8第四章 机器人本体基本结构(1)
- 格式:ppt
- 大小:9.07 MB
- 文档页数:62
工业机器人本体的基本组成
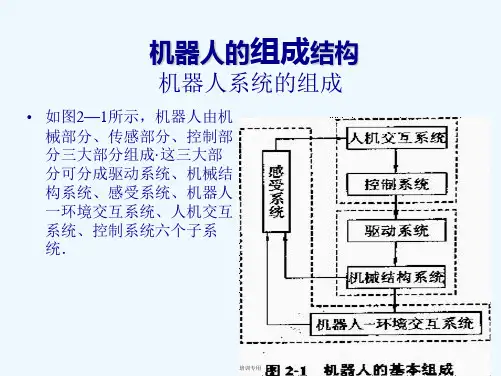
工业机器人本体的基本组成通常包括以下几个部分:
1. 机械结构:这是机器人的主体框架,包括底座、腰部、臂部、腕部和末端执行器等组成部分。
机械结构的设计需要考虑到机器人的负载能力、运动范围、精度要求等因素。
2. 驱动系统:驱动系统是为机器人提供动力的关键组件,它可以根据需要调节机器人的运动速度和方向。
常见的驱动方式有电动、液压、气压和伺服电机等。
3. 传感系统:传感系统用于感知机器人周围环境的变化,例如位置、速度、力/扭矩、温度等参数。
常用的传感器包括编码器、激光雷达、摄像头、红外线传感器等。
4. 控制系统:控制系统是机器人的“大脑”,负责接收传感器反馈的数据并进行处理,然后发出指令来控制机器人的动作。
控制系统通常由嵌入式处理器、操作系统、编程语言和人机界面等组成。
5. 执行机构:执行机构是机器人完成特定任务的关键组件,例如抓手、喷涂枪、焊接头等。
执行机构通常与末端执行器相连,可以根据需要进行调节和更换。
6. 配套软件和设备:除了机器人本体外,还需要相应的配套软件和设备来支持机器人的运行和维护。
例如机器人操作系统、编程软件、调试工具、维护手册等。
综上所述,工业机器人本体的基本组成包括机械结构、驱动系统、传感系统、控制系统、执行机构和配套软件和设备等多个部分,它们相互协作,共同实现机器人的功能和任务。



工业机器人技术与应用项目三工业机器人的机械系统任务二机器人的本体结构导入●什么是机器人的本体结构?●机器人的本体结构在哪里?目录学习目标知识准备任务实施主题讨论12学习目标机器人基座、腰部结构机器人上、下臂结构知识目标机器人基座、腰部及上、下臂结构一、机器人基座、腰部结构1. 基座及腰部结构基座7是整个机器人的基础件,机器人通过基座与地基或者其它工作平台固定,同时机器人的电缆、气管等也是通过基座上的连接插座进入机器人的。
腰体6位于基座和下臂之间,可以带动下臂及以上部分在基座上回转。
腰体上凸耳,凸耳一侧通过下臂安装端面5与下臂连接,另一侧安装下臂驱动电机。
一、机器人基座、腰部结构视频:基座及腰部结构二、机器人的上、下臂结构1. 下臂结构下臂安装在腰部和上臂之间,可以带动上臂及以后部分一同摆动。
下臂断面呈U形结构,用于布置各种电缆及管线。
二、机器人的上、下臂结构视频下臂结构二、机器人的上、下臂结构2. 上臂后段结构上臂后段是连接下臂和上臂前段的中间体,可带动上臂前段及手腕部分一起,相对于下臂旋转。
上臂后段为箱体结构,上方箱体内安装R轴(J4)回转电机(对于前驱RBR 结构)。
二、机器人的上、下臂结构视频上臂后段结构二、机器人的上、下臂结构3. R 轴传动结构谐波减速器的刚轮3.1与电机1的外壳、电机座2一起,固定在上臂后段6的壳体中;谐波减速器的柔轮3.3与过渡轴5的后端面、径向轴承4的里圈连接,轴承4的外圈安装在上臂后段6的壳体中作为支撑;过渡轴5的前端与上臂前段8、CRB轴承的里圈连接,轴承外圈固定在上臂后段6的前端面上作为支撑。
电机1的输出轴与谐波减速器的谐波发生器3.2连接,动力传递给柔轮,通过柔轮带动过渡轴5旋转,进而带动上臂后段8作手腕回转运动(J4轴)。
二、机器人的上、下臂结构视频R轴传动结构任务实施学习视频,完成工作页内容主题讨论讨论问题◆基座、腰部及上、下臂由哪些部分组成?◆基座、腰部及上、下臂结构的特点?小结完成本任务学习后,掌握了机器人基座、腰部及上、下臂结构,为后续学习打下了基础。
机器人的基本结构一、引言机器人是指能够模仿人类的行为和动作,完成各种任务的智能设备。
机器人的基本结构是机械、电子、计算机和控制系统的综合体,下面将详细介绍机器人的基本结构。
二、机械结构机械结构是机器人的骨架,决定了机器人的外形和动作能力。
机械结构通常包括机器人的身体、关节、传动系统等部分。
1. 身体:机器人的身体是机械结构的基础,决定了机器人的形状和尺寸。
常见的机器人身体结构有人形、四足、六足等多种形式,不同形式的机器人身体结构适用于不同的任务。
2. 关节:关节是机器人身体的连接部分,使机器人能够进行各种运动。
关节通常由电机、减速器、传感器等组成,通过控制系统控制关节的运动。
3. 传动系统:传动系统是机器人的动力来源,将电机的转动转化为机器人身体的运动。
常见的传动系统有齿轮传动、带传动、链传动等,不同的传动系统能够满足不同的运动需求。
三、电子结构电子结构是机器人的神经系统,负责控制机器人的运动和感知环境。
电子结构通常包括传感器、执行器、控制器等部分。
1. 传感器:传感器是机器人感知外部环境的重要组成部分,能够获取各种物理量和信号。
常见的传感器有摄像头、激光雷达、压力传感器等,通过传感器可以实现机器人对环境的感知和识别。
2. 执行器:执行器是机器人的执行部件,根据控制信号实现机器人的运动。
常见的执行器有电机、液压缸、电磁阀等,通过执行器可以实现机器人的运动和操作。
3. 控制器:控制器是机器人的大脑,负责处理传感器的信息和发出运动指令。
控制器通常由嵌入式系统或计算机组成,能够实时控制机器人的运动和决策。
四、计算机结构计算机结构是机器人的智能中枢,负责处理和分析大量的数据。
计算机结构通常包括主控板、处理器、内存等部分。
1. 主控板:主控板是机器人计算机结构的核心,负责控制机器人的各个部分协调工作。
主控板通常集成了处理器、内存、接口等功能,是机器人的重要组成部分。
2. 处理器:处理器是机器人计算机结构的计算核心,负责进行各种算法和数据处理。