两种不同坐标系之间的转换
- 格式:pdf
- 大小:38.15 KB
- 文档页数:1
地心地固系和东北天坐标系的速度坐标转换关系1. 引言地球上的物体运动可以通过不同的坐标系来描述。
在天文学中,常用的两个坐标系是地心地固系和东北天坐标系。
地心地固系是以地球质心为原点建立的,它是一个惯性坐标系,不随时间变化。
而东北天坐标系则是以观测者所在位置为原点建立的,它随着观测者的运动而变化。
当我们需要在这两个坐标系之间进行速度坐标转换时,就需要了解它们之间的关系。
本文将详细介绍地心地固系和东北天坐标系之间的速度坐标转换关系。
2. 地心地固系2.1 坐标定义地心地固系是以地球质心为原点建立的一个惯性坐标系。
其三个轴分别定义如下:•X轴:指向本初子午线方向,与赤道平面相交于XZ平面。
•Y轴:与X轴垂直,并指向东方。
•Z轴:与X、Y轴构成右手直角坐标系。
2.2 速度表示在地心地固系中,一个物体的速度可以用三个分量表示:Vx、Vy和Vz。
其中,Vx表示物体在X轴方向上的速度分量,Vy表示物体在Y轴方向上的速度分量,Vz表示物体在Z轴方向上的速度分量。
3. 东北天坐标系3.1 坐标定义东北天坐标系是以观测者所在位置为原点建立的一个局部坐标系。
其三个轴分别定义如下:•N轴:指向地理北极,与水平面垂直。
•E轴:与N轴构成右手直角坐标系,并指向东方。
•U轴:与N、E轴构成右手直角坐标系,并指向天空。
3.2 速度表示在东北天坐标系中,一个物体的速度也可以用三个分量表示:Vn、Ve和Vu。
其中,Vn表示物体在N轴方向上的速度分量,Ve表示物体在E轴方向上的速度分量,Vu表示物体在U轴方向上的速度分量。
4. 地心地固系到东北天坐标系的转换关系通过了解地心地固系和东北天坐标系各自的定义和特点,我们可以推导出它们之间的速度坐标转换关系。
4.1 转换矩阵地心地固系到东北天坐标系的转换可以通过一个3x3的旋转矩阵来表示,记作R。
该矩阵的每个元素可以表示为:R = [cosλ*cosφ, -sinλ, -cosλ*sinφ][sinλ*cosφ, cosλ, -sinλ*sinφ][ sinφ , 0 , cosφ ]其中,λ表示观测者所在位置的经度,φ表示观测者所在位置的纬度。
斜坐标系与直角坐标系的坐标变换1. 斜坐标系与直角坐标系的定义斜坐标系和直角坐标系是数学中常见的两种坐标系。
直角坐标系是我们通常熟悉的坐标系,用两个垂直轴(通常是x轴和y轴)来确定一个点的位置。
而斜坐标系则是通过一个斜轴和另一个垂直轴来确定点的位置。
在斜坐标系中,有一个轴倾斜于另一个,两个轴的交点不一定是原点。
2. 斜坐标系到直角坐标系的转换要将一个点从斜坐标系转换到直角坐标系,首先要找到斜坐标系的斜轴和垂直轴之间的夹角。
然后根据这个夹角,可以使用三角函数的关系将点的坐标从斜坐标系转换到直角坐标系。
具体的转换公式为:$$x' = x * cos(\\theta) - y * sin(\\theta)$$$$y' = x * sin(\\theta) + y * cos(\\theta)$$其中(x,y)是斜坐标系中点的坐标,(x’,y’)是直角坐标系中的坐标,θ是斜轴和垂直轴的夹角。
这样就可以将一个点在斜坐标系中的坐标转换到直角坐标系中。
3. 直角坐标系到斜坐标系的转换同样,如果要将一个点从直角坐标系转换到斜坐标系,也需要知道斜坐标系的斜轴和垂直轴的夹角。
转换公式为:$$x = x' * cos(\\theta) + y' * sin(\\theta)$$$$y = -x' * sin(\\theta) + y' * cos(\\theta)$$这样就可以将一个点在直角坐标系中的坐标转换到斜坐标系中。
4. 斜坐标系的应用斜坐标系在一些工程和物理领域中有一些特殊的应用。
比如在壳体结构设计中,斜坐标系能够更好地描述材料的受力情况,便于分析结构的稳定性。
在电力系统中,斜坐标系也可以用来分析电路中的相位关系,更好地控制电力系统的运行。
5. 结语斜坐标系和直角坐标系在数学和工程领域中都有着重要的作用。
了解坐标系之间的转换关系不仅可以帮助我们更好地理解问题,还可以应用到实际工程中去。
一、数据说明北京54 坐标系和西安80 坐标系之间的转换其实是两种不同的椭球参数之间的转换,一般而言比较严密的是用七参数布尔莎模型,即X 平移,Y 平移,Z 平移,X 旋转(WX),Y 旋转(WY),Z 旋转(WY),尺度变化(DM)。
若得七参数就需要在一个地区提供3 个以上的公共点坐标对(即北京54 坐标下x、y、z 和西安80 坐标系下x、y、z),可以向地方测绘局获取。
二、“北京54 坐标系”转“西安80 坐标系”的操作步骤启动“投影变换模块”,单击“文件”菜单下“打开文件”命令,将演示数据“演示数据_北京54.WT”、“演示数据_北京54.WL”、“演示数据_北京54.WP”打开,如图1 所示:1、单击“投影转换”“单下“S坐标系转换”“令,系统弹出“转换坐标值”“话框,如图2所示:图2⑴、在“输入”一栏中,坐标系设置为“北京54 坐标系”,单位设置为“线类单位-米”;⑵、在“输出”一栏中,坐标系设置为“西安80 坐标系”,单位设置为“线类单位-米”;⑶、在“转换方法”一栏中,单击“公共点操作求系数”项;⑷、在“输入”一栏中,输入北京54 坐标系下一个公共点的(x、y、z),如图2 所示;⑸、在“输出”一栏中,输入西安80 坐标系下对应的公共点的(x、y、z),如图2 所示;⑹、在窗口右下角,单击“输入公共点”按钮,右边的数字变为1,表示输入了一个公共点对,如图2所示;⑺、依照相同的方法,再输入另外的2个公共点对;⑻、在“转换方法”一栏中,单击“七参数布尔莎模型”项,将右边的转换系数项激活;⑼、单击“求转换系数”菜单下“求转换系数”命令,系统根据输入的3 个公共点对坐标自动计算出7个参数,如图3 所示,将其记录下来;然后单击“确定”按钮;图32、单击“投影转换”菜单下“编辑坐标转换参数”命令,系统弹出“不同地理坐标系转换参数设置”对话框,如图4 所示;图4在“坐标系选项”一栏中,设置各项参数如下:源坐标系:北京54 坐标系;目的坐标系:西安80坐标系;转换方法:七参数布尔莎模型;长度单位:米;角度单位:弧度;然后单击“添加项”按钮,则在窗口左边的“不同椭球间转换”列表中将该转换关系列出;在窗口下方的“参数设置”一栏中,将上一步得到的七个参数依次输入到相应的文本框中,如图4 所示;单击“修改项”按钮,输入转换关系,并单击“确定”按钮;接下来就是文件投影的操作过程了。
笛卡尔坐标系与极坐标系的变换关系坐标系是现代科学和数学领域中的一个基本概念。
它提供了一种描述空间中各点位置和特征的方法。
笛卡尔坐标系和极坐标系是大家最为熟知的两种坐标系统。
它们具有不同的特点和适用范围。
本文将详细探讨笛卡尔坐标系和极坐标系之间的变换关系。
一、笛卡尔坐标系和极坐标系的定义笛卡尔坐标系是由数学家笛卡尔所发明的,用于描述平面上各点的位置。
它由一组垂直于彼此的两条线段组成,这两条线段称为x轴和y轴。
它们的交点被称为坐标原点O。
我们可以通过在x 轴和y轴上选择一个单位长度,来确定任何一点的坐标。
当我们知道一个点的横纵坐标时,就能确定该点在平面上的位置。
极坐标系则是用于描述平面上各点的极坐标的系统。
它由一个起点O和一条从O开始的射线组成,射线称为极轴。
设任意一点P(x, y),与OP的夹角为θ,OP的长度为r,则该点P的极坐标表示为(r, θ)。
其中r表示点P到原点O的距离,θ表示点P到OP的夹角。
二、笛卡尔坐标系和极坐标系之间的变换关系在进行变换之前,我们需要先了解一下笛卡尔坐标系和极坐标系中的坐标关系。
在笛卡尔坐标系中,任何一点P(x, y)都可以表示成极坐标系中的(r, θ)。
其中,r的值可以通过勾股定理求得:r=sqrt(x^2+y^2)。
而θ可以通过以下公式计算得出:θ=arctan(y/x)。
可以发现,这些关系表明了笛卡尔坐标系和极坐标系之间存在着一定的联系。
为了方便在两个坐标系间进行转换,我们需要建立一个变换公式。
假设在笛卡尔坐标系中,点P(x, y)的坐标为(x0, y0),在极坐标系中点P的坐标为(r, θ)。
那么,利用上述公式,我们可以得到以下的变换关系:x=r*cos(θ)y=r*sin(θ)反之,在极坐标系中,通过以下公式可以把极坐标(x, y)转换成笛卡尔坐标系中的(x0, y0):x=r*cos(θ)y=r*sin(θ)需要注意的是,由于θ的值不能是负值,当点P(x, y)所处的象限与y轴重合时,可以通过将θ增加360度的方式进行转换。
笛卡尔坐标系和圆柱坐标系的转换1. 简介在数学和物理学中,坐标系是非常重要的概念。
不同的坐标系可以帮助我们更好地描述和计算空间中的点、向量和运动。
在笛卡尔坐标系中,一个点的位置由其在x、y和z轴上的坐标确定;而在圆柱坐标系中,一个点的位置由其距离原点的径向距离、该点与z轴的夹角以及该点在xy平面上的投影角度确定。
本文将介绍笛卡尔坐标系和圆柱坐标系之间的转换关系。
2. 笛卡尔坐标系笛卡尔坐标系是一种直角坐标系,由三个相互垂直的轴组成,通常被标记为x、y和z。
一个点在笛卡尔坐标系中的位置可以由其在x、y和z轴上的坐标值表示。
例如,点P的坐标可以表示为P(x, y, z)。
3. 圆柱坐标系圆柱坐标系是一种极坐标系,在二维平面上通过一个距离原点的径向距离、该点与z轴的夹角以及该点在xy平面上的投影角度来表示一个点的位置。
在圆柱坐标系中,一个点的位置可以表示为P(ρ, φ, z),其中ρ表示径向距离,φ表示与z轴的夹角,z表示该点在z轴上的高度。
4. 笛卡尔坐标系和圆柱坐标系的转换公式将一个点的坐标从笛卡尔坐标系转换为圆柱坐标系,或者将一个点的坐标从圆柱坐标系转换为笛卡尔坐标系,可以使用以下转换公式:笛卡尔坐标系转换为圆柱坐标系:•径向距离ρ的计算公式:ρ = √(x² + y²)•夹角φ的计算公式:φ = arctan(y/x)•高度z的计算公式:z = z圆柱坐标系转换为笛卡尔坐标系:•x的计算公式:x = ρ * cos(φ)•y的计算公式:y = ρ * sin(φ)•z的计算公式:z = z5. 示例假设有一个点P在笛卡尔坐标系中的坐标为P(3, 4, 5)。
现在我们将其转换为圆柱坐标系。
首先,根据转换公式计算径向距离ρ:ρ = √(3² + 4²) = 5然后,计算夹角φ:φ = arctan(4/3) ≈ 53.13°最后,高度z保持不变,仍为5。
p坐标系与z坐标系的相互转换在计算机图形学中,p坐标系(平面坐标系)和z坐标系(深度坐标系)是两种常用的坐标系,用于描述二维和三维空间中的图像。
1. p坐标系p坐标系是一个二维平面坐标系,由两个轴组成:x轴和y轴。
在p坐标系中,图像的位置用两个数值表示,分别是x和y坐标。
x轴表示水平方向,从左到右递增;y轴表示垂直方向,从上到下递增。
p坐标系的原点(0,0)通常位于图像的左上角,可以根据具体需求进行调整。
2. z坐标系z坐标系是一个三维空间中的坐标系,由三个轴组成:x轴、y轴和z轴。
在z坐标系中,图像的位置用三个数值表示,分别是x、y和z坐标。
x轴和y轴的意义与p坐标系中相同,而z轴表示图像的深度或距离。
z坐标系常用于三维图形的渲染和投影。
通过调整z坐标值,可以控制图像元素在三维空间中的相对位置和远近程度。
3. p坐标系到z坐标系的转换在将p坐标系转换为z坐标系时,需要考虑图像元素在三维空间中的位置。
一种常见的转换方法是将x、y坐标映射到z轴上。
假设p坐标系中的一个点的坐标为(x,y),则可以通过以下步骤将其转换为z坐标系中的坐标:1.选择一个适当的z值作为基准,例如将z值设置为0,表示将图像元素放置在z轴上。
2.将p坐标系中的x、y值分别映射到z轴的x、y轴上,可以使用线性映射或其他变换方式进行处理。
3.得到转换后的z坐标,表示该点在z坐标系中的位置。
需要注意的是,具体的坐标映射方式可以根据实际需求进行调整和优化。
例如,可以根据物体的距离远近调整z轴上的比例因子,以产生更逼真的图像效果。
4. z坐标系到p坐标系的转换将z坐标系转换为p坐标系时,需要将三维空间中的坐标投影到二维平面上。
一种常见的转换方法是将z轴上的坐标映射到p坐标系的x、y轴上。
假设z坐标系中的一个点的坐标为(x,y,z),则可以通过以下步骤将其转换为p坐标系中的坐标:1.如果z值表示了图像元素在z轴上的深度或距离,可以通过调整该值的比例因子来控制转换后的结果。
成都坐标与2000坐标转换关系摘要:1.成都坐标与2000坐标的概念与含义2.成都坐标与2000坐标的转换方法3.转换过程中的注意事项4.转换坐标在实际应用中的案例分享5.总结与展望正文:成都坐标与2000坐标是地理信息系统(GIS)领域中两种重要的地理坐标系。
成都坐标系是我国四川省成都市地方坐标系,而2000坐标系是我国采用的全球统一的高精度地理坐标系。
在实际应用中,这两种坐标系之间的转换关系具有重要意义。
一、成都坐标与2000坐标的概念与含义1.成都坐标系:成都坐标系原称为成都高程基准坐标系,是我国四川省成都市地方坐标系。
其X轴指向北,Y轴指向东,原点位于成都市。
该坐标系在我国西南地区应用广泛,尤其在四川省范围内。
2.2000坐标系:2000坐标系又称2000国家大地坐标系,是我国采用的全球统一的高精度地理坐标系。
该坐标系基于地球椭球体模型,采用CGCS2000椭球参数。
其X轴指向赤道,Y轴指向本初子午线,原点位于地球椭球体的质心。
二、成都坐标与2000坐标的转换方法1.坐标转换原理:成都坐标与2000坐标之间的转换主要包括两个方面,一是平面坐标转换,二是高程坐标转换。
平面坐标转换主要采用布尔莎七参数模型,高程坐标转换主要采用正常高系统转换。
2.转换步骤:(1)收集基准数据:获取成都坐标系和2000坐标系的基准数据,包括椭球参数、地球物理参数等。
(2)确定转换参数:根据基准数据,计算布尔莎七参数模型中的转换参数。
(3)实施坐标转换:利用转换参数,对成都坐标系数据进行坐标转换,得到2000坐标系数据。
(4)坐标精度检验:对转换结果进行精度检验,确保坐标转换的准确性。
三、转换过程中的注意事项1.确保基准数据的准确性:转换过程中,基准数据的准确性对转换结果具有重要影响。
因此,在开展坐标转换前,需确保基准数据的正确性。
2.合理选择转换模型:不同的转换模型适用于不同的地理区域。
在进行坐标转换时,要根据实际区域特点,选择合适的转换模型。
笛卡尔坐标系和经纬度转换从笛卡尔坐标系到经纬度的转换在地理学和导航领域中,经纬度是用来表示地球上某一点位置的坐标系统。
而在数学和物理学中,笛卡尔坐标系被广泛使用来描述平面上的点。
本文将介绍如何将笛卡尔坐标系转换为经纬度,并探讨这两种坐标系统的联系和应用。
一、笛卡尔坐标系的原理及应用笛卡尔坐标系是由法国数学家笛卡尔在17世纪提出的,它以两条互相垂直的坐标轴为基础,将平面分割为四个象限。
其中,水平轴被称为x轴,垂直轴被称为y轴。
在笛卡尔坐标系中,点的位置可以用一个有序的数对(x, y)表示,其中x表示点在x轴上的位置,y 表示点在y轴上的位置。
这种坐标系统在几何学、物理学、工程学等领域有着广泛的应用。
二、经纬度的原理及应用经纬度是用来表示地球上某一点位置的坐标系统。
经度是指地球上某点与本初子午线之间的角度,范围从0°到180°,东经为正,西经为负。
纬度是指地球上某点与赤道之间的角度,范围从0°到90°,北纬为正,南纬为负。
经纬度的表示方法通常以一个有序的数对(纬度, 经度)来表示,例如北京的经纬度是(39.9°N, 116.3°E)。
经纬度在地理学、导航系统、气象学等领域有着广泛的应用。
它可以用来确定地球上某一点的位置,计算两点之间的距离和方位角,以及进行地图绘制和导航定位等工作。
三、笛卡尔坐标系到经纬度的转换方法由于笛卡尔坐标系和经纬度坐标系是两种不同的坐标系统,它们之间存在一定的转换关系。
下面将介绍两种常用的转换方法。
1. XY平面到地球表面的转换方法需要知道地球的半径R。
假设地球是一个完美的球体,其半径约为6371公里。
假设要将笛卡尔坐标系中的点(x, y)转换为经纬度坐标系中的点(纬度, 经度)。
步骤如下:1)计算点到原点的距离r,即r = √(x^2 + y^2)。
2)计算点在地球上的纬度,即纬度 = asin(y / r)。
3)计算点在地球上的经度,即经度 = atan2(x, y)。
对于坐标系之间的转换,目前我们国家有以下几种:1、大地坐标(BLH)对平面直角坐标(XYZ);2、北京54全国80及WGS84坐标系的相互转换;3、任意两空间坐标系的转换。
坐标转换就是转换参数。
常用的方法有三参数法、四参数法和七参数法。
以下对上述三种情况作转换基本原理描述如下:1、大地坐标(BLH)对平面直角坐标(XYZ)常规的转换应先确定转换参数,即椭球参数、分带标准(3度,6度)和中央子午线的经度。
椭球参数就是指平面直角坐标系采用什么样的椭球基准,对应有不同的长短轴及扁率。
一般的工程中3度带应用较为广泛。
对于中央子午线的确定的一般方法是:平面直角坐标系中Y坐标的前两位*3,即可得到对应的中央子午线的经度。
如x=3888888m,y=388888666m,则中央子午线的经度=38*3=114度。
另外一些工程采用自身特殊的分带标准,则对应的参数确定不在上述之列。
确定参数之后,可以用软件进行转换,以下提供坐标转换的程序下载。
2、北京54全国80及WGS84坐标系的相互转换这三个坐标系统是当前国内较为常用的,它们均采用不同的椭球基准。
其中北京54坐标系,属三心坐标系,大地原点在苏联的普而科沃,长轴6378245m,短轴6356863,扁率1/298.3;西安80坐标系,属三心坐标系,大地原点在陕西省径阳县永乐镇,长轴6378140m,短轴6356755,扁率1/298.25722101;WGS84坐标系,长轴6378137.000m,短轴6356752.314,扁率1/298.257223563。
由于采用的椭球基准不一样,并且由于投影的局限性,使的全国各地并不存在一至的转换参数。
对于这种转换由于量较大,有条件的话,一般都采用GPS联测已知点,应用GPS软件自动完成坐标的转换。
当然若条件不许可,且有足够的重合点,也可以进行人工解算。
详细方法见第三类。
3、任意两空间坐标系的转换由于测量坐标系和施工坐标系采用不同的标准,要进行精确转换,必须知道至少3个重合点(即为在两坐标系中坐标均为已知的点。
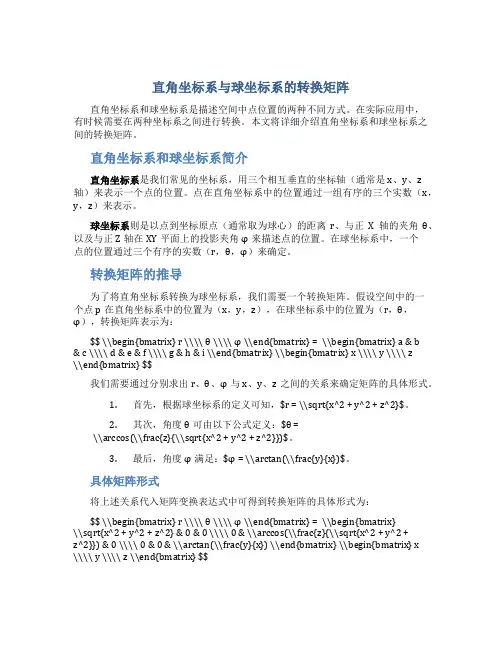
直角坐标系与球坐标系的转换矩阵直角坐标系和球坐标系是描述空间中点位置的两种不同方式。
在实际应用中,有时候需要在两种坐标系之间进行转换。
本文将详细介绍直角坐标系和球坐标系之间的转换矩阵。
直角坐标系和球坐标系简介直角坐标系是我们常见的坐标系,用三个相互垂直的坐标轴(通常是x、y、z 轴)来表示一个点的位置。
点在直角坐标系中的位置通过一组有序的三个实数(x,y,z)来表示。
球坐标系则是以点到坐标原点(通常取为球心)的距离r、与正X轴的夹角θ、以及与正Z轴在XY平面上的投影夹角φ来描述点的位置。
在球坐标系中,一个点的位置通过三个有序的实数(r,θ,φ)来确定。
转换矩阵的推导为了将直角坐标系转换为球坐标系,我们需要一个转换矩阵。
假设空间中的一个点p在直角坐标系中的位置为(x,y,z),在球坐标系中的位置为(r,θ,φ),转换矩阵表示为:$$ \\begin{bmatrix} r \\\\ θ \\\\ φ \\end{bmatrix} = \\begin{bmatrix} a & b& c \\\\ d & e & f \\\\ g & h & i \\end{bmatrix} \\begin{bmatrix} x \\\\ y \\\\ z\\end{bmatrix} $$我们需要通过分别求出r、θ、φ与x、y、z之间的关系来确定矩阵的具体形式。
1.首先,根据球坐标系的定义可知,$r = \\sqrt{x^2 + y^2 + z^2}$。
2.其次,角度θ可由以下公式定义:$θ =\\arccos(\\frac{z}{\\sqrt{x^2 + y^2 + z^2}})$。
3.最后,角度φ满足:$φ = \\arctan(\\frac{y}{x})$。
具体矩阵形式将上述关系代入矩阵变换表达式中可得到转换矩阵的具体形式为:$$ \\begin{bmatrix} r \\\\ θ \\\\ φ \\end{bmatrix} = \\begin{bmatrix}\\sqrt{x^2 + y^2 + z^2} & 0 & 0 \\\\ 0 & \\arccos(\\frac{z}{\\sqrt{x^2 + y^2 +z^2}}) & 0 \\\\ 0 & 0 & \\arctan(\\frac{y}{x}) \\end{bmatrix} \\begin{bmatrix} x\\\\ y \\\\ z \\end{bmatrix} $$结语通过以上推导,我们得到了直角坐标系与球坐标系之间的转换矩阵。
2000转84坐标系标题:详解2000转国家大地坐标系(84坐标系)文档正文:一、引言中国2000国家大地坐标系,简称CGCS2000或2000坐标系,是自2008年7月1日起正式启用的新一代地心坐标系,而84坐标系则通常指的是WGS 84坐标系统,它是全球广泛采用的地心坐标系统。
本文主要探讨两者之间的关联以及2000转84坐标系转换的相关知识。
二、2000国家大地坐标系简介2000国家大地坐标系以地球质心为原点,通过参考历元2000.0的地球动态模型(ITRF2000)实现与国际地壳参照框架的对接,采用了国际时间局提供的历元J2000.0的地球定向参数和IAU1976/1980的地球重力场模型,具有高精度、稳定性好、与国际接轨等特性。
三、WGS 84坐标系概述WGS 84坐标系是由美国国防部制定并维护的一种地心坐标系统,其原点同样位于地球质心,基准面则是通过多颗地球同步卫星定位系统GPS获取的数据构建。
WGS 84在全球导航定位、测绘地理信息等领域得到广泛应用。
四、2000转84坐标系转换由于CGCS2000和WGS 84虽然均属地心坐标系统,但由于建设年代、数据源及地球动力学模型等因素的不同,在实际应用中可能存在一定的坐标差异。
因此,当需要在两种坐标系之间进行数据转换时,一般会借助专业的坐标转换软件或算法,结合区域内的转换参数进行精确变换,确保数据的一致性和准确性。
五、结论随着我国测绘技术的不断发展和国际测绘领域合作的深化,2000国家大地坐标系与WGS 84坐标系之间的转换技术日臻成熟,有效地推动了地理信息数据的共享和交换。
对于相关行业工作者而言,理解并掌握这两种坐标系的特点及其转换方法,对于提高工作效率和保障数据质量具有重要意义。
请注意,尽管文中提到“2000转84坐标系”,但在实际应用中,从CGCS2000到WGS 84或者反向转换的具体操作需依据权威部门发布的转换参数和方法执行,不可随意转化。
坐标系转换关系
坐标系转换是将不同坐标系之间的坐标进行转换的过程。
在实际应用中,为了达到不同目的,常采用不同的坐标系。
例如,在地图制作中,我们通常使用地理坐标系(经纬度)来表示地球上的位置;在工程测绘中,我们则使用平面直角坐标系或其他局部坐标系来表示测量对象的位置。
为了实现不同坐标系之间的转换,需要了解它们之间的关系。
常见的坐标系转换包括以下几种:
1.地理坐标系与平面直角坐标系的转换:
由于地球并非一均匀球体,因此需要通过椭球体参数来确定地理坐标系与平面直角坐标系的转换关系。
2.不同平面直角坐标系之间的转换:
由于平面直角坐标系的选取并不唯一,不同国家和地区通常采用自己的坐标系。
在实际应用中,需要进行相应的转换。
3.局部坐标系与全局坐标系的转换:
工程测绘中,通常采用局部坐标系(例如UTM坐标系)进行测量,但在将测量结果与地理信息系统(GIS)中的地图进行整合时,需要将局部坐标系转换为全局坐标系(例如地理坐标系)。
以上所述是常见的坐标系转换关系,实际应用中还可能涉及更复杂的转换方式,例如大地网与平面网的转换等。
为了确保转换结果的准确性,需要根据具体情况进行算法的选择和精度的控制。
向量在不同坐标系的转换
向量在不同坐标系之间的转换可以通过坐标变换公式实现。
假设
有一个向量v,在坐标系A下的坐标为(x1,y1),在坐标系B下的坐标
为(x2,y2),则向量v在坐标系A下的坐标(x1,y1)可以通过以下公式
转换为在坐标系B下的坐标(x2,y2):
[x2; y2] = [a11 a12; a21 a22][x1; y1]
其中,矩阵[a11 a12; a21 a22]为从坐标系A到坐标系B的坐标
变换矩阵,该矩阵表示了坐标系A中的基向量在坐标系B中的表示,
可以通过基向量的旋转、缩放、翻转等变换得到。
具体来说,如果坐
标系B是通过坐标系A逆时针旋转θ度得到的,则
a11 = cosθ, a12 = -sinθ
a21 = sinθ, a22 = cosθ
如果坐标系B是坐标系A沿x轴和y轴分别放大k1和k2倍得到的,则
a11 = k1, a12 = 0
a21 = 0, a22 = k2
如果坐标系B是坐标系A关于x轴、y轴或者原点对称得到的,
则对应的元素为±1,具体的取值可以根据具体的情况确定。
需要注意的是,在坐标系转换过程中,向量的长度和方向是不变的,只是表示向量的坐标发生了变化。
因此,为了保证转换的正确性,应该保证坐标变换矩阵的行列式不为0,以确保该矩阵是可逆的。
同时,在实际的计算中,也需要注意精度问题,避免由于舍入误差导致的计
算错误。
通用坐标和自然坐标换算题通用坐标和自然坐标是地图制图中常用的两种坐标系统。
通用坐标是一种平面直角坐标系,以某一点为原点,以东西方向为X轴,南北方向为Y轴,单位为米。
自然坐标是以地球椭球体为基准,以经度和纬度表示位置的坐标系统。
在地图制图中,通常需要将自然坐标转换为通用坐标,或者将通用坐标转换为自然坐标。
下面以将自然坐标转换为通用坐标为例,介绍一下具体的换算方法。
首先,需要确定原点的经纬度和通用坐标系的原点坐标。
假设原点的经度为120度,纬度为30度,通用坐标系的原点坐标为(500000, 300000)。
其次,需要确定自然坐标点的经纬度。
假设自然坐标点的经度为121度30分,纬度为31度。
然后,根据经纬度计算出该点的高斯投影坐标。
高斯投影是一种将地球表面投影到平面上的方法,可以将经纬度坐标转换为平面坐标。
高斯投影的具体计算方法比较复杂,需要使用专业的地图制图软件或者工具进行计算。
最后,将高斯投影坐标转换为通用坐标。
通用坐标系的原点坐标和高斯投影坐标的原点坐标不同,需要进行平移和缩放。
具体的计算方法如下:X = k * (x - x0) + X0Y = k * (y - y0) + Y0其中,k为比例尺,x和y为高斯投影坐标,x0和y0为高斯投影坐标系的原点坐标,X0和Y0为通用坐标系的原点坐标。
通过以上的计算,就可以将自然坐标转换为通用坐标了。
需要注意的是,不同的地图制图软件或者工具可能使用不同的坐标系统和计算方法,因此在进行坐标转换时需要选择合适的工具,并且要仔细核对计算结果,避免出现误差。
总之,通用坐标和自然坐标的转换是地图制图中常见的操作,掌握好转换方法可以提高地图制作的效率和准确性。
新笛卡尔坐标与极坐标系的转换在数学和物理学中,坐标系统是描述空间中点位置的方法。
其中,笛卡尔坐标系和极坐标系是两种常见的坐标系统。
本文将介绍新笛卡尔坐标与极坐标系之间的转换方法。
一、新笛卡尔坐标系新笛卡尔坐标系是笛卡尔坐标系的一种变形,它在描述平面上的点位置时采用了不同的坐标轴。
新笛卡尔坐标系的坐标轴与笛卡尔坐标系的坐标轴相互垂直,但其单位长度可以不同。
为了简化问题,我们将新笛卡尔坐标系的坐标轴与笛卡尔坐标系的坐标轴保持平行。
在新笛卡尔坐标系中,一个点的位置可以由两个数值表示,分别是该点在新笛卡尔坐标系的x轴和y轴上的坐标值。
假设一个点的坐标为(x, y),其中x表示点在新笛卡尔坐标系的x轴上的坐标值,y表示点在新笛卡尔坐标系的y轴上的坐标值。
二、极坐标系极坐标系是一种用极径和极角来描述平面上点位置的坐标系统。
在极坐标系中,每个点的位置由两个数值表示,分别是该点到原点的距离和该点与极轴的夹角。
在极坐标系中,一个点的位置可以用(r, θ)来表示,其中r表示点到原点的距离,θ表示该点与极轴的夹角。
需要注意的是,极径r必须是非负数,而极角θ通常用弧度制表示。
三、新笛卡尔坐标系到极坐标系的转换将一个点的新笛卡尔坐标(x, y)转换为极坐标(r, θ)的过程可以通过以下公式完成:r = √(x^2 + y^2)θ = arctan(y / x)其中,√表示开平方,arctan表示反正切函数。
四、极坐标系到新笛卡尔坐标系的转换将一个点的极坐标(r, θ)转换为新笛卡尔坐标(x, y)的过程可以通过以下公式完成:x = r * cos(θ)y = r * sin(θ)其中,cos表示余弦函数,sin表示正弦函数。
五、示例假设有一个点A,在新笛卡尔坐标系中的坐标为(3, 4)。
我们可以通过上述转换公式将其转换为极坐标系中的坐标。
首先计算极径r:r = √(3^2 + 4^2) = √(9 + 16) = √25 = 5然后计算极角θ:θ = arctan(4 / 3)通过计算得到的结果为θ ≈ 0.93弧度。
地磁坐标系和地理坐标系换算关系地磁坐标系和地理坐标系是两种不同的坐标系统,用于描述地球上的位置和方向。
它们在地理和导航领域中起着重要的作用。
本文将深入探讨地磁坐标系和地理坐标系之间的换算关系,并分享对这两个坐标系的理解和观点。
1. 地磁坐标系(Geomagnetic Coordinate System)地磁坐标系是一种以地球磁场为基础的坐标系统,用于描述地球上的位置和方向。
它主要用于研究地球磁场、磁层物理、空间天气等领域。
地磁坐标系通常由地磁纬度、地磁经度和地磁高度三个参数表示。
地磁纬度(Geomagnetic Latitude)是指任意点在地磁赤道平面上的纬度角度,以地磁赤道为0度。
地磁经度(Geomagnetic Longitude)是指从地磁北极到该点的线与地磁子午面的夹角。
地磁高度(Geomagnetic Altitude)是指该点相对于地磁赤道的高度。
2. 地理坐标系(Geographic Coordinate System)地理坐标系是一种以地球自转轴和地球表面为基础的坐标系统,用于描述地球上的位置和方向。
它是一种经度-纬度坐标系统,可以精确定位地球表面上的任意一点。
地理坐标系通常由纬度、经度和海拔三个参数表示。
纬度(Latitude)是指地球上某一点与赤道之间的角度,以赤道为0度,北纬为正,南纬为负。
经度(Longitude)是指通过该点和地球自转轴的平面与原点经过的经线之间的夹角。
海拔(Elevation)是指该点相对于一个特定的参考面的高度,通常是相对于海平面的高度。
3. 地磁坐标系和地理坐标系的换算关系地磁坐标系和地理坐标系之间存在一定的换算关系,可以通过一些数学公式和转换参数实现坐标的互相转换。
地磁纬度和地理纬度之间的关系可以通过磁纬度修正公式计算得出。
地磁纬度修正公式考虑了地球自转和地磁场倾角的影响,可以将地理纬度转换为地磁纬度。
地磁经度和地理经度之间的关系可以通过磁经度修正公式计算得出。
坐标与西安坐标相互转换的两种方法坐标转换是将一些地理位置的坐标系转换为另一个坐标系的过程。
西安坐标是中国大陆常用的三度带高斯投影坐标系,用于测绘和地理信息系统等领域。
在实际应用中,有时需要将其他坐标系的坐标转换为西安坐标,或者将西安坐标转换为其他坐标系。
下面将介绍两种常用的坐标与西安坐标相互转换的方法。
方法一:通过地理信息系统软件进行转换地理信息系统软件(GIS)是一种用于存储、管理、分析和显示地理空间数据的工具。
通过使用GIS软件,我们可以方便地进行坐标系统的转换。
步骤如下:1. 打开地理信息系统软件(如ArcGIS、QGIS等)。
2.选择“坐标转换”或类似的工具。
3.根据需要选择源坐标系和目标坐标系。
4.输入源坐标或选择源坐标文件,点击转换。
5.程序将自动进行坐标转换,并生成目标坐标。
需要注意的是,在使用这种方法进行坐标转换时,需要确保源数据的坐标系统信息是正确的,并且选择正确的坐标转换参数。
此外,不同的GIS软件可能在操作细节和界面设计上略有差异,具体操作请根据实际软件进行。
方法二:使用数学公式进行转换除了使用GIS软件外,我们还可以使用数学公式进行坐标转换。
这种方法通常适用于对单个坐标点进行转换的场景。
以坐标平面为例,坐标平面是按照一定的投影算法将地球的表面展开成一个平面,进行坐标计算。
对于西安坐标系,其投影算法是高斯投影。
高斯投影可以将地理坐标(经纬度)转换为平面坐标(东北坐标)。
具体的转换过程如下:1.根据已知经度、纬度,将其转化为弧度制。
假设经度为λ,纬度为φ,则经纬度的弧度表示为λ'、φ',计算公式如下:λ'=λ*π/180φ'=φ*π/1802.根据经纬度的弧度表示,计算投影坐标。
在西安坐标系中,投影中央经线对应的经度为111°,则将经度λ'减去111°,得到经差L,计算公式如下:L=λ'-(λc'-111°)其中,(λc'-111°)是中央经线的经度,一般为105°。