Fife纠偏系统解决方案
- 格式:docx
- 大小:2.60 MB
- 文档页数:16
纠偏常见问题及对策1.“alarm”红灯亮,传感器报警,检测不到材料A.探头与控制器连接是否正确,或探头设置是否正确(控制器有二个插座可供探头连接。
控制器SENSOR模式参数中可修改S1或者S2与之对应,S3为双探头对中纠偏)。
B.对于TSA 型CCD传感器,则可能是跟踪目标不在检测范围内。
2.检测信号不稳定或者自动跟踪不正常:A.检查探头设置模式是否与实际对应(跟线,跟色块,跟边);注意TSA 型CCD传感器跟色块及跟色块均应选择跟色块模式!B.光电探头和材料的距离是否合适(一般在25-30mm左右,垂直照射材料);C.线条是否过宽(3mm以上的线条),色块是否有足够的对比度;D.探头是否做了对比度校准操作;E.材料是否反光,要做对应的光源设置(LED正常材料,DIFF反光材料);F.系统可能受环境的电磁干扰(此时界面偏差状态显示会有无序的跳跃,可做接地处理);G.张力控制是否稳定。
3.自动状态显示偏差并且持续不纠正为零A.TOL(盲区)设置过高,通常为设置为1或2;B.VMI(最小速度)数值过低,通常设置为10;C.驱动器安装与导轨不平行,导轨摩擦系数高;D.负荷过高。
4.自动状态显示偏差稍大,纠偏精度不高:A.原材料偏差较大,需要提高GKP、ACC及VMI,同时降低机器速度;B.原材料偏差不大,可尝试适当降低GKP、ACC、VMI及TOL;C.驱动器前后连接间隙过大;D.客户机器相关部件问题。
5.驱动器在自动模式下往错误方向运行:A.驱动器极性是否设置正确(设置DIR值或者跟边模式)。
6.系统在运行时正常纠偏,但是稍有抖动:A.降低GKP(一般调整范围在50-150)及ACC(1-50)参数值,一般情况按默认值设置。
7.系统单边工作:A.驱动器可能左右极限限位,确保在工作前居中;B.传感器跟踪信号仅有单边信号,需调整传感器;感谢您对本产品的使用,按照以上所述,99%的问题均可排除!如有任何疑问欢迎来电咨询!。
成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:图1,马达外型图图2,电眼外型图图3,电眼线外型图图4 ,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关: A, 马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm 即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004 设定参数(按照以下方法进行检查,若参数不对,则修改)首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4 , E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至3.0(3)按住不松手,按至16(自动速度),松开,按至20(4) 17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100(7)按住不松手,按至26(电机正行程),松开,按至30(8)按住不松手,按至27(电机负行程),松开,按至-30(9)按住不松手,按至34(编码器解析度),松开,按至8(10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750(13)按住不松手,按至50(速度_P),松开,按至2.0(14)按住不松手,按至51(速度_I),松开,按至0.1(15)56 电流 4A(2.9时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至2.9(17)按住不松手,按至81(马达极限信号),松开,按至2(18)按住不松手,按至83(回中开关信号),松开,按至-3(19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22)97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1(24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
E+L-EPC纠偏系统说明书本说明适用于德国E+L纠偏常规产品目录E+L-EPC纠偏系统说明书 (1)一、E+L-EPC纠偏系统总体说明 (3)二、E+L-EPC纠偏系统所需零件说明 (4)三、E+L-EPC纠偏系统机械安装说明 (5)3.1、控制器的安装 (5)3.2、电眼的安装 (5)3.2.1、通过EPC纠偏应用场合确认电眼安装位置 (5)3.2.2电眼的安装要求 (6)3.3、电机的安装 (6)3.3.1、确定电机型号 (6)3.3.2、确定电机机械中心 (7)3.3.3、调整电机机械中心 (7)3.3.4、安装电机 (7)3.4接近开关的安装 (7)3.4.1、接近开关感应片 (7)3.4.2、接近开关安装位置 (7)四、E+L-EPC纠偏系统配线说明 (10)4.1确认电压 (10)4.2、电机线布线要求 (10)4.3、E+L布线要求 (10)五、E+L-EPC纠偏面板说明 (10)六、E+L-EPC纠偏系统参数设定 (11)6.1、CAN网络群组地址设定 (11)6.1.1、RK4004地址设定 (11)6.1.2、FR5001电眼地址设定 (12)6.2、RK4004参数设定 (13)七、E+L-EPC纠偏系统试车 (15)八、E+L-EPC纠偏系统维护及故障说明 (15)8.1、EPC纠偏系统日常维护 (15)8.2、通过RK4004错误码信息来解决故障 (15)8.3、通过FR5001电眼错误码信息来解决故障 (16)九、附件 (17)附件一、电机尺寸图附件二、电机参数值附件三、EPC标准接线图纸附件四、RK4004控制板参数设定手册一、E+L-EPC纠偏系统总体说明我们将用一个电眼检测材料边缘来纠偏的纠偏系统称为EPC(Edge psoition control),以下简称EPC。
我们将用两个电眼检测材料中心来纠偏的纠偏系统成为CPC(Center position control),以下简称CPC。
美塞斯(MC05)国际集团Fife 纠偏系统产品系列卷材纠偏控制器FIFE卷材(MC05)纠偏控制器功能强大,安装简单,操作方便,具有极高的动态响应水平以提高纠偏精确度并减少浪费。
D-MAX系列卷材纠偏系统1.一个由功能弱碱、模块化的组件构成的完整系统,用以提高效率和卷装质量。
2.模块化设计理念,可以作为预接线控制器系统或者多功能组件中的独立功能模块使用。
3.控制器外观朴实,能够提供最高水平的纠偏精确,选用功能强大,例如调整联网和远程系统监控功能。
4.图形化的操作界面,简易明懂的操作语言,可以使您的安装和操作变得简单。
Polaris卷材纠偏控制器1.精密的卷材纠偏控制器,安装和操作都很简单。
2. 5.67"×5.67"×4.06"(144mm×144mm×103mm)的小巧箱体,容易嵌入机器的控制板中。
3.直观而友好的操作界面能减少两批产品转换中的停工时间。
4.高动态响应性能,确保恒定、优质的卷装。
CDP-01纠偏卷材控制器1.具有高品质的动态响应性能,能够驱动单个、两个或者三个纠偏器同时使用。
2.内置信号放大器,专门用于红外感应器在检测透明卷材时将信号放大,提高检测精确。
3.不需要PLC也可以同时控制多达3套纠偏系统。
网络通讯可选的串行总线通讯协议转换器,使您可以通过现有的ContrklNet,DeviceNet,InterBus,Profi-Bus,ModBus/TCP ErtherNet,或EtherNet IP获得纠偏数据。
动力装置不管您选用什么样的控制系统,FIFE动力装置都肯有足够的灵活性来满足任何卷材和载荷方面的要求。
1.适合于承受较大载荷的放卷?收卷电气液压式或气动液压式纠偏系统。
2.紧凑、模块化的结构是完全独立可用的。
3.几乎不需要维护。
感应器一种规格的感应器无法满足所有需要,正是基于这个原因,FIFE研发了各种的感应器来满足每一个纠偏应用要求。
F5 Link Controller 多链路接入解决方案北京华胜天成科技股份有限公司服务交付中心目录1. 问题的提出 (4)1.1 链路单点故障 (4)1.2 Internet用户访问快慢差异 (4)2. F5提供的最佳解决方案 (5)2.1 使用F5公司的LinkControl多链路设计结构图: (5)2.2 网络出口结构建议 (5)2.3 技术实现原理 (6)2.4 技术实现原理讲解 (7)2.4.1 链路的健康检查 (7)2.4.2 依据链路健康状态和流量来均衡处理DNS 解析 (7)2.4.3 系统切换时间 (7)2.4.4 LinkController替代现有的DNS服务器 (7)2.4.5 注册多一个NS记录 (8)2.4.6 服务器负载均衡 (8)2.4.7 强大而且免费的安全防护功能 (8)2.4.8 有效解决防火墙的处理能力瓶颈 (9)2.4.9 F5 i–Control开放的API接口介绍 (11)3. 方案优势阐述 (13)3.1.1 设备及拓扑结构的优点 (13)3.1.2 安全机制方面 (13)3.1.3 与应用的结合方面 (14)3.1.4 投资回报方面 (14)4. 相关产品介绍 (15)可靠的网络连接 (15)最大带宽和投资回报 (16)高级WAN 链路管理 (16)配置和管理 (17)IPv6 网关 (18)强化的安全性能 (18)简单、安全的管理 (18)订购信息 (19)最低系统要求: (19)物理规范 (19)1.问题的提出通常用户系统结构设计图如下:1.1链路单点故障在系统原有系统结构中,采用单条链路接入,一个或多个DNS服务器,这些服务器对于同一个域名均解析为同一个地址。
在该种网络结构之中,无论主机系统、网络系统的规划有多么完美, 完全的排除了应用瓶颈和单点故障, 都还存在一个非常明显的单点故障, 就是国际网络接入部分的方案不够完整, 一旦国际网络接入部分出现中断就直接意味着所有应用的中断。
E+L-EPC纠偏系统说明书本说明适用于德国E+L纠偏常规产品目录E+L-EPC纠偏系统说明书 (1)一、E+L-EPC纠偏系统总体说明 (3)二、E+L-EPC纠偏系统所需零件说明 (4)三、E+L-EPC纠偏系统机械安装说明 (5)3.1、控制器的安装 (5)3.2、电眼的安装 (5)3.2.1、通过EPC纠偏应用场合确认电眼安装位置 (5)3.2.2电眼的安装要求 (6)3.3、电机的安装 (6)3.3.1、确定电机型号 (6)3.3.2、确定电机机械中心 (7)3.3.3、调整电机机械中心 (7)3.3.4、安装电机 (7)3.4接近开关的安装 (7)3.4.1、接近开关感应片 (7)3.4.2、接近开关安装位置 (7)四、E+L-EPC纠偏系统配线说明 (10)4.1确认电压 (10)4.2、电机线布线要求 (10)4.3、E+L布线要求 (10)五、E+L-EPC纠偏面板说明 (10)六、E+L-EPC纠偏系统参数设定 (11)6.1、CAN网络群组地址设定 (11)6.1.1、RK4004地址设定 (11)6.1.2、FR5001电眼地址设定 (12)6.2、RK4004参数设定 (13)七、E+L-EPC纠偏系统试车 (15)八、E+L-EPC纠偏系统维护及故障说明 (15)8.1、EPC纠偏系统日常维护 (15)8.2、通过RK4004错误码信息来解决故障 (15)8.3、通过FR5001电眼错误码信息来解决故障 (16)九、附件 (17)附件一、电机尺寸图附件二、电机参数值附件三、EPC标准接线图纸附件四、RK4004控制板参数设定手册一、E+L-EPC纠偏系统总体说明我们将用一个电眼检测材料边缘来纠偏的纠偏系统称为EPC(Edge psoition control),以下简称EPC。
我们将用两个电眼检测材料中心来纠偏的纠偏系统成为CPC(Center position control),以下简称CPC。
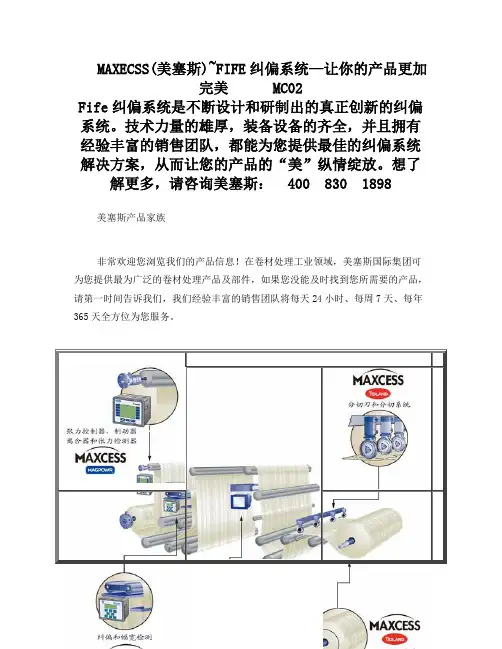
MAXECSS(美塞斯)~FIFE纠偏系统—让你的产品更加完美 MC02Fife纠偏系统是不断设计和研制出的真正创新的纠偏系统。
技术力量的雄厚,装备设备的齐全,并且拥有经验丰富的销售团队,都能为您提供最佳的纠偏系统解决方案,从而让您的产品的“美”纵情绽放。
想了解更多,请咨询美塞斯:400 830 1898美塞斯产品家族非常欢迎您浏览我们的产品信息!在卷材处理工业领域,美塞斯国际集团可为您提供最为广泛的卷材处理产品及部件,如果您没能及时找到您所需要的产品,请第一时间告诉我们,我们经验丰富的销售团队将每天24小时、每周7天、每年365天全方位为您服务。
您知道美塞斯国际集团的产品线都有哪些产品吗?您知道我们可以为您的生产应用提供哪些解决方案吗?请您在下面的图表中找到您所需要的产品吧! GO>>切系统解决方案不仅可以满足您现有的需求,而且还为您分切设备日后的升级留下空间,满足您的每一个需求。
50多年的卷取经验,我们为您提供种类繁多、结实耐用要产品:FIF 偏控器,FIF 偏传器,FIF 偏驱器,FIF 动式筒支架,MAG 张力制器MAG 张力感器MAG 离合和制器,TID 分切刀,TID机械连锁切刀TID电子位分系统TID气涨轴大利金印版印机,口机张力控制分切&卷取分切从单个刀架到全自动分切系统,我们提供创作。
监控制先进的张力控制和显示器,专为提供精确张力和扭矩控制设计,适合所有TIDLAND高性能分切刀为您提供一流的卷材分切质量,适用于轻型改装乃至重型工厂等各种肥分切生产场合。
有三种规格(I型、II型、III型),可以剪切,压切或者割切几乎所有材料。
TIDLAND分切刀还有一个独特的可180度反转安装的刀架,可以充分利用底刀轮的两面。
TIDLAND分切刀独特的防尘设计,几乎免维护,提高生产效率。
勒口机是中国最早引进韩国生产的全自动书籍勒口机的专业公司,从2001年开始在国内生产DW-460B型全自动勒口机, 2005年起生产LA-300新型全自动书籍勒口机,代理韩国原产与胶钉线连机的NEW DW-430勒口机,质量可靠,服务便捷,得到用户广泛好评。

纠偏控制器(美塞斯 Fife Mc01纠偏系统400/830/1898)英文翻译:Correction Controller产品用途:纠偏控制器可对各种卷材进行纠偏工作,根据纠偏材料的印刷图案不同而可以选择跟边,跟线方式,并自由设定单电眼或双电眼检测,纠偏执行电机为永磁低速同步电机。
主要应用于印刷包装、造纸、薄膜、纺织等行业需要控制卷边齐整的场合。
产品特点:1、内量智能单片机控制2、纠偏响应速度可调节3、带可提供单电眼或双电眼纠偏跟踪4、跟线和跟边自定分类:1、GXGK-A 光电纠偏控制器工作电压:AC220V±15% 50Hz纠偏控制器使用说明1.(〃以十进制表示的传感器检测有效距离:〃 STUP输入〃错误信息〃在参数设定模式下,显示屏显示参数号(例F3)按SETUP 键显示此参数的设定值。
(2)条形显示管:显示马达位置。
在进入参数设定模式时,显示一连续从底部到顶部不断移动的光标。
(3)如何进入和退出功能设定:在MAN或AUTO模式下均可按ENTER+RIGHT键进入参数设定模式。
按RIGHT或LEFT键可选择不同的参数。
退出参数设定模式同时按ENTER+LEFT键或选择参数F60.关于参数的设定模式下如何操作参阅参数设定。
(4)在MAN模式下如何进行纠偏(相应的MAN 指示灯亮)【1】在手动模式下纠偏…按MAN键进入手动控制模式(通常它是用来中断纠偏调整)。
MAN 键的功能也可通过外部控制(详细信息参阅参数设定F42)【2】驱动中心…同时按SETUP+S.C键,驱动器定位在行程的中心位置(当限位开关位置改变时数码管显示的数值将超出〒80,此时应按照参数F21进行设定。
【3】手动驱动器定位:…按LEFT和RIGHT键使驱动器定位在目标点上,同时按SETUP+LEFT 或RIGHT键时可连续移动。
【4】驱动位置显示…按SETUP键显示驱动器相对参考点的位置,显示值单位是mm,0表示行程的中心位置。
纠偏系统工作原理纠偏系统工作原理一、引言纠偏系统是一种常见的自动控制系统,广泛应用于机器人、航空航天、导航等领域。
其主要作用是将输入信号中的误差或偏差进行补偿,从而使输出信号达到预期的目标值。
本文将详细介绍纠偏系统的工作原理。
二、纠偏系统的组成部分纠偏系统通常由传感器、执行器、控制器和反馈环路四个部分组成。
1. 传感器:传感器是纠偏系统中最基本的组成部分,其主要作用是采集输入信号并将其转换为电信号。
常见的传感器包括光电传感器、接近开关、压力传感器等。
2. 执行器:执行器是指根据控制信号产生相应动作的装置,其主要作用是实现对被控对象(如电机或阀门)进行控制。
常见的执行器包括电机、液压缸等。
3. 控制器:控制器是纠偏系统中最核心的组成部分,其主要作用是根据输入信号和反馈信号计算出控制误差,并输出相应的控制信号给执行器。
常见的控制器包括PID控制器、模糊控制器等。
4. 反馈环路:反馈环路是指将执行器的输出信号通过传感器采集后再次输入到控制器中进行比较和修正的过程。
其主要作用是实现对输出信号的精确控制。
常见的反馈环路包括位置反馈、速度反馈等。
三、纠偏系统的工作原理纠偏系统的工作原理可以分为两个阶段:计算误差和输出控制信号。
1. 计算误差计算误差是指将输入信号与目标值之间的差异进行计算,并将其转换为控制误差。
通常情况下,控制误差可以表示为目标值与实际值之间的偏差,即:e(t) = r(t) - y(t)其中,e(t)表示控制误差,r(t)表示目标值,y(t)表示实际值。
2. 输出控制信号输出控制信号是指根据计算出来的误差进行修正,并输出相应的控制信号给执行器。
在此过程中,通常需要使用一种称为“闭环反馈”的技术来实现对输出信号的精确调节。
闭环反馈技术是指将执行器输出信号再次输入到控制器中进行比较和修正的过程,从而实现对输出信号的精确控制。
四、纠偏系统的应用举例纠偏系统在实际应用中具有广泛的用途。
以下是一些常见的应用举例:1. 机器人控制:纠偏系统可以被用来控制机器人的位置和姿态,从而实现对其运动轨迹的精确控制。
【最新】纠偏控制器简介纠偏控制器英文:Controller 型号:FIfe/MC01/400/830/1898 美塞斯纠偏控制器可对各种卷材进行纠偏工作,光电纠偏又称边缘位置控制(E.P.C)经发展又有线条位(L.P.C)中心线位置控制(C.P.C),可对各种卷材进行纠偏工作,根据纠偏材料的印刷图案不同而可以选择跟边,并自由设定单电眼或双电眼检测,纠偏执行电机为永磁低速同步电机。
主要应用于印刷包装、造纸、薄膜。
特点1、主要应用于印刷包装、造纸、薄膜。
2、内量智能单片机控制3、纠偏响应速度可调节4、带可提供单电眼或双电眼纠偏跟踪5、跟线和跟边自定用途纠偏控制器是电子纠偏系统的心脏。
纠偏控制器可对各种卷材进行纠偏工作,和适当的感应器、驱动器、等纠偏组件组合,帮助生产线有效而且高效的运转。
主要应用于印刷包装、造纸、薄膜。
产品分类1.Fife彩色触摸屏紧凑结构无刷马达可选项接纸台感应器微调装置2.D-MA_ 友好的按键布局 - 终端用户或者内部操作员可以直观操作3.Polaris DP背光式LCD - 易于理解和操作自动设置 - 自动配置控制器,优化性能直观的菜单布局 - 减少操作的混乱和潜在的停机时间高动态响应工作原理在物料卷绕过程中,由光电传感器检测边或线的位置,以拾取边或线位置偏差信号。
再将位置偏差信号传递给光电纠偏控制器进行逻辑运算,向机械执行机构发出控制信号,驱动机械执行机构,修正物料运行时的蛇形偏差,保证物料直线运动。
可选装左、右限位开关防止系统失控。
性能指标1、对线工作:标志线宽度不小于2mm; 2、对边工作:边标志侧保持2mm_5mm以上同色度区以外;3、检出距离:同轴反射型光电眼(可见常见光)为12mm4、响应时间:光电眼响应时间为2ms,系统响应速度为 50ms; 5、纠编精度:±1mm;6、最大推重:1.5T/3T可选;7、失控保护:自带极限位置失控保护装置,以便观察。
日常机械保养的原则和要求设备的日常维护保养是设备维护的基础工作,必须做到制度化和规范化。
MAXCESS 美塞斯(MC08)Fife纠偏控制器纠偏/纠偏控制器(mc08)纠偏与检验GUIDING & INSPECTION (mc08)成立于1939年Established in 19391989 年并入美塞斯国际集团Acquired in 1989 by Maxcess International发明世界上第一套纠偏系统Inventor of the first Web Guiding System in the world不断的设计和研制真正创新的纠偏和检验产品Continuous development & engineering of innovative Web Guiding & Inspection products持续地帮客户提高生产性及生产率Continually helps customers to improve their efficiency & productivity系统介绍:导向辊纠偏系统Steering Guide Systems卷材图像检验解决方案Web Inspection Solutions电动导轨Positioners驱动器Actuators纠偏组件及系统Guiding Components & Systems控制器Controller动力装置Power Units感应器Sensors其中其产品包括:纠偏控制器电光纠偏纠偏系统自动纠偏纠偏装置MAXCESS 美塞斯(MC08)MAGPOWER张力系统控制器张力控制(mc08)TENSION CONTROL成立于1968年Established in 19681996年并入美塞斯国际集团Acquired in 1996 by Maxcess International工业领域最大的张力控制系统供应者Largest installed base of Tension Control Systems in the industry 精确,高质量和高反应能力Accuracy, high quality & competence优秀的服务和支持Unique service & support最快速满足客户需求Line requirements tailored to customers’ needs磁粉制动器和磁粉离合器Magnetic Particle Clutches & BrakesPerma-Tork 永磁离合器与制动器Perma-Tork Permanent Magnet Clutches & Brakes张力控制系统Tension Control System 张力控制器Controls张力检测器与张力计Load Cells & Readouts 气动制动器Pneumatic Brakes张力传感器MAXCESS 美塞斯(MC08)Tidland 分切系统分切卷绕WINDING & SLITTING(mc08)成立于1951年Established in 19511995 年并入美塞斯国际集团Acquired in 1995 by Maxcess International世界上第一根气胀轴发明者Inventor of the first Air Shaft in the world行业第一把电子分切刀发明者Inventor of industry’s first Electronic Knifeholder定制的应用和独特的服务,精确地满足客户的需求Tailored applications & unique service which precisely meet customers’ needs产品介绍:人体工程学气胀轴和卡盘Ergonomic Shafts & Chucks气胀轴Core Shafts差动气胀轴Differential Air Shaft大型纸厂气胀轴/纺锭Mill Duty Air Shafts/Reel Spools制动器安全卡盘Safety Chucks 制动器Brake卷芯卡盘Core Chucks卷筒修复器Crushed Core Restorers分切刀Knifeholders for Slitters自动分切系统Automatic Slitting Systems 手动分切系统Manual Slitting Systems操作员安全防护配件Slitter Safety for Operators 分切配件Slitting Accessories电子分切刀E-knifeholder分切系统自动分切无纺布分切电子分切刀详情请登录➢网址➢联系电话:4008301898。
智能纠偏设备的原理是
智能纠偏设备的原理是通过内置的传感器和算法,实时监测车辆的运动状态和位置信息,与预设的理想轨迹进行比较,然后通过控制车辆的转向系统,使车辆自动纠正偏离轨迹的方向。
具体原理包括以下几个步骤:
1. 传感器检测:设备内置了加速度计、陀螺仪等传感器,用于检测车辆的姿态、加速度、角速度等运动参数。
2. 数据采集与处理:传感器获取到的数据会通过算法进行处理和分析,得出车辆当前的运动状态和位置信息。
3. 理想轨迹比对:设备内部存储了预设的理想轨迹,将当前位置与理想轨迹进行比对,确定车辆是否偏离了轨迹。
4. 纠偏控制:如果车辆偏离了理想轨迹,智能纠偏设备会发送信号给车辆的转向系统,控制车辆进行转向调整,使车辆重新回到理想轨迹上。
5. 实时监测与调整:智能纠偏设备会不断地监测车辆的运动状态和位置信息,根据实时数据进行调整,确保车辆能够保持在理想轨迹上。
总的来说,智能纠偏设备通过传感器检测车辆的运动状态和位置信息,与预设的理想轨迹进行比对,并通过控制车辆的转向系统,使车辆自动纠正偏离轨迹的方
向,从而实现车辆的自动纠偏。
自动纠偏系统工作原理
自动纠偏系统是一种用于检测和纠正文本中错误拼写和语法问题的工具。
它基于自然语言处理技术和机器学习算法,通过分析文本中的语言规则和上下文,识别并校正错误的单词拼写、语法结构和用词选择。
自动纠偏系统的工作原理可以分为以下几个步骤:
1. 语言模型:系统首先构建一个基于已知语言规则和大量文本数据的语言模型。
这个语言模型可以帮助系统理解词汇、语法结构和词语的上下文关系。
2. 错误检测:系统读取待检测文本,并使用语言模型和特定的算法来识别文本中的错误。
例如,系统可以检测出拼写错误、语法错误或用词不当等问题。
3. 错误纠正:一旦错误被检测出来,系统会尝试给出最佳的纠正建议。
它可以根据上下文信息和语言模型对错误进行推测,并给出可能的正确词语或句子。
4. 反馈学习:系统会采集用户反馈数据,并将其用于改进系统的准确性和性能。
系统通过机器学习算法不断优化自身的纠错能力。
5. 实时应用:自动纠偏系统可以集成到各种应用程序中,如文本编辑器、搜索引擎、聊天机器人等,帮助用户在实时交互中提高文本质量和准确性。
需要注意的是,自动纠偏系统的纠错能力可能受限于语料库的质量和覆盖范围。
一个良好的语言模型和大规模文本语料库可以提高系统的准确性和可靠性。
此外,不同语言的自动纠错系统可能会有所不同,因为每种语言都有其独特的语法和规则。