船舶六自由度解析图
- 格式:doc
- 大小:723.50 KB
- 文档页数:1

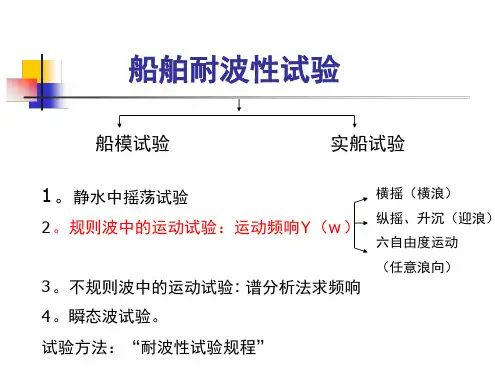
船舶拖航系统六自由度操纵运动仿真船舶拖航系统六自由度操纵运动仿真船舶拖航系统是一种重要的海上运输设备,在海上货物运输中起到了非常关键的作用,而如何提高船舶拖航系统的操控能力是当前研究的热点。
船舶拖航系统的操纵运动仿真是一种非常有效的工具,可以模拟出各种不同的船舶拖航运动,对于提高系统的操纵能力具有重要意义。
船舶拖航系统的六自由度操纵运动是指在三个轴向分别进行平移和旋转的运动。
这六个自由度是:横向平移、纵向平移、垂直平移、绕X轴旋转、绕Y轴旋转和绕Z轴旋转。
在实际操作中,船舶拖航系统的操纵运动非常复杂,需要通过软件仿真来模拟出各种不同情况下的运动模式。
实现船舶拖航系统六自由度操纵运动仿真需要使用专业的仿真软件,如MATLAB/Simulink、ADAMS等。
这些软件具有良好的仿真性能和精度,可以精确地模拟出船舶拖航系统的各个运动指标。
以MATLAB/Simulink为例,其基于多体动力学理论,可以对船舶拖航系统进行六自由度动力学仿真,包括运动方程、力学方程和动力学方程等。
在进行船舶拖航系统六自由度操纵运动仿真时,需要考虑各种常见因素,并对其进行参数设置。
通常需要设置船舶的结构参数、物理参数、环境参数和控制参数等,以便精确地进行仿真分析。
其中结构参数包括船舶的长、宽、高等尺寸信息;物理参数包括船舶的质量、重心、惯性矩等;环境参数包括海洋水流、波浪等外部环境影响;控制参数包括船舶的操纵系统和控制策略等。
在仿真系统中,可以使用多种不同的仿真模式,如驱动模式、跟踪模式和预演模式等。
驱动模式是指在实际操纵情况下,通过对船舶各项指令进行控制,模拟出其对应的运动模式。
跟踪模式是指模拟出船舶跟随目标物体进行拖航操作的情况。
预演模式是指在不同环境条件下,模拟出船舶在某些特殊情况下的运动模式,以便用于系统优化和改进等方面。
总之,船舶拖航系统六自由度操纵运动仿真是一种非常重要的技术手段,对于提高船舶拖航系统的操纵能力具有重要意义。
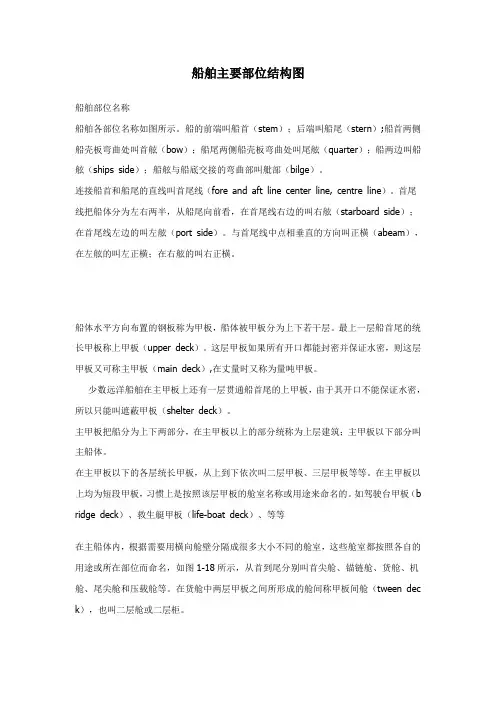
船舶主要部位结构图船舶部位名称船舶各部位名称如图所示。
船的前端叫船首(stem);后端叫船尾(stern);船首两侧船壳板弯曲处叫首舷(bow);船尾两侧船壳板弯曲处叫尾舷(quarter);船两边叫船舷(ships side);船舷与船底交接的弯曲部叫舭部(bilge)。
连接船首和船尾的直线叫首尾线(fore and aft line center line, centre line)。
首尾线把船体分为左右两半,从船尾向前看,在首尾线右边的叫右舷(starboard side);在首尾线左边的叫左舷(port side)。
与首尾线中点相垂直的方向叫正横(abeam),在左舷的叫左正横;在右舷的叫右正横。
船体水平方向布置的钢板称为甲板,船体被甲板分为上下若干层。
最上一层船首尾的统长甲板称上甲板(upper deck)。
这层甲板如果所有开口都能封密并保证水密,则这层甲板又可称主甲板(main deck),在丈量时又称为量吨甲板。
少数远洋船舶在主甲板上还有一层贯通船首尾的上甲板,由于其开口不能保证水密,所以只能叫遮蔽甲板(shelter deck)。
主甲板把船分为上下两部分,在主甲板以上的部分统称为上层建筑;主甲板以下部分叫主船体。
在主甲板以下的各层统长甲板,从上到下依次叫二层甲板、三层甲板等等。
在主甲板以上均为短段甲板,习惯上是按照该层甲板的舱室名称或用途来命名的。
如驾驶台甲板(b ridge deck)、救生艇甲板(life-boat deck)、等等在主船体内,根据需要用横向舱壁分隔成很多大小不同的舱室,这些舱室都按照各自的用途或所在部位而命名,如图1-18所示,从首到尾分别叫首尖舱、锚链舱、货舱、机舱、尾尖舱和压载舱等。
在货舱中两层甲板之间所形成的舱间称甲板间舱(tween dec k),也叫二层舱或二层柜。
看来这是以前设计的船,现在的船机舱基本在尾部。
中机型的效率不太好。
船舶部位、尺度和标志一、船舶各部位及舱室名称有关概念船首(head):船的前端部位。
船舶操纵系统第一节 操纵系统概述为了满足船舶在各种工况下的航行需要,将船舶主机的起动、换向和调速等各装置联结成一个统一整体,并可集中控制的所有机构、设备和管路,总称为柴油机推进装置的操纵系统。
小型柴油机的推进装置,其起动、调速及换向系统的控制件距离近,通常分别设置,各自操纵。
近年来不少船舶也通过机械、气动等型式传输集中至机舱集控台或驾驶室,对推进装置集中操纵。
大、中型柴油机为操纵方便和工作可靠,都将各控制部分通过各种方式有机地联系以便集中控制和远程控制。
随着自动化技术和电子技术的发展,各种遥控技术已广泛地应用于柴油机的操纵机构。
特别是近年来电子计算机技术和微处理机已用于主机遥控、巡回检测和工况监视等方面,不仅大大减轻了轮机人员的劳动强度,改善了工作条件,还可以避免人为的操作差错,提高船舶运行的安全性、操纵性和经济性。
目前,主机遥控技术水平越来越高,船舶正朝着全面自动化和智能化的方向发展。
一、对操纵系统的要求在船舶柴油机中,操纵部分是最复杂的一部分,其部件多、零件杂、相互牵连制约,近代自动化技术和遥控技术在操纵系统的应用,更增加了操纵系统的复杂程度。
为了保证操纵系统能够可靠地工作,对船舶柴油机的操纵系统有下列基本要求:(1)必须能迅速而准确地执行起动、换向、变速和超速保护等动作,并能满足船舶规范上相应的要求。
(2)具有必要的连锁装置,以避免操作差错而造成事故。
起动连锁装置:盘车机未脱开不能起动,换向未到位不能起动。
换向连锁装置:转向与要求不符时不能起动,不允许在较高转速下换向,运转过程中不能自行换向。
滑油保安连锁装置:当滑油压力下降至许用下限值时,将油量调节杆推至零油位,使柴油机自行熄火停车。
(3)必须设有必要的监视仪表和安全保护、报警装置。
在操纵台(或遥控操纵台)上有转速、转向、气压、油压、水温等醒目的仪表,并对直接影响安全运行的有关压力和温度等置有报警装置和安全保护装置。
(4)操纵机构中的零部件必须灵活、可靠、不易损坏。
船舶图解大词典第1章船舶设计1.1船长1)总长L oa:length of overall2)垂线间长L bp:length between perpendiculars [[pE:pEn’dikjulE]] 3)登记船长L:registered length4)干舷长L f:freeboard length5)船舶分舱长度L S:subdivision length6)艉垂线:aft perpendicular7)艏垂线:forward perpendicular8)后端点:aft end point9)挪威规范,英国规范:Oslo Rules, UK Rules10)前端点:fore end point11)美国规范:USA Rules12)艏楼甲板:F’cle Dk13)日本规范: Japanese Rules14)艏柱:stem15)水线长:length of water line16)干舷长前端点: forward end of freeboard length1.2 船宽1)登记船宽B:registered breadth2)上甲板Upp Deck3)角隅圆弧的断点:termination of corner radius4)干舷船宽B f : breadth of ship for freeboard5)分舱船宽B s : subdivision breadth of ship1.3 型深(D)depth1.4 吃水d: draught or draft1.5 干舷: freeboard1.6 吨位及舱容tonnage and cargo capacity总吨gross tonnage 净吨net tonnage苏伊士运河吨位Suez Canal tonnage巴拿马运河吨位Panama Canal tonnage排水量displacement载重吨deadweight 国家吨位national tonnage 国际吨位international tonnage包装货物舱容bale capacity 谷物舱容grain capacity外板shell plating 护肋材sparring谷物容积限度grain capacity 捆包容积限度limit of bale capacityg表示谷物容积g indicates grain capacity b表示捆包容积 b indicates bale capacity底部垫木bottom ceiling1.7船速speed1.8 船型系数block coefficient [kEui’fiFEnt]细长型fine form 肥大型full form 方形系数block coefficient (C b)中横剖面系数midship coefficient (C m)棱形系数prismatic coefficient (C p) [priz’mAtik]水线面系数water plane coefficient (C w)1.9描述船舶动态及静态的词汇terms to describe the dynamic[dai’nAmik]conditions and static positions纵倾trim 艉翘trim by stern 艏翘trim by head无纵倾状态even keel (non-trimmed condition)横倾heel or list 船体运动ship motion横摇rolling纵摇pitching艏摇yawing垂荡heaving横荡swaying纵荡surging1.10描述船体构件受力及变形的词汇describe the movement of hull structural member弯曲bending 扭曲twisting 屈曲buckling振动vibration 剪切sheering 横摇rolling 强摇racking1.11其他基本词汇(1)1)左舷port side 2) 右舷starboard side3) 纵向longitudinal [lCndVitju:dinl] 4) 横向transverse5) 水平horizontal [hCri’zCntl] 6) 垂直vertical 7) 中心线centre line (CL &)8) 舯midship or amidships (expressed by symbol)9) 船中区域midship part (0.4L ~ 0.5L)10) 船首bow 11) 艏柱stem 12) 艏部bow part or fore part13) 艏垂线fore perpendicular (FP)14) 艉柱stern 15) 艉部stern part or aft part16) 艉垂线aft perpendicular (AP)17) 尾端ends: these normally signify the end parts of the hull of a ship with 0.1L通常是指自船尾端始的0.1L的范围18) 基线base line (BL): normally the keel line 通常是指龙骨线19) 肋骨间距frame space 20) 肋骨线frame line21) 船体围长girth length: the length measured at the transverse sectionof the hull of a ship from gunnel to gunnel 在船体横截面上从一侧的船舷上沿量取到另一侧的船舷上沿的距离22) 龙骨上面top of keel 23) 折角线knuckle line (KL) 24) 折角点knuckle point25) 舷弧sheer 26) 艏舷弧fore sheer 27) 艉舷弧aft sheer 28)梁拱camber29)甲板内倾tumble home 30) 外飘flare31)舭部升高rise of floor 32)平行部parallel part1.12其他基本词汇(2)1) 船桥甲板上缘top of bridge deck beam 2) 船桥楼外缘outline of bridge enclosure3) 上甲板梁上缘top of upper deck beam 4)梁拱camber5) 主甲板的内倾tumble home at upper deck6) 船桥甲板的内倾tumble home at bridge deck7) 上甲板边upper deck at side 8) 船中心线centre line of ship9) 舭部bilge part 10) 平板龙骨的一半half-side dimension of flat portion at keel11) 船中船桥甲板的型深moulded depth to bridge deck12) 船中主甲板处的型深moulded depth to upper deck13) 船中型吃水moulded draught1.13 线型lines1) 横剖线图body plan 2) 纵剖线图profile or sheer plan 3)半宽图水线half-breadth plan1.14其他图纸文件other plans and documents1) 除线型图之外,下列图纸被称为关键图(key plans):总体布置图general arrangement 中横剖面图midship section钢材构造图construction profile 外板展开图shell expansion2) 其他关键图以外的船体图纸被称为船厂图(yard plan):(1) 船体方面艏柱、艉柱、螺旋桨柱和舵结构stem, stern frame, propeller post and rudder甲板结构图deck plans 单底、双底结构图single bottom and double bottom水密和油密舱壁结构图watertight and oil tight bulkheads上层建筑端壁图superstructure end bulkhead船首、船尾、船底部抗拍击结构图arrangement to resist panting in both peaks and their vicinity [vi’siniti] 邻近, 接近支柱和甲板纵桁图pillars and deck girders 轴隧图shaft tunnels锅炉、主机、推力轴承、中间轴承、发电机和其它重要辅机基座图Seating of boiler, engine, thrust and plummer blocks dynamos [‘dainEmEu] 发电机机舱棚图machinery casings长甲板室结构图long deckhouse桅杆、桅室和绞车平台结构图masts and mast houses and winch platforms泵布置图pumping arrangements甲板装原木时绑扎装置布置图timber deck cargo security arrangements防火构造图construction for fire protection消防布置图plans showing fire extinguishing arrangement逃生路径布置图plans showing escape routes舱室路径图plans showing arrangement for access of tank and space(2) 轮机方面机器处所布置图machinery arrangement of machinery space船内通讯系统图diagram for internal communication system主、辅机图main and auxiliary engines动力传动齿轮、轴系及螺旋桨图power transmission gears, shafting and propellers锅炉及压力容器图boiler and pressure vessel辅机和管系图auxiliary machinery and piping操舵装置图steering gear自动控制及遥控装置图automatic and remote controls备件spare part 电气装置electrical installations 船桥视界navigation bridge visibility(3) 其他图纸文件船体轮机设计说明书specifications for hull and machinery船中横剖面模数计算书calculation sheets for minimum athwartship[E’θwC:tFip] (横越) section modulus[‘mCdjulEs] (模数) in way of the midship part防腐式样书corrosion prevention scheme 稳性计算书stability calculation sheets破舱稳性计算书damage stability calculation sheets装载手册loading manual 绑扎手册security manual1.15 静水力曲线hydrostatic curves浮心距基线高度centre of buoyancy[`bRIEnsI] above base line (KB)浮心距船中centre of buoyancy from midship (B)漂心距船中centre of floatation from midship (F)每厘米吃水吨数tons per one centimeter immersion (TPC)每厘米纵倾力矩moment to change one centimeter (CTM)水线系数water plane coefficient (Cw)纵稳心距基线高longitudinal metacentre above base line (LKM)横稳心距基线高transverse metacentre above base line (KM)棱形系数prismatic[priz’mAtik]coefficient (Cp)垂直棱形系数vertical prismatic coefficient (Cvp)方形系数block coefficient (Cb)型排水量displacement in tons excluding appendages [E’pendidV] (附件,附属物)总排水量displacement in tons including appendages船体湿表面面积wetted surface area (W.S.)1.16 稳性stability1)静态稳性intact stability 2)动态稳性dynamic stability3)稳性判据stability criteria (标准)4)稳性曲线stability curves 5)倾斜试验inclining test 6)重心高度KG (height of centre of gravity)7)稳心高度KM (height of metacentre)8)初稳性高度GM 9)静稳性力臂GZ10)自由液面的影响free water effect11)大倾角稳性stability at a large inclination angle12)稳性十字曲线cross curves of stability13)纵向稳性longitudinal stability 14)横向稳性transverse stability 15)破舱稳性damage stability 16)浸水计算flooding calculation 17)浸水概率flooding probability 18)分舱compartment19)生存条件survival requirement 20)最终状态final stage21)生存概率survival probability 22)分舱指数subdivision index 23)处所渗透率permeability of a space24)许用GM0曲线permissible GM0 curve1.17 波浪wave斯托克波stokes wave 正弦波sine wave 摆动波trochoidal wave 船行波wave generated by ship sailing 散波divergent[dai’vE:dVEnt]wave船尾横波stern transverse eave 船首横波bow transverse wave 1.18 船体强度strength of ship船体垂向弯曲最终强度vertical bending ultimate strength船体梁强度hull girder strength 纵向强度longitudinal strength纵向弯距longitudinal bending moment 剪切力sheering force中拱hogging 中垂sagging静水弯距longitudinal bending moment in still water (Ms)波浪弯矩Mw(+) and Mw (-) wave induced longitudinal bending moment横向强度transverse strength 扭转强度twisting strength局部强度local strength 失稳强度buckling strength受压失稳强度compressive buckling strength剪切失稳强度sheer buckling strength直接强度计算/分析direct strength calculation / analyzing疲劳强度fatigue [fE’ti:g]strength疲劳强度解析、评价fatigue strength anlyze, assessment应力集中stress concentration [kCnsen’treiFEn]波浪周期wave period 随浪following wave 顶浪heading sea 横浪beam wave波浪载荷wave load 垂向波浪弯距vertical wave bending moment波浪变动压hydrodynamic [‘haidrEudai’nAmik] (水力,流体动力学)pressure舱室内压internal pressure 许用应力allowable [E’lauEbl]stress最小弯距Wmin 剖面模数section modulus惯性矩moment of inertia [I’nE:FjE]强度连续性continuity [kCnti’nju(:)iti]of strength 板架、板单元plate panel1.19 船体尺寸限制Panama [pAnE’m a:] 圣。
并联六自由度运动平台1.概述并联六自由度运动平台通过六个驱动缸(伺服缸或电动缸)的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(包括垂直、水平、横向、俯仰、侧倾和旋转六个自由度的运动),以及这些自由度的复合运动。
并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、及卫星、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真等。
图0-1:六自由度及其坐标系定义图我公司通过自行设计、安装调试,并开发控制软件,同时采用进口关键件对并联六自由度运动平台进行研究开发,目前已完成多套六自由度运动平台应用,典型应用有列车风档液压仿真试验台、F1国际赛车运动仿真台、汽车驾驶模拟器、飞机和飞碟运动模拟器、振动谱试验、海浪模拟试验等。
六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,是液压及控制技术领域的顶级产品。
2.系统组成2.1液压伺服类典型的液压式并联六自由度运动平台主要由机械系统、液压系统、控制系统硬件和控制系统软件四部分组成。
机械系统主要包括:承载平台、上下连接铰链、固定座。
液压系统主要包括:泵站系统、伺服阀、驱动器、伺服油缸和阀块管路。
控制系统硬件主要包括:实时处理器、伺服控制单元、信号调理单元、监控单元和泵站控制单元。
控制系统软件包括:实时信号处理单元、实时运算单元、伺服控制和特殊要求处理单元。
2.2电动伺服类电动式并联六自由度运动平台则将伺服油缸用电动缸代替,而伺服阀、泵站系统及阀块管路等则相应取消,增加运动控制单元。
具有系统简洁、响应速度快等优点,是多自由度平台今后重点发展的方向。
3.主要技术参数以下参数为液压类平台典型值,具体可按用户要求设计制造。
3.1平台主要参数平台最大负载:静态≥2000KG,动态≥3000KG。
船舶动态定位系统简介Introduction to DP 1 - IntroductionDynamic positioning (DP) is a rapidly maturing technology, having been born of necessity as a result of the increasing demands of the rapidly expanding oil and gas exploration industry in the 1960s and early 1970s. Even now, when there exist over 1,000 DP-capable vessels, the majority of them are operationally related to the exploration or exploitation of oil and gas reserves.动态定位系统是一个快速成熟的技术。
是基于1960年代到70年代油气勘探工业的需求的基础上产生的。
目前已经有超过1000艘以上的动态定位的船舶,其中绝大部分都后油气勘探有关。
The demands of the offshore oil and gas industry have brought about a whole new set of requirements. Further to this, the more recent moves into deeper waters and harsh-environment locations, together with the requirement to consider more environmental-friendly methods, has brought about the great development in the area of Dynamic Positioning techniques and technology.油气工业的需求给我们带来了一个全新的需求。
最近许多船迷都在开工,或多或少对型线图感起了兴趣,就此随便谈谈。
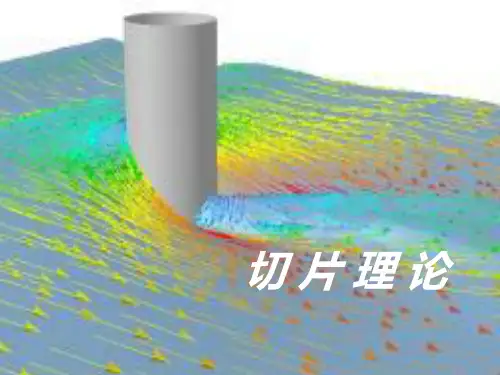
型线图又称线型图,也就是表达船体的外表面几何形状的图纸。
a.设想用垂直于船体纵轴且垂直于底平面的剖切面将船体切开,该剖切面与与船体的交线就称为横剖线。
在船长1/2处得到的横剖线为中(舯)横剖面线,通常在左、右视图上绘出。
在生产图纸上经常将它绘在主视图的中段;b.设想用水平的剖切面去切船体得到的交线就称为水线,通常在主视图上绘出;c.设想用平行于船体纵轴且垂直于底平面的剖切面将船体切开,得到的交线被称为纵剖线,通常在俯视图上绘出。
参见下图:(请点击图片放大看)对于船模爱好者应注意如下几点:1.型线图的外形未减去船壳材料的厚度,在制造肋板时应将这一厚度减去,包括甲板的厚度也要减去;2.对应的剖面(肋板)在另外的视图上有固定的位置,不可改变,当位置改变时,形状就变了。
因此我们在固定肋板时,一定要准确;3.船体表面变化率大的位置上要多布置肋板。
同样,在船壳材料较软的情况下也应如此。
下图是港内“内河交通艇”的型线工作图,为了让大家看清楚,已作删除。
有兴趣的爱好者可以看看:-------------------------------------船模基础知识(一)补:型线图的补画法-------------------------------------在型线图的讨论中,大家希望了解在有了横断面的型线图的情况下,如何补出纵剖线和水平剖线。
由于没有找到适合的材料,就抽时间以港内的《内河交通艇》为例,画了一个步骤图:这里要说明的是我用来做依据的型线图是已经经过校准的,细心的朋友如果用它与图纸上提供的型线图对比,就会发现差别。
如果原图不太准,那么得到的纵剖线、水平剖线就不流畅,甚至明显的异常弯曲。
人工校准是一件非常繁复的事,因为在一个视图上移动一个点,另两个视图上的对应点也要相应移动,曲线也要变化。
因此过去在船厂里校准工作往往由对船型有研究的,并已积累较多经验的技术人员来进行。