基于SIMULINK的汽车悬架系统动态仿真
- 格式:pdf
- 大小:227.70 KB
- 文档页数:3
基于SIMULINKPID控制策略下的主动悬架系统的动态仿真引言主动悬架系统是一种汽车悬架系统,通过感应车辆状态和路面激励,调整悬架的刚度和阻尼,以提高车辆的操控性和乘坐舒适性。
PID控制是一种常用的控制策略,通过调节控制器的比例、积分和微分参数,可以使系统快速稳定地达到期望状态。
本文基于SIMULINK平台,通过PID控制策略,对主动悬架系统进行动态仿真。
主动悬架系统模型主动悬架系统由车体、悬架系统和控制器三部分组成。
车体与悬架系统连接,通过控制器对悬架系统进行控制。
悬架系统由弹簧和阻尼器组成,用于支撑和吸收路面激励。
控制器根据车体状态和路面激励信息,调节悬架系统的刚度和阻尼,以实现车辆操控性和乘坐舒适性的优化。
PID控制策略PID控制器包括比例(P)、积分(I)和微分(D)三个部分。
比例部分用于根据当前误差调整输出控制信号,积分部分用于消除系统的稳态误差,微分部分用于根据误差变化率预测未来的误差变化趋势。
PID控制策略通过调节这三个参数,使系统稳定地达到期望状态。
动态仿真在SIMULINK平台上建立主动悬架系统的模型,并将PID控制器添加到模型中。
模型中的输入包括车体状态和路面激励,输出为控制器给悬架系统的控制信号。
通过对模型进行参数调节和仿真,可以了解PID控制策略对系统性能的影响,如系统的稳定性、跟踪性能和抗干扰能力。
在动态仿真中,首先通过设定一个具体的车体状态和一条路面激励,进行仿真。
根据输出的控制信号,调节悬架系统的刚度和阻尼,使车体保持稳定,并使乘坐舒适。
然后,可以通过改变PID控制器的参数,如比例、积分和微分参数,仿真不同的控制策略,比较不同控制策略下的系统性能差异。
结论通过动态仿真,可以评估主动悬架系统在不同PID控制策略下的性能。
PID控制策略可以通过调节参数,使系统快速稳定地达到期望状态,并具备良好的跟踪性能和抗干扰能力。
动态仿真为主动悬架系统的设计和优化提供了有效手段,可以帮助工程师更好地了解和掌握系统的特性。
运用Matlab/Simulink对主动悬架动力学仿真与分析摘要:基于主动悬架车辆1/4动力学模型,采用LQG最优调节器理论确定了主动悬架的最优控制方法,利用matlab软件建立了主动悬架汽车动力学仿真模型,并用某一车型数据进行了动力学分析和仿真,仿真输出量可作为评价主动悬架的控制方法和与平顺性有关的车辆结构参数的依据。
关键词:主动悬架仿真 MatlabDynamics Simulation Of Vehicle Active-suspension By Using MATLABAbstract: Linear-Quadratic-Gaussian(LQG) optional regulator theory is applied to optional control of active-suspension based on quarter vehicle dynamics model of active-suspension. Using MATLAB software,dynamics on model of vehicle of active-suspension is established to make analysis and simulation according to some actual data .Simulation output can be used to evaluate the control method of active-suspension and structure parameters of vehicle in relation to ride performance.Key words: active-suspension simulation MATLAB悬架作为现代汽车上重要的总成之一,对汽车的平顺性、操纵稳定性等有重要的影响,统的被动悬架虽然结构简单,但其结构参数无法随外界条件变化,因而极大的限制了悬架性能的提高。
汽车主动悬架系统建模及动力特性仿真分析对于汽车主动悬架系统建模和动力特性仿真分析,可以分为两个方面,即建模和仿真。
首先是汽车主动悬架系统的建模。
建模的目的是通过数学方程和物理模型来描述悬挂系统的运动和特性。
建模可以从两个方面入手,一是车辆运动模型,二是悬挂系统模型。
车辆运动模型是描述车辆整体运动的数学模型,它包括车辆的质心、惯性力、加速度等参数,并考虑到车辆在不同路面条件下的受力情况。
一般可以采用多自由度的运动方程来描述车辆的运动。
悬挂系统模型是描述悬挂系统特性的数学模型,它包括弹簧、阻尼、悬挂支架等组成部分,并考虑到悬挂系统的动力学特性,如频率响应、刚度、阻尼等参数。
根据悬挂系统的工作原理和设计参数,可以建立悬挂系统的数学模型。
其次是动力特性的仿真分析。
仿真分析的目的是通过数值计算和仿真模拟来模拟和预测悬挂系统在不同工况下的动力特性。
可以通过将建立的悬挂系统模型和车辆运动模型导入仿真软件中进行仿真分析。
动力特性的仿真分析包括四个方面:路面输入、悬挂系统响应、车辆运动和动力性能评估。
路面输入是指对车辆行驶过程中的路面输入进行模拟和预测,可以通过信号生成器生成不同频率、振幅和相位的路面输入信号。
悬挂系统响应是指悬挂系统对路面输入做出的响应。
可以通过差动方程、拉普拉斯变换等方法来求解悬挂系统的动态响应,并得到悬挂系统的频率响应曲线、阻尼比、刚度等参数。
车辆运动是指车辆在不同路面输入下的运动情况,包括车辆的加速度、速度、位移等参数。
可以通过对车辆运动模型进行数值计算和仿真模拟来模拟和预测车辆的运动情况。
动力性能评估是指对悬挂系统的性能进行评估和比较,可以通过对悬挂系统的频率响应、稳定性、舒适性等指标进行计算和分析,来评估悬挂系统的动力性能。
总的来说,汽车主动悬架系统的建模和动力特性仿真分析是一项复杂而又重要的任务,通过对悬挂系统的建模和仿真,可以帮助设计和优化悬挂系统,提高车辆的悬挂效果和驾驶舒适性。
基于S im u link的车辆主动悬架LQG控制器的设计周凯,韩振南【摘要】摘要:建立了二自由度1/4车体的数学模型,并利用线性最优化控制理论进行了汽车主动悬架的LQG控制器设计,并在Matlab/S imulink环境下进行仿真,结果表明具有LQG控制器的主动悬架对车辆行驶平稳性和乘坐舒适性有了很大的改善。
【期刊名称】汽车科技【年(卷),期】2010(000)002【总页数】3【关键词】LQG控制;主动悬架;Matlab/Simulink;仿真传统的悬架系统,由于其刚度和阻尼是固定的,所以其性能是不变的,也是无法进行调节的。
而在主动悬架系统中,刚度和阻尼特性能根据汽车的行驶条件进行动态调节,使悬架系统始终处于最佳减振状态,所以主动悬架是悬架发展的必然方向。
1 系统模型的建立1.1 车辆主动悬架动力学模型的建立为了便于研究,将汽车简化为二自由度1/4车体单轮模型,如图1所示。
根据牛顿第二定律,系统的运动方程如下:式中,m b为车体质量;m w为非簧载质量;x b为车体位移;x w为非簧载质量位移;x g为路面输入;K s为悬架刚度;K t为轮胎刚度;U a为控制力输入。
1.2 路面输入模型的建立在分析悬架系统动态性能时,路面输入模型的建立是一个非常重要的部分。
在本文中是利用白噪声经积分的方法产生路面输入模型。
当车速为定值时,速度时域功率谱即为白噪声信号,此时路面不平度位移可以写成时域表达的形式,即当路面为C级,即普通路面,路面不平度系数G0=256×10-6(m3/cycle),路面激励信号的方差n0=0.1,车速u=20 m/s时,利用Matlab/Simulink仿真构造出的随机路面轮廓如图2所示。
2 LQG控制器的设计在汽车悬架的设计中,主要的性能指标包括:代表乘坐舒适性的车身加速度;影响车身姿态且与结构设计和布置有关的悬架动行程;代表轮胎接地性的轮胎动载荷。
LQG控制设计中的目标性能指数J即为车身加速度、悬架动行程和轮胎动位移的加权平方和的积分值,表示如下:式中,q1、q2、q3分别为轮胎动位移、悬架动行程和车身垂向振动加速度的加权系数。
0引言车辆的安全性、操作稳定性及乘坐舒适性是车辆在行驶过程中非常重要的性能指标,而悬架系统作为车辆的重要部分,对其有重要的影响。
随着汽车技术的发展,车辆主动悬架慢慢地取代了被动悬架,而对于悬架控制器方面的设计也层出不穷。
常用的主动悬架的控制方法有自适应控制、模糊控制、神经网络智能控制及最优控制等,而最优控制作为现代控制理论的核心,理论基础最为完善。
通过线性最优控制算法,综合考虑悬架系统的各因素,设计一个半主动悬架最优控制策略,与被动悬架进行对比研究,从而起到对系统性能的改善。
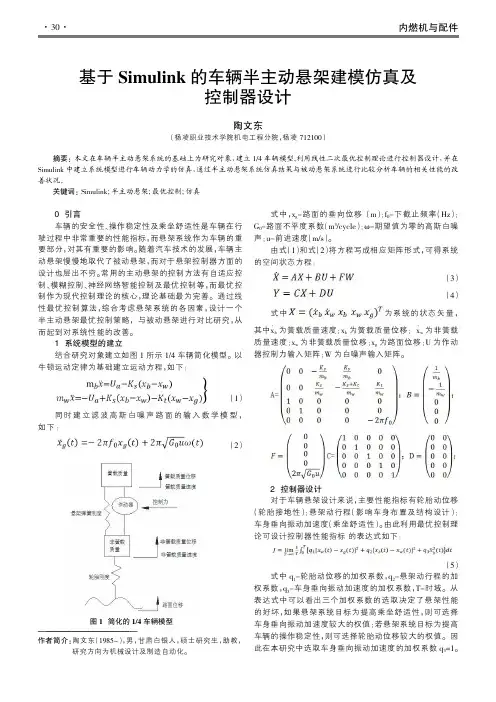
1系统模型的建立结合研究对象建立如图1所示1/4车辆简化模型。
以牛顿运动定律为基础建立运动方程,如下:(1)同时建立滤波高斯白噪声路面的输入数学模型,如下:(2)式中,x g -路面的垂向位移(m );f 0-下截止频率(Hz );G 0-路面不平度系数(m 3/cycle );ω-期望值为零的高斯白噪声;u-前进速度(m/s )。
由式(1)和式(2)将方程写成相应矩阵形式,可得系统的空间状态方程:(3)(4)式中为系统的状态矢量,其中x ̇b 为簧载质量速度;x b 为簧载质量位移;x ̇w 为非簧载质量速度;x w 为非簧载质量位移;x g 为路面位移;U 为作动器控制力输入矩阵;W为白噪声输入矩阵。
2控制器设计对于车辆悬架设计来说,主要性能指标有轮胎动位移(轮胎接地性);悬架动行程(影响车身布置及结构设计);车身垂向振动加速度(乘坐舒适性)。
由此利用最优控制理论可设计控制器性能指标的表达式如下:(5)式中q 1-轮胎动位移的加权系数,q 2-悬架动行程的加权系数,q 3-车身垂向振动加速度的加权系数,T-时域。
从表达式中可以看出三个加权系数的选取决定了悬架性能的好坏,如果悬架系统目标为提高乘坐舒适性,则可选择车身垂向振动加速度较大的权值;若悬架系统目标为提高车辆的操作稳定性,则可选择轮胎动位移较大的权值。
因此在本研究中选取车身垂向振动加速度的加权系数q 3=1。
汽车悬架建模与动态仿真研究的开题报告一、选题背景随着汽车工业的不断发展,车辆的悬架系统逐渐成为了汽车工程中一个重要的研究方向。
车辆悬架系统作为汽车与地面交互的接口部分,直接影响到车辆安全性、舒适性和动态性能等方面,被视为车辆的重要组成部分。
因此,研究汽车悬架的建模和动态仿真对于汽车工程的发展和提升具有十分重要的作用。
二、研究内容和研究目标本研究的主要内容是采用多体动力学理论,对汽车悬架系统进行建模,并进行动态仿真研究。
具体包括以下几个方面:1. 采用多体动力学理论建立汽车悬架系统的模型,包括车轮、车身、悬架弹簧、减震器等部分。
2. 对不同类型的汽车悬架系统进行建模和仿真研究,包括悬挂在轮轴上的悬架系统、双叉臂悬架系统等。
3. 分析不同路面条件下汽车悬架系统的动态响应和稳定性,以此评估汽车悬架系统的性能表现。
4. 针对不同的动态调节策略,研究汽车悬架系统的动态性能提升和燃油经济性优化等方面的效果。
通过以上研究,我们的目标是:1. 提高对汽车悬架系统性能的理解和认识,为车辆工程的发展提供理论基础和实践指导。
2. 探究汽车悬架系统在不同路面条件下的动态响应和稳定性,为智能悬架的研发提供理论基础。
济性,使汽车在行驶中更加平顺、安全和经济。
三、研究方法本研究采用多体动力学理论,使用ADAMS等仿真软件,对汽车悬架系统进行建模和仿真研究。
先通过对车辆的场景分析,确定待建模的悬挂方式,并建立车轮、车身、悬架弹簧、减震器等构件的运动学和动力学模型。
然后通过设定不同的路面力载荷进行仿真,探究汽车悬架系统在不同路况下的动态响应及其稳定性。
最后,根据仿真结果,进行系统性能评估和模型优化,为悬架系统的实际应用提供参考。
四、预期成果本研究预期取得的成果如下:1. 汽车悬架系统的多体动力学建模和仿真研究成果,包括悬挂在轮轴上的悬架系统、双叉臂悬架系统的建模及仿真结果。
2. 对汽车悬架系统性能的分析和评估,包括不同路面条件下的动态响应和稳定性分析。

运用Matlab/Simulink对主动悬架动力学仿真与分析摘要:基于主动悬架车辆1/4动力学模型,采用LQG最优调节器理论确定了主动悬架的最优控制方法,利用matlab软件建立了主动悬架汽车动力学仿真模型,并用某一车型数据进行了动力学分析和仿真,仿真输出量可作为评价主动悬架的控制方法和与平顺性有关的车辆结构参数的依据。
关键词:主动悬架仿真 MatlabDynamics Simulation Of Vehicle Active-suspension By Using MATLAB Abstract: Linear-Quadratic-Gaussian(LQG) optional regulator theory is applied to optional control of active-suspension based on quarter vehicle dynamics model of active-suspension. Using MATLAB software,dynamics on model of vehicle of active-suspension is established to make analysis and simulation according to some actual data .Simulation output can be used to evaluate the control method of active-suspension and structure parameters of vehicle in relation to ride performance.Key words: active-suspension simulation MATLAB悬架作为现代汽车上重要的总成之一,对汽车的平顺性、操纵稳定性等有重要的影响,统的被动悬架虽然结构简单,但其结构参数无法随外界条件变化,因而极大的限制了悬架性能的提高。
车辆悬架四分之一整车模型的Simulink建模与仿真车身质心加速度相对动载荷悬架动行程Simulink建模与仿真运用simulink 中的状态空间模型计算四分之一车模型的,ACC ,DTL 和SWS 。
首先运用吴志成老师一片文献的方法利用simulink 建立路面不平度模型,生成路面谱。
所运用的公式如下:q (t )=−0.111∗v ∗q (t )+0.111∗40∗√G q (n 0)∗v利用上述式子得出路面不平度生成如下所示:图1 路面谱生成因为选择的是E 级路面,40KM/h ,因此增益2和3分别为,11.1111和8.5333。
此外,限带白噪声功率的大小为白噪声的协方差与采样时间的乘积。
又白噪声W E (t)的协方差满足下式:E [w E (t )w E (t +τ)]=2ρ2αvδ(τ)此处δ(τ)为脉冲函数,并且选择采样时间为0.01s ,则计算可得白噪声功率为8.9*10-3。
计算的路面不平度均方根值为0.0531m 。
四分之一车模型根据拉格朗日方程有下式:状态空间模型:xb=z2 xw=z1 kt=k1 ks=k2 mb=m2 mw=m1 xr=u建立状态方程和输出方程,在此选取状态变量向量为:X =[z1,z2,z1,z2]′0)()(=-+-+w b s w b b b x x k x x C xM ()()()0w w w b s w b t w r x C x k x x k x x x M +-+-+-=输入向量为:u=[qt]′则输出向量为Y=[z2,z2,(z1−u)∗ktm2∗g,z2−z1]′建立如下的状态方程和输出方程:X=AX+BuY=CX+du 解得A,B,C,D分别为:A=[0010001−(k1+k2)/m1k2/m2k2/m1−k2/m2−c/m1c/m1c/m2−c2/m2]B=[0 0 k1m10]′C=[k2m2 −k2m2cm2−cm2; 0 1 0 0;k1m2g0 0 0;−1 1 0 0]D=[0 0−k1m2g0]′将各个已知量代入即可得出具体的矩阵。

车辆悬架四分之一整车模型得Simulink建模与仿真车身质心加速度相对动载荷悬架动行程Simulink建模与仿真运用simulink中得状态空间模型计算四分之一车模型得,ACC,DTL与SWS。
首先运用吴志成老师一片文献得方法利用simulink建立路面不平度模型,生成路面谱。
所运用得公式如下:ﻫ利用上述式子得出路面不平度生成如下所示:图1路面谱生成因为选择得就是E级路面,40KM/h,因此增益2与3分别为,11、1111与8、5333。
此外,限带白噪声功率得大小为白噪声得协方差与采样时间得乘积。
又白噪声WE(t)得协方差满足下式:此处为脉冲函数,并且选择采样时间为0、01s,则计算可得白噪声功率为8、9*10-3。
计算得路面不平度均方根值为0、0531m。
四分之一车模型根据拉格朗日方程有下式:状态空间模型:xb=z2xw=z1 kt=k1ks=k2 mb=m2mw=m1 xr=u 建立状态方程与输出方程,在此选取状态变量向量为:输入向量为:则输出向量为建立如下得状态方程与输出方程:解得A,B,C,D分别为:将各个已知量代入即可得出具体得矩阵。
从而有下面得simulink仿真:图2 simulink仿真模型图3 车身质心垂直加速度时域特性图(ACC)ACC得均方根值为3、99ms-2。
Acc得功率谱密度:运用[pxx,m]=psd(ddz2,512,100);plot(m,pxx)xlabel('频率/Hz')ylabel('功率谱密度/(ms-2)^2/Hz')title('acc功率谱密度')图形如下:图4车身质心加速度功率谱密度图5车身质心位移得时域特性曲线Z2得均方根值为0、0587m、图6 相对动载荷得时域特性均方根值为0、7464还就是运用上面得式子计算相对动载荷得功率谱密度:得图如下图7相对动载荷功率谱密度图8悬架动行程得时域特性均方根值为0、0316m悬架动行程得功率谱密度如下图:图9 悬架动行程功率谱密度不同阻尼比与固有频率对上述几个值得影响:程序如下:得到得图形如下:图10 阻尼比,固有频率对车身加速度得影响图11阻尼比,固有频率对相对动载荷得影响图12 阻尼比,固有频率对悬架动行程得影响。
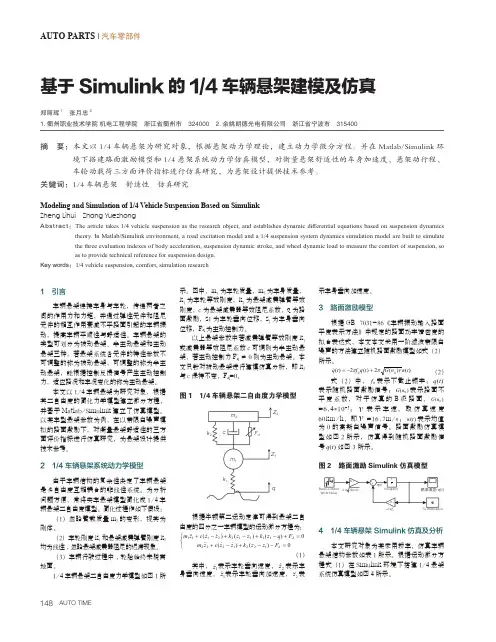
AUTO PARTS | 汽车零部件基于Simulink的1/4车辆悬架建模及仿真郑丽辉1 张月忠21.衢州职业技术学院 机电工程学院 浙江省衢州市 3240002.余姚朗德光电有限公司 浙江省宁波市 315400摘 要: 本文以1/4车辆悬架为研究对象,根据悬架动力学理论,建立动力学微分方程。
并在Matlab/Simulink环境下搭建路面激励模型和1/4悬架系统动力学仿真模型,对衡量悬架舒适性的车身加速度、悬架动行程、车轮动载荷三方面评价指标进行仿真研究,为悬架设计提供技术参考。
关键词:1/4车辆悬架 舒适性 仿真研究1 引言车辆悬架连接车身与车轮,传递两者之间的作用力和力矩,并通过弹性元件和阻尼元件的相互作用衰减不平路面引起的车辆振动,提高车辆平顺性与舒适性。
车辆悬架的类型可划分为被动悬架、半主动悬架和主动悬架三种,若悬架系统各元件的特性参数不可调整的称为被动悬架,可调整的称为半主动悬架,能根据控制反馈信号产生主动控制力,适应路况和车况变化的称为主动悬架。
本文以1/4车辆悬架为研究对象,根据其二自由度的简化力学模型建立微分方程,并基于Matlab/Simulink建立了仿真模型。
以某车型悬架参数为例,在以带限白噪声模拟的路面激励下,对衡量悬架舒适性的三方面评价指标进行仿真研究,为悬架设计提供技术参考。
2 1/4车辆悬架系统动力学模型由于车辆结构的复杂性决定了车辆悬架是多自由度互相耦合的非线性系统。
为分析问题方便,常将实车悬架模型简化成1/4车辆悬架二自由度模型。
简化过程作如下假设:(1)忽略簧载质量m2的变形,视其为刚体。
(2)车轮刚度k1和悬架减震弹簧刚度k2均为线性,忽略悬架减震器阻尼的迟滞现象。
(3)车辆行驶过程中,轮胎始终未脱离地面。
1/4车辆悬架二自由度力学模型如图1所示。
图中,m1为车轮质量,m2为车身质量,k1为车轮等效刚度,k2为悬架减震弹簧等效刚度,c为悬架减震器等效阻尼系数,q为路面激励,z1为车轮垂向位移,z2为车身垂向位移,Fd为主动控制力。
基于SIMULINK的主动悬架控制器建模与仿真摘要:悬架对于车辆的平顺性、操稳性和安全性等都有着重要的影响。
悬架对车身的垂向振动加速度的影响是悬架设计研究的重点。
本文在分析主动悬架的各种控制方法后,采用二自由度1/4单轮车辆模型和线性二次型Gauss(LQG)控制方法建立计算机模型在Matlab/Simulink中进行集成优化仿真。
从仿真结果分析主动悬架显著地降低了车身的垂向振动加速度,对改善汽车行驶平顺性和提高汽车行驶安全性具有较优的效果。
关键词:主动悬架;单轮模型;LQG控制;SimulinkModeling and Simulation of active suspension controller based onSIMULINKLiu Dexiong( College of engineering and technology,Southwestern University, Chongqing 404100 )Abstract:Suspension for vehicle ride comfort, handling stability and security have important influence. Suspension on the body of the effect of vertical vibration acceleration is the research focus of suspension design. In this paper, in various analysis of active suspension control methods, with two degrees of freedom and 1 / 4 single wheel vehicle model and linear two Gauss (LQG) control method to establish a computer model of integrated optimization simulation in Matlab/Simulink. From the analysis of simulation results of active suspension significantly reduces the body's vertical vibration acceleration, to improve vehicle ride comfort and improve vehicle safety and has better effectiveness.Key words:Active suspension; single wheel model; LQG control; Simulink0引言悬架系统是车辆的重要部件,对于车辆的平顺性、操稳性和安全性等都有着重要的影响,而主动悬架是悬架发展的必然方向。
作业任务包括:一、建立前轮角阶跃输入的汽车三自由度操控模型,并且参数可调。
二、绘制六面体并实现对六面体的三维操作,包括平移、旋转、缩放等。
三、动画:本文动画的实现是在对六面体的具体操作过程(平移、旋转、缩放)中表现。
四、GUI与simulink的联合仿真,并将所有作业内容集成到GUI界面,将程序进行编译,打包生exe的成可执行文件。
汽车三自由度操控模型1.1建模假设:•1、汽车车速不变。
•2、不考虑切向力对轮胎特性的影响。
•3、侧向加速度不大于0.3-0.4g 。
•4、前轮转角不大,不考虑前轮左右的区别。
•5、不考虑非悬架质量的倾角。
•6、不考虑空气动力作用。
•7、侧倾中心与非悬架质心等高,前后一样。
•8、左右对称。
假设汽车的结构:•前面是独立悬架。
•后面是纵置半椭圆板簧。
•车厢侧倾引起:前轮外倾角变化;后轴发生轴转向;左右侧车轮载荷重新分配引起滚动阻力不相等而产生绕Z轴的力矩。
1.2汽车模型受力分析车辆坐标系如图1所示图1 车辆坐标系M、Ms、Mu分别是整车、悬挂和非悬挂质量,M=Ms、Mu其质心分别是c.g. 、s和u。
如图二所示图2 车辆质量分布示意图汽车三自由度模型的三个自由度指:汽车沿y 轴平动的自由度、汽车绕z 轴的转动自由度、汽车绕x 轴的转动自由度。
一般分别用横向速度v 、横摆角速度r 、侧倾角φ来表征。
汽车三自由度模型的微分方程为:()()s r z xz r p s x xz s p M v rV M h Y Y r Y Y I r I N N r N N N p I I r M h v rV L L βφδβφδφφβφδφβφδφφφ⎫++=+++⎪-=++++⎬⎪-++=+⎭(1-1)其中各个参数的意义如下:算子说明:21k k Y +=β ()211bk ak VY r -=122Y Y Y k φαφφ∂∂=-∂∂ 其中:11YY γ∂∂前轮外倾刚度;1γφ∂∂侧倾外倾角系数;2αφ∂∂后轴侧倾转向系数。
基于SIMULINK悬架系统动力学仿真分析悬挂系统是车辆动力学中非常关键的一个部分,它对提高汽车的行驶稳定性和乘坐舒适性有着重要的作用。
在汽车设计和开发过程中,悬挂系统的性能评估通常需要进行系统动力学仿真分析。
基于SIMULINK的悬挂系统动力学仿真分析可以有效地预测和评估悬挂系统在不同工况下的性能。
悬挂系统的主要任务是将车轮与车身连接起来,同时能够减少路面不平度对车身的影响。
在悬挂系统中,主要包括弹簧、减震器和悬挂杆等组成部分。
弹簧起到支撑车身和保持车轮与路面接触的作用,减震器则用于消除车身由路面不平度引起的振动,并提供对车身姿态的控制。
悬挂杆则用于连结车轮与车身。
在进行悬挂系统动力学仿真分析前,需要首先确定悬挂系统的参数,包括弹簧刚度、减震器阻尼、悬挂杆刚度等。
这些参数可以通过实验或者模型计算得到。
在悬挂系统分析时,可以考虑不同工况下的路面激励,例如障碍物冲击、转向、加速和刹车等。
在SIMULINK中建立悬挂系统的动力学模型时,主要考虑以下几个方面:1.悬挂系统的约束条件:悬挂系统在运动中要满足一定的约束条件,例如车轮与车身的相对运动不能脱离一定范围。
在模型中,可以使用约束块来实现这些约束条件。
2.路面输入信号:通常通过使用数字信号发生器模块产生路面输入信号,可以根据需要设置不同的路面类型和激励频率。
3.悬挂系统参数模型:根据实际悬挂系统的参数,建立相应的数学模型。
可以使用传输函数模块来表示弹簧和减震器的特性,使用刚度和阻尼系数来描述。
4.车辆模型:悬挂系统是车身和车轮之间的连接,因此需要建立车辆模型。
可以使用多体模块来建立车身和车轮的动力学关系,并考虑其质量、惯性矩阵和阻尼系数等参数。
5.结果分析和评估:仿真完成后,可以通过对输出信号进行分析来评估悬挂系统的性能。
常见的性能指标包括车辆的悬挂系统响应、抗滚动性能和路面舒适性等。
总之,基于SIMULINK的悬挂系统动力学仿真分析可以为悬挂系统的设计和优化提供重要的参考。
2010年第4期农业装备与车辆工程图1双轴悬架四自由度平面振动模型doi :10.3969/j.issn.1673-3142.2010.04.007基于Simulink 的汽车双轴悬架动态仿真分析唐天德(绵阳职业技术学院,四川绵阳621000)摘要:建立了研究车身垂直振动与纵向角振动的四自由度汽车双轴悬架动力学模型及其Simulink 仿真模型,提出了一种通过分析Simulink 时域仿真数据求解前后悬架幅频特性不同、悬挂质量分配系数不等于1的汽车一般双轴悬架模型双输入下折算幅频特性的方法。
通过此方法可方便地求出车身纵轴上任一点垂直振动加速度和车身俯仰角加速度等对前轮路面不平度输入的幅频特性,从而进一步研究悬架的各种参数对悬架动态特性的影响。
关键词:汽车;双轴悬架;仿真;频率响应中图分类号:U461.4文献标识码:A文章编号:1673-3142(2010)04-0024-05Analysis of the Dynamic Simulation of Automobile Dual Suspension Based on SimulinkT ANG Tian-de(Mia ny ang Vocational and Technical College,Mia y ang 621000,China)Abstrac t :The four-DOF automobile dynamic model and its dual-axis suspension Simulink model are established for researching the vehicle body vertical vibration and longitudinal angular vibration,a method is presented to obtain the two-input amplitude-frequency characteristics of the automobile general dual suspension model which the amplitude-frequency characteristics of the front and rear suspensions are different and the distribution coefficient of the mass suspension is not equal to one by analyzing the data of time-domain simulation of Simulink.By using this method,the amplitude-frequency characteristics by the front input of road surface roughness of vertical acceleration of any point on vehicle body and the rotary acceleration of vehicle body are conveniently obtained,and thus the effects of various parameters of suspension on the suspension Dynamic characteristics are easier to be studied.Keywords :automobile ;dual-axis suspension ;simulation ;frequency-response1引言悬架系统是车辆主要的减振、隔振装置,其性能的优劣与匹配的合理性,对车辆行驶平顺性与乘坐舒适性具有决定性影响,也是限制汽车最大车速的主要因素之一。