船舶操纵性1
- 格式:pptx
- 大小:1.06 MB
- 文档页数:27
第一章船舶操纵基础理论通过本章的学习,要求学员概念理解正确,定义描述准确,对船舶操纵性能够正确评估,并具有测定船舶操纵性能的知识。
根据船舶操纵理论,操纵性能包括:1)机动性(旋回性能和变速运动性能)2)稳定性(航向稳定性)第一节船舶操纵运动方程为了定量地描述船舶的操纵运动,我们引入船舶操纵运动方程,用数学方法来讨论船舶的运动问题。
一、船舶操纵运动坐标系1.固定坐标系Ox0y0z0其原点为O,坐标分别为x0,y0,z0,由于我们仅讨论水面上的船舶运动,因此,该坐标系固定于地球表面。
作用于船舶重心的合外力在x0,y0轴上的投影分别为X0和Y0对z0轴的合外力矩为N2. 运动坐标系Gxyz其原点为点G (船舶重心),坐标分别为x ,y ,z ,该坐标系固定于船上。
这主要是为了研究船舶操纵性的方便而建立的坐标系。
x ,y ,两个坐标方向的运动速度分别为u 和v ,所受的外力分别为X 和Y ,对z 轴的转动角速度为r ,z 轴的外力矩为N 。
二、 运动方程的建立根据牛顿关于质心运动的动量定理和动量矩定理,船舶在水面的平面运动可由下列方程描述:y 0⎪⎩⎪⎨⎧===ϕZ og o og o I N y m Y x m X该式一般很难直接解出。
为了方便,将其转化为运动坐标系表示,这样可以使问题大为简化。
经过转换,得:⎪⎩⎪⎨⎧=+=-=r I N ur vm Y vr u m X Z )()( 该方程看似复杂,但各函数和变量都与固定坐标系没有关系,因此,可以使问题大为简化。
三、 水动力和水动力矩的求解对于上述方程中的水动力和水动力矩可表示为:⎪⎩⎪⎨⎧===),,,,,,(),,,,,,(),,,,,,(δδδr v u r v u f N r v ur v u f Y r v u r v u f X N Y X经过台劳级数展开,可得X ,Y ,N 对各自变量的偏导数,称为水动力导数和水动力矩导数,它们可以通过船模试验求得。
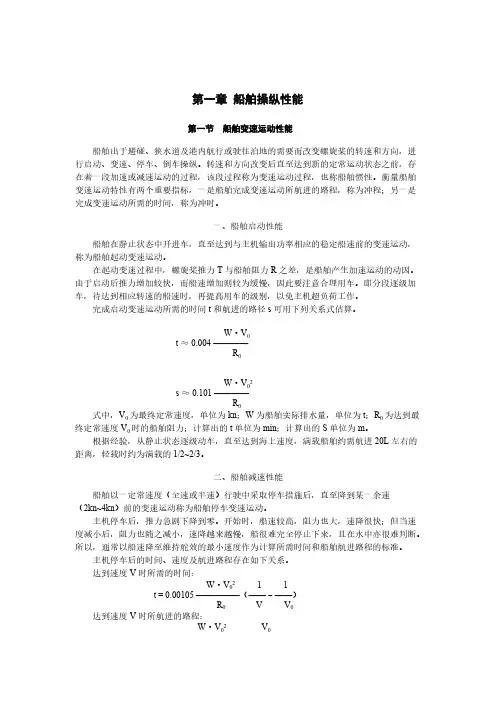
第一章船舶操纵性能第一节船舶变速运动性能船舶出于避碰、狭水道及港内航行或驶往泊地的需要而改变螺旋桨的转速和方向,进行启动、变速、停车、倒车操纵。
转速和方向改变后直至达到新的定常运动状态之前,存在着一段加速或减速运动的过程,该段过程称为变速运动过程,也称船舶惯性。
衡量船舶变速运动特性有两个重要指标,一是船舶完成变速运动所航进的路程,称为冲程;另一是完成变速运动所需的时间,称为冲时。
一、船舶启动性能船舶在静止状态中开进车,直至达到与主机输出功率相应的稳定船速前的变速运动,称为船舶起动变速运动。
在起动变速过程中,螺旋桨推力T与船舶阻力R之差,是船舶产生加速运动的动因。
由于启动后推力增加较快,而船速增加则较为缓慢,因此要注意合理用车。
即分段逐级加车,待达到相应转速的船速时,再提高用车的级别,以免主机超负荷工作。
完成启动变速运动所需的时间t和航进的路径s可用下列关系式估算。
W·V0t ≈ 0.004 ————R0W·V02s ≈ 0.101 ————R0式中,V0为最终定常速度,单位为kn;W为船舶实际排水量,单位为t;R0为达到最终定常速度V0时的船舶阻力;计算出的t单位为min;计算出的S单位为m。
根据经验,从静止状态逐级动车,直至达到海上速度,满载船舶约需航进20L左右的距离,轻载时约为满载的1/2~2/3。
二、船舶减速性能船舶以一定常速度(全速或半速)行驶中采取停车措施后,直至降到某一余速(2kn~4kn)前的变速运动称为船舶停车变速运动。
主机停车后,推力急剧下降到零。
开始时,船速较高,阻力也大,速降很快;但当速度减小后,阻力也随之减小,速降越来越慢,船很难完全停止下来,且在水中亦很难判断。
所以,通常以船速降至维持舵效的最小速度作为计算所需时间和船舶航进路程的标准。
主机停车后的时间、速度及航进路程存在如下关系。
达到速度V时所需的时间:W·V02 1 1t = 0.00105 —————(—— - ——)R0V V0达到速度V时所航进的路程:W·V02V0s = 0.075 ————— ℓn (——)R0V式中:R0为速度V0时船舶所受阻力,单位为t;W为船舶实际排水量,单位为t;t 的单位为min;S为m;速度单位为kn。
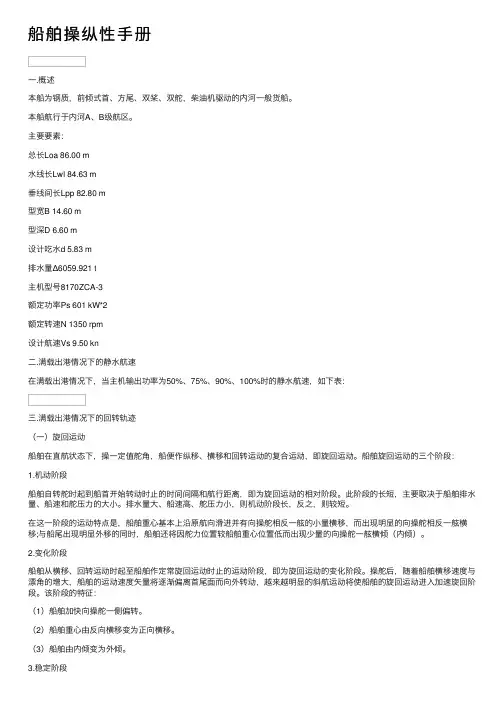
船舶操纵性⼿册⼀.概述本船为钢质,前倾式⾸、⽅尾、双桨、双舵,柴油机驱动的内河⼀般货船。
本船航⾏于内河A、B级航区。
主要要素:总长Loa 86.00 m⽔线长Lwl 84.63 m垂线间长Lpp 82.80 m型宽B 14.60 m型深D 6.60 m设计吃⽔d 5.83 m排⽔量Δ6059.921 t主机型号8170ZCA-3额定功率Ps 601 kW*2额定转速N 1350 rpm设计航速Vs 9.50 kn⼆.满载出港情况下的静⽔航速在满载出港情况下,当主机输出功率为50%、75%、90%、100%时的静⽔航速,如下表:三.满载出港情况下的回转轨迹(⼀)旋回运动船舶在直航状态下,操⼀定值舵⾓,船便作纵移、横移和回转运动的复合运动,即旋回运动。
船舶旋回运动的三个阶段:1.机动阶段船舶⾃转舵时起到船⾸开始转动时⽌的时间间隔和航⾏距离,即为旋回运动的相对阶段。
此阶段的长短,主要取决于船舶排⽔量、船速和舵压⼒的⼤⼩。
排⽔量⼤、船速⾼、舵压⼒⼩,则机动阶段长,反之,则较短。
在这⼀阶段的运动特点是,船舶重⼼基本上沿原航向滑进并有向操舵相反⼀舷的⼩量横移,⽽出现明显的向操舵相反⼀舷横移;与船尾出现明显外移的同时,船舶还将因舵⼒位置较船舶重⼼位置低⽽出现少量的向操舵⼀舷横倾(内倾)。
2.变化阶段船舶从横移、回转运动时起⾄船舶作定常旋回运动时⽌的运动阶段,即为旋回运动的变化阶段。
操舵后,随着船舶横移速度与漂⾓的增⼤,船舶的运动速度⽮量将逐渐偏离⾸尾⾯⽽向外转动,越来越明显的斜航运动将使船舶的旋回运动进⼊加速旋回阶段。
该阶段的特征:(1)船舶加快向操舵⼀侧偏转。
(2)船舶重⼼由反向横移变为正向横移。
(3)船舶由内倾变为外倾。
3.稳定阶段船舶作匀速圆周运动时即进⼊定常旋回运动阶段。
随着旋回阻尼⼒矩的增⼤,当船舶所受的转船⼒矩、漂⾓⽔动⼒转船⼒矩和阻尼⼒矩相平衡时,船舶的旋回⾓加速度变为零,船舶的旋回⾓速度达到最⼤值并稳定与该值,船舶进⼊稳定旋回阶段。
首向角:船舶纵剖面与OoXo轴的交角。
漂角:重心速度与GX轴正方向夹角。
航速角:重心瞬时速度矢量与OoXo轴夹角。
船舶操纵性是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变其航速、航向和位置的性能。
包括小舵角的航向稳定性、中舵角的航向机动性和大舵角的紧急规避性。
内容如下:1. 航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
2.回转性:表示船舶在一定舵角作用下作圆弧运动的性能。
3.转首性和跟从性:表示船舶应舵转首及迅速进入新的稳定运动状态的性能。
4. 停船性能:船舶对惯性停船和盗车停船的相应性能。
枢心:回转时漂角为零点、横向速度为零的点。
附加惯性力:作不定常运动的船舶,除本身受到与加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度,根据作用与反作用力原理,水对船体存在反作用力,这个力称为。
附加质量:附加惯性力是与船的加速度成比例的,其比例系数称为。
水动力导数:位置导数 Yv ,Nv:船体受到一个升力Yv,船体首部和尾部长力方向一致,v都都指向v的负方向,因此合力是一个较大的负值,Yv是一个较大的负值,而水动力矩由于首尾作用相抵消,其绝对值不会很大,因机翼的水动力中心在形成之前,首部作用占优,Nv是一个不大的负值。
加速度导数:Yv点是水动力Y相对于加速度在平衡状态下的变化率,正的加速度的船舶经受一个与加速度相反方向的水反作用力,因此Yv点是一个相当大的负值。
由于船首和船尾对Z轴产生的水动力力矩方向相反,因此水动力矩导数Nv点是一个不大的数值,其符号取决于船型。
旋转导数Yr ,Nr:由于船首和船尾水动力方向相反,因此水动力导数Yr的绝对值不是很大,其符号取决于船型,可正可负。
由于船体回转产生的水动力矩在船首尾有相同的方向,都是阻止船舶回转的,因此水动力矩导数Nr是一个很大的负值。
船舶操纵(一类三副)理论知识考核一、选择题1.船舶顺浪航行时,主要危害是:()[单选题] *A.拍底B.甲板上浪C.螺旋浆打空车D.尾淹√2在航行中发现舵机突然失灵,可采取的措施是:I .减速或停车;Il .使用应急舵;III.立即抛锚。
()[单选题]A. I、II√B.II、IIIC.I、IIID.I、II 、III3.船舶碰撞发生后,当破损部位确定后,应立即___,采取堵漏措施,并通知机舱排水。
()[单选题] *A.搁浅B.掉头C.弃船D.关闭邻近舱室的水密门窗√4.影响船舶航向稳定性的因素包括,①纵倾②舵工的操舵技能③船型④舵角。
()[单选题] *A. 1234B.13√C.23D. 2345.内河船舶驶靠码头,尾缆的主要作用是防止船舶()[单选题] *A.前移√B.后移C.外移D.内移6.船舶在风中的偏转方向取决于()[单选题] *A.风动力中心、船舶重心、水动力中心的相对位置√B.风动力中心的位置C.船舶重心的位置D.水动力中心的位置7.船舶在航道宽阔水域掉头,采用哪种方法经济合理()[单选题] *A.连续进车掉头√B.正倒车掉头C.进、退车掉头D.抛锚掉头8.对同一船舶,在其它条件相同时,各种锚泊方式下的偏荡从大到小的排列顺序为()[单选题] *A.八字锚、平行错、单锚B.单锚、平行锚、八字锚√C.平行锚、单锚、八字锚D.平行锚、八字锚、单锚9.船舶在横倾状态下低速航行,向高舷一侧用舵、舵效__。
()[单选题] *A.好B.差√C.不变D.不能确定10.前进中的双车船,采取下列何种操纵方法,才能使船舶向右旋回圈最小?()[单选题] *A.右满舵,左车和右车全速进车B.右满能,右车停车,左车全速进车C右满能,左车全速倒车,右车全速进车D.右满能,右车全速倒车,左车全速进车√11.有关图中船舶掉头的说法,正确的是:①掉头前,船舶应先向掉头的相反方向操舵,拉大档子,腾出水域;②船首转向90°时,即位置4时,应停车,控制船舶冲程,然后开倒车;③船舶处于位置3~4开倒车后,在后退中会出现“船尾找风”的现象。
船舶操纵性能: 1。
旋回圈要素(反移量,旋回初径,进距, 横距, 定常旋回直径, 滞距,漂角;2。
舵效(RUDDER EFFECT);3。
船舶控速性;4。
流的影响;5。
风的影响;6。
靠离泊注意事项;7。
抛锚操纵;8。
潮流;9。
侧推器的使用;一.旋回圈要素1.反移量(KICK)船舶重心偏离原航向线向操舵相反一侧横移的距离称为反移量;船尾反移量最大值约为船长的1/10~1/5,比重心处反移量要大得多;船速快,舵角大,反移量则大.吃水增加,反移量有所减小2.旋回初径(TACTICAL DIAMETER)3.进距(ADVANCE)4.横距(TRANSFER)5.定常旋回直径(FINAL DIAMETER)6.滞距(REACH)7.漂角(DRIFT ANGLE)船尾部漂角最大;漂角越大,旋回性能越好,旋回直径越小,降速越多,横倾角越大,转心也前移.浅水中漂角较深水中小.8.转心(PIVOTING POINT)转心的位置,在开始操舵时约在重心稍前处,随船舶旋回不断加快,转心位置向前移动;漂角大,旋回性能好的船舶,转心越靠前;由于船舶前进中旋回时转心在重心之前,因此在旋回时船首向内偏移量比船尾向外偏移量来得小;后退时,转心位于重心之后,与前进中回转时转心位置相对称.9.旋回中船速10.旋回时间11.旋回中横倾先内倾后外倾旋回圈要素的应用1.反移量-----在船舶驶离码头或并靠它船时,船首刚刚摆出泊位,如果很快操大舵角进车,则会产生较大反移量而导致尾部触碰码头或他船;2.旋回初径和进距可以用来估算用舵旋回掉头所需水域的大小。
二.舵效(RUDDER EFFECT)影响舵效的因素1.吃水-------船舶吃水增加,舵效变差;满载船转动惯量大,故启动不易停转难,因此,满载大型船舶操纵时,一般宜早用舵,早回舵,舵角较大。
2.舵速-------经验表明,人力操舵能保持舵效的最低航速为3KN,自动舵为8KN。
3.舵角和舵面积比--------加大操舵角是提高舵效的有效措施,舵面积比增大,舵效变好;4.纵倾和横倾---------首倾时舵效较差,适当尾倾时舵效较好;船舶有横倾时,向有横倾侧转向时舵效差,反之,舵效较好。