方差模型的构建与应用研究 以九种人民币汇率波动为例[J].上海经济研究,2014(01):70-82.[5]WANGYF.Predictingstockpriceusingfuzzygreypredictionsystem[J].ExpertSystemsWithApplications,2002,22(1):33-38.[6]JILANITA,BURNEYSMA.Arefinedfuzzytimeseriesmodelforstockmarketforecasting[J].PhysicaA:StatisticalMechanicsanditsApplications,2008,387(12):2857-2862.[7]KARATZINISGD,BOUTALISYS.Fuzzycognitivenetworkswithfunctionalweightsfortimeseriesandpatternrecognitionapplications[J].AppliedSoftComputingJournal,2021,106:107415.[8]FENGGuoliang,ZHANGLiyong,YANGJianhua,etal.Long-termpredictionoftimeseriesusingfuzzycognitivemaps[J].EngineeringApplicationsofArtificialIntelligence,2021,102:104274.[9]马楠,杨炳儒,邱正强,等.基于测度递进的模糊认知图及其应用[J].计算机工程与设计,2012,33(05):1958-1962.[10]YANGShanchao,LIUJing.Time-seriesforecastingbasedonhigh-orderfuzzycognitivemapsandwavelettransform[J].IEEETransactionsonFuzzySystems,2018,26(6):3391-3402.[11]LIUZongdong,LIUJing.Arobusttimeseriespredictionmethodbasedonempiricalmodedecompositionandhigh-orderfuzzycognitivemaps[J].Knowledge-BasedSystems,2020,203(prepublish).[12]HUANGYusheng,GAOYelin,GANYan,etal.Anewfinancialdataforecastingmodelusinggeneticalgorithmandlongshort-termmemorynetwork[J].Neurocomputing,2020(prepublish).[13]林春梅,何跃,汤兵勇,等.模糊认知图在股票市场预测中的应用研究[J].计算机应用,2006,26(01):195-197,201.311第8期石添鑫,等:一种基于交叉注意力机制多模态遥感图像匹配网络。
3rd International Workshop on Materials Engineering and Computer Sciences (IWMECS 2018) Design and Implementation of Scene Roaming System Based on VRSaihua Xu a, Yin Xiaohong, Xie FangsenNanchang Institute of Science and Technology, Nanchang 330108, Chinaa ****************Keywords: VR; scene roaming system; computer graphics; information technology; panoramaAbstract: The biggest characteristic of VR virtual roaming is that the object being roamed exists objectively, but the form of roaming is virtual in a different place. At the same time, the making of roaming object is the real data based on object. Virtual reality technology is appeared at the end of twentieth Century a new comprehensive information technology, which combines digital image processing, computer graphics, multimedia technology, sensor technology and other information technology branch, which greatly promoted the development of the computer technology. The paper presents design and implementation of scene roaming system based on VR.1.IntroductionVR panorama has broad applications, such as tourist attractions, hotels, construction and real estate; decoration exhibition. In architectural design, real estate or decoration can be accomplished by panoramic panorama technology. Not only make up for the shortcomings of a single point of view renderings, and three-dimensional animation to the economical and practical, the best choice as a designer.The human in the pursuit of rapid economic growth, also requires a higher quality of life, the technology is playing a central role. Virtual simulation (VR) refers to a special environment generated by computer, people can through their "projection" to the environment. Use the special device and operation control of the environment, to achieve a specific purpose, which is to dominate this environment [1]. It has its immersive interactive (immersion), (interaction) and ideas (imagination), which can make people immersed, beyond its natural form, and, with the interactive performance of multidimensional the environment of information. Rapidly penetrated into all sectors of society, and has been used in computer aided design, engineering and scientific data visualization, 3D Geographic Information System (GIS), has been widely used in medical, gaming and entertainment.In recent years, China's Internet penetration rate increased year by year, the Internet is going into the life and work NIC< report "people's investigation showed that at home and units in the proportion of Internet users in 2009 has been significantly improved, 83.2% of Internet users choose the Internet at home, while 30.2% of people choose in units of the Internet network, the Internet as a tool for everyday the value is rising. Unlimited business opportunities in all walks of life came into being. With its sharp eyes have begun to explore their business opportunities on the Internet.Virtual reality technology (Virtual Reality, referred to as VR) as a new media technology, its application areas including real estate planning, architecture and landscape design, Home Furnishing art design, experience education, medical simulation, military simulation, security monitoring, network simulation, traffic planning, cultural relics and ancient complex, virtual tourism, games and entertainment, and will gradually be involved to all walks of life, the full depth of the public daily life learning, become an integral part of the future digital life technology pillar.Virtual reality, multimedia and network information technology for the protection of historical relics, provides new means and methods of restoration and research at home and abroad have been paid attention to. In early 1990s, the British Museum, the Metropolitan Museum and other large museum has realized the virtual roaming. In recent years, China with great development in digitalcultural relics related areas, the Ministry of education established the "University Digital Museum Construction Engineering, Dunhuang Research Institute and Northwestern University jointly launched the" digital Dunhuang murals cooperative research ", the Imperial Palace Museum and Toppan Printing Company has developed a virtual the Imperial Palace in Beijing. The bid for the 2008 Olympic Games also put forward the" Virtual Olympic Museum "creative, has aroused great interest and concern of the International Olympic Committee, which host provides great help to get China Help.The research on virtual reality technology in the collection shows the application of practical task, the use of virtualization, virtual exhibition cultural digital technology, improve the display rate and the display effect of cultural relics and cultural relics protection entities, and further extended to break the constraints of time, the museum's collection, collection, exhibition and cultural dissemination function.2. Interactive roaming system based on VRAccording to the connotation and essential characteristics of virtual reality technology, it can be seen that its research and development is a relatively high technical requirements, it needs a corresponding software and hardware system environment to be matched. In addition to the perfect virtual reality software development platform and three-dimensional image processing system, according to the technical characteristics of virtual reality [2]. The system also requires a highly lifelike three-dimensional immersion, which is mainly realized by three-dimensional hearing, three-dimensional tactile or force sense and visual environment with high immersion. Stereo hearing is usually realized by three-dimensional surround stereo sound system, while highly immersive visual environment is usually realized by large screen stereoscopic projection display system.In addition, according to the technical characteristics of virtual reality, real-time interaction is the soul of virtual reality technology, which is different from other traditional media technology in essence. In virtual reality system, this kind of interaction is usually realized by virtual reality interactive device, and finally a complete virtual reality realization system is formed.This article from the modeling and rendering of 3D MAX baking technology to 3D campus roaming system using mature VRP-BUILDER virtual reality editor module to build a two development.The development of 3D and the method of 3D simulation roaming system based on VRP technology, Wuzhou University (North) to build the virtual scene, automatic roaming, manual roaming Campus navigation path, view the scenery of the campus, the campus information query, climate effect, dynamic effect of various entities, and do a detailed route according to the collision detection. At the same time according to the characteristics of 3D simulation roaming, roaming in the automatic and manual roaming process, based on the existing scene as the foundation, through the video, pictures, music. To the virtual reality system; provide convenience for the need to understand the Wuzhou University campus geographic information users [3].()1,,1,0,mod )()(10,−=−≡∑−=N k N l k x h k w j L l i l j j (1) The modeling method of Polygon+NURBS advanced modeling, each model using simplified model to the three-dimensional virtual campus architecture; using Bitmap bitmap +UVW Mapping mapping, VRAY real scene rendering method for reduction of the campus; using Max-for-VRP derived plug-in model into VRP-BUILDER virtual reality editor module, adding collision detection algorithm, VRP realize man-machine command line scripts the interactive function, to ensure the practicality of the system; the use of walking camera, dynamic roaming increase real 3D performance, multi angle view school environment; running from virtual reality editor module is derived for the EXE portable can run the executable file system.According to the real terrain data is used for terrain generation of a class of the most, at presentmost of the digital terrain model (Digital Terrain Model, DTM) to generate DTM data, by the sampling elevation in the grid map the value composition corresponding to the remote sensing image data captured texture plane or satellite.The texture image is mapped to the corresponding part in the reconstruction of terrain surface. Terrain rendering algorithm is simple, the DTM cell transformation of 4 adjacent grid points defined into 2 dimensional space of the triangle, then the optic internal area of pyramidal all such triangles sent to the graphics pipeline drawing.This algorithm can also be the image texture data to the highest resolution mapped to the corresponding polygon, but this is a very inefficient, because in general, triangle and remote sensing images The number of physical pixels is very large, and each individual triangle projection to the image space is very small, and a lot of texture pixels may be compressed to a pixel in the image, so that the effect is negligible [4]. Therefore, if directly generated by DTM terrain, even in high performance graphics hardware platform on real-time rendering, it is almost impossible, usually needs to be simplified to DTM. Data simplification methods will be discussed in detail in the next chapter.The biggest characteristic of this kind of virtual roaming is that the object being roamed is already objective and real, but the form of roaming is only fictitious in different places and at the same time. Roaming object making is real data based on object. It creates a virtual information environment in multidimensional information space, which can make users feel immersive and have perfect interaction ability with environment. And it helps to enlighten the idea that VR has not only been focused on computer graphics, it has been involved in a wider range of fields, such as videoconferencing, network technology and distributed computing technology. Virtual reality technology has become an important means of new product design and development.3.Design of 3D VR scene roaming systemThe virtual scene simulation technology is regarded as an important branch of virtual scene technology. Computer technology, image processing and graphics generation technology, multimedia technology, information synthesis technology, the integrated use of display technology and other high technology, its components include simulation modeling technology, animation technology and real-time visual technology at present domestic virtual scene technology market has not yet substantial development, but also has begun to take shape [5].The United States is in the leading position in the field, the basic research mainly focuses on perception, user interface, the four aspects of software and hardware. NASA (NASA) research focused on real time simulation of space station operation, they used a lot for the cockpit flight simulation technology [6]. The University of North Carolina (UNC) the computer department developed a help users in complex visual parallel processing system for real-time dynamic display of building landscape.Figure1. vehicle real-time 3D visual simulation and virtual environment Massachusetts Institute of Technology (Mrr) in 1985 to set up a media lab, a man named BOLIOtest environment for different graphic simulation experiment. University of Washington Washington Technology Center (HIT Lab) Interface Technology Laboratory of feeling, perception, cognition and motion control ability of.DaveSimS et al developed a virtual reality model to see how the system operates retreat in Illinois.The State University developed in vehicle design, system realization, distributed virtual remote collaboration support in different countries; different regions of the engineers can design through real-time collaboration computer network. George Mason University developed in a dynamic virtual environment in real-time fluid simulation system [7]. The California Graduate School of Naval Research Laboratory of NPS visualization the work in the virtual environment navigation and simulation.In order to achieve IEEE in distributed interactive simulation (Dls) network protocol under the support of the vehicle real-time 3D visual simulation and virtual environment. The Wright Patterson Air Force Base "3D image and Computer Graphics Lab" is S on GI4D/400 workstation built space satellite the virtual environment to simulate near space and describe the 3D graphical model of satellite earth's orbit and the running state of the simulation The information of the simulation object is more fully [8].Virtual reality (Virtual Reality VR) technology is appeared at the end of twentieth Century a new comprehensive information technology, which combines digital image processing, computer graphics, multimedia technology, sensor technology and other information technology branch, which greatly promoted the development of computer technology.The virtual technology of virtual reality technology (King) (such as virtual tour entity and Virtual Museum) virtual environment (landscape) technology (such as the restoration of generation Epang palace, Old Summer Palace has lost the building, construction has not yet been discovered Mausoleum of the First Qin Emperor) two categories. Application of virtual reality technology and cross field is very extensive. At present the successful use of the field of battlefield virtual reality technology the virtual reality simulation environment, combat command, aircraft, ship, vehicle virtual reality driving training, aircraft, missiles, ships and cars (virtual manufacturing virtual design system, including virtual reality construction) Display and visit of buildings, virtual reality surgery training, virtual reality game, virtual reality, film and television art, etc. so we can see that VR technology has strong market demand and technology drive [9].The construction of the integrated innovation of virtual reality system to realize the reconstruction of the product can be applied research and innovation training platform based on the overall goal is through the use of scientific, reasonable configuration, virtual laboratory system, the establishment of a virtual laboratory environment with the participants feel personally on the scene and real-time interactive capabilities, which will enhance the level of scientific research and teaching environment to a with the level of technological innovation platform. After the completion of the "integrated innovation based on reconfigurable product system virtual reality application of innovative research and training platform" should be a set of teaching, scientific research and demonstration functions, with immersive display and real-time interaction as the main function of the virtual reality laboratory environment and a new generation of digital media technology innovation platform.4.Design and implementation of scene roaming system based on VRThe mathematical model of distribution of Brown motion to generate realistic scenes from random fractal, many nonlinear phenomena he can express effectively in nature, is so far the best to describe the real terrain. Then he is a generalization of the Brown movement. The algorithm is: random fractal terrain generation technology of fractal geometry and FMB based on the method, used a Poisson step method (poissonfaulting), Fu Liye filter (fourierfiltersng), the midpoint displacement method (midpointdisplaeement), successive random additions (Suc.essiverandomadditions) and band limited noise accumulation method (summingbandlimit.dnoises) and other five categories. Among them, the random midpoint displacement method is the most simple and classic that is a direct application of FBM.A one-dimensional random midpoint displacement method for his own thought is: the known vertex elevation (or attribute) line, the midpoint of the elevation ( For the ends of attributes) or height (or attribute) the average value plus a random displacement, displacement of the two segment of the midpoint subdivision and recursive displacement, know that meet the resolution needed so far. The extension to the two-dimensional surface, according to the different pattern of the simulation can be divided into triangle grid simulation method, rectangular (square) grid simulation method, diamond square grid simulation method, parameter block grid simulation method, the thought and the one-dimensional similar. The square grid as an example the realization process of two-dimensional random midpoint displacement method.Good computer games, not only can achieve the purpose of work alternately, eliminate fatigue, and cultivate intelligence sentiment and inspire imagination. Computer game show is mainly virtual editing script under artificial scene behavior changes. So the application and effect of the virtual building scene roaming technology in the field of play a decisive role.The original delta game using a large number of indoor and outdoor architectural scenes, such as barracks, bunkers, tunnels, tower, armory, tower. Later the popular Quake, VR and other special police use the subway, train and ship building internal scene real-time strategy game has been more common. When this network game against the CS scene it is from 3D indoor and outdoor buildings. Even the sports games such as need for speed, FIFA, the stadium, bridge, tunnel and other buildings scene is also indispensable.Battlefield virtual simulation and command simulation training have all kinds of virtues of virtual simulation technology, such as safety, repeatability, economy, difficulty of battlefield environment adjustability, convenient against simulation, easy to achieve various tactical settings and so on.The virtual reality technology and multimedia technology, network technology is the application of computer technology in twenty-first Century three with the greatest development potential. Although the virtual reality technical difficulties still exist many unsolved theoretical problems have not yet overcome the impact on human life and work but also very little. However, it is foreseeable that in the near future, have a significant impact on the virtual reality technology is bound to human life and production.5.SummaryThe paper presents design and implementation of scene roaming system based on VR. Although all the countries have successfully developed some typical applications of virtual reality, but the application of high technology compared with other, is still in the initial stage of application development. Although it may not be able to clearly imagine, in the new century and new forms of popular virtual reality, but people can through the application of medium shape change the principle and extension of the field of medium main propagation characteristics, a reasonable conception of future scenarios.References[1] Wang Rui, the design and implementation of the money Xuelei.OpenSceneGraph 3D rendering engine. Beijing: Tsinghua University press, 2012.11.[2] Zhu Danchen, song Guiling. The realization of computer and modernization of virtual museum system based on Unreal3 and 2013, 34:48-52.[3] Duan Xinyu. The foundation of virtual reality and VRML programming. Beijing: Higher Education Press, 2014.3.[4] Xiao Peng, Liu Gengdai, Xu Mingliang.OpenSceneGraph 3D rendering engine programming guide. Beijing: Tsinghua University press, 2012.[5] Feng Yufen. Design and implementation of virtual cell roaming system based on Virtools.Computer simulation, 2015, 26 (6): 285-287.[6] Jiang Xuezhi, Li Zhonghua. Research status of virtual reality technology at home and abroad.Journal of Liaoning University of Technology, 2016.[7] Deng Zheng detailed translation of.OpenGL programming guide. Fourth edition. Beijing: people post and Telecommunications Press, 2015.[8] Yuan Haibo, Liu Houquan, and so on. 3D interactive. Microcomputer information based on scene semantics in virtual museums, 2012, 25 (9-3): 175-177.[9] Li Zhiwen, Han Xiaoling. Research status and future development of virtual reality technology and future development. Information technology and information technology (Human-ComputerInteraction Edition) 2015 (3): 94 - 96.。
第 44卷第4期2023 年7月Vol.44 No.4July 2023中山大学学报(医学科学版)JOURNAL OF SUN YAT⁃SEN UNIVERSITY(MEDICAL SCIENCES)分枝杆菌利福平耐药基因rpoB高通量突变文库的构建陈勇1,冯思源2,徐霖2,田国宝2(1. 成都医学院医学检验系,四川成都 610500; 2. 中山大学中山医学院免疫学与微生物学系,广东广州 510080)摘要:【目的】 建立利福平耐药基因rpoB高通量突变文库。
【方法】 通过同源重组和L5 attB噬菌体整合位点交换构建耻垢分枝杆菌ΔrpoB attB::rpoB菌株;基于L5 attB质粒交换系统和抗性选择培养基,挑取48个克隆以验证质粒替换的效率;针对利福平耐药决定区(RRDR)区域内以每3个碱基为单位设计简并性引物,通过PCR扩增获得该区域81个碱基的全覆盖式突变文库;文库片段与载体进行无缝克隆转化到大肠杆菌中形成大肠杆菌突变文库;基于质粒交换原理,将突变质粒库转化至耻垢分枝杆菌ΔrpoB attB::rpoB菌株中,替换原有L5 attB位点质粒,形成耻垢分枝杆菌突变文库;通过基因组提取、建库和高通量测序明确文库的基因型种类。
【结果】 与野生型rpoB基因(5 600 bp)相比,敲除株的扩增片段为2 200 bp,证明耻垢分枝杆菌ΔrpoB attB::rpoB条件性敲除株构建成功;质粒替换的成功率为100%;大肠杆菌文库和耻垢分枝杆菌文库中单氨基酸突变类型均为540种,大肠杆菌文库多点突变5 301种,耻垢分枝杆菌文库多点突变853种,大肠杆菌文库和耻垢分枝杆菌文库相关系数为0.84。
【结论】 开发了一种针对分枝杆菌必需基因rpoB突变体文库的构建策略,成功建立了利福平耐药基因rpoB的突变文库。
关键词:分枝杆菌;利福平耐药;突变文库;rpoB中图分类号:R378 文献标志码:A 文章编号:1672-3554(2023)04-0634-08DOI:10.13471/ki.j.sun.yat-sen.univ(med.sci).2023.0413Construction of a High-Throughput Mutation Library of MycobacteriumRifampin Resistance Gene rpoBCHEN Yong1, FENG Si-yuan2, XU lin2, TIAN Guo-bao2(1. School of Laboratory Medicine, Chengdu Medical College, Chengdu 610500, China; 2. Department of Microbiology and Immunology, Zhongshan School of Medicine, Sun Yat-sen University, Guangzhou 510080, China)Correspondence to: TIAN Guo-bao; E-mail:****************Abstract:【Objective】 To establish a mutation library of rifampicin resistance gene rpoB.【Methods】 The ΔrpoB attB::rpoB strain of Mycobacterium smegmatis(M. smegmatis) be constructed by homologous recombination and L5 attB phage integration site exchange. Based on the L5 attB plasmid exchange system and resistance selection medium, 48 clones are selected to verify plasmid replacement efficiency. Degenerate primers are designed every 3 bases in the rifampicin resis⁃tance determining region (RRDR), and a full-coverage mutation library of 81 bases in RRDR region is obtained by PCR amplification. The library fragments are seamlessly cloned into the vector and transformed into Escherichia coli(E. coli)to form an E. coli mutation library. Based on the principle of plasmid exchange, the mutant plasmid library is transformed into the M. smegmatis strain ΔrpoB attB::rpoB, and the original L5 attB site plasmid is replaced to form the M. smegmatis mu⁃tant library. The genotype of the library are determined by genome extraction, library construction and high-throughput se⁃quencing.【Results】Compared with the wild-type rpoB gene (5 600 bp),the amplified fragment of the rpoB knockout strain is 2 200 bp, which proved that the ΔrpoB attB::rpoB conditional knockout strain of M. smegmatis is successfully constructed. The success rate of plasmid replacement is 100%. There were 540 kinds of single amino acid mutations in bothE. coli library and M. smegmatis library, 5 301 kinds of multi-point mutations in E. coli library, and 853 kinds of multi-·基础研究·收稿日期:2023-03-17基金项目:国家自然科学基金(81830103,82061128001)作者简介:陈勇,研究方向:临床细菌耐药与感染,E-mail:***********************;田国宝,通信作者,博士,教授,研究方向:临床细菌耐药与感染,E-mail:****************第4期陈勇,等.分枝杆菌利福平耐药基因rpoB高通量突变文库的构建point mutations in M. smegmatis library. The correlation coefficient between E. coli library and M. smegmatis library is 0.84.【Conclusions】 We have developed a strategy to construct a library of mutants targeting the essential mycobacterial gene rpoB, and successfully established a mutant library of rifampicin resistance gene rpoB.Key words:mycobacterium; rifampicin resistance; library of mutations;rpoB[J SUN Yat⁃sen Univ(Med Sci),2023,44(4):634-641]结核病是造成人类死亡的重要原因之一。
建筑学专业英语资料Design for Accessibility.In the realm of architecture, the concept of accessibility transcends mere compliance with building codes. It encompasses a profound commitment to ensuringthat all individuals, regardless of their abilities or disabilities, have equal access to the built environment. By embracing the principles of universal design, architects can create spaces that foster inclusivity, promote well-being, and empower people from all walks of life.Universal Design Principles.The foundation of accessible design lies in the principles of universal design, which advocate for:Equitable Use: Designing spaces that can be used by people with diverse abilities, without the need for adaptation or specialized design.Flexibility in Use: Cater to a wide range ofindividual preferences and abilities by providing adjustable or adaptable features.Simple and Intuitive Use: Creating spaces that are easy to understand and navigate, regardless of the user's experience or cognitive ability.Perceptible Information: Communicating information effectively through visual, auditory, and tactile cues, accommodating sensory impairments.Tolerance for Error: Minimizing risks and hazards, and allowing for mistakes without compromising safety or usability.Low Physical Effort: Designing spaces that require minimal physical exertion, reducing barriers forindividuals with mobility impairments.Size and Space for Approach and Use: Ensuring adequatespace for maneuvering wheelchairs, mobility aids, and other assistive devices.Benefits of Accessible Design.Accessible design extends beyond legal requirements; it offers a myriad of benefits for both individuals with disabilities and the broader community:Social Inclusion: Creating environments that welcome and empower people with disabilities, breaking downbarriers to participation.Improved Quality of Life: Enhancing well-being by providing accessible housing, public spaces, and facilities that cater to diverse needs.Economic Empowerment: Enabling individuals with disabilities to lead fulfilling and productive lives by facilitating access to employment, education, and social opportunities.Enhanced Building Value: Accessible design increases the value of buildings by making them more marketable to a wider range of potential occupants.Sustainability: By considering the needs of all users, accessible design promotes inclusivity and environmental sustainability.Implementation Strategies.Incorporating accessibility into architectural design requires a thoughtful approach:Site Selection: Choose sites that are well-connected to transportation and accessible from various points of entry.Entrances and Exits: Provide multiple accessible routes into and out of buildings, including ramps, elevators, and automatic doors.Interior Circulation: Design wide hallways, clearaisles, and accessible routes throughout the building, considering the turning radii for wheelchairs.Accessible Restrooms: Ensure restrooms are spacious, well-lit, and equipped with accessible fixtures, grab bars, and alarms.Universal Signage: Use clear, concise signage that is easy to read and understand for individuals with sensory impairments.Acoustics and Lighting: Control noise levels and provide adequate lighting to support individuals withvisual or auditory impairments.Assistive Technologies: Integrate assistive technologies, such as elevators with audible announcements and tactile controls, for individuals with mobility or sensory impairments.Conclusion.Design for accessibility is not merely a technical requirement but a moral and ethical imperative. By embracing the principles of universal design, architects have the power to create built environments that are welcoming, empowering, and inclusive for all. By fostering accessibility, we not only improve the lives of individuals with disabilities but also create a more just, equitable, and enriching society for everyone.。