情景二 任务一 简单阶梯轴加工
- 格式:doc
- 大小:999.00 KB
- 文档页数:10

学生工作页班级组长:组员:科目任务名称:日期1. 任务描述如图1,编写阶梯轴的数控加工程序。
技术要求1. 一般线性尺寸公差按GB/T1804-m确定。
2. 毛坏尺寸φ45×80,端面已车平。
3. 零件不切断。
阶梯轴比例材料数量1:1 45# 1 图12. 讨论加工方法(学生分组回忆、讨论)从“工艺路线,装夹方法,主轴转速,吃刀量,进给速度,倒角方法,刀具选择”等方面进行讨论。
3. 编写数控编程的准备工作,分析图样,确定加工工艺、设备、装夹、工艺路线、刀具、切削用量,填写数控加工工序卡零件名称阶梯轴零件图号车间材料毛坯尺寸夹具使用设备工步号工步内容刀具号刀具规格R(mm) 主轴转速n(r/min)进给量f(mm/r)背吃刀量a p(mm)备注123编制审核批准日期共1页第1页4.编写数控加工程序(重点,教师讲解,突出G00、G01指令的用法,)5、学习总结(1)课堂中遇到的问题:序号遇到的问题解决方法1 □老师指导□同学帮助□自我学习□待解决2 □老师指导□同学帮助□自我学习□待解决3 □老师指导□同学帮助□自我学习□待解决(2)数控编程三大步:序号步骤备注1236、小组感想总结7、作业:程序阅读练习(课后作业):以下程序是某零件数控车削加工的完整程序。
根据程序,在坐标纸上描绘走刀路线图,并且找出部分工艺数据填表。
(1)数控程序O1002;N100 T0101 M03 S600; N102 G50 X50 Z50;N104 G0 X41 Z2;N106 G1 Z-45 F150;N108 X45;N110 G0 Z2;N112 X36;N114 G1 Z-24.8;N116 X45; N118 G0 X50 Z50; N120 T0202 S800; N122 G0 X35 Z2; N124 G1 Z-25 F80; N126 X36.5;N128 X40 W-1.5; N130 Z-45;N132 X46;N134 G0 X50 Z50; N136 M30;(2)走刀轨迹(3)由程序分析加工工艺主轴转速刀号背吃刀量进给速度粗车精车。


任务一简单阶梯轴加工【知识目标】1.掌握数控机床的编程规则。
2.掌握数控加工程序开始与结束一般指令。
3.掌握用G00和G01指令加工阶梯轴的编程方法。
【能力目标】1.掌握外圆加工刀具的选用、安装方法。
2.阶梯轴的加工方法。
3.数控机床的自动运行方法。
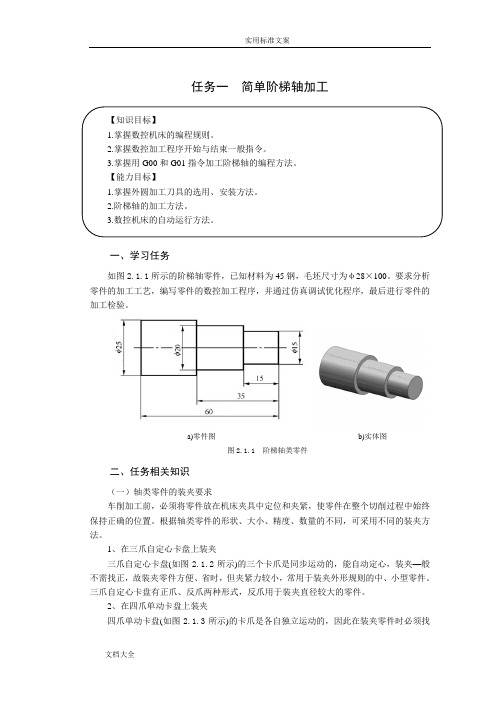
一、学习任务如图2.1.1所示的阶梯轴零件,已知材料为45钢,毛坯尺寸为φ28×100。
要求分析零件的加工工艺,编写零件的数控加工程序,并通过仿真调试优化程序,最后进行零件的加工检验。
a)零件图b)实体图图2.1.1 阶梯轴类零件二、任务相关知识(一)轴类零件的装夹要求车削加工前,必须将零件放在机床夹具中定位和夹紧,使零件在整个切削过程中始终保持正确的位置。
根据轴类零件的形状、大小、精度、数量的不同,可采用不同的装夹方法。
1、在三爪自定心卡盘上装夹三爪自定心卡盘(如图2.1.2所示)的三个卡爪是同步运动的,能自动定心,装夹—般不需找正,故装夹零件方便、省时,但夹紧力较小,常用于装夹外形规则的中、小型零件。
三爪自定心卡盘有正爪、反爪两种形式,反爪用于装夹直径较大的零件。
2、在四爪单动卡盘上装夹四爪单动卡盘(如图2.1.3所示)的卡爪是各自独立运动的,因此在装夹零件时必须找正后才可车削,但找正比较费时。
其夹紧力较大,常用于装夹大型或形状不规则的零件。
四爪单动卡盘的卡爪可装成正爪或反爪,反爪用于装夹较大的零件。
图2.1.2 三爪单动卡盘图2.1.3 四爪单动卡盘3、用双顶尖装夹对于较长的或工序较多的零件,为保证多次装夹的精度,采用双顶尖装夹的方法,如图2.1.4所示。
用双顶尖装夹零件方便,无需找正,重复定位精度高,但装夹前需保证零件总长并在两端钻出中心孔。
图2.1.4 双顶尖装夹零件图2.1.5一夹—顶装夹零件4、用一夹—顶装夹用双顶尖装夹零件精度高,但刚性较差,故在车削一般轴类零件时采用一端用卡盘夹住,另—端用顶尖顶住的装夹方法,如图2.1.5所示。
简单阶梯轴加工教学设计Revised as of 23 November 2020《简单阶梯轴加工》教学设计教学设计说明本课题是学生刚刚接触零件程序编写及零件自动加工,故对零件精度方面没有要求,只要求学生做出零件外形轮廓即可。
教学中为保证学生能自动加工出图示零件,必须掌握常用指令G00、G01等应用,会安排切削工艺,编写零件加工程序,因此,常用G00、G01等指令,零件程序的编写为本课题理论部分教学重点,技能学习重点为掌握单段加工方法及自动加工方法。
为解决本课题重点、难点,在教学方法和组织过程中,根据不同情况采用不同教学方法和教学手段进行教学;编程指令及应用采取以讲授为主,辅以课件动画演示;分层加工工艺过程采用加工录像或动画演示;编写数控程序以教师讲解,学生模仿、讨论、训练,教师引导的形式,以培养学生能力。
技能学习主要采用动作示范,也可以录像或仿真进行辅助教学。
教学中还应注意学生对刀练习,工件、刀具装夹练习的正确性及熟练程度,加工准备工作中应随时强调动作规范及安全操作等注意事项。
板书设计课题一简单阶梯轴加工【明确学习目标】课题零件图(见附图)一、知识学习(一)程序指令1.顺序号指令(程序段号)2.进给功能指令地址:F,功能表示刀具加工时进给速度。
3.辅助功能指令地址:M。
M00~M99,前置的0可省略。
功能:表示机床辅助功能的接通和断开。
4.准备功能指令地址:G。
G00~G999。
功能:建立机床控制系统工作方式的一种命令。
5.刀具快速定位指令(G00)(1)指令功能:指刀具以机床规定的速度(快速)从所在位置移动到目标点。
(2)指令格式:G00 XZ;6.直线插补指令(G01或G1)(1)指令功能:刀具以进给功能F下编程的进给速度沿直线从起始点加工到教学实践教学环节与主要内容具体教学目标教学活动【复习导入】(学时分配:10mi n)复习内容:1.外圆、端面对刀方法;2.机床坐标系与工件坐标系;3.工件、刀具装夹方法及要领。
任务1 阶梯轴类零件加工2、工作任务按工艺完成图1-1所示阶梯轴加工。
图1-1 阶梯轴 3、相关实践知识 轴类零件是机械结构中用于传递运动和动力的重要零件之一,其加工质量直接影响到机械的使用性能和运动精度。
轴类零件的主要表面是外圆,车削是外圆加工的主要方法。
3.1 选择车刀、车床和工件安装方式3.1.1车刀类型与选用(1)车刀的类型;车刀是金属切削加工中应用最广的一种刀具,它可在各种类型的车床上加工外圆、内孔、倒角、切槽与切断、车螺纹以及其它成形面。
车刀的类型很多,既可按用途可分,也可按刀具材料,还可按结构分。
按用途可大致分:偏刀——以90°偏刀居多,如图1-2a ,用来车削外圆、台阶、端面。
由于主偏角大,,切削时产生的背向切削力小,故很适宜车细长的轴类工件弯头刀——以45°弯头刀最为常见,如图1-2b ,用来车削外圆、端面、倒角。
完成上述加工表面不需转刀架,也不用换刀,可减少辅助时间,提高生产效率。
切断刀(切槽刀)——如图1-2c ,用来切断工件或在工件上加工沟槽。
镗刀——如图1-2d ,用来加工内孔。
圆头刀——如图1-2e ,用来车削工件台阶处的圆角和圆弧槽。
螺纹车刀——如图1-2f ,用来车削螺纹。
除此之外,还有端面车刀、直头外圆车刀和成形车刀等等。
技术要求调质处理HBS217~255。
零件名称:传动轴 材料45生产类型:小批图1-2车刀种类按材料分:整体式高速钢车刀——如图1-3,这种车刀刃磨方便,刀具磨损后可以多次重磨。
但刀杆也为高速钢材料,造成刀具材料的浪费。
刀杆强度低,当切削力较大时,会造成破坏。
一般用于较复杂成形表面的低速精车。
硬质合金焊接式车刀——如图1-4所示,这种车刀是将一定形状的硬质合金刀片钎焊在刀杆的刀槽内制成的。
其结构简单,制造刃磨方便,刀具材料利用充分,应用十分广泛。
但其切削性能受工人的刃磨技术水平和焊接质量影响,且刀杆不能重复使用,材料浪费。
任务一简单阶梯轴加工【知识目标】1.掌握数控机床的编程规则。
2.掌握数控加工程序开始与结束一般指令。
3.掌握用G00和G01指令加工阶梯轴的编程方法。
【能力目标】1.掌握外圆加工刀具的选用、安装方法。
2.阶梯轴的加工方法。
3.数控机床的自动运行方法。
一、学习任务如图2.1.1所示的阶梯轴零件,已知材料为45钢,毛坯尺寸为φ28×100。
要求分析零件的加工工艺,编写零件的数控加工程序,并通过仿真调试优化程序,最后进行零件的加工检验。
a)零件图b)实体图图2.1.1 阶梯轴类零件二、任务相关知识(一)轴类零件的装夹要求车削加工前,必须将零件放在机床夹具中定位和夹紧,使零件在整个切削过程中始终保持正确的位置。
根据轴类零件的形状、大小、精度、数量的不同,可采用不同的装夹方法。
1、在三爪自定心卡盘上装夹三爪自定心卡盘(如图2.1.2所示)的三个卡爪是同步运动的,能自动定心,装夹—般不需找正,故装夹零件方便、省时,但夹紧力较小,常用于装夹外形规则的中、小型零件。
三爪自定心卡盘有正爪、反爪两种形式,反爪用于装夹直径较大的零件。
2、在四爪单动卡盘上装夹四爪单动卡盘(如图2.1.3所示)的卡爪是各自独立运动的,因此在装夹零件时必须找正后才可车削,但找正比较费时。
其夹紧力较大,常用于装夹大型或形状不规则的零件。
四爪单动卡盘的卡爪可装成正爪或反爪,反爪用于装夹较大的零件。
图2.1.2 三爪单动卡盘图2.1.3 四爪单动卡盘3、用双顶尖装夹对于较长的或工序较多的零件,为保证多次装夹的精度,采用双顶尖装夹的方法,如图2.1.4所示。
用双顶尖装夹零件方便,无需找正,重复定位精度高,但装夹前需保证零件总长并在两端钻出中心孔。
图2.1.4 双顶尖装夹零件图2.1.5一夹—顶装夹零件4、用一夹—顶装夹用双顶尖装夹零件精度高,但刚性较差,故在车削一般轴类零件时采用一端用卡盘夹住,另—端用顶尖顶住的装夹方法,如图2.1.5所示。
为防止切削时产生轴向位移,可采用限位支承或台阶限位。
其中台阶限位安全,刚性好,能承受较大切削力,故应用广泛。
5、工件装夹的原则(1)用三爪自定心卡盘装夹工件时,若工件直径<=30mm,其悬伸长度应不大于直径5倍,若工件直径>30mm,其悬伸长度应不大于直径的3倍。
(2)当工件长度较长或很长,为增加工件的刚性,防止在车削过程中产生振动、崩刀等,需采用一夹一顶或使用跟刀架。
(3)当加工轴类零件时,各个表面的同轴度要求很高。
可采用双顶尖装夹。
(4)加工一些特殊的零件,如薄壁套,要使用辅助夹具。
车内孔时使用开口套筒,以减少工件的变形。
车外圆时使用小锥度心轴,以内孔定位。
(5)被加工表面的回转轴线与基准面相互垂直的外形较复杂的工件(如壳体)可采用花盘。
(二)加工顺序的确定数控车削加工顺序一般按照下列两个原则来确定。
1、先粗后精原则所谓先粗后精,就是按照粗车→半精车→精车的顺序,逐步提高加工精度。
粗车可在较短时间内将工件表面上的大部分加工余量切掉。
一方面提高加工效率,另一方面使精车的加工余量均匀。
如粗车后所留余量的均匀性满足不了精车加工的要求,则应安排半精车。
为保证加工精度,精车时,要按照图样尺寸一刀出零件轮廓。
2、先近后远原则这里所指的远与近,是按加工部位相对于对刀点的距离而言的。
离对刀点远的部位后加工,可以缩短刀具的移动距离,减少空行程时间。
对于车削而言,先近后远还有利于保持零件的刚性,改善切削条件。
(三)走刀路线的确定精加的走刀路线基本上是沿其零件轮廓顺序进行的。
因此重点在于确定粗加工及空行程的走刀路线。
1、最短空行程路线图2.1.6(a)所示为采用矩形循环方式进行粗车的一般情况,其对刀点A设置在较远的位置,是考虑到加工过程中需方便换刀,同时,将起刀点与对刀点重合在一起。
按三刀粗车的走刀路线安排:第1刀为A→B→C→D→A:第2刀为A→E→F→G→A:第3刀为A→H→I→J→A。
a)起刀点与对刀点重合时b)起刀点与对刀点分离时图2.1.6 最短行程路线示意图图2.1.6(b)所示则是将起刀点与对刀点分离,并设于B点位置,仍按相同的切削有量进行三刀粗车,其走刀路线安排:对刀点A到起刀点B的空行程为A→B;第1刀为B→C→D→E→B;第2刀为B→F→G→H→B;第3刀为B→I→J→K→B;起刀点B到对刀点A的空行程B→A。
显然,图2.1.6(b)所示的走刀路线短。
2、大余量毛坯的切削路线图2.1.7(a)所示为车削大余量工件走刀路线。
在同样的背吃刀量情况下,按图2.1.7(a)所示的1—5顺序切削,使每次所留余量相等。
按照数控车床加工的特点,还可以放弃常用的阶梯车削法,改用顺毛坯轮廓进给的走刀路线,如图2.1.7(b)所示。
a)阶梯车削法b)顺毛坯轮廓车削法图2.1.7 大余量毛坯的切削路线(四)数控车床编程基础数控车床的主要编程特点如下:(1) 在一个程序段中,可以采用绝对值编程(用X、Z表示)、增量值编程(用U、W表示)或者二者混合编程。
(2) 直径方向(X方向)用绝对值编程时,X以直径值表示;用增量值编程时,以径向实际位移量的二倍值表示,并附方向符号(正向可以省略)。
(3)车削加工毛坯余量较大时,为简化编程,数控装置常备有不同形式的固定循环,可以进行多次重复循环切削。
(4)编程时,常认为车刀刀尖是一个点,而实际上为了提高刀具寿命和工件表面质量,车刀刀尖常被磨成一个圆弧,因此,当编制加工程序时,需要考虑对刀具进行半径补偿。
(五)程序的结构数控程序是若干个程序段的集合。
每个程序段独占一行。
每个程序段由若干个字组成,每个字由地址和跟随其后的数字组成。
地址是一个英文字母。
一个程序段中各个字的位置没有限制,但是,长期以来如表2.1.1的排列方式已经成为大家都认可的方式:表2.1.1排列方式N- G- X- Y- Z- ····F- S- T- M- LF行号准备功能位置代码进给速度主轴转速刀具号辅助功能行结束在一个程序段中间如果有多个相同地址的字出现,或者同组的G功能,取最后一个有效。
(1)行号Nxxxx 程序的行号,可以不要,但是有行号,在编辑时会方便些。
行号可以不连续。
行号最大为9999,超过后从再从1开始。
选择跳过符号“/”,只能置于一程序的起始位置,如果有这个符号,并且机床操作面板上“选择跳过”打开,本条程序不执行。
这个符号多用在调试程序,如在开冷却液的程序前加上这个符号,在调试程序时可以使这条程序无效,而正式加工时使其有效。
(2)准备功能地址“G”和数字组成的字表示准备功能,也称之为G功能,见表2.1.2。
G功能根据其功能分为若干个组,在同一条程序段中,如果出现多个同组的G功能,那么取最后一个有效。
G功能分为模态与非模态两类。
一个模态G功能被指令后,直到同组的另一个G功能被指令才无效。
而非模态的G功能仅在其被指令的程序段中有效。
例:……N10 G01 X250. Y320.N11 G04 X100N12 G01 Z-120.N13 X380. Y400.……在这个例子的N12这条程序中出现了“G01”功能,由于这个功能是模态的,所以尽管在N13这条程序中没有“G01”,但是其作用还是存在的。
表2.1.2 准备功能指令(3)辅助功能地址“M”和两位数字组成的字表示辅助功能,也称之为M功能。
见表2.1.3。
表2.1.3辅助功能指令(4)主轴转速地址S后跟四位数字,格式:SxxxxG96是接通恒线速度控制的指令,当G96执行后,S后面的数值为切削速度。
例如:G96 S100表示切削速度100m/min。
G97是取消G96的指令。
执行G97后,S后面的数值表示主轴每分钟转数。
例如:G97 S800 表示主轴转速为800r/min,系统开机状态为G97指令。
(5)进给功能地址F后跟四位数字,格式:Fxxxx在含有G99程序段后面,再遇到F指令时,则认为F所指定的进给速度单位为mm/r。
系统开机状态为G99,只有输入G98指令后,G99才被取消。
而G98为每分钟进给,单位为mm/min。
(6)T功能该指令用来控制数控系统进行选刀和换刀。
用地址T和其后的数字来指定刀具号和刀具补偿号,例如T0202表示采用2号刀具和2号刀补。
(六)基本指令G00、G01在数控车床的程序中,X、Z后面跟的是绝对尺寸,U、W后面跟的是增量尺寸。
X、Z后所有编入的坐标值全部以编程原点为基准,U、W后所有编入的坐标值全部以刀具前一个坐标位置作为起始点来计算。
1、快速点位移动G00格式:G00 X(U)_Z(W)_;其中,X(U)_、Z(W)_为目标点坐标值。
说明:(1) 执行该指令时,刀具以机床规定的进给速度从所在点以点位控制方式移动到目标点。
移动速度不能由程序指令设定,它的速度已由生产厂家预先调定。
若编程时设定了进给速度F,则对G00程序段无效。
(2) G00为模态指令,只有遇到同组指令时才会被取替。
(3) X、Z后面跟的是绝对坐标值,U、W后面跟的是增量坐标值。
(4) X、U后面的数值应乘以2,即以直径方式输入,且有正、负号之分。
如图2.1.8所示,要实现从起点A快速移动到目标点C。
其绝对值编程方式为:G00 X141.2 Z98.1;其增量值编程方式为:G00 U91.8 W73.4;图2.1.8 快速点定位执行上述程序段时,刀具实际的运动路线不是一条直线,而是一条折线,首先刀具从点A以快速进给速度运动到点B,然后再运动到点C。
因此,在使用G00指令时要注意刀具是否和工件及夹具发生干涉,对不适合联动的场合,两轴可单动。
如果忽略这一点,就容易发生碰撞,而在快速状态下的碰撞就更加危险。
2.直线插补G01直线插补也称直线切削,该指令使刀具以直线插补运算联动方式由某坐标点移动到另一坐标点,移动速度由进给功能指令F来设定。
机床执行G01指令时,如果之前的程序段中无F指令,在该程序段中必须含有F指令。
G01和F都是模态指令。
格式:G01 X(U)_Z(W)_ F_;其中,X(U)、Z(W)为目标点坐标,F为进给速度。
说明(1) G01指令是模态指令,可加工任意斜率的直线。
(2) G01指令后面的坐标值取绝对尺寸还是取增量尺寸,由尺寸地址决定。
(3) G01指令进给速度由模态指令F决定。
如果在G01程序段之前的程序段中没有F 指令,而当前的G01程序段中也没有F指令,则机床不运动,机床倍率开关在0%位置时机床也不运动。
因此,为保险期间G01程序段中必须含有F指令(4) G01指令前若出现G00指令,而该句程序段中未出现F指令,则G01指令的移动速度按照G00指令的速度执行。
3、倒角和倒圆(G01指令的特殊用法)G01指令在编程还有一种特殊用法,即倒角和倒圆。