饿狼追兔建模
- 格式:pdf
- 大小:272.44 KB
- 文档页数:5
这期大家的绘画水平明显大有提高!萌总说了~~我们的绘画事业后继有人啦!鼓掌!撒花!
涂鸦板
广西 赵师程河北 贾康北京 张岩
陕西 王雄杰
广西 王家礼
河北 李迎军
对于当了裤子给坨坨买鸡腿的赵同学……嗯,我表示吃鸡腿很有压力,从今以后,为了减肥,只吃素食。
这个鸣人画得太热血了,而且螺旋丸不是搓出来的吗?
这幅画画得真心细致,不过人
物的比例(如手臂等部位)有所欠
缺,但是脸型是真心好看啊。
线条这么粗,你这不是涂鸦,
是剪纸吗?
悟空,你的尾巴肿么了?炸毛
拉?
“红果果”(赤裸裸)地造谣
啊,亲,红狼明显是倒在了坨坨狼
的脚下啊!
Copyright©博看网 . All Rights Reserved.
076。
饿狼追兔问题数学建模数学建模饿狼追兔问题摘要本文研究饿狼追兔问题,是在给定狼兔相对位置,以及兔子巢穴位置的情况下求解的,狼的速度是兔子速度两倍,在不考虑其他任何因素的情况下研究狼能否追上兔子的问题。
首先,我们对问题进行了适当的分析,然后根据已知条件建立了狼的运动轨迹微分模型。
其次,根据建好的模型,运用MATLAB编程,然后仿真画出了饿狼和野兔的运动轨迹图。
再次,用解析方法将建立的模型求解,并给出该问题的结论,准确的回答题目。
最后,用数值方法求解,将所求与前面所求进行对比,也给出结论,回答题目。
并将两种方法做相应比较。
结论:野兔可以安全回巢关键词:算法高阶常微分方程§1.1问题的提出在自然界中,各种生物都有它的生活规律,它们钩心斗角,各项神通,在饿狼追野兔的工程中,饿狼的速度是野兔的二倍,但是野兔有自己的洞穴,野兔在跑到自己洞穴之前被狼捉住,野兔就将会成为饿狼的囊中之物;如果野兔在饿狼捉住自己之前跑回到自己的洞穴,那么野兔就保住小命,得以生还。
图1-1-1为饿狼追野兔的两条曲线,其中绿线表示野兔,图中的箭头表示的是野兔的奔跑方向,野兔从远点开始沿y轴正方向运动,其洞穴在坐标为(0,60)的位置;红线为饿狼的运动轨迹,,图中的剪头表示饿狼追逐野兔的方向,饿狼从坐标为(100,0)的方向追逐野兔,饿狼的速度是野兔速度的二倍。
建立数学模型需研究一下几个问题:(1)设野兔的速度我v0,饿狼的速度为v1,野兔的奔跑方向是沿y轴正方向奔跑,而饿狼的方向是一直指向野兔的方向,即饿狼的运动的轨迹某一时候的切线指向同一时刻的野兔的位置。
建立饿狼追野兔的运动轨迹微分模型。
(2)根据建立的饿狼运动轨迹得微分模型,作出饿狼与野兔的运动轨迹图形。
(3)用解析方法求解,即根据第二步作出的饿狼渔业突地运动轨迹图形,分析兔子能否安全回到巢穴,即野兔的运动曲线与饿狼的运动曲线的交点是在点(0,60)-野兔巢穴的上面还是下面。
数学建模试题一、传染病模型医学科学的发展已经能够有效地预防和控制许多传染病,但是仍然有一些传染病暴发或流行,危害人们的健康和生命。
社会、经济、文化、风俗习惯等因素都会影响传染病的传播,而最直接的因素是:传染者的数量及其在人群中的分布、被传染者的数量、传播形式、传播能力、免疫能力等。
一般把传染病流行范围内的人群分成三类:S类,易感者(Susceptible),指未得病者,但缺乏免疫能力,与感染者接触后容易受到感染;I类,感病者(Infective),指染上传染病的人,它可以传播给S类成员;R类,移出者(Removal),指被隔离或因病愈而具有免疫力的人。
要求:请建立传染病模型,并分析被传染的人数与哪些因素有关?如何预报传染病高潮的到来?为什么同一地区一种传染病每次流行时,被传染的人数大致不变?二、线性规划模型—销售计划问题某商店拟制定某种商品7—12月的进货、售货计划,已知商店仓库最大容量为1500件,6月底已存货300件,年底的库存以不少于300件为宜,以后每月初进货一次,假设各月份该商品买进、售出单价如下表。
要求:若每件每月的库存费用为0.5元,问各月进货、售货各为多少件,才能使净收益最多?建立数学模型,并用软件求解。
【注】线性规划在MATLAB的库函数为:linprog。
语法为:x = linprog(f,A,b)x = linprog(f,A,b,Aeq,beq,lb,ub,x0,options)[x,fval,exitflag,output,lambda] = linprog(...)例如:线性规划目标函数的系数:f = [-5; -4; -6]约束方程的系数及右端项:A = [1 -1 13 2 43 2 0];b = [20; 42; 30];lb = zeros(3,1);调用线性规划程序linprog求解,得:[x,fval,exitflag,output,lambda] = linprog(f,A,b,[],[],lb);x= 0.000015.00003.0000三、一阶常微分方程模型—人口模型与预测 下表列出了中国1982-1998年的人口统计数据,取1982年为起始年(0=t ),1016540=N 万人,200000=m N 万人。
第三章 微分方程建模在许多实际问题的研究中,要直接导出变量之间的函数关系较为困难,但要导出包含未知函数的导数或微分的关系式却较为容易,此时即可用建立微分方程模型的方法来研究实际问题。
例如,根据自由落体运动的重力加速度g 为常数及初始条件即可得出自由落体运动的公式、根据单摆的受力分析及牛顿第二定理即可得到单摆运动满足的方程等等就是典型的实例。
本章除了介绍一些来自经典力学的物理及一些几何方面的微分方程问题以外,也介绍了一些稍有不同的微分方程应用题。
这些模型研究的主要是来自于非物理领域的实际问题,对这些问题,我们将分析其特征,根据具体情况进行类比,提出假设条件并建立微分方程模型加以研究。
提出的假设条件不同,将会导出不同的微分方程。
最后还要将求解的结果与实际现象进行对比,如果差异较大还应反复修改假设建立新的模型。
因此,在这类模型中,微分方程被当成了研究问题的工具。
事实上,在连续变量问题的研究中,微分方程或微分方程组还是十分常用的数学工具之一。
§3.1 几个简单实例例3.1 (理想单摆运动的周期)本例的目的是建立理想单摆运动满足的微分方程,由该微分方程即可得出理想单摆运动的周期公式。
(图3-1)从图3-1中不难看出,小球所受的合力为 sin mg ,根据牛顿第二定律可得:θθsin mg ml -= 从而得出两阶微分方程:sin 0(0)0,(0)g l θθθθθ⎧+=⎪⎨⎪==⎩ (3.1) 这就是理想单摆运动满足的微分方程。
(3.1)是一个两阶非线性常微分方程,不容易求解。
根据微积分知识,当θ很小时,有sin θ≈θ,此时,为简单起见,我们可考察(3.1)的近似线性方程:⎪⎩⎪⎨⎧===+∙∙∙0)0(,0)0(0ϑϑϑϑϑl g (3.2)(3.2)的特征方程为02=+lg λ 对应的特征根为i lg =λ,(其中i 为虚单位),故(3.2)中的微分方程的通解为: t c t c t ωωϑcos sin )(21+=,其中lg =ω 代入初始条件,即可求得满足初始条件的微分方程问题(3.2)的解θ(t )= θ0cos ωt注意到当4T t =时,θ(t ) = 0,即可得出 24πω==T l g t 故有 l g T π2=这就是中学物理中理想单摆运动周期的近似公式。

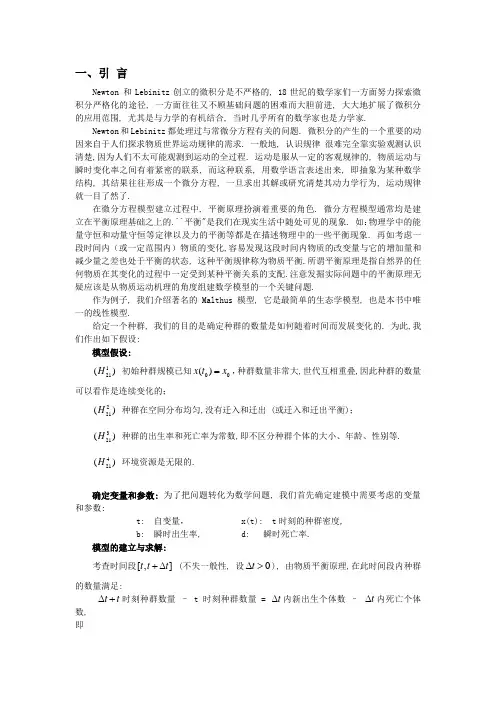
一、引 言Newton 和Lebinitz 创立的微积分是不严格的, 18世纪的数学家们一方面努力探索微积分严格化的途径, 一方面往往又不顾基础问题的困难而大胆前进, 大大地扩展了微积分的应用范围, 尤其是与力学的有机结合, 当时几乎所有的数学家也是力学家.Newton 和Lebinitz 都处理过与常微分方程有关的问题. 微积分的产生的一个重要的动因来自于人们探求物质世界运动规律的需求. 一般地, 认识规律 很难完全靠实验观测认识清楚,因为人们不太可能观测到运动的全过程. 运动是服从一定的客观规律的, 物质运动与瞬时变化率之间有着紧密的联系, 而这种联系, 用数学语言表述出来, 即抽象为某种数学结构, 其结果往往形成一个微分方程, 一旦求出其解或研究清楚其动力学行为, 运动规律就一目了然了.在微分方程模型建立过程中, 平衡原理扮演着重要的角色. 微分方程模型通常均是建立在平衡原理基础之上的.``平衡"是我们在现实生活中随处可见的现象. 如:物理学中的能量守恒和动量守恒等定律以及力的平衡等都是在描述物理中的一些平衡现象. 再如考虑一段时间内(或一定范围内)物质的变化,容易发现这段时间内物质的改变量与它的增加量和减少量之差也处于平衡的状态, 这种平衡规律称为物质平衡.所谓平衡原理是指自然界的任何物质在其变化的过程中一定受到某种平衡关系的支配.注意发掘实际问题中的平衡原理无疑应该是从物质运动机理的角度组建数学模型的一个关键问题.作为例子, 我们介绍著名的Malthus 模型, 它是最简单的生态学模型, 也是本书中唯一的线性模型.给定一个种群, 我们的目的是确定种群的数量是如何随着时间而发展变化的. 为此,我们作出如下假设:模型假设:121()H 初始种群规模已知00()x t x =,种群数量非常大,世代互相重叠,因此种群的数量可以看作是连续变化的;221()H 种群在空间分布均匀,没有迁入和迁出 (或迁入和迁出平衡);321()H 种群的出生率和死亡率为常数,即不区分种群个体的大小、年龄、性别等. 421()H 环境资源是无限的.确定变量和参数: 为了把问题转化为数学问题, 我们首先确定建模中需要考虑的变量和参数:t: 自变量, x(t): t 时刻的种群密度,b: 瞬时出生率, d: 瞬时死亡率.模型的建立与求解:考查时间段[,]t t t +∆ (不失一般性, 设0t ∆>), 由物质平衡原理,在此时间段内种群的数量满足:t t ∆+时刻种群数量 – t 时刻种群数量 = t ∆内新出生个体数 – t ∆内死亡个体数,即()()()(),x t t x t bx t t dx t t +∆-=∆-∆亦即()()()(),x t t x t b d x t t +∆-=-∆ 令0t ∆→,可得()()():()dx t b d x t rx t dt=-= 满足初始条件0(0)N N =的解为()00().b d t rt x t x ex e -== 于是有0r >,即 b d >,则有 lim (),t x t →∞=+∞ 0r =,即 b d =,则有 0lim (),t x t N →∞= 0r <,即 b d <,则有 lim ()0.t x t →∞= Malthus 模型的积分曲线 ()x t 呈“J ”字型, 因而种群的指数增长又称为“J ”型增长.二、常微分方程发展简史常微分方程是伴随着微积分发展起来的, 微积分是它的母体, 生产生活实践是它生命的源泉. 300年来,常微分方程诞生于数学与自然科学(物理学、力学等)进行崭新结合的16、17世纪,成长于生产实践和数学的发展进程,表现出强大的生命力和活力,蕴含着丰富的数学思想方法。
单身狗快闪丨疯狂动物城秀恩爱大赛欣赏版权声明无需授权即可转载,但需保留以上版权声明上周末,《疯狂动物城》会员绘画活动大神交流专场在原画人接待群举行(群号:205622329)。
原画人邀请了 @傀儡君的黄晓晓 @彭钥两位老师,对参与活动的作品做了详尽的点评。
老师介绍尸体傀儡 Ice Puppet,日本LOC签约2年画师,西安冰川动漫设计有限公司创始人,桥合动漫合作老师。
曾参与项目:龙之传奇、黄帝。
彭钥,原画概念设计师,四川美术学院设计专业,曾就职于广州网易公司,任职原画概念设计师,现彭钥CG艺术工作室创始人。
曾参与项目:天下三、剑噬大地、剑道独尊等。
作品点评下面是参与活动的部分作品更多作品大家可以加群观看点评一:轻松气氛的图饱和度过高。
不要以纯粹的明暗关系刻画,否则画面会比较沉闷。
点评二:1,左胸和右胸透视不完全对称,右胸大一点2,上半身再强壮一点,手臂增厚,胯加粗,弱化人物的形象,加强老虎的形象。
3,手在大腿上的投影,手可以适当作出像老虎方向的变形。
4,五官调整一下,现在有点太似人,可以参考运动员的表情。
5,粉色的场景环境给人以暧昧的联想。
点评三:1,构图中前、中、后景没有分开,黑色条状物可以压得更重,前景的暗部要比中景暗,中景细节可以再多刻画一些。
2,表情到位,眼睛不太像,头发和原著不是很一样,毛发处理可以有虚实关系一些,现在有些杂乱。
3,用笔太软,不够肯定。
4,闪电应该有亮暗关系,脚部的地方暗一些。
5,背景有点糊,闪电的右手臂可以和后景更分明一些。
6,身上的细节可以体现细节感,领带飘到了后面,衬衫也可以加上被风吹动的布褶皱。
7,左肩膀没有画出和右肩膀一样的大小点评四:1,色彩用的比较好,夜晚的氛围做的很好。
2,背景不要用ps直接给滤镜,自己画一画会更好。
3,刻画前方石头的细节。
4,裙子有一点生硬,可以按照腿的结构画。
5,毛发色彩可以更鲜艳一些,整理一下现实中的颜色,羊的颜色可以做的更萌一些。
2、{(修改——重置变换)就可以复制}附于新材质或{另外新建片面——与原平面90度垂直,附上暴力熊侧面贴图(步骤同上)}3、调整参考图位置与透明度——创建显示层——保存(不要用纯数字不要用中文)4、创建NURBS球体,把接缝线放在后面Y90.5、正交视图X光模式对上参考图片,正面侧面对齐参考图片6、调整侧视图中点NURBS球体控制定点,大概与参照图匹配7、加线做出嘴部(正交视图)曲面模块下——编辑曲面——插入等参线)8、对应前视图与侧视图调整9、新建NURBS球体(把接缝线放在后面Y180)10、加等参线删掉上部分(曲面模块下——编辑曲面——切割曲线)11、对应前视图与侧视图调整(G键隐藏)ctrl+h(隐藏选择的)alt+h(隐藏不被选择的)ctrl+shift+h(显示上次所选择的物体)shift+h(显示所隐藏的)12、创建NURBS圆柱体(把接缝线放在后面Y180)13、加等参线,调整摆放好位置14、同理建出腿部,镜像腿脚安装15、同时选中腿脚Ctrl+D复制X轴-116、检查布线,调整是布线均匀17、新建多边形盒子(尽量少的段数)——多边形模块——网格——平滑18、安装耳朵19、选中所有的NURBS多边形——修改——转化——NURBS到多边形(控制点方式)20、只显示曲线模式——删除曲面模型,只留下多边形模型21、调整面和布线——删除头部一半模型22、关闭双面灯光——检查下法线如果不对在法线里反向以下23、耳朵和脸部布尔——结合点(重要)选择相邻的点——编辑网格Edit Mesh——合并Merge(大阀值)2424、接缝处需要有一定硬度,所以我们调整加边25、(杜绝五边面)一律四边面,先加线再减线不要破坏外形26、微调Mesh——Sculipt CeometryTool雕刻几何工具松弛模式,配合M键轻点模型27、删除历史——复制——缩放:-128、镜像合并:选中两个半脑型——网格(合并)29、选中中间线点合并点(仔细,四视图观察不要多选点)(可以隐藏其他未选中模型)30、调整点31、调整脚(删除另一半的腿和手)32、编辑网格——切割面工具——切割腿根33、分离两部分删除不要的部分摆放腿部34、(确保完全结合)(合并多余点)35.手同上36、镜像结合37、清空历史38、简单材质机器人,准备工作(导入参照图)建模关键的是遵守一定的操作流程做角色外形转多边形调整细节面片(分段1);附无反光材质球(Lambert)——(颜色通道)贴图文件(机器人)6(如果图片清晰度低可以调低过滤度)2、{(修改——重置变换)就可以复制}附于新材质或{另外新建片面——与原平面和暴力熊侧面无手贴图(步骤同上)}3、调整参考图位置与透明度——创建显示层——保存(不要用纯数字不要用中文)4、创建NURBS圆柱,把接缝线放在后面Y90.通过变形工具架中的晶格(分段为5、清除历史确定晶格变形,正交视图X光模式对上参考图片,正面侧面对齐参考图片6、加两条等参线(曲面模块下——编辑曲面——插入等参线),调整头部大致外形。
追问题汇总Matlab实验课结题报告老师:王爱学学生:王安专业:电子信息工程学号: 3 1 0 0 7 1 8 2 0 32012-1-3追击问题汇总——专题研究摘要:两物体在同一直线或封闭图形上运动所涉及的追及、相遇问题,通常归为追及问题。
追及问题是运动学中较为综合且有实践意义的一类习题,它往往涉及两个以上物体的运动过程,每个物体的运动规律又不尽相同.对此类问题的求解,除了要透彻理解基本物理概念,熟练运用运动学公式外,还应仔细审题,挖掘题文中隐含着的重要条件,并尽可能地画出草图以帮助分析,确认两个物体运动的位移关系、时间关系和速度关系,在头脑中建立起一幅物体运动关系的图景.借助于v-t图象来分析和求解往往可使解题过程简捷明了.现在又学了matlab,可以借助计算机的强大功能来辅助我们的研究,使我们可以来深入研究实际中的问题。
关键词:追及问题、模型、matlab、化归、物理、lingo软件目的及意义:美籍华人杨振林教授在比较中西方教育之后有这样一段话:“中国传统的教育方法很大的一个缺点就是教育出来的学生一般比较胆小,动手能力差,但会应付考试。
而美国教育出来的学生胆子比较大,动手能力强,但不会考试。
”面对“知识爆炸”,如果培养出来的学生只会考试,而不会动手实践,这样的学生是不能在激烈竞争的信息社会里立于不败之地的。
或许正因为如此,才使我们的教育加快了改革的步伐,必须有效地改变以往以知识接受为主的学习方式,开发以学生作为主体参与的探究性学习方式,以全面推进素质教育,提出了研究性学习进课堂。
下面是我想到的一个课题。
从小学到大学追及问题都是个热门的问题。
小学的2人直线追及问题,到高中物理中 2人追及问题和多人追及,最后在大学学了微积分后的空间追及问题(导弹追击)。
而现在在学了matlab后,可以用这个最好的数学实验室来建立追及模型。
建立图形图象来直观的表示追及问题解法。
一、2个对象的追及问题课前知识补充1).追上与追不上的临界条件两物体(追与被追)的速度相等常是追上、追不上及两者距离有极值的临界条件.2).常见的两类追及形式(1)速度大者减速(如匀减速直线运动)追速度小者(如匀速运动)①两者速度相等时,若追者位移仍小于被追者位移与初始两者间距之和,则永远追不上,此时两者间距最小.②两者速度相等时,若追者位移恰等于被追者位移与初始两者间距之和,则刚好追上,也是两者避免碰撞的临界条件.③若相遇时追者速度仍大于被追者的速度,则被追者还能再一次与追者相遇,两者速度相等时,两者间距离有一个较大值.(2)速度小者加速(如初速度为零的匀加速直线运动)追速度大者(如匀速运动)①一定能追上,当两者速度相等时两者间有最大距离.②当追者位移等于被追者位移与初始两者间距之和时,后者追上前者即相遇.1、简单2人直线追及问题问题:小王、小李同时从学校去公园,小王每小时行1km,小李有事晚出发,为了能和小王同时到达,小李每小时用1.5km的速度前行,但小王先走了50公里时,结果在离公园门口处被小李追上,求学校到公园的距离?模型假设:①人在追及时不考虑外部因素的影响,即不影响其追及②每个人的保持速度一样,即匀速行走模型解答:设时间为t,小王的速度为v1,小李的速度为v2,小王的行走距离为x1,小李的行走举例为x2.解:x1=v1*t+50X2=v2*tMatlab建模2、复杂2人追及问题(饿狼追兔问题):题目:=10 m/s,B车A、B两列火车在同一轨道上同向行驶,A车在前,其速度vA在后,其速度v=30 m/s.因大雾能见度低,B车在距A车700 m时才发现前方B有A车,这时B车立即刹车,但要经过1 800 mB车才能停止.问A车若按原速度前进,两车是否会相撞?模型假设:①人在追及时不考虑外部因素的影响,即不影响其追及②A的保持速度一样,即匀速行驶,B为匀减速模型解答:设:设A速度为v1,B速度为v2,B的加速度为a,时间为t,A的行驶路程为x1,B的行驶路程为x2解:因为2as=v^2所以a=2*1800/v2^2=0.25(m/s^2)X1=v1*tX2=(v2-at)*t答:会撞上车Matlab 程序编写:v1=10; v2=30; t=0:0.1:80; x1=v1.*t;x2=(v2-0.25.*t/2).*t;y=x1-x2+700; plot(t,x1,t,x2,t,y);二、3人互追问题题目:在三角形ABC 的3个顶点各有一个人。
数学建模课程教学思考作者:彭勇,钟鑫来源:《教育教学论坛》2013年第15期摘要:数学建模是联系实际问题与数学的桥梁,伴随着科技的蓬勃发展,数学建模被广泛地应用于众多科学领域中,高等教育必须重视对学生数学建模素质的培养。
本文分析了数学建模课程教学面临的课程定位、教学对象知识结构、教材内容与课时协调等问题,提出数学建模课程教学应注重案例引导,合理取舍教学内容;注重启发教学,促进学生积极思维;注重合作学习,保证教学效果。
关键词:数学建模;教学;能力培养中图分类号:G642.4 文献标志码:A 文章编号:1674-9324(2013)15-0033-03数学模型就是对于一个实际问题按其内在规律,进行一些合理的、必要的假设,运用适当的数学工具得到的一个数学结构。
而通过数学的分析与计算,求解此数学结构使其所得结果能成功解决原实际问题的过程即为数学建模。
自数学建模教学进入大学课堂,经过20多年的发展,现在大多本科、专科院校开设了各种形式的数学建模课程和讲座,为培养学生利用数学方法分析、解决实际问题的能力开辟了一条有效的途径。
数学建模是联系实际问题与数学的桥梁,伴随着科技的蓬勃发展,数学建模被广泛地应用于自然科学、工程技术、医学、经济学等众多科学领域中,必须重视数学建模素质的培养。
一、数学建模课程教学面临的问题1.数学建模课程定位问题。
数学建模课程教学目的应是通过一些具体实例引入使学生掌握数学建模基本思想、基本方法,学会进行科学研究的一般过程,并能进入一个实际操作的状态。
通过数学模型有关的概念、特征的学习和数学模型应用实例的分析,培养学生数学推导计算和简化分析能力,培养学生联想、洞察能力、综合分析能力,培养学生应用所学过数学知识解决实际问题的能力。
因此,数学建模课程教学应定位在培养用所掌握的数学知识解决实际问题的能力,而不是掌握某种新的数学工具。
2.教学对象知识结构问题。
要做好数学建模课程的教学,必须考虑教学对象所掌握的数学知识结构问题。
COMSOL 使用技巧中仿科技公司CnTech Co.,Ltd目录一、1.11.21.31.41.51.6二、2.12.22.32.4三、3.13.23.33.43.5四、4.14.24.34.44.5五、5.15.25.3六、6.16.26.36.46.5七、几何建模................................................................................................................................. - 1 -组合体和装配体................................................................................................................. - 1 -隐藏部分几何..................................................................................................................... - 2 -工作面................................................................................................................................. - 3 -修整导入的几何结构......................................................................................................... - 4 -端盖面............................................................................................................................... - 11 -虚拟几何........................................................................................................................... - 12 -网格剖分............................................................................................................................... - 14 -交互式网格剖分............................................................................................................... - 14 -角细化............................................................................................................................... - 16 -自适应网格....................................................................................................................... - 16 -自动重新剖分网格........................................................................................................... - 18 -模型设定............................................................................................................................... - 19 -循序渐进地建模............................................................................................................... - 19 -开启物理符号................................................................................................................... - 19 -利用装配体....................................................................................................................... - 21 -调整方程形式................................................................................................................... - 22 -修改底层方程................................................................................................................... - 23 -求解器设定........................................................................................................................... - 25 -调整非线性求解器........................................................................................................... - 25 -确定瞬态求解的步长....................................................................................................... - 26 -停止条件........................................................................................................................... - 27 -边求解边绘图................................................................................................................... - 28 -绘制探针图....................................................................................................................... - 29 -弱约束的应用技巧............................................................................................................... - 31 -一个边界上多个约束....................................................................................................... - 31 -约束总量不变................................................................................................................... - 32 -自定义本构方程............................................................................................................... - 34 -后处理技巧........................................................................................................................... - 36 -组合图形........................................................................................................................... - 36 -显示内部结果................................................................................................................... - 37 -绘制变形图....................................................................................................................... - 38 -数据集组合....................................................................................................................... - 39 -导出数据........................................................................................................................... - 39 -函数使用技巧....................................................................................................................... - 43 -7.17.27.37.4八、8.18.2九、9.19.2十、10.110.210.310.4十一、11.111.211.311.411.511.6随机函数........................................................................................................................... - 43 -周期性函数....................................................................................................................... - 44 -高程函数........................................................................................................................... - 45 -内插函数........................................................................................................................... - 46 -耦合变量的使用技巧........................................................................................................... - 48 -积分耦合变量................................................................................................................... - 48 -拉伸耦合变量................................................................................................................... - 49 -ODE 的使用技巧................................................................................................................... - 50 -模拟不可逆形态变化....................................................................................................... - 50 -反向工程约束................................................................................................................... - 51 -MATLAB 实时链接................................................................................................................ - 52 -同时打开两种程序GUI................................................................................................. - 52 -在COMSOL 中使用MATLAB 脚本................................................................................ - 52 -在MATLAB 中编写GUI ................................................................................................. - 53 -常用脚本指令................................................................................................................ - 54 -其他................................................................................................................................... - 56 -局部坐标系.................................................................................................................... - 56 -应力集中问题................................................................................................................ - 56 -灵活应用案例库............................................................................................................ - 57 -经常看看在线帮助........................................................................................................ - 57 -临时文件........................................................................................................................ - 58 -物理场开发器................................................................................................................ - 59 -一、几何建模COMSOL Multiphysics 提供丰富的工具,供用户在图形化界面中构建自己的几何模型,例如1D 中通过点、线,2D 中可以通过点、线、矩形、圆/椭圆、贝塞尔曲线等,3D 中通过球/椭球、立方体、台、点、线等构建几何结构,另外,通过镜像、复制、移动、比例缩放等工具对几何对象进行高级操作,还可以通过布尔运算方式进行几何结构之间的切割、粘合等操作。
高阶常微分方程模型—饿狼追兔问题第一章摘要概述本文以狼追击兔子这一现实情况为背景,并合理的加以数学假设,着重实际与模型的结合,现有一只兔子和一匹狼,兔子位于狼的正西100米处,假设当狼发现兔子时,兔子同时也发现了狼,这时二者一起起跑,兔子往正北60米处的巢穴跑,狼朝同样的方向在追兔子。
已知兔子、狼是匀速跑且狼的速度是兔子的两倍。
建立狼的运动轨迹微分模型。
通过画出的兔子与狼的运动轨迹图形,用解析方法及数值方法求解,兔子能否安全回到巢穴?经过分析与求解,得知兔子无危险。
在自然科学和技术科学中往往遇到大量的微分方程问题。
通过对高阶微分方程的分析,我们对题目里提出的问题建立了符合实际的数学模型,在模型的求解过程中应用数学软件MATLAB等计算工具,编写相应的程序,解决实际问题。
论文最后对模型的优缺点进行了分析和评价,并提出了模型的改进方向和思路。
关键字微分方程饿狼追兔数学建模第二章模型的背景问题描述随着课改的深入开展,实际情景问题应运而生,并迅速发展成为命题的亮点、热点。
实际情景问题是复杂多变的,它贴近生活,为学生所熟悉,且以一定的知识为依托。
恶狼追兔的问题属于实际的情景问题,具有一定的时代气息。
数学模型一般是实际事物的一种数学简化。
它常常是以某种意义上接近实际事物的抽象形式存在的,但它和真实的事物有着本质的区别。
是研究现实世界数量关系和空间形式的科学,建立教学模型的过程,是把错综复杂的实际问题简化、抽象为合理的数学结构的过程。
有助于我们提高用数学理论和方法去分析和解决问题的全过程,提高我们分析问题和解决问题的能力,提高我们学习数学的兴趣和应用数学的意识与能力,使我们在今后的工作中能经常性地想到用数学去解决问题,提高我们尽量利用计算机软件及当代高新科技成果的意识,能将数学、计算机有机地结合起来去解决实际问题。
利用高阶常微分方程模型—饿狼追兔问题现有一只兔子、一匹狼,兔子位于狼的正西100米处,假设兔子与狼同时发现对方并一起起跑,兔子往正北60米处的巢穴跑,而狼在追兔子。
狼追兔子的问题1.1 摘要:数学建模可以使抽象的问题用数学符号和语言清楚的表达出来。
针对此题是高阶常微分方程问题。
此例问题虽然问法多样,但解法基本一致,这道题狼和兔子在运动过程中属微分方程模型与一阶常微分方程。
狼追兔子问题来源很久,早在几百年前就有人在研究他,由于数学的发展水平不是很高和软件的局限,所以没有研究透彻。
如今随着数学学科的发展和应用软件的飞速发展,对于这个的研究已进入新阶段。
由于狼要盯着兔子追,所以狼行走的是一条曲线,且在同一时刻,曲线上狼的位置与兔子的位置的连线为曲线上该点处的切线。
建立二者的运动微分方程,计算它们的运动轨迹,用软件MATLAB求解微分方程模型。
计算出兔子是否安全回到自己的巢穴。
1.1.1 问题的来源及意义:(一) 问题重述与分析: 现有一只兔子,一只狼,兔子位于狼的正西100米处。
假设兔子与狼同时发现对方并一起起跑,兔子往正北60米处的巢穴跑,而狼在追兔子,已知兔子、狼是匀速跑且狼的速度是兔子的两倍。
问题是兔子能否安全回到巢穴?(二)题起源于导弹跟踪问题,与狼追兔子问题在解决方法上是大致一样的。
导弹跟踪的研究对于再军事上有很重要的意义。
将导弹跟踪问题能简化为狼追兔子问题,都是高阶常微分方程模型,要涉及常微分方程,学会在实际问题中运用数学方法建模和求解。
1.1.2问题的分析:饿狼追兔问题一阶微分方程初值问题数值解。
兔子它的洞在距离它现在吃草处正北方的60米处,在兔子的正东面100米处有一头饿狼正潜伏着观察兔子多时了兔子发现了狼的存在.兔子拼命的沿直线向洞逃跑,兔子知道不赶快进洞命休已,狼和兔子同时启动并且死死盯着兔子扑去.兔子跑的虽然快,但狼的速度是兔子速度的2倍.假如兔子和狼都匀速运动. 为了研究狼是否能够追上兔子,可以先考虑求出狼追兔子形成的追击曲线,然后根据曲线来确定狼是否能够追上兔子。
1.1.3 模型假设:狼在追击过程中始终朝向兔子;狼追击兔子的轨迹看作是一条光滑的曲线,即将动点P ),(y x 的轨迹看作一条曲线,曲线方程表示为)(x y y =。