有限元等参数单元
- 格式:pdf
- 大小:222.31 KB
- 文档页数:33
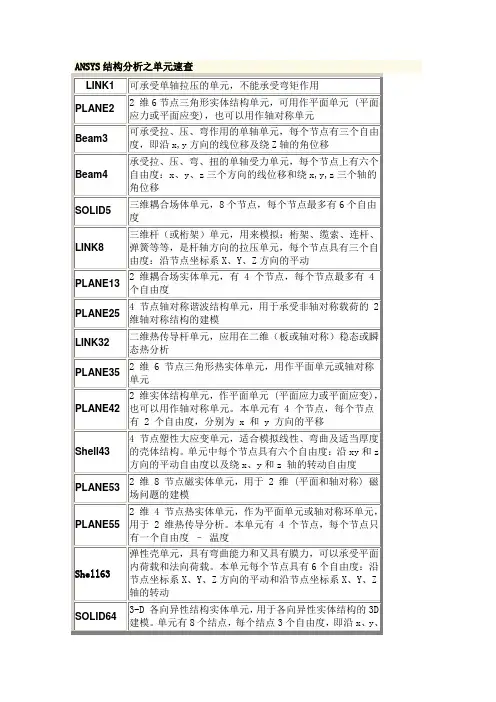
SOLID453-D结构实体单元产品:MP ME ST <> <> PR <> <> <> PP EDSOLID45单元说明solid45单元用于构造三维实体结构.单元通过8个节点来定义,每个节点有3个沿着xyz方向平移的自由度.单元具有塑性,蠕变,膨胀,应力强化,大变形和大应变能力。
有用于沙漏控制的缩减积分选项。
有关该单元的细节参看ANSYS, 理论参考中的SOLID45部分。
类似的单元有适用于各向异性材料的solid64单元。
Solid45单元的更高阶单元是solid95。
图 45.1 SOLID45几何描述SOLID45输入数据该单元的几何形状、结点位置、坐标系如图45.1: "SOLID45 几何描述"所示。
该单元可定义8个结点和正交各向异性材料。
正交各向异性材料方向对应于单元坐标方向。
单元坐标系方向参见坐标系部分。
单元荷载参见结点和单元荷载部分。
压力可以作为表面荷载施加在单元各个表面上,如图45.1: "SOLID45 几何描述"所示。
正压力指向单元内部。
可以输入温度和流量作为单元节点处的体载荷。
节点 I 处的温度 T(I) 默认为 TUNIF。
如果不给出其它节点处的温度,则默认等于 T(I)。
对于任何其它的输入方式,未给定的温度默认为 TUNIF。
对于流量的输入与此类似,只是默认值用零代替了TUNIF。
KEYOPT(1)用于指定包括或不包括附加的位移形函数。
KEYOPT(5)和KEYOPT(6)提供不同的单元输出选项(参见单元输出部分)。
当KEYOPT(2)=1时,该单元也支持用于沙漏控制的均匀缩减(1点)积分。
均匀缩减积分在进行非线性分析时有如下好处:∙相对于完全积分选项而言,单元刚度集成和应力(应变)计算需要更少的CPU时间,而仍能获得足够精确的结果。
∙当单元数量相同时,单元历史存储记录(.ESAV 和 .OSAV)的长度约为完全积分(2×2×2)的1/7。
1、有限元是近似求解一般连续场问题的数值方法2、有限元法将连续的求解域离散为若干个子域,得到有限个单元,单元和单元之间用节点连接3、直梁在外力的作用下,横截面的内力有剪力和弯矩两个.4、平面刚架结构在外力的作用下,横截面上的内力有轴力、剪力、弯矩 .5、进行直梁有限元分析,平面刚架单元上每个节点的节点位移为挠度和转角6、平面刚架有限元分析,节点位移有轴向位移、横向位移、转角。
7、在弹性和小变形下,节点力和节点位移关系是线性关系。
8、弹性力学问题的方程个数有15个,未知量个数有15个。
9、弹性力学平面问题方程个数有8,未知数8个。
10、几何方程是研究应变和位移之间关系的方程11、物理方程是描述应力和应变关系的方程12、平衡方程反映了应力和体力之间关系的13、把经过物体内任意一点各个截面上的应力状况叫做一点的应力状态14、9形函数在单元上节点上的值,具有本点为_1_.它点为零的性质,并且在三角形单元的任一节点上,三个行函数之和为_1_15、形函数是_三角形_单元内部坐标的_线性_函数,他反映了单元的_位移_状态16、在进行节点编号时,同一单元的相邻节点的号码差尽量小.17、三角形单元的位移模式为_线性位移模式_-18、矩形单元的位移模式为__双线性位移模式_19、在选择多项式位移模式的阶次时,要求_所选的位移模式应该与局部坐标系的方位无关的性质为几何_各向同性20、单元刚度矩阵描述了_节点力_和_节点位移之间的关系21、矩形单元边界上位移是连续变化的1. 诉述有限元法的定义答:有限元法是近似求解一般连续场问题的数值方法2. 有限元法的基本思想是什么答:首先,将表示结构的连续离散为若干个子域,单元之间通过其边界上的节点连接成组合体。
其次,用每个单元内所假设的近似函数分片地表示求解域内待求的未知厂变量。
3. 有限元法的分类和基本步骤有哪些答:分类:位移法、力法、混合法;步骤:结构的离散化,单元分析,单元集成,引入约束条件,求解线性方程组,得出节点位移。
第六章 非第二章至第五章的讨论以最小势能原理为基础,要求在单元内假设的位移场(试探函数)满足协调条件(在不同的单元内可以假设不同的的位移场)。
满足协调条件的单元,它们的收敛性等问题已在第四章中做了研究。
等参数单元就是目前处理二阶问题时应用最广的一种协调单元。
此外,还有一些单元,它们不满足协调条件,但仍可以收敛到真实解,这类单元称为非协调单元,可以看成是对等参数单元的一种改进,目的在于:在计算量增加不多的情况下,使单元的实际精度有所改善。
对于四阶问题(例如板、壳),协调条件要求单元之间位移和位移的一阶导数(转角)连续。
在第七章中将会看到,实现上述协调条件不是件容易的事,而且为此要增加相当大的计算量,因而人们在自编程序中常常对非协调单元感兴趣。
本章只讨论二阶问题,主要包括:非协调元的构造和分析方法,非协调元的理论基础(显然不能再利用最小势能原理),收敛判别方法。
这些结论对四阶问题同样适用。
从关于非协调元的讨论中,读者可以看到,有限元方法有了坚实的数学基础以后,在构造方法时思路可以开阔很多。
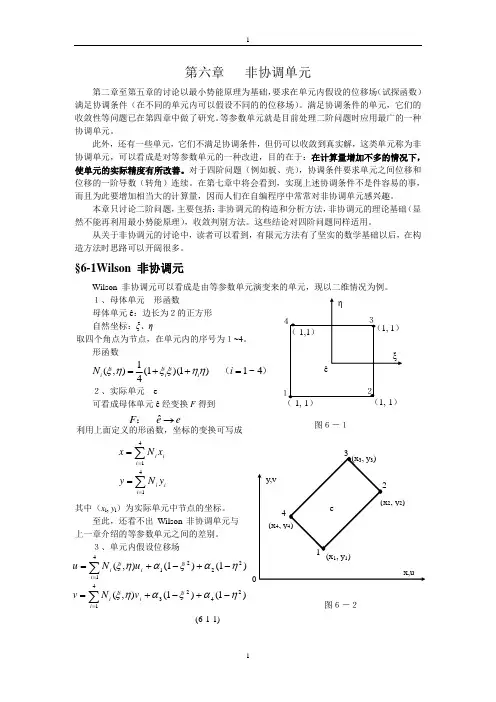
§6-1Wilson 非协调元Wilson 非协调元可以看成是由等参数单元演变来的单元,现以二维情况为例。
1、母体单元 形函数 母体单元ê:边长为2的正方形 自然坐标:ξ、η取四个角点为节点,在单元内的序号为1~4。
形函数2、实际单元 e可看成母体单元ê经变换F 得到利用上面定义的形函数,坐标的变换可写成其中(x i , y i )为实际单元中节点的坐标。
至此,还看不出Wilson 非协调单元与上一章介绍的等参数单元之间的差别。
3、单元内假设位移场图6-1图6-2) (4~1)1)(1(41),(=++=i N i i i ηηξξηξe eF →ˆ: ∑∑====4141i i i i iiy N y x Nx )1()1(),()1()1(),(242341222141ηαξαηξηαξαηξ-+-+=-+-+=∑∑==i i ii i iv Nv u Nu (6-1-1)同四节点等参元相比,单元内假定的位移场多了四项:它们有如下特性:(1) 不影响节点处的位移值,故称αl 为非节点自由度或单元的“内自由度”。

第五章 等(Isoparametric Elements)在前面的章节中我们已经认识了三角形单元和矩形单元。
这两种单元的边均为直边,用直边单元离散曲边的求解域势必要用更多的单元数才能较准确地描述实际边界。
本章将要介绍的等参数单元是目前应用最广的一类单元,可用这类单元更精确的描述不规则的边界。
这类单元的出现不仅系统的解决了构造协调位移单元的问题,而且自然坐标系的描述方法也广泛为其他类型的单元所采用。
等参数单元在构造形函数时首先定义一个规则的母体单元(参考单元),在母体单元上构造形函数,再通过等参数变换将实际单元与母体单元联系起来。
变换涉及两个方面:几何图形的变换(坐标变换)和位移场函数的变换,由于两种变换采用了相同的函数关系(形函数)和同一组结点参数,故称其为等参数变换。
§5-1四结点四边形等参数单元1、母体单元 自然坐标和形函数母体单元ê :边长为2的正方形,自然坐标系ξ,η 示于图5-1。
取四个角点为结点,在单元内的排序为1、2、3、4。
仿照矩形单元,可定义出四个形函数显然有如下特点:(i )是ξ,η的双线性函数 (ii )(iii)2、实际单元与母体单元之间的坐标变换(1) 坐标变换设xy 平面上的实际单元e 由母体单元经过变换F 得到,即 且规定结点(ξi ,ηi )与结点(x i , y i )对应(i =1~4)。
这样的变换不只一个,利用(5-1-1)定义的形函数即可写出这种变换中的一个1图5-1 ())4~1()1(141),(=++=i N i i i ηηξξηξ),(ηξi N ⎩⎨⎧=≠=i j i i N ij i 当 当 =10),(δηξ),(ηξi N 1)1)(1(41)1)(1(41)1)(1(41)1)(1(41),(41≡+-++++-++--=∑=ηξηξηξηξηξi i N e e F →: (5-1-2) (5-1-1) ii i i i i y N y x N x ⋅=⋅=∑∑==4141),(),(ηξηξ(5-1-3)(5-1-3)所定义的变换有如下特点:x , y 是ξ,η的双线性函数。
有限元等参数单元有限元分析是一种工程数值分析方法,广泛用于结构力学、固体力学等领域。
在有限元分析中,将结构或物体离散为许多小单元,每个小单元称为参数单元。
本文将介绍有限元等参数单元的概念和应用。
在有限元分析中,参数单元是对结构或物体进行离散化的基本单元。
它是通过数学建模技术将连续域问题转化为离散模型的重要工具。
参数单元可以是一维、二维或三维的。
在一维情况下,常见的参数单元有杆单元和梁单元等。
在二维情况下,常见的参数单元有三角形单元和四边形单元等。
在三维情况下,常见的参数单元有四面体单元和六面体单元等。
在有限元分析中,参数单元的选择要根据具体问题的性质来确定。
一般来说,参数单元的几何形状应能较好地适应结构或物体的形状。
对于复杂结构或物体,可以使用不同形状的参数单元进行组合,以更好地描述结构的几何特征。
在参数单元中,需要定义材料性质、几何性质和加载条件等参数。
材料性质包括弹性模量、泊松比、密度等。
几何性质包括长度、面积、体积等。
加载条件包括外力、边界条件等。
这些参数可以通过实验测量或根据经验来确定。
在有限元分析中,参数单元的刚度、质量和荷载等可以通过这些参数来计算。
有限元分析的基本思想是,将结构或物体分解为多个参数单元,并将其转化为一个或多个代数方程组。
通过求解这个方程组,可以得到结构或物体的应力、应变、位移等信息。
有限元方法可以有效地分析复杂结构的性能和行为,并为工程设计和优化提供依据。
总之,有限元等参数单元是在有限元分析中对结构或物体进行离散化的基本单元。
它是将连续域问题转化为离散模型的重要工具。
参数单元的选择要根据具体问题的性质来确定,并通过定义材料性质、几何性质和加载条件等参数来描述结构的特征。
有限元分析是一种用于求解结构或物体应力、应变、位移等信息的数值分析方法,可以为工程设计和优化提供依据。