机器人TCP详解
- 格式:docx
- 大小:812.61 KB
- 文档页数:9
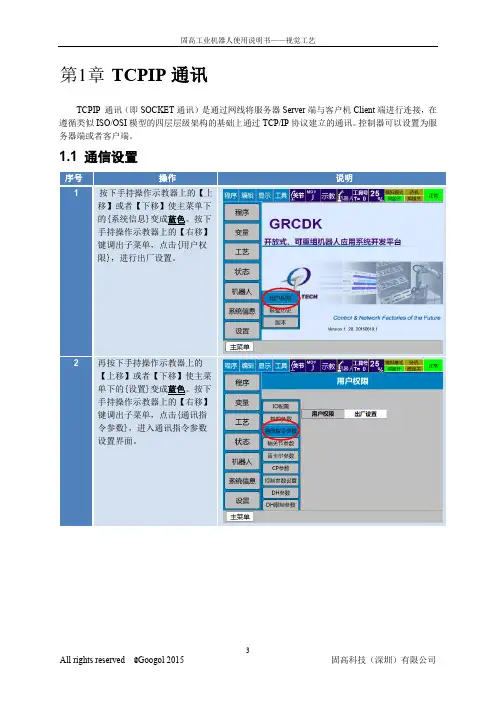
TCPIP通讯TCPIP 通讯(即SOCKET通讯)是通过网线将服务器Server端与客户机Client端进行连接,在遵循类似ISO/OSI模型的四层层级架构的基础上通过TCP/IP协议建立的通讯。
控制器可以设置为服务器端或者客户端。
1.1 通信设置按下手持操作示教器上的【上移】或者【下移】使主菜单下。
按下手持操作示教器上的【右移】【上移】或者【下移】使主菜。
按下手持操作示教器上的【右移】的通讯功能可以同时开通,你可以点击通路选择下面的向左或者向右按每次改变或者设置新的通路选择参才出按服务器地址:即服务器端的IP地址,当机器人控制器作为客户端时,则需要填入服务器IP地址;当机器人控制器作为服务器端,则可以不填该参数。
端口:服务器端口又是本地端口号,前者是对于控制器作为客户端而言,后者是对于控制器作为服务器端而言。
这里要求服务器和客户端的这个参数必须相同。
结束符:参数默认就是CLRF,回车换行符。
是从控制器发送出的数据带回车换行符。
超时时间:Socket 通讯时非阻塞模式下的延迟时间,对于接收指令SOCKRECV,控制器会在这段时间内不停扫描设备端是否有数据发送过来,如果有则马上接收,如果超出这段时间仍然没有数据发送至控制器,则示教程序会自动执行SOCKRECV的下一条指令。
通路名:参数是给Socket取的名字,相当于控制器端Socket的ID。
1.2指令说明1.2.1打开通讯SOCKOPEN Str1 Type= CLIENTStr1:表示此次打开的Socket的名字,需要和界面设置的【通路名】赋值一样。
所以在使用该指令时要先进入主界面里的【变量】-【数值变量】设置里面使得字符型变量S001的值为【通路名】的值。
例如,在上图设置了【#301】的【通路名】为‘robot’,那么在S001中的值应该为’robot’。
STR1对应的是S001,STR2对应的是S002,以此类推,如果用户在S002里面写入了Socket名字,那么参数STR1改为STR2。
ABB机器人示教器TCP坐标的设定
想了解ABB机器人示教器TCP坐标设定的友友可以查看此篇,详细的教程和注意事项想必会给你一些帮助
•ABB机器人,示教器
1. 1.TCP(Tool Center Point)工具座标系是机器人运动的基准。
2. 2.机器人的工具坐标系是由工具中心点TCP与坐标方位组成,机器人连
动时,TCP是必需的。
3. 3.当机器人夹具被更换,重新定义TCP后,可以不更改程序,直接运行。
但是当安装新夹具后就必需要重新定义这个坐标系了。
否则会影响机器人的稳定运行。
4. 4.系统自带的TCP坐标原点在第六轴的法栏盘中心,垂直方向为Z轴,
符合右手法则。
注意:在设置TCP座标的时候一定要把机器人的操作模式调到“手动限速模式”
5.TCP(Tool Center Point)工具座标系的设定步骤
END
注意事项
•如何在示教器上选择设定好的TCP坐标:1.在操纵窗口上,将光标下移到“tool”选项上,然后按回车进入选择界面。
2.在该界面上可以看见刚才设定的工件坐标,选择它按回车确定。
•注意:在设置TCP座标的时候一定要把机器人的操作模式调到“手动限速模式”。
上位机通过TCP通讯给ABB机器人发送文件的方法一、背景介绍在工业自动化生产中,ABB机器人作为自动化生产线上的重要一员,往往需要与上位机进行数据交换,其中文件传输是一种常见的数据交换方式。
TCP/IP是一种可靠的网络通讯协议,采用TCP/IP协议进行文件传输可以保证数据的安全和稳定。
二、上位机通过TCP通讯给ABB机器人发送文件的基本原理1.建立TCP连接在进行文件传输之前,首先需要建立TCP连接。
上位机作为客户端,ABB机器人作为服务器端,客户端与服务器端之间需要通过三次握手建立TCP连接。
2.发送文件数据建立了TCP连接之后,客户端可以向服务器端发送文件数据。
上位机需要将文件数据按照TCP协议进行分段封装,并通过TCP连接发送给ABB机器人。
3.文件接收与保存ABB机器人服务器端接收到文件数据后,需要进行数据解析并保存文件。
通过解析TCP数据包中的文件数据,服务器端可以将文件数据组装成完整的文件,并保存在指定的路径下。
三、上位机通过TCP通讯给ABB机器人发送文件的具体步骤1.建立TCP连接```1.1 在上位机上开启TCP通讯功能,设置ABB机器人的IP位置区域和端口号。
1.2 使用Socket套接字建立TCP连接。
1.3 发送连接请求,并进行三次握手建立TCP连接。
```2.发送文件数据```2.1 读取需要发送的文件数据。
2.2 将文件数据按照TCP协议进行分段封装。
2.3 通过建立的TCP连接,向ABB机器人发送文件数据。
```3.文件接收与保存```3.1 ABB机器人服务器端接收文件数据,并进行数据解析。
3.2 将TCP数据包中的文件数据组装成完整的文件。
3.3 将文件保存在指定的路径下。
```四、上位机通过TCP通讯给ABB机器人发送文件的注意事项1.文件传输安全在进行文件传输时,需要保证传输的文件数据的安全性。
可以采用加密传输的方式,保护文件数据的隐私和完整性。
2.文件传输稳定性在进行文件传输时,需要保证传输的文件数据的稳定性。

四轴机器人TCP 较正方法及拓展一、 准备工具在法兰面中心位置安装一个针尖,如下图要求针尖相对法兰面中心点的位置确定。
二、 使用直接输入法设置一个TCP先把机器人的第四轴旋转至0度,然后安装针尖。
此时TCP 的坐标如下。
根据针尖相对法兰中心点的位置输入TCP 点的大概位置。
并激活该TCP 。
三、 较正TCP 点在机器人的水平面位置摆放较正网格(CAD 打印)。
网络间距可根据校正的精度确定,一般为0.5MM 。
,如下图。
较正过程:1、把机器人第四轴调整到0度状态。
2、机器人切换到TOOL 坐标系,调整较正图,使网络与TOOL 坐标的X 、Y 方向平行,同时Z 方向应垂直于网格。
Y Z3、手动机器人使法兰针尖到网络图上任意一点。
如下图中红色圆位置。
4、编写以下程序L P[1] 1000mm/s fineL P[1] 1000mm/s fine tool offset PR[1]L P[1] 1000mm/s fine tool offset PR[2]pauseL P[1] 1000mm/s fine tool offset PR[1]L P[1] 1000mm/s fine其中PR[1] X=0;Y=0;Z=0;W=0;P=0;R=90PR[1] X=0;Y=0;Z=0;W=0;P=0;R=1804、运行以上程序P1点经180度旋转后到达P2点,如下图蓝色圆位置。
此时实际TCP位置为P1、P2点的中心线,如下图。
红色为P1点的TCP坐标方向,蓝色为P2点的TCP坐标方向。
根据下图可得偏移X=12X0.5/2=3mm;Y=8X0.5/2=2mm5、根据TCP要移动的方向修改TCP值,下图中,TCP设定中X增加3mm,Y增加2mm6、TCP修正后,重新teach up P1点后运行第4步来检验TCP准确度,如针尖位置不变,则TCP修正完成。
P[2]XYYXP[1]四、六轴机器人TCP较正拓展机器人TCP先用三点法或六点法设定。
机器人tcp自动校准算法概述说明以及解释1. 引言1.1 概述机器人是在现代社会中广泛应用的一种自动化设备,它们可以执行复杂的任务和操作。
机器人的TCP(Tool Center Point)是指机器人末端执行器或工具所在的点,它对于机器人的精确控制和准确性至关重要。
然而,在实际应用中,由于多种因素的影响,如装配误差、姿态变化等,导致了机器人TCP位置不够精确和稳定。
因此,为了获得更高的运动精度和重复定位精度,需要进行机器人TCP的自动校准。
本文将介绍一种机器人TCP自动校准算法及其原理与方法,并通过实验设计和结果分析来验证该算法的有效性。
1.2 文章结构本文共包括五个部分。
第一部分为引言,在此部分将对文章进行概述说明以及目录展示;第二部分将介绍机器人TCP自动校准算法背景知识,包括TCP及其重要性解释、校准需求说明以及相关研究现状介绍;第三部分将详细介绍机器人TCP自动校准算法原理与方法,包括基本原理说明、算法设计思路解析以及校准方法实施步骤详解;第四部分将进行实验设计与结果分析,包括实验环境介绍和参数设置说明、校准算法实验流程描述及数据收集方法分析以及结果数据展示与讨论分析;最后一部分为结论与展望,对研究工作进行总结回顾、创新点与局限性分析反思,并提出后续研究方向建议及未来发展前景展望。
1.3 目的本文的目的是介绍一种机器人TCP自动校准算法。
通过该算法的应用,期望能够提高机器人的运动精度和重复定位精度,从而满足现代工业生产中对于高精度操作的需求。
通过实验验证,进一步探索该算法在不同环境下的适应性和有效性,并为后续相关研究提供参考和指导。
2. 机器人TCP自动校准算法的背景知识:2.1 机器人TCP和其重要性解释机器人的末端执行器被称为工具中心点(Tool Center Point,简称TCP),它位于机器人手臂的末尾,并用于执行各种任务。
TCP的位置和姿态对于机器人执行任务的准确性至关重要。
tcp四点法标定
工具数据tooldata是ABB机器人关键程序数据之一,定义工具数据tooldata的常用方法为4点法和6点法(4点法加X轴和Z轴方向),下面以4点法为例进行工具定义的说明:
1、点击开始菜单,选择手动操纵。
2、点击工具坐标,进入工具坐标创建画面。
3、点击新建,默认设置,确定。
4、点击编辑,选择定义。
5、选择TCP(默认方向),点数为4点法。
6、调整机器人的姿态,使工具尖端无限接近圆锥体尖端(不能撞击),需要调整4个姿态,4个姿态差异越大平均误差越小,其中第4个点需要工具垂直于圆锥体尖端,方便定TCP的方向。
7、4个点修改位置完成后点击确定,出现平均误差界面,平均误差越小越好,最好小于0.5。
在此界面单击确定。
工具坐标4点定义完,还要在编辑-更改值里面修改质量MASS,改为1,重心改为(0,0,1)。
以上是tcp四点法标定。
目录版权声明 (1)声明 (1)联系我们 (1)第1章TCPIP通讯 (3)1.1通信设置 (3)1.2指令说明 (5)1.2.1打开通讯 (5)1.2.2关闭通讯 (5)1.2.3接收数据 (5)1.2.4发送数据 (6)1.3示教程序 (6)第2章RS232串口通信 (7)2.1通信设置 (7)2.2指令说明 (9)2.2.1 打开串口端口 (9)2.2.2 关闭串口端口 (9)2.2.3接收数据 (9)2.2.4发送数据 (9)2.3示教程序 (10)第3章字符串处理指令 (13)3.1指令说明 (13)3.1.1 整型转字符串 (13)3.1.2 位置型转字符串 (13)3.1.3 实数型转字符串 (13)3.1.4 字符串转整型 (13)3.1.5 字符串转位置点 (13)3.1.6 字符串转实数 (13)3.1.7 字符串连接 (14)3.1.8 字符串拆分 (14)3.1.9 字符串比较 (14)3.1.10 计算字符串长度 (14)3.1.11 字符串取左 (14)3.1.12 字符串取右 (14)3.1.13 取字符串中间的部分字符 (14)TCPIP通讯TCPIP 通讯(即SOCKET通讯)是通过网线将服务器Server端与客户机Client端进行连接,在遵循类似ISO/OSI模型的四层层级架构的基础上通过TCP/IP协议建立的通讯。
控制器可以设置为服务器端或者客户端。
1.1 通信设置按下手持操作示教器上的【上移】或者【下移】使主菜单下。
按下手持操作示教器上的【右移】【上移】或者【下移】使主菜。
按下手持操作示教器上的【右移】的通讯功能可以同时开通,你可以点击通路选择下面的向左或者向右按每次改变或者设置新的通路选择参才出按服务器地址:即服务器端的IP地址,当机器人控制器作为客户端时,则需要填入服务器IP地址;当机器人控制器作为服务器端,则可以不填该参数。
端口:服务器端口又是本地端口号,前者是对于控制器作为客户端而言,后者是对于控制器作为服务器端而言。
ER系列工业机器人ModbusTCP调试手册(RCS2 V1.5)修订记录目录前言 (3)第1 章功能简介 (4)第2 章ModBusTcp协议介绍 (4)2.1 ModBusTCP协议报文 (4)2.2 ModBusTCP协议功能码 (5)2.3 ER系列机器人ModBusTCP接口定义 (5)第3 章ModBusTCP点表 (7)第4 章接口调试 (12)4.1 ModScan调试助手 (12)4.2虚拟数字量交互示例 (14)4.3虚拟模拟量交互示例 (16)4.4远程启动机器人程序 (17)4.5远程加载机器人程序 (18)4.6远程复位程序指针 (20)4.7调试注意事项 (21)前言概述本手册适用于控制系统RCS2 V1.5,描述埃斯顿二代控制器ModBusTcp协议接口功能介绍。
读者对象本手册仅供受过培训,熟悉各种适用国家标准的“控制、自动化和驱动工程”领域专业人员。
●系统生产商:对自动化系统功能设计的技术人员。
●系统集成商:指自动化设备集成的技术人员。
注意事项●在安装和调试这些组件时,操作人员必须严格遵循本文档的说明和解释。
●相关负责人员必须确保所述产品的应用或使用满足所有安全要求,包括相关法律、法规、准则和标准。
●尽管本文档经过精心编制,但由于其中所描述的产品仍处于不断更新换代中,我们可能不会在每次更新后都检查文档中所描述的产品性能数据、标准或其它特性总是与实际产品相一致。
●本文档中难免会出现一些技术或者编辑错误,我们保留随时对文档信息做出修改之权力,恕不另行通知。
对于已经变更的产品,如果本文档中的数据、图表以及文字描述没有修改,我们将不再特别加以声明。
●任何人不得对软、硬件配置进行文本档中规定之外的修改,ESTUN公司对因此而造成的一切后果不承担任何责任。
●本文档中出现图示单位在没有特别标注说明时,默认单位为毫米mm。
安全说明第 1 章功能简介ModBusTcp协议接口是指外部逻辑控制器(PLC等)通过标准工业总线协议(ModBusTCP)与机器人通讯,读写机器人的虚拟IO端口的一种通讯方式。
机器人TCP计算及导出不同品牌机器人,TCP计算原理是不同的。
基本原理如下:Fanuc机器人:TCP是机器人的T oolframe在以自身为起点,绕自身平移、旋转所得。
KUKA机器人:TCP的X、Y、Z值是在机器人Toolframe下平移所得,A、B、C值是机器人Toolframe绕Baseframe旋转所得。
导出机器人TCP的方法可以根据不同品牌机器人的特点使用不同方法。
方法一:比较常规的,利用机器人控制器中设置TCP的功能得到。
具体操作如下:第一步:右击机器人打开RobotProperties对话框,在Controller选项卡中选择相应的控制器。
第二步:单击RobotSetup命令。
第三步:单击Tool&Base Setup命令。
第四步:选择工具编号、设置对应的TCP,每完成一个工具,单击一次Apply以保存设置。
方法二:利用Fanuc机器人计算原理上的便捷性,可以用更加简便的方法得到其TCP值。
(此方法仅适用于Fanuc机器人)第一步:将Working Frame设置在机器人ToolFrame上。
方法:使用命令LayloutàSetWorking Frame。
选取TOOLFRAME。
OK。
后,结果如下:第二步:利用软件的一些可以显示某个Frame六个值的功能把TCP值导出来。
介绍两种方法:方法一:利用mount tool时选择mount frame的功能。
第一步:右击机器人,选择mounttool命令。
第二步:在Mount Tool对话框中单击Create Frame of Reference命令,然后选择TCP。
此时出现的六个值即机器人TCP。
方法二:第一步:使用layoutàCreateFrameàFrameby 6 values命令。
第二步:将参照坐标系改为Working Frame(默认是World)。
第三步:选择TCP。
此时的六个值即TCP。
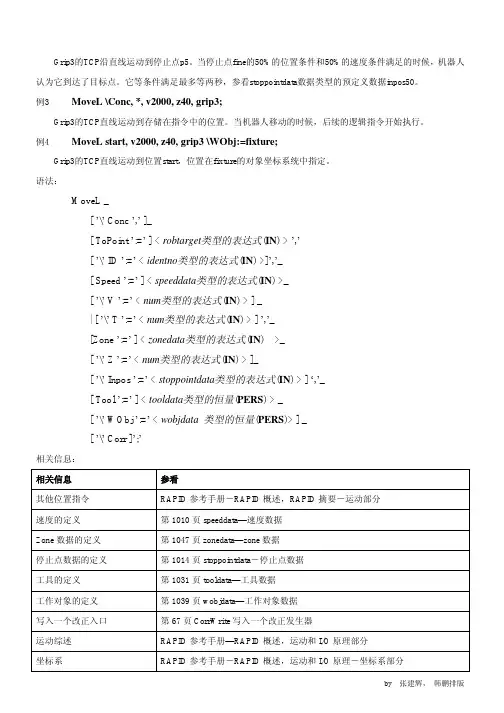
ABB常用指令详解1、ABB常用指令详解在ABB编程中,常用指令是必须掌握的内容。
本文将详细介绍ABB常用指令,并提供示例代码和相关说明,以帮助读者更好地理解和应用这些指令。
1.1 移动指令1.1.1 PTP(Point-to-Point)指令PTP指令用于使从当前位置直接移动到指定的目标位置。
该指令可在关节坐标系和工具坐标系下使用。
以下是一个示例代码:PTP P1, v100, z50, TCP1解释:- PTP:移动指令的类型。
- P1:目标位置的类型,可以是关节坐标或工具坐标。
- v100:移动速度,100表示100%的速度。
- z50:运动轴向的位置,50表示50mm。
- TCP1:工具坐标系,默认值为TCP1.1.1.2 LIN(Linear)指令LIN指令用于使沿直线轨迹从当前位置移动到指定的目标位置。
以下是一个示例代码:LIN P2, v200, z100, TCP2解释:- LIN:移动指令的类型。
- P2:目标位置的类型,可以是关节坐标或工具坐标。
- v200:移动速度,200表示200%的速度。
- z100:运动轴向的位置,100表示100mm。
- TCP2:工具坐标系。
1.2 程序控制指令1.2.1 IF-ELSE指令IF-ELSE指令用于根据条件执行不同的操作。
以下是一个示例代码:IF cond1 THENPTP P3, v150, z200, TCP3ELSEPTP P4, v100, z150, TCP4ENDIF解释:- IF cond1 THEN:如果条件cond1满足,则执行下一行的操作。
- PTP P3, v150, z200, TCP3:目标位置的移动指令。
- ELSE:如果条件cond1不满足,则执行下一行的操作。
- PTP P4, v100, z150, TCP4:另一个目标位置的移动指令。
- ENDIF:指示IF-ELSE语句块的结束。
1.2.2 WHILE指令WHILE指令用于循环执行一段代码,直到指定条件不满足为止。
这里使用的机器人是EPSON T3系列的一款Scara机器人。
机器人的编程软件使用的是EPSON RC++ V7.4.5版本,如果大家需要该软件,可以通过公众号回复304。
首先需要建立与机器人之间的连接,一般与机器人之间连接有两种方式,一种是USB串口,一个是以太网口,这里采用的是以太网接口。
SPEL+命令EPSON机器人编程使用的是SPEL+语言,需要参考SPEL+的相关命令进行编程。
这里罗列几个EPSON以太网编程的关键命令。
1、SetNet命令参数列表:通信端口编号:指定要设置参数的TCP/IP 的端口编号。
范围为201~216。
主机地址:指定主机的IP 地址。
TCP/IP 端口编号:指定TCP/IP 端口编号。
终止符:指定CR、LF、CRLF 中某个行末字符。
流控制:是指软件流控制,默认为NONE。
超时时间:以秒指定收发的最长时间。
指定0时,超时则变为无限。
通信协议:指定通信的协议(TCP/UDP)类型。
使用示例:SetNet #201, "192.168.0.1", 2001, CRLF, NONE, 02、OpenNet命令格式:OpenNet #端口编号As Client/Server参数列表:端口编号:指定要打开的TCP/IP 端口编号的整数值。
端口编号的范围为201~216。
使用示例:Function tcpipString data$OpenNet #201 As ClientWaitNet #201Input #201, data$Print "received '", data$, "' from host 1"Fend3、ChkNet命令格式:ChkNet (通信端口编号)参数列表:通信端口编号:指定TCP/IP 端口编号(201~216)。
返回值返回接收字符数(整数值)。
如果不存在接收数据,以下负值返回端口状态。