空压机控制程序设计
- 格式:pdf
- 大小:423.62 KB
- 文档页数:9
空压机使用说明书1.概述 ....................2.启动和运行程序 .........3.控制和仪表 .............4.润滑油、冷却器和油细分离器5.空气滤清器.............6.故障排除............... 90 93 95 104 105 1061.概述压缩机:原装进口的螺杆压缩机主机是一靠啮合的螺旋形转子进行压缩的单级容积式回转机械。
两转子都靠安装在压缩腔外的高额定负载转子轴承支承, 单 一宽度的圆柱滚子轴承装在吸气端承受径向载荷。
装在排气端的圆锥滚子轴承对 转子进行轴向定位并承受所有轴向载荷和剩余的径向载荷。
压缩原理(图1-1):压缩是通过主辅转子在一气缸内同时啮合来完成的。
主 转子有四个互成90°分布的螺旋形凸齿,辅转子有五个互成 60°分布的螺旋形 凹槽与主转子凸齿啮合。
空气入口位于压缩机气缸顶部靠近驱动轴侧。
排气口在气缸底部相反的一 侧。
图1—1是为了表示吸、排气口的反向视图,当转子在吸气口尚未啮合时,空气流入主转子凸齿和辅转子凹槽的空腔内,此时压缩循环开始。
(见图A )当转 子与吸气口脱开时,空气被封闭在主辅转子构成的空腔内, 并随啮合的转子轴向 移动,(见图B )当继续啮合,更多的主转子凸齿进入辅转子的凹槽,容积减少, 压力升高。
喷入气缸的油用以带走压缩产生的热量和密封内部间隙。
容积减少,压力升 高一直持续到圭寸闭在转子内腔中的油气混和物通过排气孔口排入油气桶内的时 候。
为了生成一个连续平稳无冲击的压缩空气流, 转子上的每一容积都以极高的 连续性遵循同样的“吸气一一压缩一一排气”循环。
压缩机系统的空气流程(图4— 1):空气进入空气滤清器,流经吸气卸荷阀进 入压缩机,经压缩后,油气混合物进入油气桶内,在那里,大多数带走的油通过转子子Sil 琴子A 涔P■.一 rt 汽图1 1压编^S 环棒汽口 C吸呵”口速度变化和撞击从空气中分离出来,并落入油气桶内。
空压机自动化控制方案设计空压机自动化控制方案设计一、引言本文档旨在设计一种空压机自动化控制方案,通过采用自动化控制系统,提高空压机的工作效率和精度,实现自动化生产。
二、设计概述2.1 目标本设计旨在实现以下目标:- 提高空压机的生产效率;- 提高空压机的稳定性和精度;- 实现空压机的自动化控制,减少人工干预;- 实现对空压机的远程监控和管理。
2.2 设计原则在设计空压机自动化控制方案时,需遵循以下原则: - 安全可靠:确保自动化控制系统稳定运行,保障人员和设备安全;- 高效节能:通过控制空压机的启停、负载调节等方式实现高效的能源利用;- 灵便可扩展:设计应考虑到将来系统的扩展和升级需求。
三、系统架构设计3.1 硬件组成本自动化控制系统的硬件组成包括:空压机、传感器、执行器、控制器和远程监控设备等。
3.2 软件设计本自动化控制系统的软件设计分为以下几个部份: - 空压机控制程序:实现对空压机的控制、监测和故障诊断等功能;- 数据采集与处理:负责获取各个传感器的数据,并进行相应的处理与分析;- 控制算法:根据采集到的数据,进行控制指令的与执行;- 远程监控与管理:支持远程监控和管理系统,可以通过网络实时监测和控制空压机。
四、系统详细设计4.1 空压机控制程序设计4.1.1 空压机启停控制:根据需求自动控制空压机的启停状态,减少无效运行时间;4.1.2 负载调节控制:根据实时需求调整空压机的负载,保持压缩空气供应的稳定性;4.1.3 故障诊断与报警:通过监测各个传感器的数据,及时识别故障并发出相应的报警信息。
4.2 数据采集与处理设计4.2.1 传感器选择和布局:根据生产过程需求选择合适的传感器,并合理布局;4.2.2 数据采集:实时采集各个传感器的数据;4.2.3 数据处理与分析:对采集到的数据进行处理与分析,提取实用信息。
4.3 控制算法设计4.3.1 控制指令:根据传感器数据和系统需求相应的控制指令;4.3.2 控制指令执行:将控制指令传输给执行器,实现对空压机的控制。
基于PLC的煤矿空压机控制系统设计设计煤矿空压机控制系统是煤矿生产过程中必不可少的一个环节,它的稳定性和可靠性对煤矿生产效率和安全性具有重要影响。
基于PLC(可编程逻辑控制器)的煤矿空压机控制系统设计,能够实现对空压机的自动化控制和监测,从而提高系统的稳定性和可靠性。
首先,对于煤矿空压机控制系统设计,我们需要考虑以下几个方面:1.空压机运行状态监测:通过传感器实时监测空压机的运行状态,包括转速、运行时间、温度和压力等参数。
PLC根据这些数据可以进行故障检测和预警,及时提醒操作人员进行维护和保养。
2.控制策略设计:根据煤矿生产需求,设计合理的控制策略。
根据工艺要求,设定压缩空气的压力范围和波动要求。
通过PLC的编程功能,可以设定运行参数和自动调整工作模式,以实现最佳的能耗和性能。
3.带载和无载运行切换:根据实际工作要求,需要设计带载和无载运行切换的功能。
通过PLC的控制,可以实现按需切换运行模式,提高能源利用效率。
4.故障响应和报警机制:针对空压机可能出现的故障情况,设计相应的故障检测和报警机制。
当空压机出现故障时,PLC能够发送报警信号,及时通知维修人员进行处理。
在系统设计过程中,可以采用以下步骤:1.确定功能需求和技术指标:根据具体的煤矿空压机控制要求,确定系统的功能需求和技术指标,包括运行参数、安全要求和可靠性要求等。
2.系统结构设计:根据需求和指标,设计系统的硬件结构和软件框架。
确定PLC的品牌和型号,选择适宜的传感器和执行器,并设计合理的通信接口和数据处理算法。
3.软件编程:根据系统设计要求,进行PLC的软件编程工作。
编写逻辑控制程序,实现各种控制功能和监测功能。
优化程序结构,提高系统的运行效率和可靠性。
4.系统测试和调试:在完成软件编程后,进行系统的测试和调试工作。
通过实际运行测试,验证系统的功能和性能是否满足需求。
根据测试结果进行相应的调整和优化。
5.系统运行和维护:系统投入运行后,进行日常的监测和维护工作。

复盛空压机控制系统操作使用说SINCE 1953高效节能型SA-220、250螺杆空气空压机控制系统使用说明书(中文液晶显示PLC控制)复盛实业(上海)有限公司( 10月)“FS AUTO SENTRY-ES+”控制器“FS AUTO SENTRY-ES+”控制器,它所有的功能是由可编程控制器(PLC)来控制。
这些功能包含了安全保护停机,空压机排气量调节,控制及警告维护讯息指示等。
操作键盘及显示器、流程图提供操作人员方便的逻辑操作及显示功能。
在启动之前,按“复位”键,将控制器设定进入准备状态,空压机现在能够经由按任何一种操作模式键启动运转。
运转以后,操作模式可经由按其它操作模式键来更改,更改后的操作模式会显示在显示窗的右下方。
在正常运转情况下,任何时间按”停机”键将使空压机停止运转。
且油气桶压力会先被释放,然后电机停止转动。
“FS AUTO SENTRY-ES+”可接受其它控制器遥控操作。
当经由其它控制器控制时,显示器将显示“远程”。
当荧屏上有其它显示时,连续按“返回”键可回到(正常)状态。
在运转中,空压机能够经由持续按住数秒操作模式键来使得空压机空载。
将此键放开后,空压机控制功能会恢复。
油气桶内压力需低于0.35 BAR(5PSIG),空压机才能够启动。
操作模式一般运转模式这种运转模式适用于在突然出现大量空压空气消耗或没有长期空车运转的工况,空压机控制系统会配合耗气量连续运转。
控制器设置于(容调)模式下,当消耗量降到低于空压机排量以下时,压力会升高,当压力升高到接近控制盘的设定压力时,ES+控制器会操作各电磁阀TVO(旋转阀打开)、TVC(旋转阀关闭)及IVO(进气阀打开)、IVC(进气阀关闭)来控制空压机的排气量与耗气量相匹配。
当耗气量变化时,控制器会相应地调节空压机,使其以最佳状态运转。
在一般及重负荷工况下,进气阀会保持全开状态,由旋转阀控制排气量。
在轻负荷工况下,旋转阀全开,而由进气阀控制排气量。
科技信息2008年第27期SCIENCE &TECHNO LO GY INFORMATION ●(上接第375页)2.5样品分析及回收率测定利用该方法对城区收集的降雨水样进行分析,各离子均有检出,进行加标回收实验,F -加标回收率在90.1%-107.2%之间,相对标准偏差小于9.5%;Cl -加标回收率在93.4%-105.1%之间,相对标准偏差小于4.3%;NO 3-加标回收率在96.1%-106.8%之间,相对标准偏差小于3.8%;SO 42-加标回收率在88.9%-110.2%之间,相对标准偏差小于7.8%。
3结论本文建立了利用离子色谱法测定降雨中四种阴离子的方法。
实验表明,方法操作简单,快速,结果准确可靠,多次用于降雨中阴离子的快速分析测定,效果良好。
【参考文献】[1]Small H,Stevens T S,Bauman W C.A nal Chem,1975,47:1801.[2]Trifiro A,S ac cani G,Zanotti A,et al.J Chromatogr A,1996,739(1-2):175-181.[责任编辑汤静]●一、引言我厂供风的主要设备是两台1974年生产的590KW 波兰产空压机。
该设备的风压控制系统“定风器”早在20多年前就损坏,我厂曾多次组织有关厂家及技术人员进行恢复,但一直未能解决这一难题。
由此造成该设备的排风量及压力得不到有效的控制,所以基本所有工作完全由风机操作工来手动控制,十分不便。
而且,由于没有风压控制系统,所以调控风压必须根据压力表的指示值来调控排气阀,压力高时把风排到大气中,以防压力容器发生危险事故,压力低时要马上加压,以确保正常生产。
就这样天天要往复排风平均30多次,这样,既造成了严重的能源浪费,又存在着严重的安全隐患。
操作者稍有不慎或误操作将不但会给生产造成损失,而且会危及人身安全。
而对用户来讲,由于经常排风而造成的压力不稳或偏低,直接影响了正常的生产,使得生产任务不能如期完成,导致用户很不满意,所以急需对其系统向安全节能方向研发。
M250-6KV(AB)空压机操作说明书上海英格索兰压缩机有限公司制造2002/06/28图号:99284994M250/6KV(AB_PLC)空压机是上海英格索兰压缩机有限公司根据用户的要求特殊设计制造的空压机.该空压机的控制部分由于选用的是AB公司生产的PLC及操作显示屏,这使得空压机的整体控制系统更具有工作稳定、操纵简单、自动控制程度高的特点.PLC 的 MODBUS(RS485)通讯模块能使用户的DCS系统监视空压机的运行状态.空压机是压力设备,任何不正确的操作都有可能造成人员及设备的伤害。
所以,空压机的操作人员在操作之前必须仔细阅读并理解本操作说明书中的各章内容。
本操作说明书将涉及的有关章节有:•M250-6KV(AB-PLC)控制器的主要组成元件•空压机运行参数设置•空压机的运行操作•空压机本机/远程/ISC控制•空压机故障停机报警•空压机警告信号•PLC MODBUS连网通讯控制一.M250-6KV(AB-PLC)控制器的主要组成元件1.PLC CPU (型号:1747-L531)--- 可编程序控制器;图号:99281586 (进口件,备件申请要提早60天)。
2.PLC/OUTPUT (型号:1747-OW16)--- PLC控制器的继电器式输出模块;图号:99281602 (进口件,备件申请要提早60天)。
3.PLC/INPUT (型号:1746-IB16) --- PLC控制器的信号输入模块(DC24V);图号:99281594 (进口件,备件申请要提早60天)。
4.PLC/ANALOG INPUT (型号:1746-NI4) --- PLC控制器的模拟量信号输入模块;图号:99281610 (进口件,备件申请要提早60天)。
5.PLC/MODBUS (型号:3150-MCM) --- PLC的通讯模块;图号:99283970 (进口件,备件申请要提早60天)。
6.PLC/PenelView300 (2711-K3A5L1) --- PLC的操作显示器;图号:99288052 (进口件,备件申请要提早60天)。
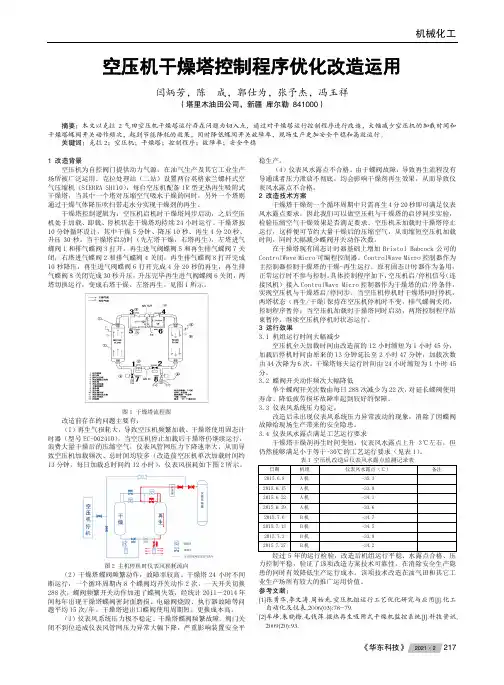
机械化工空压机干燥塔控制程序优化改造运用闫炳芳,陈 成,郭仕为,张予杰,冯玉祥(塔里木油田公司,新疆 库尔勒 841000)摘要:本文以克拉2气田空压机干燥塔运行存在问题为切入点,通过对干燥塔运行控制程序进行改造,大幅减少空压机的加载时间和干燥塔蝶阀开关动作频次,起到节能降耗的效果,同时降低蝶阀开关故障率,现场生产更加安全平稳和高效运行。
关键词:克拉2;空压机;干燥塔;控制程序;故障率;安全平稳1 改造背景 空压机为自控阀门提供动力气源,在油气生产及其它工业生产场所被广泛运用。
克拉处理站(二站)设置两台英格索兰螺杆式空气压缩机(SIERRA SH110),每台空压机配备IR 型无热再生吸附式干燥塔,当其中一个塔对压缩空气吸水干燥的同时,另外一个塔则通过干燥气体降压吹扫带走水分实现干燥剂的再生。
干燥塔控制逻辑为:空压机启机时干燥塔同步启动,之后空压机处于加载、卸载、停机状态干燥塔均持续24小时运行。
干燥塔按10分钟循环设计,其中干燥5分钟、降压10秒、再生4分20秒、升压30秒。
当干燥塔启动时(先左塔干燥,右塔再生),左塔进气蝶阀1和排气蝶阀3打开,再生进气阀蝶阀5和再生排气蝶阀7关闭;右塔进气蝶阀2和排气蝶阀4关闭,再生排气蝶阀8打开完成10秒降压,再生进气阀蝶阀6打开完成4分20秒的再生,再生排气蝶阀8关闭完成30秒升压,升压完毕再生进气阀蝶阀6关闭,两塔切换运行,变成右塔干燥、左塔再生。
见图1所示。
图1 干燥塔流程图改造前存在的问题主要有:(1)再生气损耗大,导致空压机频繁加载。
干燥塔使用固态计时器(型号EC-002410),当空压机停止加载后干燥塔仍继续运行,浪费大量干燥后的压缩空气,仪表风管网压力下降速率大,从而导致空压机加载频次、总时间均较多(改造前空压机单次加载时间约13分钟,每日加载总时间约12小时),仪表风损耗如下图2所示。
图2 主机停机时仪表风损耗流向(2)干燥塔蝶阀频繁动作,故障率较高。
阿特拉斯空压机控制屏控制程序的功能[打印] [关闭] 发布时间:[2009-11-19]程序/功能说明主屏幕简单地显示空压机的运转状态,是进入所有功能画面的出入口状态数据调出空压机的维护功能状况:停机.停机警告,维修期限快到的警告以及警告的数据,也可重新设定停机参数,马达超载和维修条件的数据.测量数据可调出:实际测量数据,还有如马达的超负荷保护这样一些输入数据计数器可调出:运行时间,带负荷运转小时数,马达开启次数,电脑运行时间数,负荷循环次数.试验试验显示屏修改设定修改以下设定:参数(如空载和负载时的压力)保护(如停机温度)维护计划.维护器调出维护计划并重新设定计时器已存数据调出上次关机,紧急停机时已存的数据1.5.2 主屏幕当开启电源开关时,主屏幕自动简单地显示空压机的操作状况.Delivery Air(输送空气)Bar(压力) 7.0 ↓Auto Loaded(自动负载)Menu(菜单) Unld(空载)F1 F2 F3如果功能键或↓几分钟不用的话显示屏就自动返回到主屏幕.无论在哪个子目录,只要按:Main就会返回到主目录.1.5.3 调出其他子菜单.从主目录开始: 用↓可快速浏览空压机的实际状态(见1.5.4节) .按Menu键(F1),供选择的数据就会跟在水平箭头后面:也可按横向移动箭头5来选择这个菜单或用↓来翻页到带有水平箭头的子目录为止,然后按水平键来选择这个菜单.1.5.4 迅速查看空压机的实际状态步骤1.从主目录开始(见1.5.2节),按↓键,就会显示相似下面的一个画面:Auto Operation(自动运转)Local Control(负荷控制)Tiner Active(激活计时器)Main (主画面) Help Xtra ↓F1 F2 F3图1.11所示为空压机实际状态显示第一行指出调节器的运行是自动还是手动的:<Auto Operation>表示调节器自动调节空压机的运转.如:Local(负载),Unlocal(空载),根据程序参数Sotp(停机)和 Restart(重启).<Man Operation>表示手动操作,如果在主屏幕上按了”Unload”键后调节器的自动压力控制就被打断了.第二行指出调节器是现场控制方式(Local control)还是远程控制方式(Remote control): <Local control>表示Start/Stop,load/unload(即开启/停止,负载/空载)的按钮是激活状态,可直接按.<Remote control>表示功能键是远方控制的,就地操作无效.第三行表示为计时器的开机停机命令是否在激活状态,见(1.15.13)2. 按↓键可以获得其它数据(如空压机的实际运行条件)1.5.5 状态数据菜单状态数据子目录给出了有关空压机保护功能的状态信息(如停机 .停机警告,维护器警告和一般警告)以及重新设定停止,马达超载和服务条件.步骤:从主屏幕开始(见1.5.2)按Menu(F1),用水平箭头选择状态数据.按横向移动键(LED中的5)1.5.5.1无信息存在在这种情况下,LED的7不存在,显示屏的信息表明所有条件正常(Fig1.12)All conditionsAre OKMenuF1 F2 F3图1.12状态数据屏的实例1.5.5.2 有停机信息存在在空压机停止时,LED中7会闪光.如果是由于空压机的出口温度过高导致的停机,就会显示以下屏幕: Element outletC 122Shd Max 120Menu** **RsetF1 F2 F3图1.13状态数据屏的实例1. 指示器(**)会闪光.屏幕显示传感器(空压机的出口)的实际可读温度(122℃),及空压机停机(Shd)设定(120℃).2. 可以继续翻页到其它菜单,检查其它参数值.当返回到数据菜单时,可供选择的(“Shutdowns”会闪光,按横向移动键5返回到停机屏幕来选择(“Shutdowns”).重新设定停机参数1. 关闭电源开关后处理问题,在修复完毕并且停机显示消失后,开启电源开关,按Rset(重新设定)键.2. 按Menu和 Main键返回主屏幕并按I键重新启动空压机.马达超载之重设1. 关闭电源开关并处理问题,过负荷继电器(F2)冷却后会自动重新设定,但冷却风扇的断路器(Q15)必须重置.开启电源开关,按Rset(重新设定)键.2. 按Menu和Main键返回主屏幕并重启空压机.1.5.5.3存在停机警告信息1.如有停机警告出现,LED上的7灯亮,会出现类似下面的屏幕:Delivery airBar 7.0*Shutd Warn*Menu** **UnldF1 F2 F3图1.14停机报警的实例2指示器(**)闪光和信息*Shutd Warn*会交替出现,无论空压机是空载还是带负载运行.3. 按Menu和横向移动键5来选择状态数据菜单:保护(Protection)会闪光.4. 按横向移动键5来选择报警闪光项.屏幕显示如下:Element outletC 116Shdw Max 110Menu** **F1 F2 F3图1.15停机报警的实例屏幕上说明空压机温度太高(116℃),参照第六节修复问题.5. 如有需要,按O键直到空压机停止为止.6. 关闭电源开关,检查并修复空压机.7. 当报警条件除去时,报警信号也会消失.1.5.5.4出现维护器报警信号1.LED上的7灯亮,会出现类似下面的屏幕,如图1.16所示:Delivery airBar 7.0*Serv Requir*Menu** **UnldF1 F2 F3图1.16报警屏幕的实例2指示器(**)闪光和维护器报警信号会交替出现,无论空压机是空载运行还是带负荷运行.3. 按Menu和横向移动键5来选择状态菜单:维护器项(Service),闪光4. 翻页并按横向移动键5来选择下面二报警闪光项:<Inputs>:如果维护器超出了预设的报警标准(如油分的最高压力露点).见8.2节.<Plans>:如果维护计划时间间隔超限.5. 停止空压机并关闭电源6. 如果维护器信息为上述的<Inputs>(油分故障):就更换分离器.开启电源,翻到状态数据菜单的<Inputs>并按Rset键,重新设定维护信息.7. 如果维护器信息为上述的<Plans>:执行有关指示计划的维修动作,重新设定1.5.15节里记述的有关计划的计时器.1.5.5.5 出现报警信号及处理1. LED上的7灯亮,在屏幕上会出现一个报警信息.2. 指示器(**)闪光和服务报警信号会交替出现,无论空压机是空载运行还是负荷运行.此警告指出:空压机的冷却水,冷却水的出口温度超过了设计报警温度.内置干燥机(配有干燥机的空压机),露点温度超出了报警温度.3. 停机4. 关闭电源,检查并修复空压机.1.5.6 测量数据菜单功能:按Menu(F1) 按↓到 Measured data 画面按横向移动箭头5激活菜单Delivery airBar 7.0Menu ↓F1 F2 F3图1.17状态数据屏的实例2按↓可见一组实际测量数据(见图1.9)3. 如果有一个传感器连接到了停机,维护器或报警功能上面的话,只要按横向移动箭头5就可以调出与其有关的实际测量数据.1.5.7 计数器菜单功能: 允许操作员调出:运行时间带负荷时间马达启动次数电脑运行时间步骤1. 从主屏幕开始(见1.5.2) 按Menu(F1)按↓到Counters画面按横向移动箭头5激活此菜单2. 按↓就可见到上面提到的数据.(也可见图1.9)1.5.8 试验菜单功能可修改图1.9提到的许多数据.步骤1. 从主屏幕开始(见1.5.2) 按Menu(F1)按↓到Modify setting画面,按横向移动箭头5激活菜单2. 水平箭头将指向Display test选项.3. 按→←第一条(负载压力)及它的设定都会出现4. 使用↓翻到水平箭头指向的已修改的参数.1.5.10.1 空/负载上下限压力修改压力段如果合适的话,操作员可以随空/负载压力的不同而设定二个压力段(1段和2段).1段的设定指示为:<Loading pressure>及<Unloading pressure>,2段的设定指示为:<Loading pressure2>及<Unloading pressure2>.例如:1 段压力设定:Loading pressur: 6.4barUnloading pressur: 7.0bar2 段压力设定:Loading pressur: 4.0barUnloading pressur: 6.0bar步骤1. 负载压力参数的设定1) 参照上节选择负载压力参数:Loading pressBar 6.0Menu Mod ↓F1 F2 F3图1.18为修改参数菜单3).Lim(F2)键可查看参数的上下限,用↓或↑调整压力参数值.4).按Prong(F1)编写输入新设定值,或按Canc(F3)取消修改操作.2. 修改空载压力的设定同上.3. 如果需要修改空/负载压力段2的话,则重复上述步骤..1.5.11 修改保护设定功能1. 修改保护设定停机保护(<Shd>)由于出口温度的问题停机警告(<Shdw>)由于出口温度的问题警告(<Warn>),如:冷却水回路或露点警告维护器报警(<Serv>),如:DP油分故障(最大压力降)2. 检查空压机的一些情况,如:马达超载通讯的状态.图1.9所示的参数表.注意:有些参数不能修改步骤1. 从主屏幕开始(见1.5.2)按Menu(F1)按↓到Modify setting画面,按横向移动箭头5激活此菜单2. 用↓翻页,水平箭头将指向Protection选项.3. 按→←第一条(Delivery air)及它的值都会出现.4. 使用↓翻到水平箭头指向的已修改的参数.1.5.11.1 温度上下限之设定修改1.参阅上节选择出口温度参数(Element outet):Element OutletC 94 →Shd Max 120Menu Mod ↓F1 F2 F3图1.20为修改参数菜单2.上屏幕显示的是正常温度94℃及停机温度120℃.按MOD(F2),数字120闪动,如图1.21所示:Element OutletC 120(闪动)Prog Lim Canc ↓F1 F2 F3图1.21为修改参数菜单3. Lim(F2)键可查看参数的上下限。
基于PLC的空压机自动控制系统的设计摘要PC机将设置的系统运行参数传送给PLC,PLC对采集的风包压力与设定值进行比较,通过智能控制运算后将控制信号送给变频器,控制变频器的启动、运行和停止。
关键词PLC;变频器;空压机1应用价值及意义4L-20/8型活塞式空气压缩机是一种利用电动机将气体在压缩腔内进行压缩并使压缩的气体具有一定压力的设备。
由于结构原理的原因,空压机自身存在着明显的技术弱点。
为此,本文引入PLC及变频器进行技术改进,全面提升系统性能。
2 硬件选型2.1PLC选型1)基本单元本系统所使用的可编程序控制器采用日本三菱公司生产的FX2N -128MR-A1型PLC。
2)扩展单元N0~N5为FX2N-8AD型模拟量输入模块,每个模块有8路模拟量输入通道,编号为CH1~CH8。
共计6×8=48路通道,供47路模拟信号输入使用。
缓冲寄存器的编号为0#BFM~31#BFM,各路通道所对应的缓冲寄存器依次为5#BFM~12#BFM,用以存放采样数据,通过PLC的FROM指令读取缓冲寄存器,并将所读取的数据写入PLC的数据存储单元,至此,便完成了A/D转换。
其中,每个特殊功能模块占用8个I/O点,共占用6×8=48个X输入点。
N6为FX2N-8DA型模拟量输出模块,有8路模拟量输出通道,编号为CH1~CH8。
共计1×8=8路通道,供6路模拟信号输出使用。
各路通道所对应的缓冲寄存器依次为5#BFM~12#BFM,用以存放通过PLC的TO指令写入缓冲寄存器的输出信号,至此,便完成了信号的D/A转换。
其中,每个特殊功能模块占用8个I/O点,共占用1×8=8个Y输出点。
N7为PLC的PID过程控制模块,每个模块可控制多个闭环,本系统的PID 控制对象有6个,故本模块只需通过PLC程序中的6个PID指令实施控制即可,他们是:VVVF变频器的4-5端之间4mA~20mA输出控制,5个控制主机进水回路的电调阀。
螺杆式空压机操作规程第一章总则第一条为了安全、高效地使用螺杆式空压机,保证设备正常运行,特制定本规程。
第二条螺杆式空压机的操作人员必须熟悉螺杆式空压机的工作原理和结构,掌握操作方法,具备一定的维修和故障处理能力。
第三条螺杆式空压机的操作必须严格按照本规程的要求进行。
第四条如果遇到本规程没有涉及到的问题,必须向设备管理人员咨询后方可进行操作。
第二章螺杆式空压机的操作第五条操作前,必须熟悉螺杆式空压机的操作规程和工作流程。
第六条在操作前,应检查设备是否处于正常工作状态,特别是检查油液、水分离器和过滤器的状态。
第七条开始操作前,应打开油液增量调节阀,根据实际情况调整油液增量。
第八条开始操作前,应打开发动机冷却液进气阀。
第九条操作人员必须熟悉空压机的操作仪表,特别是压力表和温度表的读数。
第十条操作过程中,应注意观察压力表和温度表的变化,及时调整操作。
第十一条操作过程中,应注意压力表的示数,在规定范围内操作。
第十二条操作人员应定期对油液和冷却水进行更换和检查,保证其正常工作。
第十三条操作中发现异常情况,应立即停机排除故障或报告设备管理人员。
第三章安全操作第十四条操作螺杆式空压机时,必须佩戴好安全帽和安全眼镜。
第十五条操作人员必须穿着工作服和防护手套,特别是进行维修和检修时。
第十六条操作人员不得戴有防护装置的设备进入螺杆式空压机的工作区域。
第十七条操作人员不得将工具放置在螺杆式空压机的工作区域,以免引起意外。
第十八条操作螺杆式空压机时,禁止拆除或更换设备上的任何安全装置。
第十九条操作人员在操作时,禁止将手伸入螺杆式空压机的工作区域。
第二十条在螺杆式空压机停止运行之前,操作人员禁止离开操作位置。
第二十一条在维修和检修时,必须先切断螺杆式空压机的电源,并进行安全检查。
第四章维护和保养第二十二条每天开机前必须先进行设备的检查和维护。
第二十三条每月至少进行一次油液和冷却水的更换。
第二十四条每季度必须进行一次大修,检查螺杆式空压机各部件的磨损和老化情况。
空压机控制程序设计郑丽菊摘要:介绍了我厂旧空压站四台空压机进行PLC控制系统改造的程序结构。
论述了空压机联锁跳车程序、开车程序、辅助油泵控制程序、压力(负荷)控制程序、防喘振控制程序的原理及实现方法。
关键词: 空压机 PLC 控制程序1、前言众所周知,一直以来空气压缩机的控制系统都采用专用控制器,COOPER空气压缩机的专用控制系统从QUADIII,QUAD97,QUAD2000,再到V ANTIAGE,都是单板机专用控制器,英格索兰空气压缩机亦然,采用的是MP3,CMC专用控制系统。
这些专用控制器都有两个共同的特点:1)程序保密;2)零配件价格昂贵。
给用户的维护使用带来很大的不便,维护成本很高。
是否可以采用目前应用很广泛,技术成熟,价格相对低廉很多的PLC做为空压机的控制系统呢?这个想法在很多年前便有人提出来了,但由于空压机控制有其特殊性,厂家对控制程序保密,很多用户都比较谨慎。
随着近几年,部分空压机厂家控制器采用了PLC,如三星、艾里奥利,虽然程序依然不对用户开放,用户维护起来依然不是很方便,但是已证明用PLC取代专用控制器是可行的。
那么,是否可以用PLC取代目前采用QUAD2000,CMC专用控制系统的COOPER、英格索兰空压机控制器呢?如何用PLC程序实现空压机控制,这就是本文将探讨的内容。
我厂旧空压站有4台空压机,分别独立进行控制,一台是英格索兰的,型号3CII80MX3,控制系统是CMC,另外三台是JOY空压机,型号TA60M330RRZ,控制系统为QUAD2000,系统互相无法进行通信实现集中统一监视和控制,使工艺无法实时监控空压机。
空压机控制系统为专用控制器,价格昂贵,使维修费用高,且都为淘汰产品,厂家已不生产,无备件来源。
同时控制系统已使用多年出现老化,已出现多次不知原因的故障现象和停车事故。
控制系统无历史记忆功能,难以进行事故分析。
以致多次出现事故停车后,找不到真正原因。
2010年总公司立项作为隐患整改项目,2011年4月完成改造。
基于变频器及PLC的空压机自动控制系统摘要:空压制冷系统主要包括为反应器提供压缩空气的空压机组和为精制提供冷量的制冷机组,运行期间车间内噪声偏大,职工正常操作及巡检过程存在安全卫生隐患。
空压机自动系统主要包括传感器系统、调节执行机构、PLC 系统、变频器、组态软件五大部分。
自控系统并非制冷机组系统所必须,但是通过完善的自控系统可以把体系的热平衡调整到最佳状态,减少人工干预,让系统更加平稳高效安全的运行,良好的设备运行状态对噪声的防治起到了辅助作用。
关键字:PLC 变频器自动控制当前人们对生活标准的要求越来越高,对舒适的生活环境和工作环境的要求也是如此。
各大电器设备生产商日渐认识到,只有让用户满意的产品,才是企业日后能够提高竞争力的核心产品。
尤其是在双螺杆空压机生产领域,如何降低双螺杆空压机噪声,提升用户使用满意度,是企业需要考虑的现实问题之一。
双螺杆空压机的噪音源包括三大类:机械噪音,电磁噪音,气动噪音。
电磁产生的噪声需要与电机研究相结合,而研究者们的目光主要集中在机械振动噪声和气流脉动噪声上[1]。
振动和噪声是不可分离的,振动是物质能量在一段时间内反复变化,通过弹性介质传播物体振动产生的声波而产生噪声的过程。
在现代机械工业体系中,对大功率、高转速的工业机械需求不断提高。
负责生产压缩空气的主要设备——空气压缩机,是车间中的一种关键设备。
空压机打开进气阀,待压力降至下限值时再重新工作。
但这种传统的控制过程其自动化程度较低,控制方法较为单一。
通常采用两点式控制(上下限),即空压机关闭进风阀进入卸载状态,当压力降至下限值时,空压机再打开进风阀,重新开始工作,当空压机气缸内的压力达到设定的上限值时,空气压缩机会打开进气阀,在储气罐压力低于设定的下限值时进入负载状态。
空压机在运行中排气量、压力常因生产车间用气变化而发生变化,造成空压机装卸载频繁、循环反复。
空气压力的变化不稳定,管路中的气压波动较大,这是受螺杆式空气压缩机上下限控制方式的影响[2]。
空压机控制程序设计郑丽菊摘要:介绍了我厂旧空压站四台空压机进行PLC控制系统改造的程序结构。
论述了空压机联锁跳车程序、开车程序、辅助油泵控制程序、压力(负荷)控制程序、防喘振控制程序的原理及实现方法。
关键词: 空压机 PLC 控制程序1、前言众所周知,一直以来空气压缩机的控制系统都采用专用控制器,COOPER空气压缩机的专用控制系统从QUADIII,QUAD97,QUAD2000,再到V ANTIAGE,都是单板机专用控制器,英格索兰空气压缩机亦然,采用的是MP3,CMC专用控制系统。
这些专用控制器都有两个共同的特点:1)程序保密;2)零配件价格昂贵。
给用户的维护使用带来很大的不便,维护成本很高。
是否可以采用目前应用很广泛,技术成熟,价格相对低廉很多的PLC做为空压机的控制系统呢?这个想法在很多年前便有人提出来了,但由于空压机控制有其特殊性,厂家对控制程序保密,很多用户都比较谨慎。
随着近几年,部分空压机厂家控制器采用了PLC,如三星、艾里奥利,虽然程序依然不对用户开放,用户维护起来依然不是很方便,但是已证明用PLC取代专用控制器是可行的。
那么,是否可以用PLC取代目前采用QUAD2000,CMC专用控制系统的COOPER、英格索兰空压机控制器呢?如何用PLC程序实现空压机控制,这就是本文将探讨的内容。
我厂旧空压站有4台空压机,分别独立进行控制,一台是英格索兰的,型号3CII80MX3,控制系统是CMC,另外三台是JOY空压机,型号TA60M330RRZ,控制系统为QUAD2000,系统互相无法进行通信实现集中统一监视和控制,使工艺无法实时监控空压机。
空压机控制系统为专用控制器,价格昂贵,使维修费用高,且都为淘汰产品,厂家已不生产,无备件来源。
同时控制系统已使用多年出现老化,已出现多次不知原因的故障现象和停车事故。
控制系统无历史记忆功能,难以进行事故分析。
以致多次出现事故停车后,找不到真正原因。
2010年总公司立项作为隐患整改项目,2011年4月完成改造。
成功改造的关键就是空压机控制程序的设计。
2控制系统结构图1是控制系统的结构图。
由三部分组成:1)检测仪表;2)PLC控制系统;3)执行元件。
核心是PLC控制系统,主要由五个程序构成。
图1 控制系统结构图3、程序设计本空压机的控制程序设计分成几块,实现不同的功能,主要包括:1)联锁跳车程序;2)开车程序;3)辅助油泵控制程序4)压力(负荷)控制程序;5)防喘振控制程序3.1联锁跳车程序设计联锁停车程序,是保护机组安全运行的程序,当机组运行参数达到危险值时,安全停机,避免机组设备损坏的程序。
联锁停机参数有振动,温度,润滑油温度和压力,电机轴承温度等。
联锁逻辑和参数说明如下:PLC 控制系统 执行元件 检测仪表图2 联锁逻辑图1)一级振动:正常运行时设定大于2.0跳车,一般电机启动时振动值会比较大,为保证顺利启动,在电机启动期间(25S内)跳车值为该设定值乘以二。
2)二级振动:根据机组性能设定一个限制值,正常运行时设定大于2.0跳车,一般电机启动时振动值会比较大,为保证顺利启动,在电机启动期间(25S内)跳车值为该设定值乘以二。
3)三级振动:根据机组性能设定一个限制值,正常运行时设定大于2.0跳车,一般电机启动时振动值会比较大,为保证顺利启动,在电机启动期间(25S内)跳车值为该设定值乘以二。
4)润滑油压力:保证润滑油压力大于要求设定值,当由于油泵故障或油路堵塞导致压力低于设定值时将跳机。
5)二级进气温度;二级冷却器冷却效果不佳时温度会升高,影响压缩机工作效率。
一般设定大于60度左右时跳机。
6)三级进气温度;三级冷却器冷却效果不佳时温度会升高,影响压缩机工作效率。
一般设定大于60度左右时跳机。
7)主电机故障:启动命令发出后25秒,如果电机还运行不起来则判断为电机故障,发出停车命令将启动回路断开。
8)润滑油温度;为保证润滑性能,润滑油温一般控制在21度到46度之间,超过这个范围则跳车。
9)主油泵故障:主电机启动一分钟后,如果润滑油压力达不到停辅助油泵的设定压力,则判断为主油泵故障需要停机。
10)电机轴承温度:避免电机轴承过热11)电机线圈温度:避免电机过热烧坏电机。
3.2 开车程序开车程序是判断机组状态参数正常,阀位处于正确位置,允许机组启动,并且启动后将阀位开到安全位置的程序。
图3 开车逻辑图开车逻辑说明:机组不存在联锁条件,旁通阀在启动位置(全开),入口阀在启动位置(全关),润滑油压大于120KPA,润滑油温大于22℃,入口阀、旁通阀都处于自动状态,机组满足以上条件允许启动。
3.3辅助油泵控制程序辅助油泵有自动/手动控制模式,当空压机启动时,辅助油泵自动转为自动方式,当空压机启动一分中内辅助油泵必须停止,否则判断为主油泵故障,机组联锁停机;主电机停止后辅助油泵马上启动。
3.4 压力(负荷)控制程序1)控制原理空压机负荷控制程序是空压机控制程序设计的核心。
具有自动双模式和恒压两种控制方式。
在自动双模式控制方式下,压缩机的排气压力被设定在某个系统所需要的压力值上,进口调节导叶在压缩机可调范围内能调节进口气量,使压缩机保持恒定的排气压力。
当到达喘振控制点后,进口导叶停止关小,使压缩机的排气压力上升到卸载压力设定点,此时压缩机将会卸载(进口调节导叶关闭,旁通阀打开)。
压缩机将一直保持卸载状态直到排气压力低于设定的最小压力值。
然后压缩机将重新加载至满流量运行,又开始一个新的循环。
在恒压控制方式下,压缩机的排气压力被设定在某个系统所需要的压力值上,进口调节导叶在压缩机可调范围内能调节进口气量,使压缩机保持恒定的排气压力。
当到达喘振控制点后,进口导叶停止关小,压缩机旁通阀开始打开,调节旁通阀的开度使排气压力仍保持在恒定值上。
压缩机将始终通过对进口调节导叶和旁通阀的无级调节保持恒定的排气压力。
2)程序设计。
负荷控制程序包括空载、加载、压力调节、卸载等阶段的控制程序。
通过控制入口阀和出口阀的开度达到控制目标。
图3就是在各阶段进、出口阀的动作过程。
控制逻辑说明如下:空载:空压机启动后,入口阀自动开到13%,如果没有加载,则暂停。
放空阀全开。
加载:选择加载后,入口阀以最小电流设定值为加载目标;达到该值后,入口阀暂停;旁通阀开始以设定压力为目标开始关闭。
旁通阀全关后,进入压力调节阶段。
压力调节:旁通阀全关后,入口阀再继续以设定压力为目标进行自动调节,同时入口阀开度受最大电流限制;如果压力过高,则入口阀开度关闭到最小电流就不再继续关小,而是通过旁通阀进行调节;如果压力升高太多,达到压力保护设定值,则放空阀增加15%开度。
卸载:卸载时,旁通阀快速打开放空,然后入口阀再逐渐关闭到13%。
空压机一般设计两种工作模式:恒压模式;自动双式模式。
两种模式不同之处就是,自动双式模式下,如果空压机处于空载运行,系统压力下降到再加载设定值一段时间,空压机会自动重新加载。
恒压模式则不会自动重新加载。
入口阀旁通阀图3 各控制阶段入口阀放空阀动作示意图上图是各控制阶段入口阀放空阀动作过程示意图。
各控制阶段说明如下:T0:空压机启动。
T0~T1:空压机空载阶段。
T1:开始加载。
T1~T2:入口阀以最小电流为目标加载。
T2~T3:放空阀以设定压力为目标加载。
T3~T4:压力调节阶段。
T4~`T5:放空阀参与压力调节。
T5:开始卸载。
3.5喘振控制程序。
1)控制原理喘振是离心式压缩机的一种特有的现象。
压缩机在工作过程中,当进入叶轮的气体流量小于机组该工况下的最小流量(即喘振流量)时,管网气体会倒流至压缩机,当压缩机的出口压力大于管网压力时,压缩机又开始排出气体,气流会在系统中产生周期性的振荡,具体体现在机组连同它的外围管道一起会作周期性大幅度的振动,这种现象工程上称之为喘振。
离心式压缩机发生喘振时,典型现象有:(1)压缩机的出口压力最初先升高,继而急剧下降,并呈周期性大幅波动。
(2)压缩机的流量急剧下降,并大幅波动,严重时甚至出现空气倒灌至吸气管道。
(3)拖动压缩机的电机的电流和功率表指示出现不稳定,大幅波动。
(4)机器产生强烈的振动,同时发生异常的气体噪声。
防喘振控制是一个重要的安全控制,防喘振系统是通过调节入口导叶开度和放空阀(防喘振阀)开度来控制空压机的流量和出口压力,目的是使空压机工作点始终处在限定的范围内,而不进入喘振区,以确保机组的安全运行。
一般来说空压机防喘控制的对象是放空阀(防喘振阀),一旦出口压力过高,空压机接近喘振区或发生喘振时,该阀自动打开。
空压机的防喘振曲线是在现场实测出来的,考虑到系统的动态特性、喘振发生得非常快,所以对控制系统、检测系统的扫描周期有很高要求,尤其是大型的空压机。
空压机的喘振曲线是机组实际测试得到的。
下图是典型的空压机性能曲线。
图4典型的双自动控制性能曲线图5典型的恒压控制性能曲线2)程序设计。
引起空压机喘振的原因有很多,但基本分为两类。
一是入口流量不足导致机组克服不了系统阻力;二是出口压力太高,一般是由于空气用量突然减少,导致出口压力上升,造成憋压。
所以防喘振控制程序是针对这两种因数设计的。
针对第一个原因采用限制入口阀开度的方法,防止过分节流。
针对第二种因素采用及时调节放空阀开度的方法。
程序设计原理见图7。
空压机防喘振控制程序的核心是负荷调节模块,设计了三个调节功能,在不同的工况采用不同的调节功能。
1)入口阀调压功能块。
在正常工况下起做用,即电流没接近最小电流设定值(最小电流是空压机性能决定的)。
在此工况下,负荷调节模块根据给定的系统压力进行调节,通过调节入口阀的开度使系统压力稳定在设定值。
2)放空阀调压功能块。
在电流接近最小电流设定值起作用,这种情况是在系统压力持续升高,入口阀持续关小,一直到接近最小电流设定值(2安的余量),此时开始进入放空阀调压模式。
调节过程是:系统压力增大时,放空阀打开,反之放空阀开度减小,如果压力上升太快,大于压力保护值,则直接将放空阀开度增大15%。
这样设计的理由是:在接近最小电流时,如果入口阀在继续关小,将导致入口流量不足,引起喘振;而在压力一升高就采取放空阀调压不利于节能。
所以这样的程序设计兼顾了机组安全和节能。
3)电流防喘振调节功能块。
在电流接近最小电流设定值起作用,这种情况是在系统压力持续升高,入口阀持续关小,一直到接近最小电流设定值(2安的余量)。
这个时候进入电流调节模式,以前一个电流测量采样值做为调节器设定值,即机组电流下降时增加入口阀开度,电流增加时减少入口阀开度。
直到电流离开这个区域。
4)喘振判断及保护程序。
虽然系统设计了防喘振控制程序,但是当干扰太大,调节系统反应不及,空压机还是会进入喘振区,此时控制系统必须及时反应,保证机组安全。
一般设定系统压降达到34.5KPa/300ms时,判断为机组进入喘振区,防空阀打开,入口阀关闭,机组自动卸载。