曲柄滑块机构
- 格式:doc
- 大小:190.50 KB
- 文档页数:7
曲柄滑块机构工作原理一、引言曲柄滑块机构是机械传动中常用的一种机构,它能将旋转运动转化为直线运动,广泛应用于各种机械设备中。
本文将详细介绍曲柄滑块机构的工作原理。
二、曲柄滑块机构的组成曲柄滑块机构由曲轴、连杆和滑块三部分组成。
1. 曲轴曲轴是一根直径不等的圆柱体,它通常由多个偏心圆组成。
在工作时,曲轴通过旋转带动连杆和滑块实现运动转换。
2. 连杆连杆是连接曲轴和滑块的零件,它通常由两个铰接连接的杆组成。
在工作时,连杆能够保持与曲轴相切,并使得滑块产生直线运动。
3. 滑块滑块是一个可在直线上自由运动的零件,它通过连杆与曲轴相连。
在工作时,当曲轴旋转时,连杆推动滑块沿着固定方向做直线运动。
三、曲柄滑块机构的工作原理曲柄滑块机构的工作原理可以分为四个阶段:进气、压缩、爆发和排气。
1. 进气阶段在进气阶段,曲轴处于上死点位置,连杆与滑块的夹角为180度。
此时,空气通过进气门进入汽缸内。
2. 压缩阶段在压缩阶段,曲轴开始向下旋转,连杆与滑块的夹角逐渐减小。
此时,活塞开始向上运动,将空气压缩。
3. 爆发阶段在爆发阶段,当曲轴旋转到一定角度时,连杆与滑块的夹角达到最小值。
此时,点火器点燃混合气体,在高温高压下爆炸产生能量。
4. 排气阶段在排气阶段,曲轴继续向下旋转,连杆与滑块的夹角逐渐增大。
此时,活塞开始向下运动,并将燃烧后的废气排出汽缸外。
四、结论通过以上介绍可以看出,在曲柄滑块机构中,曲轴通过旋转带动连杆和滑块实现运动转换。
在工作过程中,曲轴的旋转运动被转化为滑块的直线运动,从而推动活塞完成吸气、压缩、爆发和排气四个阶段的工作。
曲柄滑块的原理及应用概述曲柄滑块是一种常见的机械传动装置,主要由曲柄、滑块和连杆组成。
利用曲柄旋转运动,通过连杆将旋转运动转化为直线运动,实现力的传递和工作机构的运动控制。
曲柄滑块具有结构简单、传动效率高等特点,广泛应用于各个领域。
原理曲柄滑块的原理基于连杆机构和曲柄的旋转运动转化为滑块的直线运动。
连杆将曲柄的旋转运动转化为滑块的往复直线运动,实现力的传递。
曲柄滑块的基本结构如下: - 曲柄:具有一端固定,并可以绕自身轴线旋转。
- 连杆:将曲柄的旋转运动转化为滑块的直线运动。
- 滑块:沿连杆的方向进行往复直线运动。
曲柄滑块的工作原理如下: 1. 曲柄通过旋转运动带动连杆运动。
2. 连杆将曲柄的旋转运动转化为滑块的直线运动。
3. 滑块完成往复直线运动,实现力的传递和工作机构的控制。
应用曲柄滑块由于其结构简单、传动效率高等特点,被广泛应用于各个领域,以下是曲柄滑块的几个常见应用示例:1. 内燃机曲柄滑块机构被广泛应用于内燃机的气缸机构中。
内燃机中的曲轴就是一个曲柄滑块机构,通过活塞的上下运动,将往复直线运动转化为曲轴的旋转运动,从而带动车辆驱动轮的转动。
2. 压力机曲柄滑块机构在压力机中也得到了广泛应用。
通过曲柄滑块机构转化运动,将旋转运动转化为直线压力运动,实现对工件的压制和成型。
3. 石油钻机在石油钻机中,曲柄滑块机构用于转动钻杆来实现钻孔。
曲柄滑块机构将旋转运动转化为往复线性运动,带动钻杆快速下压和快速抬起。
4. 壁画机器人曲柄滑块机构还被应用于壁画机器人。
通过控制曲柄滑块机构的运动,实现壁画机械臂的运动控制,完成复杂的绘制工作。
5. 自动包装机在自动包装机中,曲柄滑块机构常用于输送和抓取物品的功能。
通过控制曲柄滑块机构的运动,可以实现快速而准确的物品传递和抓取。
总结曲柄滑块是一种常见的机械传动装置,通过将曲柄的旋转运动转化为滑块的直线运动,实现力的传递和工作机构的控制。
曲柄滑块具有结构简单、传动效率高等优点,被广泛应用于内燃机、压力机、石油钻机、壁画机器人、自动包装机等领域。
对心曲柄滑块机构工作原理1. 引言嘿,大家好!今天我们要聊聊一个在机械工程界可是小有名气的东西——心曲柄滑块机构。
听名字就觉得高大上,实际上它可不是什么遥不可及的东西,反而是咱们生活中常见的机械结构之一。
别看它名词复杂,实际上就像一场舞蹈,简单却充满了韵律感。
要不,咱们就一起来看看它到底是个啥玩意儿,工作原理又是怎样的吧!2. 心曲柄滑块机构的基本概念2.1 什么是心曲柄滑块机构?心曲柄滑块机构,其实就是一种能把旋转运动转化为直线运动的机械结构。
它的名字里有个“心”,这不是说它情感丰富,而是因为它的核心部分就像心脏一样,负责“跳动”。
简单来说,心曲柄就是个旋转的柄,而滑块则是沿着一条直线移动的部分。
想象一下,就像一个小孩在秋千上荡来荡去,既有旋转又有直线的运动,听起来是不是有点意思?2.2 为什么要用它?那么,心曲柄滑块机构有什么用呢?哎,您别说,这玩意儿可用在很多地方呢。
比如说,咱们日常用的打印机、汽车发动机、甚至一些复杂的机械手臂,都能看到它的身影。
它能把动力传递得相当流畅,就像在赛场上,一个接一个的传球,动作连贯,丝毫不显得笨拙。
3. 工作原理3.1 旋转与滑动的美妙结合心曲柄滑块机构的工作原理,其实就是旋转和直线的完美结合。
想象一下,有一个小圆盘(就是心曲柄),它在不停地转动。
这时候,固定在圆盘上的一根连杆(咱们可以叫它“小手”)也随着圆盘转动。
连杆的另一端呢,则是连接到滑块上的。
当连杆转动的时候,滑块就会跟着左右滑动,完成一个完整的运动周期。
就像一个富有节奏感的舞蹈,让人看得眼花缭乱。
3.2 运动过程中的变化这过程中,滑块的运动轨迹可不是直线,而是呈现出一种优美的弧形,仿佛在进行一场优雅的芭蕾舞。
每次连杆转动,滑块就会跟着调整位置,轻松自如地在轨道上滑动。
想象一下,如果我们用手在桌子上滑动一根铅笔,铅笔尖在桌面上留下的轨迹,就是这种滑动的感觉。
这个过程既简单又神奇,让人忍不住感叹机械的魅力。
曲柄滑块机构工作原理介绍曲柄滑块机构是一种常见的机械传动装置,它通过曲柄和滑块的运动实现机械系统的工作。
本文将详细介绍曲柄滑块机构的工作原理、结构特点以及应用领域等内容。
一、工作原理曲柄滑块机构是一种将旋转运动转化为直线运动的机械装置。
它由曲柄和滑块两部分组成。
1. 曲柄曲柄是曲柄滑块机构的主要部分,它通常是一根长杆,其中一端固定于机构的主轴上,另一端通过铰链连接于活动的连杆。
曲柄的主要作用是将旋转运动转化为直线运动,使滑块能够沿特定轨迹运动。
2. 滑块滑块是曲柄滑块机构中的动力元件,通常是一个带有导向槽的平板。
滑块通过导向槽与曲柄相连,当曲柄旋转时,滑块在导向槽的作用下沿特定轨迹进行直线运动。
滑块上通常会安装其他部件,如传感器、工作头等,用于完成特定的功能。
3. 工作过程曲柄滑块机构的工作过程可以分为四个阶段:进给段、短暂停留段、回程段和短暂停留段。
具体过程如下:•进给段:当曲柄开始旋转时,滑块从起始位置开始匀速向前运动,直到滑块达到最大前进位置。
•短暂停留段:滑块到达最大前进位置后,曲柄继续旋转,滑块短暂停留在此位置,为后续工作做准备。
•回程段:当曲柄继续旋转时,滑块开始匀速向后运动,直到滑块回到起始位置。
•短暂停留段:滑块回到起始位置后,曲柄继续旋转一段时间,滑块再次短暂停留在此位置。
二、结构特点曲柄滑块机构具有以下结构特点:1. 简单可靠曲柄滑块机构的结构相对简单,组成部件较少,易于制造和维修。
同时,机构的工作过程清晰明了,稳定可靠,不易出现故障。
2. 运动平稳曲柄滑块机构的滑块运动轨迹为直线运动,具有恒定速度特点,因此运动平稳,震动小,能够满足精密传动的要求。
3. 功能多样曲柄滑块机构可以根据不同的需求,通过改变曲柄的长度、滑块的轨迹以及其他附加部件的设计,实现不同的功能。
例如,可以用于驱动活塞进行往复运动、实现直线切割或焊接等操作。
4. 应用广泛曲柄滑块机构在工业生产中具有广泛的应用。
曲柄滑块机构条件(一)曲柄滑块机构条件什么是曲柄滑块机构?曲柄滑块机构是一种常见的机械传动机构,由曲柄、滑块和连接杆组成。
它通过曲柄的旋转使滑块在直线轨迹上运动,实现力的转换和传递。
曲柄滑块机构的应用领域曲柄滑块机构广泛应用于各种机械装置中,如发动机、压力机、冲压机等。
它具有结构简单、运动规律明确的特点,适用于各种工业领域的力传递和运动控制。
曲柄滑块机构的条件曲柄滑块机构的设计需要满足以下条件:•良好的刚度和稳定性:曲柄滑块机构在工作过程中承受着较大的载荷和振动,因此需要具备足够的刚度和稳定性,以确保其正常工作和长久使用。
•合理的运动特性:曲柄滑块机构的运动特性直接影响其传动效率和运动平稳性,需要根据具体应用要求设计合理的运动规律,如速度、加速度和位置曲线等。
•适当的润滑和密封:曲柄滑块机构的摩擦表面需要进行适当的润滑和密封处理,以减小摩擦损失和延长使用寿命。
•可靠的结构设计:曲柄滑块机构需要经过合理的结构设计,确保各个零部件之间的连接紧固可靠,避免因松动或磨损导致的故障。
曲柄滑块机构的设计要点在设计曲柄滑块机构时,需要注意以下要点:•合理选择曲柄和滑块的尺寸:根据所需的力传递和运动特性需求,选择适当的曲柄和滑块的尺寸,以保证其承载能力和运动平稳性。
•考虑滑块的回转角度:滑块在工作过程中可能会发生回转运动,需要合理设计回转角度和相关的约束装置,以确保机构的正常工作和稳定性。
•合理设置支撑点位置:支撑点的位置对曲柄滑块机构的运动轨迹和力传递效果有着重要影响,需要根据具体需求进行合理设置。
•设计合理的连杆:连杆作为连接曲柄和滑块的重要部件,需要具备足够的刚度和强度,同时根据运动规律进行优化设计,以提高机构的工作效率。
•考虑机构的运动平衡和振动抑制:在曲柄滑块机构设计中,需要考虑机构的运动平衡和振动抑制,通过合理的设计和调整,减小振动幅度和噪声。
结论曲柄滑块机构作为一种常见的机械传动机构,在工业领域发挥着重要作用。
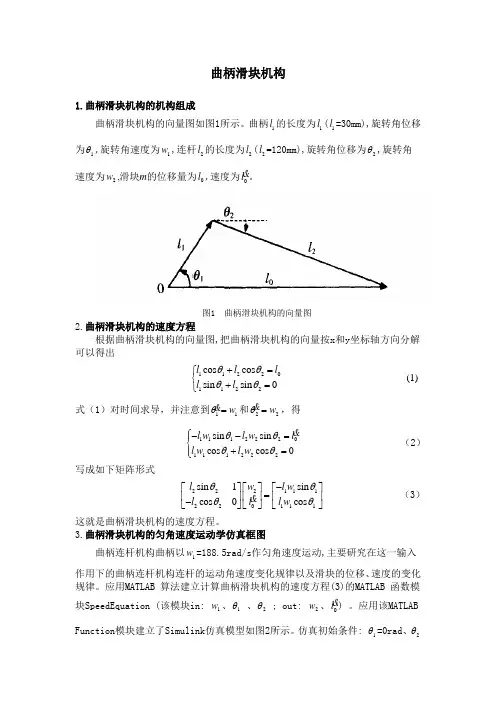
曲柄滑块机构1.曲柄滑块机构的机构组成曲柄滑块机构的向量图如图1所示。
曲柄1l 的长度为1l (1l =30mm),旋转角位移为1θ,旋转角速度为1w ,连杆2l 的长度为2l (2l =120mm),旋转角位移为2θ,旋转角速度为2w ,滑块m 的位移量为0l ,速度为0l 。
图1 曲柄滑块机构的向量图2.曲柄滑块机构的速度方程根据曲柄滑块机构的向量图,把曲柄滑块机构的向量按x 和y 坐标轴方向分解可以得出112201122cos cos sin sin 0l l l l l θθθθ+=⎧⎨+=⎩ (1) 式(1)对时间求导,并注意到11w θ=和22w θ=,得1112220111222sin sin cos cos 0l w l w l l w l w θθθθ⎧--=⎪⎨+=⎪⎩ (2) 写成如下矩阵形式222111022111sin 1sin cos 0cos w l l w l l l w θθθθ-⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦ (3) 这就是曲柄滑块机构的速度方程。
3.曲柄滑块机构的匀角速度运动学仿真框图曲柄连杆机构曲柄以1w =188.5rad/s 作匀角速度运动,主要研究在这一输入作用下的曲柄连杆机构连杆的运动角速度变化规律以及滑块的位移、速度的变化规律。
应用MATLAB 算法建立计算曲柄滑块机构的速度方程(3)的MATLAB 函数模块SpeedEquation (该模块in: 1w 、1θ 、2θ ; out: 2w 、0l ) 。
应用该MATLAB Function 模块建立了Simulink 仿真模型如图2所示。
仿真初始条件: 1θ=0rad 、2θ= 0rad 、0l =150 mm (仿真模型符号对应: omega1-1w ; omega2-2w ; theta1-1θ ; theta2-2θ ) 。
图2 曲柄匀角速运动时Simulink 仿真框图。
曲柄滑块机构分类
曲柄滑块机构是一种常见的机械传动机构,广泛应用于各种机械设备中。
根据不同的分类标准,曲柄滑块机构可以分为以下几类:
1. 单曲柄滑块机构
单曲柄滑块机构是最简单的一种曲柄滑块机构,由一个曲柄和一个滑
块组成。
曲柄通过旋转带动滑块做直线运动。
单曲柄滑块机构结构简单、制造方便,但只能实现单向运动。
2. 双曲柄滑块机构
双曲柄滑块机构由两个曲柄和一个滑块组成,可以实现往返运动。
双
曲柄滑块机构结构相对复杂,但可以实现多种运动形式,如直线运动、旋转运动等。
3. 三点式曲柄滑块机构
三点式曲柄滑块机构由三个点组成,包括两个曲柄和一个滑块。
三点
式曲柄滑块机构可以实现复杂的运动形式,如直线运动、旋转运动、
摆动运动等。
但由于结构复杂,制造难度较大。
4. 四杆机构
四杆机构是一种常见的机械传动机构,由四个杆件组成,其中两个为
曲柄,另外两个为连杆。
四杆机构可以实现复杂的运动形式,如直线
运动、旋转运动、摆动运动等。
四杆机构结构相对复杂,但可以实现
多种运动形式,应用广泛。
5. 其他曲柄滑块机构
除了上述几种常见的曲柄滑块机构外,还有一些其他类型的曲柄滑块机构,如双滑块机构、多滑块机构等。
这些机构结构复杂,应用范围较窄,但在某些特定领域具有重要的应用价值。
总之,曲柄滑块机构是一种常见的机械传动机构,根据不同的分类标准可以分为多种类型。
不同类型的曲柄滑块机构具有不同的结构和运动形式,应用范围广泛。
述说曲柄滑块机构的演化与由来
曲柄滑块机构是一种常见的机械运动机构,其最基本的结构包括曲柄、连杆和滑块三个部分。
曲柄滑块机构最早可以追溯到公元前3世纪左右,由希腊哲学家阿基米德发明。
他设计了一种水泵,其中就包含了曲柄滑块机构。
在欧洲中世纪时期,曲柄滑块机构被广泛应用于纺织机械、磨坊和振动器等机械中。
随着工业革命的到来,曲柄滑块机构得到了广泛的应用,并在汽车和机床等领域发挥了重要作用。
曲柄滑块机构的演化主要体现在材料、制造工艺、结构形式等方面的改进和创新。
比如,曲柄滑块机构的曲柄原来是由铸铁材料制成的,而现在则使用更轻、更强的合金材料。
此外,曲柄滑块机构的制造工艺也不断得到发展和更新,机械加工的技术和精度都得到了大幅提高。
在结构方面,曲柄滑块机构的形式也发生了变化,如增加了支撑杆、改变了滑块的形状等,以提高曲柄滑块机构的工作效率和稳定性。
总之,曲柄滑块机构是一种经典的机械运动机构,在工业和日常生活中都得到了广泛应用。
虽然曲柄滑块机构的基本结构没有改变,但其材料、制造工艺和结构形式等方面不断得到发展和创新。
这为曲柄滑块机构的应用提供了更广阔的空间和更好的前景。
曲柄滑块机构应用实例一、曲柄滑块机构的基本原理和结构曲柄滑块机构是一种常见的机械传动装置,它主要由曲柄、连杆和滑块三部分组成。
其中,曲柄是一个旋转体,连杆是一个运动体,滑块则是一个定位体。
当曲柄旋转时,通过连杆的运动将滑块带动进行往复直线运动。
二、曲柄滑块机构的应用领域1. 工程机械领域:如挖掘机、铲车等设备中常用到的液压缸就采用了曲柄滑块机构来实现往复直线运动。
2. 纺织机械领域:如织布机、缝纫机等设备中也广泛应用了曲柄滑块机构来实现针头的往复直线运动。
3. 汽车发动机领域:汽车发动机中的活塞也采用了曲柄滑块机构来实现往复直线运动。
4. 医疗器械领域:如手术刀等医疗器械中也常使用到了曲柄滑块机构来实现刀片的往复直线运动。
三、曲柄滑块机构在挖掘机中的应用实例以挖掘机中的液压缸为例,介绍曲柄滑块机构在工程机械领域中的应用实例。
1. 液压缸结构液压缸是工程机械中常见的一种执行元件,它主要由活塞、活塞杆、密封件、油口等部分组成。
其中,活塞和活塞杆通过密封件连接起来,形成了一个往复运动的整体。
油口则用来连接液压系统,通过液压力将活塞带动进行往复直线运动。
2. 液压缸原理液压缸是一种利用液体传递力量的装置,它主要依靠两个原理来实现工作:波义尔定律和帕斯卡定律。
波义尔定律指出,在静止不动的液体中,任何一个点所受到的压力都是相等的。
帕斯卡定律则指出,在一个封闭容器内施加一个外力时,这个外力将会被均匀地传递到容器内所有部分。
3. 液压缸工作过程液压缸的工作过程可以分为四个阶段:加油、伸出、收回和排油。
具体来说,当液压系统向液压缸内注入液体时,活塞开始向外移动,完成伸出操作;当需要收回活塞时,液压系统会将液体排出,使得活塞开始向内移动,完成收回操作。
4. 液压缸中的曲柄滑块机构在液压缸中,通过曲柄滑块机构来实现活塞的往复直线运动。
具体来说,曲柄是由发动机输出轴驱动的旋转部件,它通过连杆与滑块相连。
当曲柄旋转时,连杆带动滑块进行往复直线运动。
曲柄滑块机构及曲柄导杆机构的运动规律
曲柄滑块机构和曲柄导杆机构都是常见的机械传动机构之一,其运动规律如下:
1. 曲柄滑块机构的运动规律
曲柄滑块机构由曲柄、连杆和滑块组成。
当曲柄转动时,连杆带动滑块做直线往复运动。
曲柄的转动是匀速的,而滑块的速度则是变化的。
具体来说,滑块在前半周期内加速,后半周期内减速,且滑块的最大速度出现在过渡点处。
2. 曲柄导杆机构的运动规律
曲柄导杆机构由曲柄、连杆和导杆组成。
与曲柄滑块机构相比,曲柄导杆机构的特点是滑块被曲柄改为了导杆,使得滑块的运动方式发生了变化。
当曲柄转动时,导杆在导轨上做往复运动,同时连杆也产生了往复运动。
曲柄的转动是匀速的,导杆的速度也是变化的。
具体来说,导杆在前半周期内减速,后半周期内加速,且导杆的最大速度出现在过渡点处。
总之,曲柄滑块机构和曲柄导杆机构的运动规律都是由曲柄的匀速转动和连杆的往复运动所决定的。
不同的是,曲柄滑块机构中滑块的运动方式为直线往复运动,而曲柄导杆机构中导杆的运动方式为沿导轨做往复运动。
曲柄滑块机构滑块位移计算1. 引言嘿,朋友们,今天我们来聊聊一个听起来有点复杂但其实非常有趣的东西——曲柄滑块机构。
这可不是某种高深的数学公式,而是我们生活中经常能见到的一个小玩意儿!想想看,汽车的发动机、一些机械手臂,甚至某些玩具里面都可能用到这个机构,真的是无处不在,像老百姓的热水器一样,虽然看不见,但却在默默为我们服务。
那么,什么是曲柄滑块机构呢?简单来说,它是通过一个曲柄和滑块的配合,实现直线运动和旋转运动的转化。
你可以想象一下,当你转动一个把手,里面的曲柄就开始摇摆,而滑块就像跟着节奏舞动的舞者,跟着曲柄的节奏在轨道上滑行。
这种奇妙的转换其实在很多地方都能看到,比如家里的榨汁机、打印机,甚至一些健身器材,都是它在“辛勤工作”。
2. 曲柄滑块机构的基本原理2.1 工作原理好,咱们接下来深入点,看看这个机构是怎么工作的。
曲柄滑块机构的核心就是一个固定的轴心,曲柄围绕这个轴心旋转,而滑块在轨道上来回滑动。
就像一个旋转的小风车,风车的叶子不断转动,而下面的小车子随着风的方向在轨道上奔跑。
这个原理不仅简单,而且巧妙。
要说到滑块的位移计算,咱们得用到一些简单的几何知识。
不过,别担心,我不会让你看那些复杂的公式。
我们可以通过一些简单的图形和推理来理解。
首先,我们需要知道曲柄的长度、滑块的初始位置以及转角度。
这就像你在做一道菜,得先准备好所有的食材,才能下锅。
2.2 位移的计算接下来,咱们来聊聊如何计算滑块的位移。
假设曲柄的长度是L,转动的角度是θ,那么滑块的位移可以通过一些简单的三角函数来算。
你可以把它想象成一个小三角形,曲柄的旋转就像三角形的一个边在转动,而滑块的移动就是另外一条边的变化。
通过这两条边,我们就能轻松找出滑块的位移。
要是你觉得这有点儿复杂,也不用太担心,咱们可以把它当作一种有趣的游戏,尝试不同的角度,看滑块怎么移动,仿佛是在看一场小型的机械表演,滑块的每一次移动都像是在跳舞,每个转动的角度都在为它的舞步伴奏。
曲柄滑块机构运动分析
曲柄滑块机构运动分析
一、相关参数
在图1所示的曲柄滑块机构中,已知各构件的尺寸分别为mm l 1001=,mm l 3002=,s
rad /101
=ω
,试确定连杆2和滑块3的
位移、速度和加速度,并绘制出运动线图。
图1 曲柄滑块机构
二、数学模型的建立
1、位置分析
为了对机构进行运动分析,将各构件表示为矢量,可写出各杆矢所构成的封闭矢量方程。
C S l l =+21
将各矢量分别向X 轴和Y 轴进行投影,得
sin sin cos cos 22112211=+=+θθθθl l S l l C
(1)
由式(1)得
⎪⎪⎭
⎫
⎝⎛-=2112sin arcsin l l θθ
2211cos cos θθl l S C +=
2、速度分析
将式(1)对时间t 求导,得速度关系
C v l l l l =--=+222111222111sin sin 0
cos cos θωθωθωθω
(2)
将(2)式用矩阵形式来表示,如下所示
⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-11
11122222cos sin . 0 cos 1 sin θθωωθθl l v l l C (3)
3、加速度分析
将(2)对时间t 求导,得加速度关系
⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-11
11111222222222222sin cos 0 sin 0 cos 0 cos 1 sin θωθωωωθωθωαθθl l v l l a l l C C 三、计算程序
1、主程序
%1.输入已知数据 clear; l1=0.1; l2=0.3; e=0; hd=pi/180; du=180/pi; omega1=10; alpha1=0;
%2.曲柄滑块机构运动计算 for n1=1:721
theta1(n1)=(n1-1)*hd;
%调用函数slider_crank计算曲柄滑块机构位移、速度、加速度
[theta2(n1),s3(n1),omega2(n1),v3(n1),alpha2(n1),a3( n1)]=slider_crank(theta1(n1),omega1,alpha1,l1,l2,e); end
figure(1);
n1=0:720;
subplot(2,3,1)
plot(n1,theta2*du);
title('连杆转角位移线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('连杆角位移/\circ');
grid on
subplot(2,3,2)
plot(n1,omega2);
title('连杆角速度运动线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('连杆角速度/rad\cdots^{-1}');
grid on
subplot(2,3,3)
plot(n1,alpha2);
title('连杆角加速度运动线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('连杆角加速度/rad\cdots^{-2}');
grid on
subplot(2,3,4)
plot(n1,s3);
title('滑块位移线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('滑块位移/\m');
grid on
subplot(2,3,5)
plot(n1,v3);
title('滑块速度运动线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('滑块速度/m\cdots^{-1}');
grid on
subplot(2,3,6)
plot(n1,a3);
title('滑块加速度运动线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('滑块加速度/m\cdots^{-2}');
grid on
2、子程序
function[theta2,s3,omega2,v3,alpha2,a3]=slider_cran k(theta1,omega1,alpha1,l1,l2,e);
%计算连杆2的角位移和滑块3的线位移
s3=l1*cos(theta1)+l2*cos(theta2);theta2=asin((e-l1*si n(theta1))/l2);
%计算连杆2的角速度和滑块3的线速度
A=[l2*sin(theta2),1;-l2*cos(theta2),0];
B=[-l1*sin(theta1);l1*cos(theta1)];
omega=A\(omega1*B);
omega2=omega(1);
v3=omega(2);
%计算连杆2的角加速度和滑块3的线加速度
At=[omega2*l2*cos(theta2),0;omega2*l2*sin(theta2), 0];
Bt=[-omega1*l1*cos(theta1);-omega1*l1*sin(theta1)] ;
alpha=A\(-At*omega+alpha1*B+omega1*Bt);
alpha2=alpha(1);
a3=alpha(2);
四、程序运行结果及分析
图2 运动规律曲线图
从仿真曲线可以看出,当曲柄以w1=10rad/s匀速转动时,连杆的转角位移变化范围大约在-20~20度之间,在90°或270°有极值,呈反正弦变化趋势;连杆的角速度变化范围大约在-3.3~3.3rad/s,在0°或180°有极值,成反余弦变化趋势;连杆角加速度变化范围大约在-35~35rad/s2,在90°或270°有极值,呈正弦变化趋势。
滑块位移变化范围大约在0.2~0.4m之间,在0°或180°有极值,呈反余弦变化趋势;滑块速度变化范围大约在-1~1m/s之间,大致上呈正弦变化趋势;滑块加速度变化范围大约在-13~6.9m/s2,在0°或180°有极值。