机械原理:第12章 机构组合与创新设计
- 格式:ppt
- 大小:664.00 KB
- 文档页数:29
机械原理组合机构机械原理是研究和分析机械工作原理和运动规律的学科,它是机械设计的基础课。
而组合机构是由若干个副动件与主动件相联结构成的,用于实现机械运动传递或者转换的装置。
组合机构可以实现各种不同的运动传递和转换,广泛应用于工业生产和日常生活中。
组合机构的分类有很多种,常见的有平面机构、空间机构、连杆机构等。
平面机构是在同一平面内运动的机构,常见的有曲柄滑块机构、摩擦滑块机构等;空间机构是在三维空间内运动的机构,常见的有球面机构、凸轮机构等;连杆机构是由若干个连杆构成的机构,根据连杆连接方式的不同,可以分为平面连杆机构和空间连杆机构。
在机械原理中,组合机构的设计和分析都离不开运动分析和力学分析。
运动分析主要是分析机构的运动学特性,包括机构的自由度、运动链、滞环以及运动规律等;力学分析主要是分析机构的力学特性,包括受力分析、力传递和传动比等。
这两个方面的分析对于组合机构的设计和优化都具有重要的意义。
组合机构的设计需要考虑诸多因素,如机构的传动比、运动速度、精确度、布置紧凑度、稳定性等。
传动比是指输入输出转速之比,决定了机构的运动规律和运动速度;运动速度是指机构中各副动件的运动速度,要满足机构的工作要求;精确度是指机构计算值和实际值之间的误差,要求精密度高;布置紧凑度是指机构结构的紧凑程度,要占用空间小;稳定性是指机构的稳定性和可靠性,要考虑机构的振动和噪声问题。
在组合机构的设计中,常见的机构有摩擦滑块机构、曲柄滑块机构、摩擦轮机构等。
摩擦滑块机构是利用摩擦力传递运动的机构,广泛应用于制动器、离合器等装置中;曲柄滑块机构是利用转动运动和滑动运动综合传递运动的机构,常见于往复运动的工作装置中;摩擦轮机构是利用摩擦轮与工件接触产生转动运动的机构,常用于升降装置和传送带等。
总之,机械原理中的组合机构是一种用于实现机械运动传递和转换的装置,通过运动分析和力学分析可以设计和分析各种组合机构。
在设计组合机构时需要考虑传动比、运动速度、精确度、布置紧凑度和稳定性等因素,常见的机构有摩擦滑块机构、曲柄滑块机构和摩擦轮机构等。

与创新设计1基本概念若干个单自由度基本机构的输入构件连接在一起,保留各自的输出运动;或若干个单自由度机构的输出构件连接在一起,保留各自的输入运动;或有共同的输入构件与输出构件的连接,称为并行连接。
根据并联机构输入与输出特性的不同,分为三种并联组合方法。
分类2各机构有共同的输入件,保留各自的输出运动的连接方式,称为Ⅰ型并联;I型并联机构并联组合框图各机构有各自的输入件,保留相同输出运动的连接方式,称为Ⅱ型并联分类2各机构有共同的输入运动和共同的输出运动的连接方式,称为Ⅲ型并联。
Ⅱ型并联机构并联组合框图Ⅲ型并联机构并联组合框图3组合示例Ⅰ型并联组合3组合示例Ⅰ型并联组合组合示例3Ⅱ型并联组合Ⅲ型并联组合示意图串联机构组合的目的主要是改变后置机构的运动速度或运动规律并联机构的组合目的主要是改变机构的动力性能,有时也用于实现运动的分解或运动的合成。
并联组合的基本原则1.对称并联相同机构实现机构的平衡2.实现运动的分解与合成3.改善机构受力状态4.同类机构或不同类机构都可以并联组合1对称并联相同机构,实现机构的平衡通过对称并联同类机构,可以实现机构惯性力的部分平衡与完全平衡。
利用I型并联组合可实现此类目的。
2实现运动的分解与合成I型并联组合可以实现运动的分解,II型并联组合可以实现运动的合成。
改善机构受力状态(1/2)3III型并联组合机构可使机构的受力状况大大改善,因而在冲床、压床机构中得到广泛的应用。
插入动画改善机构受力状态(2/2)3三个平动齿轮共同驱动一个外齿轮减速输出,不但增加了运动平稳性,而且改善了传力性能。
4同类机构也可以并联组合,不同类机构也可以并联组合为并联组合的设计提供了广泛的应用前景。
八、其他常用机构1.将连续回转运动转换为单向间歇转动的机构有、、。
2.当原动件作等速转动时,为了使从动件获得间歇的转动,则可以采用机构。
(写出三种机构名称。
)3.欲将一匀速回转运动转变成单向间歇回转运动,采用的机构有、、等,其中间歇时间可调的机构是机构。
4.齿式棘轮机构制动爪的作用是。
5.径向槽均布的槽轮机构槽轮的最少槽数为。
6.槽数z=4的外啮合槽轮机构,主动销数最多应为。
7.不完全齿轮机构在运动过程中传动比是,而槽轮机构在运动过程中传动比则是。
8.单万向联轴节的转动不均匀系数随两轴夹角β的增大而。
9.传动两相交轴间的运动而又要求两轴间夹角经常变化时可以采用机构。
10.能实现间歇运动的机构有、、。
11.在棘轮机构中,为使棘爪能自动啮紧棘轮齿根不滑脱的条件是。
12.在齿式棘轮机构中,棘轮的模数m是与之比;槽轮的运动系数k是指在主动拨盘的内,时间t与时间t之比。
13.图示棘轮机构棘爪自动啮入的条件是。
14.四槽单销的外槽轮机构的运动系数为。
15.轮齿式棘轮机构的转角可以调整。
(A)有级;(B)无级16.在单销四槽的外槽轮机构中,槽轮转动的时间与静止的时间之比为。
17.有一外槽轮机构,已知槽轮的槽数z=4,转臂上装有一个圆销,则该槽轮机构的运动系k,静止系数k=。
数18.径向槽均布的外槽轮机构,其径向槽数最少数为,利用槽轮上的作为槽轮机构中的定位装置,齿式棘轮机构棘齿齿面的偏角φ应棘爪与棘齿间的摩擦角。
19.槽轮机构是由、、组成的。
对于原动件转一周槽轮只运动一次的单销外槽轮机构来说,槽轮的槽数应不小于;机构的运动特性系数总小于。
20.主动盘单圆销、径向槽均布的槽轮机构中,槽轮的最少槽数为个,槽数愈多柔性冲击将;在一个运动周期中,其时间与之比称为槽轮机构的运动特性系数k。
21.用单万向节传递相交轴之间的运动时,其瞬时角速比,平均角速比。
22.双万向节传递相交轴之间的运动,在满足下列条件时其主、从动轴角速比为1:193(1);(2)。
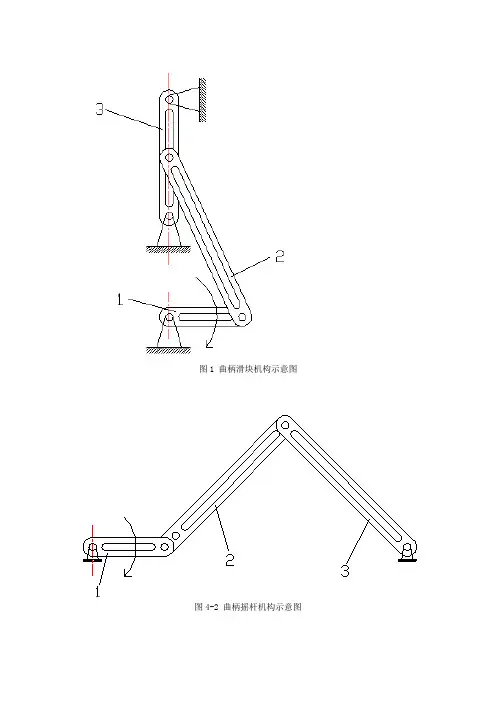
图1 曲柄滑块机构示意图图4-2 曲柄摇杆机构示意图
图4-3 内燃机机构示意图图4-4 精压机机构示意图
图4-5 牛头刨床机构示意图
图6 两齿轮—曲柄摇杆机构示意图
图7 喷气织机开口机构示意图图4-8 冲压机构示意图
图4-9 筛料机构示意图图4-10 插床机构示意图
图11 凸轮—连杆组合机构示意图图12 凸轮—五连杆机构示意图
图13 行程放大机构示意图图14 自卸货车翻转机构示意图
图15 齿轮齿条—双曲柄滑块机构示意图图16 盘型凸轮(尖端推杆)机构示意图
图17 冲压机构示意图
图18 双摆杆摆角放大机构示意图
图19 双摇杆机构示意图。
机械原理(江帆著)课后答案下载机械原理(江帆著)课后答案下载江帆主编的《机械原理(普通高等教育十二五卓越工程能力培养改革创新型规划教材)》按照项目驱动理论教学原则,为了配合驱动项目开展,采取“总一分一总”的思路进行章节安排,即先介绍机构基本知识、常用机构、机械运动方案设计及实例分析,再介绍机构结构分析、机构运动分析、机构力学分析、机构设计基础、机械效率与平衡及速度波动调节等基础知识。
在此基础上,介绍机构创新设计方法及优化方法,包括再生链的杆机构创新设计方法、TRIZ理论机构创新设计方法、机构优化设计等。
第1、3章为总体介绍,第4~11章为基础知识,第12章为机构创新设计与优化。
机械原理(江帆著):推荐理由前言第1章绪论1.1 机械、机器与机构1.2 课程目标与任务1.3 本课程驱动项目与导入项目参考1.4 本课程课堂教学组织顺序建议第2章机构组成、类型、应用及进展2.1 机构的基本组成2.2 机构运动简图2.3 机构类型及其应用思考题习题第3章机械运动方案设计及实例分析 3.1 机械运动方案设计过程3.2 机械产品的需求分析3.3 机械总功能分析与功能分解3.4 执行机构的运动协调设计3.5 机械系统运动方案选型设计3.6 机械运动方案设计实例分析思考题习题第4章机构的结构分析4.1 机构的自由度分析4.2 机构自由度分析中的关键问题4.3 机构的组成原理4.4 平面机构中高副用低副代替的方法 4.5 机构结构分类及结构分析思考题习题第5章机构运动学分析5.1 机构运动分析的目的.和方法5.2 基于速度瞬心法的机构速度分析5.3 基于矢量方程图解法的平面机构运动分析 5.4 基于解析法的平面机构运动分析思考题习题第6章机构力学分析6.1 机构力学分析的目的和方法6.2 构件上的作用力分析6.3 构件的惯性力和惯性力偶分析6.4 运动副中的摩擦力分析6.5 忽略摩擦时的机构受力分析6.6 考虑摩擦时的机构受力分析思考题习题第7章机械系统动力学7.1 机械的效率与自锁7.2 机械平衡7.3 机械系统动力学分析思考题习题第8章平面连杆机构设计8.1 平面四杆机构的基本知识8.2 平面四杆机构的设计思考题习题第9章凸轮机构设计9.1 凸轮机构的基本知识9.2 从动件的运动规律9.3 凸轮轮廓曲线的设计9.4 凸轮机构基本尺寸的设计思考题习题第10章齿轮机构及其设计10.1 齿廓啮合基本定律及渐开线齿形10.2 渐开线圆柱齿轮各部分名称和尺寸10.3 渐开线直齿圆柱齿轮机构的啮合传动10.4 其他齿轮机构的啮合特点思考题习题第11章轮系传动分析与设计11.1 各类轮系简介11.2 各类轮系传动比分析11.3 行星轮系的设计思考题习题第12章机构创新与优化设计12.1 机构创新设计12.2 机构优化设计思考题习题参考文献机械原理(江帆著):目录点击此处下载机械原理(江帆著)课后答案。
与创新设计前一个机构的输出构件与后一个机构的输入构件刚性连接在一起,称为串联组合。
基本概念1前一个机构称为前置机构,后一个机构称为后置机构。
组成2前置机构和后置机构都是单自由度机构。
特征3根据参与组合的前、后机构连接点的不同,可分为两种串联组合方法。
分类4连接点选在作简单运动的构件(一般为连架杆)上称为Ⅰ型串联;机构的串联组合框图前置机构后置机构I型串联分类4连接点选在作复杂平面运动的构件上,称为Ⅱ型串联。
机构的串联组合框图前置机构后置机构II型串联设计要点是二机构连接点的选择Ⅰ型串联机构组合示例55组合示例Ⅱ型串联机构1实现后置机构的速度变换实现后置机构速度变换的串联组合示例1实现后置机构的速度变换实现后置机构速度变换的串联组合示例实现后置机构的速度变换1什么机构适合做实现速度变换的前置机构?链传动机构带传动机构齿轮机构实现后置机构的运动变换2改变后置机构运动规律的串联组合示例铰链机构与滑块机构的串联2实现后置机构的运动变换导杆机构与滑块机构的串联改变后置机构运动规律的串联组合示例3在满足运动要求的前提下,运动链尽量短降低系统的机械效率, 运动链过长增大传动误差按组合框图由左向右进行,即先分析运动已知的基本机构,再分析与其串联的下一个基本机构。
分析顺序按框图由右向左进行,即先根据工作对输出构件的运动要求设计后一个基本机构,然后再设计前一个基本机构。
设计顺序谢谢观看。