无人机滑跑纠偏控制
- 格式:pdf
- 大小:751.85 KB
- 文档页数:8
无人机算法轨迹偏差The issue of unmanned aerial vehicles (UAVs) having trajectory deviations is a concerning problem that needs to be addressed. 无人机存在轨迹偏差的问题引起了人们的重视,需要解决。
One of the main reasons for UAV trajectory deviations could be attributed to environmental factors such as wind patterns and turbulence. 无人机轨迹偏差的主要原因之一可能是环境因素,例如风向和气流的影响。
Moreover, inaccuracies in the UAV's navigation system or GPS signals could also contribute to the trajectory deviations. 此外,无人机导航系统或GPS信号的不准确性也可能导致轨迹偏差。
Another factor that may lead to the trajectory deviations of UAVs is the limitations of the algorithms used for path planning and control. 另一个可能导致无人机轨迹偏差的因素是用于路径规划和控制的算法的局限性。
Furthermore, human error or improper calibration of sensors could also result in deviations in the trajectory of UAVs. 此外,人为错误或传感器校准不当也可能导致无人机轨迹偏差。
Addressing the issue of UAV trajectory deviations requires a comprehensive approach that involves improving the accuracy of navigation systems, refining algorithms for path planning, and ensuring proper calibration of sensors. 解决无人机轨迹偏差的问题需要全面的方法,包括提高导航系统的准确性、改进路径规划的算法,以及确保传感器的正确校准。
飞翼布局无人机滑跑纠偏控制王彦雄;周洲;邵壮;祝小平【摘要】Due to good robustness requirement of the control law, and the nonlinearity of six degrees⁃of⁃freedom multivariable mathematical model of flying⁃wing UAV, a nonlinear lateral deviation correction control law based on active disturbance rejection control technique ( ADRC) for UAV is proposed. A complex control scheme include front⁃wheel steering, drag rudder and main⁃wheel differential braking is used. Due to the efficiencies of lateral devi⁃ation correction control actuators vary in a large range during taxing, and drag rudder and braking having ability of both lateral deviation correction and speed reduction, weighted pseudo⁃inverse method is used to allot yaw moment order and drag order. Antiskid brake control law based on ADRC is designed. The simulated result show that lateral deviation correction control law based on ADRC could estimates and compensates the adverse impact of runway en⁃vironment and crosswind disturbance. Weighted pseudo⁃inverse method could allot yaw moment order and drag order dynamically.%针对滑跑纠偏控制律对良好鲁棒性的要求,以及飞翼布局无人机地面滑跑六自由度模型非线性、多变量的特点,提出了基于自抗扰控制理论的无人机非线性滑跑纠偏控制律;由于采用了前轮转向、阻力方向舵和主轮差动刹车联合纠偏,针对控制执行机构纠偏效率在滑跑过程中变化较大,以及阻力方向舵和刹车机构兼具减速和纠偏功能的特点,提出采用加权伪逆法对偏航力矩及阻力控制指令进行动态控制分配。
2019年2月第37卷第1期西北工业大学学报JournalofNorthwesternPolytechnicalUniversityFeb.Vol.372019No.1://doi.org/10.1051/jnwpu/20193710007收稿日期:2018⁃02⁃01作者简介:马振宇(1992 ),西北工业大学博士研究生,主要从事飞行器动力学与控制研究㊂全翼布局太阳能无人机滑跑特性分析与控制马振宇1,2,祝小平2,周洲31.西北工业大学航天学院,陕西西安㊀710072;2.西北工业大学无人机特种技术重点实验室,陕西西安㊀710065;3.西北工业大学航空学院,陕西西安㊀710072æèççöø÷÷摘㊀要:以全翼布局太阳能无人机为研究对象,针对其滑跑过程中没有前轮转向伺服和方向舵等进行控制的问题,提出了采用螺旋桨动力差动进行滑跑控制的方法㊂首先,建立了起落架前轮自由转向和前轮固支2种布局形式的全翼布局太阳能无人机滑跑模型,并对其在不同速度下的滑跑特性进行分析㊂然后,基于线性自抗扰控制方法设计了以螺旋桨动力差动为控制输出的偏航角控制器㊂最后,通过改进向量场轨迹跟踪方法,设计了适合起降滑跑的直线轨迹跟踪器㊂仿真结果表明,所设计的控制器能够对全翼布局太阳能无人机的起降滑跑过程进行有效控制,并具有较好的鲁棒性㊂关㊀键㊀词:全翼布局;太阳能无人机;螺旋桨动力差动;滑跑控制;轨迹跟踪;线性自抗扰中图分类号:V249.1㊀㊀㊀文献标志码:A㊀㊀㊀文章编号:1000⁃2758(2019)01⁃0007⁃06㊀㊀由于相关技术的飞速发展,太阳能无人机的续航时间不断增加,太阳能无人机逐渐迈入实用化阶段㊂以 探路者[1] 和 太阳神[2] 为代表的全翼布局是太阳能无人机的一种重要布局形式,与常规布局的太阳能无人机相比,其具有结构简洁㊁气动效率高㊁太阳能电池铺设率高等优点㊂由于太阳能无人机对于重量十分敏感,且起落架的工作时间较短,全翼布局太阳能无人机的起落架设计必须尽可能轻量化,通常由4个轮胎和2个碳纤维支架组成,没有专门的减震机构和转向伺服机构,前轮有自由转向和固支2种形式㊂由于没有前轮转向伺服舵机和方向舵,全翼布局太阳能无人机只能通过螺旋桨动力差动进行滑跑过程的横航向控制㊂因此,有必要对全翼布局太阳能无人机滑跑过程进行建模,并设计采用动力差动为控制输出的滑跑控制方法㊂针对无人机滑跑问题,文献[3]建立了前三点式布局无人机包含起落架和刹车装置的数学模型,并设计了基于主动刹车和方向舵偏转的纠偏控制律㊂文献[4]提出采用加权伪逆法对偏航力矩及阻力控制指令进行动态控制分配的方法㊂文献[5]对四轮起落架布局的无人机进行了建模,并设计了简单的纠偏控制方法㊂由于全翼布局太阳能无人机滑跑过程中速度变化范围较大,受到气动和地面的复合作用,同时螺旋桨动力差动效率变化范围较大,因此所设计的滑跑控制器必须具有很好的抗干扰能力㊂文献[6]对非线性自抗扰控制方法进行简化,提出了以线性扩张状态观测器(LESO)为核心的线性自抗扰控制方法(LADRC)㊂该方法在具有较强抗干扰能力的同时,大大简化了参数整定过程,具有较好的工程实现价值㊂本文在相关研究的基础上,建立了全翼布局太阳能无人机滑跑模型,并对其滑跑特性进行了分析㊂设计了基于线性自抗扰理论的偏航角控制器㊂在偏航角控制器的基础上通过改进向量场轨迹跟踪方法,设计了适合起降过程的直线轨迹跟踪器㊂1㊀全翼布局太阳能无人机滑跑动力学模型与滑跑特性分析本文中研究的全翼布局太阳能无人机由中央翼西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第37卷段㊁外翼段㊁垂直安定面和起落架组成,布局形式如图1所示㊂图1㊀全翼布局太阳能无人机1.1㊀滑跑动力学模型1.1.1㊀起落架模型假设无人机除轮胎外都是刚体,2种起落架结构形式下,地面对无人机的作用力如图2所示㊂图2a)和图2b)分别为前轮自由转向和前轮固支时的受力情况㊂其中FnFfFs为轮胎受到地面的支持力㊁摩擦力和侧向力;af和ar分别为前轮和后轮到重心的纵向距离;bt为轮胎到飞机对称面的水平距离;βs为侧偏角㊂图2㊀前轮自由转向和前轮固支布局起落架受力示意图将轮胎简化为弹簧-阻尼系统,并忽略其质量,可以得到Fni=Kδtδti+Cδṫδti㊀i=1,2,3,4(1)式中,Kδt为轮胎的等效弹簧刚度;Cδt为轮胎的等效阻尼系数;δti和̇δti是轮胎的压缩量和压缩速度㊂̇δti可以通过δti对时间进行求导得到㊂通过无人机的状态和起落架几何关系得到轮胎的压缩量:δ t1=-H+h-afsinθ-btsinφδt2=-H+h-afsinθ+btsinφδ t3=-H+h+arsinθ-btsinφδt4=-H+h+arsinθ+btsinφìîíïïïïïï(2)δti=sat(δ ti,0,0.02)㊀i=1,2,3,4(3)式中,H是重心到地面的距离;h为轮胎无压缩时无人机重心的离地高度;θ为俯仰角;φ为滚转角㊂sat为饱和函数,将轮胎变形量限制在0 0.02m之间㊂轮胎受到的摩擦力和侧力可以表示为:Ffi=μfFni㊀i=1,2,3,4(4)Fsi=KsβsiFni㊀i=1,2,3,4(5)式中,μf为轮胎的滚动摩擦因数;Ks为轮胎的侧偏刚度㊂公式(5)只有在βsi为小角度时才成立,通常应小于5ʎ㊂假设滑跑过程中无人机的俯仰滚转姿态为小量,对于前轮固支的情况,可以通过以下公式求解βsi:βs1=arctan[-(v+afr)/(u+btr)]βs2=arctan[-(v+afr)/(u-btr)]βs3=arctan[-(v-arr)/(u+btr)]βs4=arctan[-(v-arr)/(u-btr)]ìîíïïïïï(6)式中,uv为体轴系下xy方向的速度;r为偏航角速度㊂对于前轮自由转向的情况:前轮会始终保持与航向平行,故βs1=βs2=0;后轮侧偏角与固支布局的计算方法相同㊂由于滑跑过程中俯仰角㊁滚转角和轮胎的侧偏角为小量,故机体受到地面的作用力和力矩可以表示为:Fbg=-ð4i=1Ffið4i=1Fsi-ð4i=1FniéëêêùûúúT(7)Mbg=(Fn1-Fn2+Fn3-Fn4)bt-ð4i=1FsiH(Fn1+Fn2)af-(Fn3+Fn4)ar-ð4i=1FfiH-(Ff1-Ff2+Ff3-Ff4)btéëêêêêêêùûúúúúúú(8)1.1.2㊀螺旋桨动力差动模型螺旋桨拉力可以简化为[7]:Fp=12ρSpCp((Kpδp)2-V2p)(9)式中,Sp和Cp为螺旋桨的桨盘面积和拉力系数;δp是油门大小;Kp为螺旋桨出流速度与油门之间的增益;Vp为螺旋桨处的来流速度㊂考虑到偏航角速度的影响,Vp可以表示为Vpl=Va+dprVpr=Va-dpr{(10)式中,Vpl和Vpr分别为左右螺旋桨处的来流速度;dp为螺旋桨到飞机对称面的距离㊂8第1期马振宇,等:全翼布局太阳能无人机滑跑特性分析与控制定义Δδp为油门差动量,左右油门可以表示为δpl=δp+Δδpδpr=δp-Δδp{(11)螺旋桨动力差动可以表示为ΔT=Tl-Tr=2ρSpCpK2pδpΔδp-2ρSpCpdpr(12)螺旋桨作用到飞机的力和力矩可以表示为:Fbp=Tl+Tr00[]T(13)Mbp=00ΔTdp[]T(14)当Δδp=0时,(12)式可以简化为ΔT=-2ρSpCpdpr,由于ρ,Sp,Cp,dp都大于0,双螺旋机设计能够为飞机带来额外的偏航阻尼㊂1.1.3㊀完善滑跑模型将无人机除了轮胎以外的部分视为刚体,忽略轮胎的重量,通过建立刚体六自由度模型来描述无人机的运动㊂无人机在滑跑过程中除了受地面和螺旋桨提供的力和力矩,还受到气动力㊁力矩和重力的作用㊂飞机基本的动力学㊁运动学方程和飞机气动㊁重力的作用方程在文献[7]中有详细介绍,因此这里不再赘述㊂1.2㊀滑跑特性分析2种布局的起落架在高低2种速度下受到大小为1N㊃m持续时间2s的航向力矩干扰时的响应曲线如图3所示㊂图3㊀2种不同布局的起落架在高低2种速度下滑跑受扰后的响应曲线由图3a)和图3b)可知在低速滑跑时,前轮自由转向布局受到航向力矩的影响时产生的侧向偏离和偏航角远大于前轮固支的布局㊂由(6)式可知,这主要是因为在速度较低时,航向角速度r的影响较大,前轮固支布局的前轮受到侧力的影响,会提供一定的航向阻尼㊂因此,在低速滑行时前轮自由转向的布局需要更少的控制力矩㊂由图3c)和图3d)可知在高速滑跑时,前轮固支的布局侧向偏离反而稍大于前轮自由转向布局㊂这是因为在高速时偏航角速度r对侧偏角的影响很小,轮胎提供的阻尼降低㊂同时受气动的影响,无人机出现较大的滚转角,进而左侧轮胎离地,前轮固支布局的右前轮受到的侧力能够提供部分的航向力矩㊂2㊀滑跑控制律设计滑跑控制律主要由偏航角控制器和轨迹跟踪器组成㊂2.1㊀偏航角控制器基于线性自抗扰控制理论设计偏航角控制器,具体由偏航角回路和偏航角速度回路组成,其结构如图4所示㊂图4㊀偏航角控制器结构不考虑滚转角和俯仰角的影响时,航向动力学方程可以写为严格仿射的形式̇ψ=ṙr=fr+brΔδp{(15)式中,fr为总和扰动,即待观测动态环节㊂设计偏航角回路的过渡过程环节(TD),该环节能有效减少控制过程中的超调㊂㊆ψref=fhan(ψref-ψcmd,̇ψref,rψ,h0)(16)式中,fhan为最速控制综合函数;rψ决定跟踪速度;h0为滤波系数;ψcmd为偏航角指令;ψref为过渡指令㊂设计偏航角回路的反馈环节,由于公式(15)第一项齐次,故使用线性反馈即可rc=Kψ(ψref-ψ+2πm)(17)式中,Kψ为反馈增益;m为整数使-π<ψref-ψ+2πm<π(18)㊀㊀设计偏航角速度回路的线性扩张状态观测器(LESO),式中β01,β02为待整定参数9西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第37卷er=^r-r^r=^Δr-β01er+brΔδp^Δr=-β02erìîíïïïï(19)设计偏航角速度回路的反馈环节Δ δp=[Kr(rc-r)-^Δr]b-1rΔδp=sat(Δ δp,-20%,+20%){(20)式中将动力差动幅度限制为ʃ20%㊂2.2㊀直线轨迹跟踪器文献[8]提出了基于向量场的直线轨迹跟踪方法,该方法相比于目前较为常用的L1轨迹控制器等目标点跟踪方法具有跟踪误差较小和使用范围不受距离限制等优点[12]㊂无人机与路径的示意图如图5所示㊂图5㊀无人机与目标路径的示意图图中,ψt为跑道的方向角;d为无人机到跑道的距离㊂向量场轨迹跟踪方法具体的数学表达式为ψcmd=ψt-ψɕ2πtan-1(Kdd)+2πn(21)式中,ψɕɪ(0,π/2]表示当d无穷大时向量场方向与跑道的夹角;Kd为距离的增益,Kd越小转弯过程越平滑;n为整数,使得ψcmdɪ[-π,π]㊂通过(21)式可以看出,向量场轨迹跟踪方法适用于速度基本保持不变的情况,不适用于起飞㊁降落滑跑等速度发生很大变化的情况,因此需要对公式进行改进,引入Kd= Kd/V(22)式中, Kd为新的增益参数,是一个正常数;V为无人机的速度㊂因此当速度增加时Kd减小,无人机的运动轨迹变得缓和㊂将(22)式代入(21)式可得ψcmd=ψt-ψɕ2πtan-1( Kdd/V)+2πn(23)3㊀仿真分析3.1㊀仿真条件与控制器参数研究所用的全翼布局太阳能无人机起飞重量15kg,平均气动弦长0.4m,翼展7m,螺旋桨动力差动的范围为20%,动力系统采用时间常数为0.02s的惯性环节代替㊂偏航角控制器参数:选取rψ=0.1,h0=0.01,Kψ=1,Kr=10,β01=100,β02=300㊂直线轨迹跟踪器的参数:ψɕ=π/4, Kd=0.5㊂3.2㊀偏航角控制器图6验证偏航角控制器在1m/s和10m/s的2种速度下对比前轮自由转向和前轮固支布局的控制效果㊂图6㊀2种前轮布局在不同速度下跟踪偏航角指令时,偏航角和螺旋桨动力差动响应曲线由图6a)和图6b)可知,在低速滑跑过程中,前轮自由转向的布局能够很好地跟踪偏航角指令,并且螺旋桨动力差动幅值较小㊂而前轮固支的布局由于螺旋桨动力差动饱和引起了较大的超调㊂因此,前轮自由转向布局更适合于无人机需要从机库自行移动到跑道等需要较长时间低速滑跑的情况,而前轮固支的布局则需要专门的运载工具㊂由图6c)可得,在高速度滑跑时,偏航角控制器具有很好的控制效果㊂图6d)表明,与低速情况相反,高速时前轮固支布局所需要的螺旋桨动力差动幅值更小,表明高速滑跑时前轮固支布局反而更有优势㊂3.3㊀直线轨迹跟踪器通过仿真起飞滑跑和降落滑跑过程中无人机对01第1期马振宇,等:全翼布局太阳能无人机滑跑特性分析与控制直线轨迹的跟踪能力来验证直线轨迹跟踪器对2种前轮布局的控制效果㊂起飞滑跑过程油门以每秒5%的速度从20%增加到80%,当速度大于12m/s时结束仿真㊂降落滑跑过程中油门始终维持在20%,当速度小于1m/s时结束仿真㊂图7㊀2种前轮布局在起降滑跑过程中的响应曲线由图7a)可得,在起飞滑跑过程中2种前轮布局都能有效跟踪直线轨迹,前轮自由转向布局的响应时间较快,但出现了轻微的超调㊂由图7b)可得,前轮固支的布局在2 5s时出现了控制输出饱和,但轨迹跟踪效果没有受到很大影响㊂与图7a)相比,图7c)表明降落过程中的轨迹跟踪响应速度较慢,这是由于在降落滑跑过程中,螺旋桨动力差动的效率较低㊂图7d)表明2种前轮布局形式都出现了控制器输出饱和,但都有明显跟踪直线轨迹的趋势,没有出现不稳定的情况㊂通过对比滑跑距离可以发现,全翼布局太阳能无人机的降落滑跑距离要大于起飞滑跑㊂在图7仿真条件的基础上,图8将模型中所有的气动导数正向拉偏20%,并且螺旋桨差动效率负向拉偏20%,同时t=0时刻加入sin(2t)N㊃m的航向干扰力矩后进行仿真,验证控制器的鲁棒性㊂图8㊀加入参数拉偏和扰动后,2种前轮布局在起降滑跑过程中的响应曲线对比图7与图8可得,虽然进行了气动参数拉偏㊁加入干扰力矩且减小了执行机构的效率,控制器依然能有效控制2种起落架布局的无人机完成起降滑跑㊂表明所设计的控制方法具有较好的鲁棒性,能够有效应对各种干扰㊂4㊀结㊀论1)通过合理设计控制方法,即使只采用螺旋桨动力差动,依然能够有效对前轮自由转向布局和前轮固支布局的全翼布局太阳能无人机起降滑跑过程进行控制㊂2)在低速滑跑过程中,与前轮固支布局相比,前轮自由转向布局具有更好的控制效果,无需其他运载工具就可实现自行移动,具有更好的自持能力㊂在中高速滑跑过程中,通过合理设计控制器,2种前轮布局形式都具有很好的控制效果㊂3)论文所设计的控制方法结构简单,鲁棒性较好,待整定参数较少,同时采用实际可测的物理量,具有较好的工程实现性㊂参考文献:[1]㊀FLITTIEK,CURTINB.PathfinderSolar⁃PoweredAircraftFlightPerformance[C]ʊ23rdAtmosphericFlightMechanicsConfer⁃ence,1998:4446[2]㊀SEONGYB,LIMJH,YEOMS,etal.HELIOS:SolarRightsAnalysisSystemforApartmentBuildings[J].Solarenergy,2006,80(6):723⁃741[3]㊀王勇,王英勋.无人机滑跑纠偏控制[J].航空学报,2008(增刊1):142⁃149WANGYong,WANGYingxu.LateralDeviationCorrectionControlforUAVTaxiing[J].ActaAeronouticaetAstronauticaSini⁃11西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第37卷ca,2008(suppl1):142⁃149(inChinese)[4]㊀王彦雄,周洲,邵壮,等.飞翼布局无人机滑跑纠偏控制[J].西北工业大学学报,2016,34(4):593⁃601WANGYanxiong,ZHOUZhou,SHAOZhuang,etal.LateralDeviationCorrectionControlforFlying⁃WingUAVTaxiing[J].JournalofNorthwesternPolytechnicalUniversity,2016,34(4):593⁃601(inChinese)[5]㊀邓寅平,范彦铭.无人机四轮滑跑纠偏控制系统设计与仿真[J].系统仿真学报,2008,20(21):5929⁃5935DENGYinping,FANYanming.DesignandSimulationofGroundTaxiingSystemforUAVwithFourWheels[J].JournalofSys⁃temSimulation,2008,20(21):5929⁃5935(inChinese)[6]㊀GAOZ.ScalingandBandwidth⁃ParameterizationBasedControllerTuning[C]ʊProceedingsoftheAmericanControlConference,2006:4989⁃4996[7]㊀BEARDRW,MCLAINTW.SmallUnmannedAircraft:TheoryandPractice[M].NewJersey,PrincetonUniversityPress,2012:28⁃59[8]㊀NELSONDR,BARBERDB,MCLAINTW,etal.VectorFieldPathFollowingforMiniatureAirVehicles[J].IEEETransonRobotics,2007,23(3):519⁃29[9]㊀SUJITP,SARIPALLIS,SOUSAJB.UnmannedAerialVehiclePathFollowing:aSurveyandAnalysisofAlgorithmsforFixed⁃WingUnmannedAerialVehicless[J].IEEETransonControlSystems,2014,34(1):42⁃59TaxiingCharacteristicAnalysisandControlforFull⁃WingSolar⁃PoweredUnmannedAerialVehicleMAZhenyu1,2,ZHUXiaoping2,ZHOUZhou31.SchoolofAstronautics,NorthwesternPolytechnicalUniversity,Xiᶄan710072,China;2.SchoolandTechnologyofUnmannedAerialVehicleLaboratory,NorthwesternPolytechnicalUniversity,Xiᶄan710065,China;3.SchoolofAeronautics,NorthwesternPolytechnicalUniversity,Xiᶄan710072,Chinaæèççöø÷÷Abstract:Tosolvethetaxiingcontrolproblemofthefull⁃wingsolar⁃poweredunmannedaerialvehicle(UAV)withoutfrontwheelsteeringservoandrudder,acontrolapproachusingdifferentialpropellerthrusttocontrolthetaxiingisproposedinthispaper.Firstly,thetaxiingmathematicalmodelsoftwokindsoffull⁃wingsolar⁃poweredUAVswiththefrontwheelsturningfreelyorfixedareestablished.Meanwhile,thetaxiingcharacteristicsoffull⁃wingsolar⁃poweredUAVindifferenttaxiingspeedsareanalyzed.Secondly,basedonthelinearactivedisturbancerejectioncontrol(LADRC)theory,ayawanglecontrollerisdesignedbyusingdifferentialpropellerthrustasthecontroloutput.Finally,astraightlinetrajectorytrackingschemewhichissuitablefortake⁃offandlandingtaxiingisdesignedonthebaseofimprovedvectorfieldtheory.Simulationresultsshowthatthedesignedcontrollerhasagoodcontroleffectonfull⁃wingsolar⁃poweredUAV stake⁃offandlandingtaxiingperiods,andbetterrobustness.Keywords:full⁃wing;solar⁃poweredUAV;differentialpropellerthrust;taxiingcontrol;trajectorytracking;linearactivedisturbancerejectioncontrol(LADRC);improvedvectorfieldtheory;design;simulation©2019JournalofNorthwesternPolytechnicalUniversity.ThisisanOpenAccessarticledistributedunderthetermsoftheCreativeCommonsAttributionLicense(http://creativecommons.org/licenses/by/4.0),whichpermitsunrestricteduse,distribution,andreproductioninanymedium,providedtheoriginalworkisproperlycited.21。
无人机滑跑短距起飞控制方法研究摘要:本文研究了无人机在地面滑跑短距离起飞的控制方法,旨在提高无人机的适应性和起飞效率。
首先,通过研究无人机模型,确定了控制方案,然后进行了仿真实验,探究了不同的控制驱动策略和控制器参数对起飞效果的影响。
实验结果表明,控制方法的有效性和优越性,并为实际应用提供了理论基础。
关键词:无人机;滑跑起飞;控制方法;控制器参数;仿真实验。
引言:随着无人机技术的不断发展,无人机的应用范围越来越广泛,同时对无人机的性能和功能也提出了更高要求。
地面滑跑起飞方式是一种比较常用的无人机起飞方式,但是对无人机的控制和驱动能力提出了更高的要求。
因此,研究无人机在地面滑跑短距离起飞的控制方法,提高起飞效率和适应性,对无人机的进一步应用和发展具有重要意义。
一、研究方法1、无人机模型无人机模型包括了无人机结构、动力系统、传动系统、控制系统等,针对地面滑跑起飞过程中的特点,对无人机模型进行了调整和完善,包括增加导轨等,以满足实验需求。
2、控制方案为了实现无人机在地面滑跑短距离起飞,需要确定控制策略和控制器参数。
本文采用模糊控制和PID控制相结合的方式,分别对滑跑和起飞过程进行控制,通过系统仿真和实验验证了该控制方案的有效性和迅捷性。
3、仿真实验基于Matlab/Simulink平台,建立了无人机地面滑跑起飞的数学模型,并进行了仿真实验,通过调整控制器参数和控制策略,分析了不同因素对起飞效果的影响,并对比分析了模糊控制和PID控制的差异性,为实际控制提供了理论依据。
二、仿真实验结果通过模拟仿真实验,得出以下结论:1、模糊控制和PID控制相结合的方式,能够有效提高无人机的起飞效率和适应性,减小了滞后现象,提高了控制精度。
2、控制器参数对起飞效果有明显的影响,特别是滑跑起始阶段的控制器参数,影响较大。
3、无人机地面滑跑起飞过程中,需要满足一定的起飞速度、加速度和抬轮速度等条件,控制器参数要根据实际情况进行调整。
龙源期刊网
无人机着陆滑跑数学模型与纠偏控制
作者:郝现伟杨业等
来源:《电机与控制学报》2014年第05期
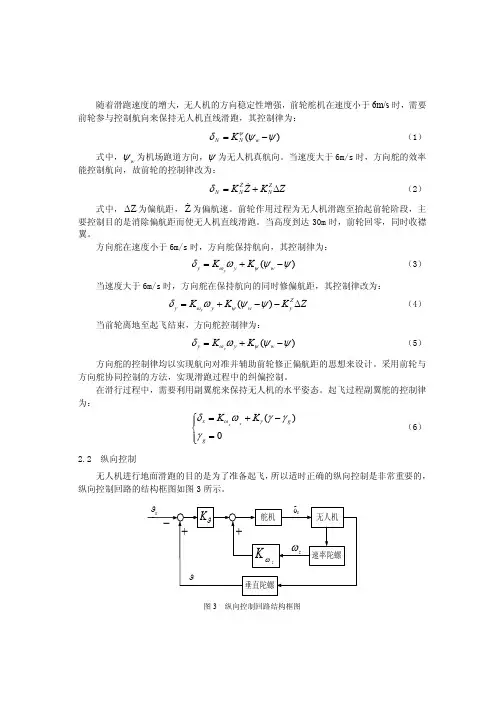
摘要:针对地面滑跑状态下的无人机滑跑纠偏的控制问题,提出采用方向舵偏转、主轮
差动刹车和前轮转向的联合纠偏控制方案和控制结构;通过纠偏控制分配,将多输入单输出无人机滑跑纠偏系统等效为具有单一虚拟纠偏舵面的单输入单输出系统,从而直接采用经典控制理论设计滑跑纠偏控制律参数;全面分析了无人机地面滑跑中所受地面力及力矩,同时考虑气动力及力矩,根据刚体动力学和运动学理论建立了全面反映无人机滑跑运动特性的无人机模型,并据此得到滑跑过程小扰动线性模型。
以某无人机为算例,进行地面滑跑建模及分析。
仿真结果表明,纠偏控制方案可实现全程滑跑纠偏的有效控制。
基于模糊控制的无人机滑跑起飞控制方法研究吴成富;闫冰;邵朋院【摘要】The safe take-off and landing of UAV are bottleneck issue for its development.We establish the mathe-matical model of taxiing take-off of a UAV with three-wheel landing gears and propose its overall taxiing take-off control scheme that includes the lateral taxiing deviation correction control law and the rudder longitudinal control law.To eliminate lateral deviation and lateral velocity, the lateral taxiing deviation correction control law has the in-terpolated variantp-arameter PID controller and the fuzzy controller , with the front wheel cooperating with the rud-der .The implementation of longitudinal control law is assisted by the elevator according to the UAV taxiing perform -ance.The simulation results, given in Fig.8, and their analysis show preliminarily that the taxiing take -off control scheme we designed has good control performance for large nonlinear systems and can effectively correct lateral taxi-ing deviation.Thus the UAV takes off smoothly;the taxiing take-off control scheme is reasonable and feasible .%针对三点式起落架无人机建立了地面滑跑的非线性数学模型,提出了总体的滑跑起飞控制方案,包括横侧向的滑跑纠偏控制律和纵向升降舵配合控制律。
Vol. 36 No. 5May 2019第36卷第5期2019年5月计算机应用与软件Computer Applications and Software无人机滑跑段抗侧滑控制策略研究付国强刘三才刘宪飞(北京航天无人机系统工程研究所北京100094)摘要 针对高速无人机地面滑行时容易产生侧滑冲出跑道的问题,研究侧滑产生的主要因素及机理,建立无人机滑跑段的动力学模型。
在前轮和方向舵联合纠偏的控制基础上,将侧滑角反馈引入航向内回路控制。
同时 优化刹车控制策略,提出一种能够有效抑制大侧滑的安全控制策略。
滑跑试验表明,该控制策略可有效抑制刹车 不当及强侧风引起的侧滑,提高无人机滑行时的抗侧滑性能,在滑跑试验中取得较好的应用效果。
关键词 无人机动力学建模纠偏控制抗侧滑滑跑试验中图分类号 TP273.5文献标识码 ADOI : 10. 3969/j. issn. 1000-386x. 2019. 05. 011ANTI-SIDESLIP CONTROL STRATEGY OF UAV TAXIINGFu Guoqiang Liu Sancai Liu Xianfei(Beijing Aerospace Unmanned Vehicles System Engineering Research Institute , Beijing 100094, China )Abstract Aiming at the problem that sideslip often occurred when high-speed UAV glided out of runway on theground , we- studied the main factors and mechanism of sideslip and established the dynamic model of UAV taxiing phase. On the basis of the control of the front wheel and rudder joint correction , the side slip angle feedback was introduced into the course inner loop control. Based on the control of combined the front-wheel steering and the rudder deflection , thesideslip angle feedback was introduced into the inner loop of the heading control. Meanwhile , the brake control strategywas optimized , and a safety control strategy was proposed to effectively restrain large sideslip. The skid test shows that the designed control strategy can effectively restrain the side slip caused by improper braking and strong cross wind , and improve the anti-side slip performance of UAV when taxiing. It achieves a better application effect in the sliding test.Keywords UAV Dynamic modeling Deviation control Anti-sideslip Taxiing experiment0引言地面滑跑是无人机起飞着陆过程中的一个重要阶段,无人机起降阶段滑出跑道的事故屡有发生UT 。
无人机姿态控制pid内外环控制原理无人机姿态控制PID内外环控制原理无人机姿态控制是指控制无人机在飞行过程中保持期望的姿态,如平稳飞行、悬停、转弯等动作。
PID控制是一种常用的控制算法,它通过反馈误差来调整控制器的输出,使系统达到期望的状态。
本文将介绍无人机姿态控制中的PID内外环控制原理。
PID控制器由比例项(P项)、积分项(I项)和微分项(D项)组成,它们分别对应控制器的输出与误差的比例关系、积分关系和微分关系。
在无人机姿态控制中,通常将姿态误差作为PID控制器的输入,输出控制量用于调整无人机的姿态。
在PID内外环控制中,内环控制器用于控制无人机的角速度,外环控制器用于控制无人机的姿态。
内环控制器和外环控制器之间存在耦合关系,内环控制器的输出作为外环控制器的输入。
通过将无人机的姿态误差转化为角速度误差,PID内环控制器可以计算出相应的角加速度,进而通过姿态动力学模型将角加速度转化为电机控制量。
PID内环控制器的作用是将无人机的角速度与期望角速度进行比较,计算出角速度误差,并根据误差大小调整控制器的输出。
比例项使无人机快速响应期望角速度,积分项消除系统静态误差,微分项抑制系统的震荡和过冲。
通过调整PID内环控制器的参数,可以实现无人机角速度的精确控制。
PID外环控制器的作用是将无人机的姿态与期望姿态进行比较,计算出姿态误差,并根据误差大小调整控制器的输出。
外环控制器的输入是PID内环控制器的输出,通过将角速度误差转化为姿态误差,PID外环控制器可以计算出相应的角加速度。
同样地,比例项、积分项和微分项分别起到快速响应期望姿态、消除系统静态误差和抑制系统震荡的作用。
在实际应用中,PID内外环控制器的参数需要进行调整,以达到最佳的控制效果。
调整参数的方法有很多种,常用的方法包括试验法、经验法和自整定法。
通过调整参数,可以提高无人机姿态控制的稳定性和精确度。
总结起来,无人机姿态控制PID内外环控制原理是通过PID控制器对无人机的角速度和姿态进行控制,实现无人机在飞行过程中保持期望的姿态。
采用滑动模式控制的无人机自稳定系统设计滑动模式控制(SMC)是一种广泛应用于控制系统中的非线性控制方法,该方法通过引入滑动模式来实现系统的自稳定。
本文将介绍采用滑动模式控制的无人机自稳定系统设计。
第一章引言无人机(Unmanned Aerial Vehicle,简称无人机)是一种不带人员搭载的飞行器,广泛应用于军事,航空,物流以及农业等领域。
在无人机的设计中,保证系统的自稳定性至关重要。
滑动模式控制作为一种强鲁棒性的控制方法,能够有效地实现无人机的自稳定,提高系统性能。
第二章无人机模型为了设计滑动模式控制器,首先需要建立无人机的模型。
无人机的模型通常包括动力学模型和控制模型。
动力学模型用于描述无人机运动的物理规律,而控制模型则用于控制无人机的动作。
第三章滑动模式控制基本原理滑动模式控制是一种非线性控制方法,其基本原理是通过引入滑动面来实现系统的自稳定。
滑动面是系统状态和状态反馈误差之间的一种函数关系,使得系统状态能够在滑动面附近进行快速的调节和稳定。
第四章无人机自稳定系统设计基于滑动模式控制原理,设计无人机自稳定系统需要考虑以下几个关键问题:滑动面的选择,滑动模式控制器的设计和参数调整。
4.1 滑动面的选择选择合适的滑动面是设计滑动模式控制器的第一步。
滑动面的选择应考虑到系统的动力学特性和稳定性要求。
通常可以根据无人机模型的状态变量和控制目标来选择滑动面。
4.2 滑动模式控制器的设计滑动模式控制器设计的目标是使系统状态能够稳定在滑动面上,同时保持系统的鲁棒性和灵敏度。
控制器的设计通常包括两个部分:滑动面控制和滑模控制。
滑动面控制通过调整滑动面的参数来实现系统的稳定。
滑模控制通过引入滑模变量来实现系统的响应速度和精度的提高。
4.3 参数调整在设计滑动模式控制器时,需要对控制器的参数进行调整。
参数调整的目标是使系统能够达到期望的性能指标,同时保证系统的稳定性和鲁棒性。
参数调整可以通过试错法,优化算法或者仿真实验等方法进行。
四旋翼无人机控制原理
四旋翼无人机的控制原理主要包括飞行姿态控制和飞行路径控制两个方面。
一、飞行姿态控制:
飞行姿态控制是指控制无人机在空中的姿态,即俯仰、横滚和偏航角。
实现飞行姿态控制主要依靠四个电动机的转速控制。
1. 俯仰控制:通过控制前后电机的转速差异,可以使无人机产生前倾或后倾的倾斜角度,从而实现俯仰控制。
2. 横滚控制:通过控制左右电机的转速差异,可以使无人机产生左倾或右倾的倾斜角度,从而实现横滚控制。
3. 偏航控制:通过控制相对的对角电机的转速差异,可以使无人机产生旋转运动,从而实现偏航控制。
二、飞行路径控制:
飞行路径控制是指控制无人机在空中的飞行方向和高度。
实现飞行路径控制主要通过控制电机的总体转速和倾斜角度。
1. 高度控制:通过调整电机总体转速,可以控制无人机的升降运动,从而实现高度控制。
2. 方向控制:通过控制四个电机的总体倾斜角度,可以使无人机向前、向后、向左或向右移动,从而实现方向控制。
同时,四旋翼无人机的控制还需要借助惯性测量单元(IMU)和飞行控制系统(FC)来实时采集和处理飞行姿态和飞行路径的数据,从而实现精准的控制。
总的来说,四旋翼无人机的控制原理是通过控制电机的转速和倾斜角度,实现飞行姿态和飞行路径的控制。
同时,借助惯性测量单元和飞行控制系统来实时采集和处理数据,提高飞行的稳定性和精度。