基于ADAMS的摆盘机构动力学仿真分析
- 格式:pdf
- 大小:735.43 KB
- 文档页数:3
实验二单摆机构的动力学模拟一、实验目的1.掌握多体动力学分析软件ADAMS中实体建模方法;2.掌握ADAMS中施加约束和驱动的方法;3.计算出单摆运动的位移、速度和加速度。
二、实验设备和工具1.ADAMS软件;2.CAD/CAM机房。
三、实验原理按照单摆机构的实际工况,在软件中建立相应的几何及约束模型,即按照单摆机构的实际尺寸,建立单摆几何实体模型;把摆臂和大地之间的实际连接简化成铰连接,从而在软件中建立其连接副模型;按照摆臂初始运动的参数,如初始转角和转速建立相应的驱动模型;然后利用计算机进行动力学模拟,从而可以求得摆臂在实际工况下的任何时间、任何位置所对应的位移、速度加速度,以及摆臂和大地铰接点处的约束反力等一系列参数。
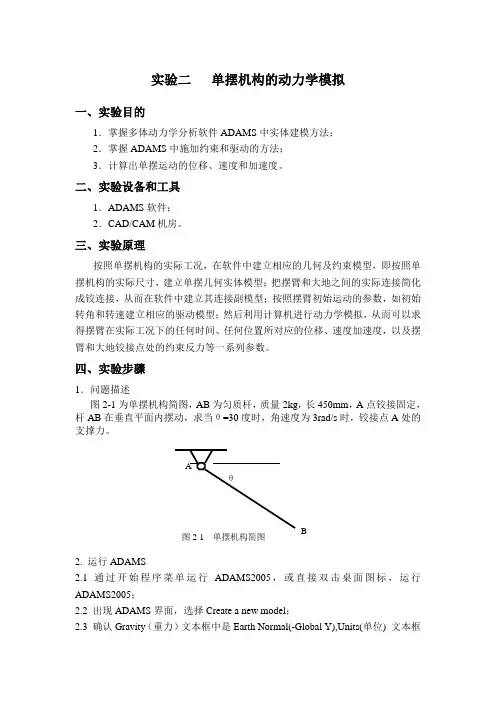
四、实验步骤1.问题描述图2-1为单摆机构简图,AB为匀质杆,质量2kg,长450mm,A点铰接固定,杆AB在垂直平面内摆动,求当θ=30度时,角速度为3rad/s时,铰接点A处的支撑力。
2. 运行ADAMS2.1 通过开始程序菜单运行ADAMS2005,或直接双击桌面图标,运行ADAMS2005;2.2 出现ADAMS界面,选择Create a new model;2.3 确认Gravity(重力)文本框中是Earth Normal(-Global Y),Units(单位) 文本框中是MM ,K ,S ,确认后单击OK 按钮;2.4 在Settings 下拉菜单中选择Working Grid ,系统打开参数设置对话框,在spacing 栏,X 和Y 都输入25mm 。
3. 建立几何模型3.1 用鼠标右键单击几何工具箱,弹出级联图标,用鼠标左键选中杆件图标;3.2 系统打开参数设置对话框,如图2-2所示,确认在工具箱下方文本框中显示New Part 。
选中Length 选项,输入45.0cm ,即摆臂长度。
选种width 选项,输入2.0cm ,选中Depth 选项,输入2.75cm ;3.3 按F4打开坐标框,鼠标单击(-225,0,0)作为摆臂的左侧起点,然后单击右侧水平方向任一点,ADAMS 自动生成摆臂,如图2-3所示;4. 设置模型参数4.1 设置摆臂质量鼠标右键单击摆臂Part_2,在右键打开的快捷菜单中选择Modify ,弹出修改对话框,在Define mass by 栏中选择User Input.,在Mass 栏输入2.0,单击OK 按钮。
龙源期刊网
基于Adams的摆杆输送机动力学仿真分析作者:高先海韩业鹏张群
来源:《计算机辅助工程》2012年第06期
摘要:采用Adams脚本语言建模,自动完成摆杆输送机整体系统的轨道、链条、摆杆和工件之间的装配约束和载荷边界条件的设定等.对某卡车白车身涂装过程进行动力学仿真分
析,求得系统整体运行时所需的驱动力大小、链节间的相互作用力和进行静力学分析所需的载荷条件等,分析结果可指导摆杆输送机的整体设计.
关键词:
汽车涂装;电泳线;链条;装配约束;驱动力; Adams;脚本语言
中图分类号: TH123 文献标志码: B。
MSC Adams是一种常用的多体动力学仿真软件,它可以用于研究和分析机械系统、运动学和动力学特性。
下面简要介绍MSC Adams的基础知识和实例解析:
1. 多体动力学基础:
-刚体和连接:MSC Adams使用刚体模型来表示物体,可以定义物体的质量、惯性矩阵和几何形状。
通过连接件(约束)将多个物体连接在一起,可以模拟各种机构系统。
-动力学模型:通过定义物体的受力和力矩,可以建立动力学模型。
这些力可以包括重力、摩擦力、弹簧力等,可以根据需要进行自定义。
-运动学分析:可以分析物体的位置、速度、加速度以及各个连接件之间的相对运动关系。
2. 实例解析:
-车辆悬挂系统:通过建立车辆悬挂系统的多体动力学模型,可以分析车轮与地面的接触力、悬挂系统的行程和动态响应等。
这有助于改善车辆的悬挂性能和乘坐舒适性。
-机械臂运动学和动力学分析:通过建立机械臂的多体动力学模型,可以分析机械臂在不同工作状态下的位姿、速度和加速度。
这有助于优化机械臂的设计和运动控制算法。
-飞机起落架系统:通过建立飞机起落架系统的多体动力学模型,
可以分析起落架在着陆和起飞时的动态响应和受力情况。
这有助于改进起落架的设计和耐久性。
-振动系统:通过建立振动系统的多体动力学模型,可以分析系统的固有频率、振动模态和受力情况。
这有助于评估结构的稳定性和设计适当的减振措施。
以上是MSC Adams多体动力学仿真的基础知识和一些实例解析。
通过使用MSC Adams,工程师和研究人员可以更好地理解和优化复杂机械系统的动力学特性。
基于adams的摆环机构运动仿真及优化设计:
摆环机构是一种基本的机械运动装置,它具有结构简单、节省空间、运动可靠性高等
特性,被广泛应用于机床、注塑机等多个机械工程。
Adams是用于机械系统动力学仿真的一种软件,它可以用来仿真摆环机构的运动时响应特性,为优化设计提供了有效支持。
Adams能够仿真摆环机构流程和多个运动参数之间的相互作用,可以准确表示摆环机
构运动变化,是实现摆环机构优化设计的重要工具。
举例来说,Adams能够根据摆环机构
内部参数计算两个自由度的力学链条参数,并计算其运动特性,为给定的摆环机构结构指
定精确的位置。
此外,由于Adams可以模拟摆环机构内部多个参数之间的相互影响,因此
能够准确预测摆环机构的运动变化。
Adams的优势还可以体现在优化设计中。
借助于Adams,我们可以从一系列不同的输
入参数,其中包括质量、运动参数、力学链条等参数,寻求摆环机构最优解。
Adams还可
以模拟出足够精确的摆环机构运动轨迹,利用这些模拟数据来确定新的摆环机构结构及运
动参数的一系列范畴,通过这种设计也可以实现优化设计的效果。
另外, Adams还可以实现精确模拟,以及流体动力学分析等多种功能,同时也可以进行参数优化和对比分析,根据收集的实际数据,快速验证摆环机构的结构参数和运动参数,从而可以更有效地实现优化设计,提高生产效率。
总之,Adams可以用于摆环机构的仿真和优化设计,其准确的运动仿真和多功能优化
支持使得摆环机构可以更加精确的满足设计要求,从而提升设计效率。
adams动力学仿真原理
Adams是一种基于动力学原理进行仿真的软件,它使用多体
动力学理论和计算力学算法,对系统中的物体进行建模和仿真,以模拟真实的物体运动和相互作用。
Adams的仿真原理主要基于以下几个方面:
1. 多体动力学:Adams使用多体动力学理论来描述系统中的
物体运动。
多体动力学是物体受力和受力作用导致的加速度之间的关系。
通过建立质点、刚体或弹性体等物体的动力学模型,并考虑物体之间的相互作用,可以求解物体的运动轨迹、速度和加速度等。
2. 约束条件:Adams支持对系统中物体之间的各种约束条件
进行建模和仿真。
约束条件可以是几何约束,如固定连接、旋转关节、滑动关节等,也可以是物理约束,如弹簧、阻尼器等。
Adams利用这些约束条件来限制物体的运动范围,并求解约
束条件下的系统运动。
3. 接触和碰撞:Adams还考虑了系统中物体之间的接触和碰撞。
通过建立接触模型和碰撞模型,Adams可以模拟物体之
间的接触力和碰撞力,并根据物体的质量、形状和速度等参数计算物体的反应。
4. 动力学求解:Adams使用高效的动力学求解算法,通过求
解物体运动的微分方程组,得到物体的运动轨迹、速度和加速度等。
求解过程中,Adams考虑了物体之间的相互作用和约
束条件,并根据物体的质量、惯性、摩擦力等参数计算物体的运动状态。
总的来说,Adams的仿真原理基于多体动力学理论和计算力学算法,并考虑了物体之间的约束、接触和碰撞等相互作用,以模拟系统中物体的真实运动和行为。
adams动力学仿真原理一、引言动力学仿真是一种模拟真实物体运动及其相互作用的方法。
在工程领域,动力学仿真被广泛应用于设计、分析、优化以及预测产品或系统的性能。
Adams动力学仿真软件是一款功能强大的工程仿真软件,能够模拟具有复杂运动学和动力学特性的多体系统。
本文将介绍Adams动力学仿真的原理和应用。
二、运动方程和受力分析Adams基于牛顿力学和欧拉法则,通过求解运动方程来描述仿真对象的运动。
运动方程可以通过对系统中所有物体的质量、惯性矩阵以及施加在物体上的外力进行受力分析得到。
Adams提供了丰富的数学建模工具,能够精确地描述物体的几何特性、物理特性以及约束关系。
三、约束建模约束是Adams仿真中的重要概念,用于描述系统中物体之间的约束关系。
Adams支持多种约束类型,包括关节约束、接触约束、力学约束等。
通过合理地定义约束条件,可以准确地模拟物体间的接触、连接和约束。
在进行仿真前,需要根据系统的需求设置适当的约束条件,以确保仿真结果的准确性和可靠性。
四、力学属性在Adams中,物体的力学属性包括质量、惯性、刚度、阻尼等。
通过设置这些属性,可以模拟物体运动时受到的惯性力、重力、弹力、摩擦力等作用。
适当地设置力学属性,能够更加真实地模拟物体的运动行为,并实现精确的仿真分析。
五、控制器建模为了模拟真实系统中的控制装置,Adams提供了控制器建模工具。
控制器可以对系统中的物体施加不同的力或者施加控制策略来实现特定的运动目标。
通过设置适当的控制器参数和策略,可以对系统进行精确的控制和仿真分析。
六、仿真结果分析Adams提供了丰富的仿真结果分析工具,能够对仿真结果进行可视化、数据分析和优化。
通过这些工具,用户可以直观地观察仿真结果,分析系统的运动特性、力学响应以及能耗情况。
此外,Adams还支持与其他工程软件的数据交换,方便用户将仿真结果与实际工程设计相结合。
七、应用案例Adams在许多领域都得到了广泛的应用,例如汽车工业、航空航天、机械设计等。
基于ADAMS的曲柄摆杆机构的运动分析作者:程熊豪来源:《科技资讯》 2015年第2期程熊豪(武汉理工大学物流学院湖北武汉 430063)摘要:曲柄摆杆机构能将旋转运动转换为直线运动,常常作为动力源(如旋转式电动机)与直线运动形式的执行机构,是现代机械设备中一种十分常见的核心执行装置。
针对某工程中曲柄摆杆机构设计中的运动学问题,基于ADAMS仿真软件建立了曲柄摆杆机构的虚拟样机模型,并对虚拟样机模型进行运行学特性分析与仿真,分析了作为执行机构的滑块上工作点的位移、运动速度和加速度变化规律,得出作为动力输入曲柄的驱动力矩曲线,从而为曲柄摆杆机构的结构设计和控制系统的设计提供参考。
关键词:曲柄摆杆运动分析 ADAMS 机构中图分类号:TH112 文献标识码:A 文章编号:1672-3791(2015)01(b)-0014-02曲柄摆杆机构具有构件形状简单、加工方便、可承受较大载荷等诸多优点,因此,曲柄摆杆机构在现代机械设备中有着非常广泛的应用。
该机构可以将周期转动的运动形式转化为直线运动,而且具有结构简单、制造容易、工作可靠等优点,因此在工程中得到了广泛的应用。
最典型的是牛头刨床机构。
但是,传统的曲柄摆杆机构设计多采用图解法或实验法,其过程复杂繁琐、设计周期长、稳定性差、精度不高,难以达到设计要求。
尽管采用解析法可以得到较高的计算精度,但该方法存在推导公式复杂,计算工作量大,且获得的结果过于抽象,达不到形象直观的要求。
ADAMS是机械系统动态仿真软件的应用软件,用户可以运用该软件非常方便地对虚拟样机进行静力学、运动学和动力学分析,可视化地输出位移、速度、加速度和反作用力曲线。
通过ADAMS软件对曲柄摆杆机构进行运动学分析,能够克服图解法分析过程复杂、精度低等问题。
针对某一项目,利用曲柄摆杆机构的滑块作往复直线运动的功能,实现滑块到达目标位置后可以回到初始位置的基本动作。
同时,设计曲柄摆杆机构时需要对其进行运动分析,以判断能否完成所需动作要求。

文章编号:1002-6886(2005)04-0062-02基于ADA M S 和ANS Y S 的动力学仿真分析侯红玲1,2,赵永强1,魏伟锋1(1.陕西理工学院机电工程系,陕西 汉中 723003;2.西安交通大学,陕西 西安 710049) 注:本文受陕西理工学院机械设计与理论省级重点学科资助。
作者简介:侯红玲(1976—),女,工作于陕西理工学院机电系,现为西安交通大学在读硕士,研究方向为机械CAD /CAM /CAE 。
收稿日期:2005-3-16摘要:针对ANSYS 软件不适合机械动力学分析,ADAMS 软件不适合有限元分析的状况,提出了将ANSYS 和ADAMS 两种分析软件结合起来对柔性体进行仿真分析,通过仿真实例验证了此方法的可行性。
关键词:动力学仿真 刚体 柔性体 ADAMS ANSYSK i n eti c S i m ul a ti n g and Ana lyz i n g Ba sed on ADA M S and ANS Y SH O U Hong 2li n g,ZHAO Y ong 2q i a ng,W E IW e i 2fengAbstract:ANSYS doesn ’t fit t o analyze mechanical dyna m ics and ADAM S doesn ’t fit t o finite element analyzing .The paper puts for ward combining ADAMS and ANSYS t o analyze and si m ulate flexible components,app r oving the method feasible thr ough si m ulating ex 2a mp le .Key words:kinetic si m ulati on;rigid body;flexible body;ADAM S;ANSYS1 引言一般来说,静力学分析能保证一个机构可以承受一定的稳定载荷,但当机构受到运动载荷时,就需要对其进行动力学分析。
基于ADAMS软件的摆动导杆机构的运动学分析一、背景:摆动导杆机构是一种应用比较广泛的平面连杆机构,例如牛头刨床上就用了这种机构。
它将曲柄的旋转运动转换成为导杆的往复摆动。
机构相对简单易懂,对于我们初学ADAMS的学生来说便于建模和分析。
二、利用ADAMS的优点:对于摆动导杆机构的运动分析,常用的方法有图解法和解析法。
图解法:直观、方便,但精度不高,需要反复做图。
解析法:人工计算运算量大,容易出错。
利用ADAMS可以产生复杂机械系统的虚拟样机,真实地仿真其运动过程。
精确度很高,而且将计算工作交给计算机能省去大量人工,并且不容易出错。
三、建立力学模型:图中为摆动导杆机构曲柄AB为原动件导杆BC为从动件通过滑块B将曲柄AB的连续转动转变为导杆BC的往复摆动。
四、建立样机模型:首先是给定模型具体的参数:各杆的杆长以及曲柄AB的转速。
利用ADAMS建立样机:根据几何关系确定A、B、C三点的坐标,可以假定C为坐标原点从而确定模型。
再各零件之间建立相应的约束副。
固定副:机架转动副1:曲柄、机架转动副2:曲柄、滑块转动副3:导杆、机架移动副:滑块、导杆右图为理论的样机图下图为实际做的时候建立的样机图,比较理论的样机图,我没有专门建立一个杆将其锁为机架,而是直接在坐标轴上建立了2个点,将坐标轴当作了ac杆。
附图如下五、仿真分析:通过已经建立好的模型给出曲柄的转速,就可以利用ADAMS自动输出构件的位移、速度、加速度等详细的参数。
并且利用这些输出值可以通过ADAMS/View以图形形式输出,从而能清晰地看出他们在仿真过程中的变化规律。
六、具体参数:W=5rad/s AB(主动件)=100mm AC(固连机架的杆)=350mm七、输出图:本图为滑块的位移图。
图中红色线为x方向的位移。
蓝色线为y方向的位移,合成图为一直线。
从图中可以看出滑块进行往复运动,轨迹为一个圆。
本图为滑块的速度图。
图中红色线为x方向的速度。
蓝色线为y方向的速度,合成图为一直线。
ADAMS对单摆的建模与仿真分析姓名:班级:学号:单摆作业:已知: 摆杆质量M1=0.002kg,小球质量M2=12kg, 摆杆长度l=40.0cm, g=9.8m/s² ,初始摆角α=30º, 结束时间(End time):5.0 , 步长(Steps ):500一.建立单摆模型1.设置参数2. 建立摆杆模型3.设置摆臂位置4.建立球模型5.设置摆臂和球的质量6.建立单摆支点7.建立摆杆和球铰接二.验证模型及仿真(1)点击工具箱中的仿真图标,系统打开参数设置对话框,将End Time设为5.0,Steps设为500。
(2)点击开始按钮,单摆开始摆动,测量窗口出现测量曲线位移、速度、加速度仿真曲线角度、角速度、角加速度仿真曲线三.计算结果、仿真结果及其验证1.通过计算结果和仿真结果进行比较,进行验证。
计算:对小球进行受力分析,小球在重力作用下进行单摆运动。
1)、周期T=2π√(l/g ) =1.27 s2)、速度分析小球在最低点α=0°时,加速度为0,重力势能全部转化为动能,速度最大:由Mg∆h=1/2Mv²得v=2√g∆h ,而∆h=l(1-cosα)当α=0º时,带入上式,可知速度 vmax=1.025m/s ;当α=30º时,带入上式,可知速度 v=0 m/s 3)、加速度分析在重力作用下,小球在最高点处的切向加速度为:at=gsinα将其分解为水平方向的加速度: ax =atcosα=gsinα∗cosα=0.5gsin2α当α=0°时 ax =0 m/s²;当α=30º时,ax =4.244 m/s²4)、角速度分析速度角速度转化公式:V=rω当α=0º时,角速度ω=v/r=3.364 rad/s ;当α=30º时,角速度ω=0 rad/s5)、角加速度分析切向加速度与角加速度的关系:at=α∗r当α=30°时α=at/r=4.243/0.4=10.608 rad/s²;当α=0°时α=0 rad/s²(m/)2.误差分析相对误差=▏测量值-计算值▕/计算值×100%ΔT= ▏1.28-1.27▕/1 .27×100%=0.787%Δs = ▏0.2055-0.2▏/0.2-×100%=2.75%Δv= ▏1.01-1.025▏/1.025×100%=1.468%Δa= ▏4.177-4.244▏/4.244×100%=1.58%Δω= ▏2.537-2.563▏/2.563×100%=1.01%Δα = ▏11.93-10.61▏/10.61×100%=12.4%结论:对仿真结果进行分析得通过上边的误差计算分析,可看出周期、位移、速度、加速度、角速度误差均在允许范围内,发现其结果相差很小,几乎可以忽略不计,故可以认为模拟仿真的结果是正确的。
基于ADAMS的六杆机构运动学及动力学仿真分析吕鲲;袁扬【摘要】To make a six-bar mechanism of shaper to be more reasonable,a kinematic model of six-bar mechanism of shaper was established with the vector analytic method and the kinematic analysis was carried out by the simulation software ADAMS.The simulation results reveal the curves of plough head's displacement,velocity and acceleration.Then the mathematical movement model of dynamics of the six-bar mechanism of shaper was established with the isolated body method and the dynamical simulation analysis on the model was carried out by the simulation software ADAMS.The force information of each component and the balance moment of the actuator are drawn from the results of simulation.Finally,by comparing the simulation results with theoretical calculation,its simulation results were verified.This simulation method with ADAMS provides a theoretical reference for the actual mechanism design.%为了使牛头刨床六杆机构设计更加合理,运用矢量解析法建立牛头刨床六杆机构运动学模型,并运用ADAMS软件对其进行运动仿真,得出牛头刨床刨头的位移、速度和加速度随时间变化的规律曲线.用分离体法建立该六杆机构的动力学模型,并运用ADAMS软件对其进行动力学仿真分析,获得各构件的受力情况和原动件的平衡力矩,为机构的优化设计提供了理论参考.【期刊名称】《河南理工大学学报(自然科学版)》【年(卷),期】2012(031)005【总页数】6页(P555-560)【关键词】ADAMS;六杆机构;动力学【作者】吕鲲;袁扬【作者单位】河南理工大学机械与动力工程学院,河南焦作454000;河南理工大学机械与动力工程学院,河南焦作454000【正文语种】中文【中图分类】TH113.220 引言牛头刨床是金属切削类机床中刨削类机床的一种,主要用于单件小批量生产,加工平面、成型面和沟槽等.工作原理为当主动件曲柄匀速转动时,摇杆左右摆动,带动刨刀沿着固定的轨迹运动,实现将回转运动转化为直线往复运动的功能.牛头刨床机构具有急回特性,即刨刀在切削工作行程中速度较慢,且要求平稳,切削完成后快速空载返回到原来的位置.因此,对速度平稳性的影响难以凭经验判断.为了确定刨刀运动是否满足要求,就必须对其进行仿真分析.以往对牛头刨床六杆机构进行研究主要从运动学或参数优化进行分析.其中,文献[4-5]分别论述了用ADAMS和SIMULINK建立牛头刨床仿真模型的过程,并对其进行了运动学仿真.文献[6]利用ADAMS建立了锁紧臂机构的动力学模型,并对其进行了参数化分析研究,进而实现了机构的优化设计.文献[7]利用ADAMS对空气捻结器剪切机构进行运动学仿真分析,验证了凸轮连杆机构的可行性和合理性,同时也为空气捻结器剪切机构优化设计提供了理论依据.文献[8-9]分别对牛头刨床机构进行了动力学分析,建立了动力学模型,并对其进行了动力学仿真,为机构动力学参数优化提供依据.文献[10]对机械式压力机曲柄六杆机构进行了运动学特性分析,建立了数学模型并通过仿真进行了对比,为机构进一步分析奠定了基础.本文以比较典型的六杆机构牛头刨床为例,运用矢量解析法和矩阵法建立六杆机构的运动学及动力学模型,利用ADAMS软件强大的动力学分析功能,对牛头刨床六杆机构进行动力学仿真.1 运动学分析1.1 数学模型的建立牛头刨床六杆机构的运动简图如图1所示.已知l1=125 mm,l3=600 mm,l4=150 mm,l5为从动件,设构件3,4,5的质量分别为m3=20 kg,m4=3 kg,m5=62 kg;构件1,2的质量忽略不计,各杆的质心都在杆的中点处,构件3,4绕质心的转动惯量JS3=0.12 kg/m2,JS4=0.00 025 kg/m2,该机构在工作进程时刨头5受与行程相反的阻力Fr=5 880 N.根据以上要求,牛头刨床关键点坐标设置如表1所示.表1 牛头刨床关键点坐标Tab.1 The coordinates of key points of shaper关键点Point _APoint_BPoint_CPoint_DPoint_E坐标值(0,275,0)(125275,0)(0,0,0)(248.24,546.24,0)(101.02,575,0)1.1.1 位移分析先建立一直角坐标系,C点为坐标原点,并标出各杆矢量及其方位角,各构件构成矢量封闭形,机构各矢量构成2个矢量封闭方程为l6+l1=s3, (1)l3+l4=l6+sE, (2)将式(1)(2)写成两坐标轴上的投影式,得l1cos θ1=s3cos θ3,l6+l1sin θ1=s3sin θ3, (3)l3cos θ3+l4cos θ4=sE,l3sin θ3+l4sin θ4=l6. (4)联解以上式子,即可求得滑块2沿摆动杆3的位移量s3,构件3,4的角度θ3,θ4及刨头E点的位移量sE.1.1.2 速度分析由式(3),(4)对时间求导,写成矩阵形式得(5)解线性方程组(5)即可求得滑块2沿摆动杆3的滑动速度构件3,4的角速度ω3,ω4及刨头E点的速度vE.1.1.3 加速度分析由式(5)对时间求导,写成矩阵形式得(6)解线性方程组(6)即可求得滑块2沿摆动杆3的滑动加速度构件3,4的角加速度α3,α4及刨头E点的加速度αE.由以上各式,即可得到牛头刨床六杆机构刨头E点的位移、速度和加速度.1.2 运动学建模及仿真1.2.1 创建模型及添加运动副和驱动根据表1中各关键点坐标,建立曲柄1,滑块2,摆动杆3,连杆4和刨头5模型,如图2所示.根据各构件之间的运动副关系添加运动副,并选择曲柄1为主动件,添加旋转驱动,完成运动的设置.1.2.2 运动仿真及结果后处理运行仿真后,将测量出的原动件曲柄1的转动角度与刨头E点的位移、速度和加速度放在同一坐标系中(图3).由图3可以看出,原动件转动在何种位置时,刨头E点的位移、速度和加速度最大(或最小).通过ADAMS的后处理,可得刨头E点的最大位移与最小位移分别为128.1,-417.3 mm,故其行程为545.4 mm.从图3中可以看出,刨头在切削进程阶段比较平稳,在返回时较快,说明六杆机构具有急回特性,与实际情况相符合,满足要求.在理论计算中,当曲柄1与摆动杆3垂直时,刨削位置达到极限位置,由此可算出θ1为333 °和207°.根据式(3)、(4)可计算出极限位移,故行程S=|127.93-(-416.85)|=544.78 mm.与仿真结果相当,因此仿真是正确的.2 动力学分析2.1 数学模型的建立根据前述运动学仿真求得的相关构件加速度值,可确定出各构件所受的惯性力及惯性力矩.各构件受力如图4所示,设Fi为作用在第i个构件上的惯性力,Mi为第i个构件上的惯性力矩,Md为加在构件1上的平衡力矩,根据构件上所有外力在x轴上的投影的代数和为零,构件上所有外力在y轴上的投影的代数和为零以及构件上所有外力对其质心Si的力矩代数和为零,对各构件列平衡方程如下.对构件1有F21x+F61x=0,F21y+F61y=0,-(yB-yA)F21x+(xB-xA)F21y+Md=0. (7)对构件2有F12x+F32x=0,F12y+F31y=0. (8)因各力对质心取矩代数和恒为零,故无法列出力矩平衡方程.根据几何约束条件,可以列出以下方程作为补充方程,即F32xcos θ3+F32ysin θ3=0. (9)对构件3有F43x+F23x+F3x+F63x=0,F43y+F23y+F3y+F63y-m3g=0,-(yD-yS3)F43x+(xD-xS3)F43y-(yB-yS3)F23x+(xB-xS3)F23y+(yS3-yC)F63x-(xS3-xC)F63y+M3=0. (10)对构件4有F54x+F4x+F34x=0,F54y+F4y-m4g+F34y=0,-(yE-yS4)F54x-(xS4-xE)F54y+(yS4-yD)F34x+(xD-xS4)F34y+M4=0. (11)对构件5,由于导路对刨头5只产生垂直反力F65,但力作用点未知.因此可以这样处理:把反力F65向质心S5简化,可得反力F65和反力矩M65.列方程如下,即F45x+Fr+F5x=0,F45y+F65-m5g=0,F45yxS5+M65=0. (12)将上述各构件的平衡方程式,整理成以运动副反力和平衡力矩为未知量的线性方程组,并写成矩阵形式,即CFR=D, (13)式中:C为系数矩阵;FR为未知力矩阵;D为已知力矩阵,其中.2.2 动力学建模与仿真2.2.1 添加质量和转动惯量及阻力按已知条件分别设置曲柄1,滑块2,摆动杆3,连杆4和刨头5的质量和转动惯量,并对刨头5设置阻力Fr=5 880 N,完成动力学仿真的设置.2.2.2 动力学仿真及结果后处理仿真结束后,右击曲柄1与大地之间运动副JOINT_1即可查看运动副A处的约束反力及平衡力矩Md,如图5和图6所示.刨头5所受阻力Fr如图7所示,同时也可以查看刨头5所受的垂直反力F65随时间的变化曲线,如图8所示.从图5可以看出,牛头刨床刨头在工作进程中,机构在x(水平)方向的受力明显比y(垂直)方向要平滑些,且力的方向没有变化,而y(垂直)方向的受力却出现了较大的变化.因此可以得出,y(垂直)方向的受力主要是由于机器振动而引起.由图6可以看出,牛头刨床刨头在工作进程中,平衡力矩变化较平缓,而空行程时变化较大,符合实际要求,故仿真是正确的.3 结语通过六杆机构仿真输出曲线图可以看出:牛头刨床工作进程中速度较平稳,加速度值较小;回程时速度变化大,加速度值也较大,具有急回特性,仿真结果与实际相符合.运用ADAMS仿真直观揭示了牛头刨床刨头的运动规律和各构件的受力状态,与矩阵求解相比,更加形象生动.通过对牛头刨床六杆机构进行建模、运动学及动力学仿真分析,实现了机构设计的形象化和量化的完美统一,大大提高了设计效率和质量,节省了时间和成本.参考文献:[1] 敏政,邵翔宇,王乐,等.多目标规划下的牛头刨床优化设计[J].机械与电子,2009(9):24-26.[2] 黎新,王国彪.牛头刨床的遗传优化设计[J].机床与液压,2006(10):40-42.[3] 陈立平.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005:15-200.[4] 李旭荣,郑相周.基于ADAMS的牛头刨床工作机构虚拟样机设计与动态仿真[J].中国工程机械学报,2007,5(4):437-439.[5] 李龙海.基于SIMULINK的平面六杆机构仿真分析[J].机械设计与制造,2009,10(1):154-156.[6] 杨双龙,战强,马晓辉,等.基于ADAMS的锁紧臂机构的动力学仿真及参数化分析[J].机械设计与制造,2010,11(11):26-28.[7] CHANG DEGONG, LI HENG, XIAO ZHIJUAN, et al. Kinematics Simulation of Air Splicer Shearing Mechanism Based on ADAMS[C]//2009 Second International Conference on Intelligent Computation Technology and Automation-ICICTA2009, IEEE Computer Society. 2009: 75-77.[8] 张国凤,李革,赵匀.两种牛头刨床机构的动力学特性分析与比较[J].农机化研究,2005,5(3):66-68.[9] 宋晓华,方坤礼,吴军.基于Matlab的机构动力学仿真分析[J].煤矿机械,2005(2):51-53.[10] 王栗,覃岭,阮卫平,等.机械式压力机曲柄六杆机构运动学特性分析[J].机械传动,2011,35(1):59-61.。
1、将三维模型导出成parasolid格式,在adams中导入parasolid格式的模型,并进行保存。
2、检查并修改系统的设置,主要检查单位制和重力加速度。
3、修改零件名称(能极大地方便后续操作)、材料和颜色.首先在模型界面,使用线框图来修改零件名称和材料。
然后,使用view part only来修改零件的颜色。
4、添加运动副和驱动.注意:1)添加运动副时,要留意构件的选择顺序,是第一个构件相对于第二个构件运动。
2)对于要添加驱动的运动副,当使用垂直于网格来确定运动副的方向时,一定要注意视图定向是否对,使用右手法则进行判断。
若视图定向错了,运动方向就错了,驱动函数要取负。
3)添加运动副时,应尽量使用零件的质心点,此时也应检查零件的质心点是否在其中心。
4)因为在仿真中经常要修改驱动函数,所以应为驱动取一个有意义的名称,一般旋转驱动取为:零件名称_MR1,平移驱动取为:零件名称_MT1。
5)运动副数目很多,且后面用的比较少,所以运动副的名称可以不做修改。
对于要添加驱动的运动副,在添加运动副后,应马上添加驱动,以免搞错.6)添加完运动副和驱动后,应对其进行检查。
使用数据库导航器检查运动副和驱动的名称、类型和数量,使用verify model检查自由度的数目,此时要逐个零件进行自由度的检查和计算。
7)进行初步仿真,再次对之前的工作进行验证。
因为添加了材料,有重力,但没有定义接触,此时模型会在重力的作用下下掉。
若没问题,则进行保存。
5、添加载荷.6、修改驱动函数.一般使用速度进行定义,旋转驱动记得加d。
7、仿真。
先进行静平衡计算,再进行动力学计算。
8、后处理。
具体步骤如下:1)新建图纸,选择data,添加曲线,修改legend。
一般需要线位移,线速度,垂直轮压和水平侧向力的曲线。
2)分析验证,判断仿真结果的正确性(变化规律是否对,关键数值是否对)。
3)截图保存,得出仿真分析结论.。
第32卷第5期2010年5月舰 船 科 学 技 术SH I P SC I E NCE AND TEC HNOLOGY Vo.l 32,No .5M ay ,2010基于ADAM S 并联机构摇摆台运动学和动力学仿真卢道华,万 展(江苏科技大学机械工程学院,江苏镇江212003)摘 要: 介绍了一种用于船舶辅机设备陆地性能测试的三自由度并联机构摇摆台。
主要模拟特定海况下横摇、纵摇和升沉运动,不但分析了该结构摇摆台的空间结构和空间运动姿态的位置解算,还应用机械系统动力学仿真分析软件A DAM S ,建立了虚拟样机模型,给出了一种基于ADAM S 的求解并联机构摇摆台运动学和动力学的方法,获得了有关运动学及动力学特性曲线,为船舶辅机摇摆台系统的设计、制造、创新和模拟运动作业提供了理论依据和主要参数。
关键词: 摇摆台;三自由度并联机构;ADAM S ;运动学;动力学中图分类号: T H 113 2文献标识码: A文章编号: 1672-7649(2010)05-0119-06DO I :10 3404/j issn 1672-7649 2010 05 030K ine m atics and dyna m ics si m ulation of parallel m echanis m motionplatfor m based on ADA M SLU Dao hua ,WAN Zhan(Schoo l o fM echan icalEng i n eering ,Jia ngsu Un i v ersity o f Sc i e nce and Technology ,Zheng jiang 212003,Chi n a)Abst ract : A k i n d o f 3 DOF para llelm echan is m m oti o n platfor m applied for perfo r m ance test o f sh i p aux iliar y fac ility on land w as i n troduced ;itm ai n ly si m ulated the m oti o n o f rolling ,pitch i n g and heav i n g in a particular ocean situati o n.Th is paper no t on l y analyzed the space structure and spatia l positi o n so l u tion of the platfor m ,but a lso used m echanic dyna m ic ana l y sis soft w are ADAM S to bu il d a v irtua l pr o totype of the platfor m ,gave t h e m ethods o f the so lv i n g the kine m atics and dyna m ics o f the platfor m of the parallel m echanis m s ,and got the k i n e m atics and dyna m ics characteristics curve .The v irtua lproto typ i n g m odel of the para lle lm echan is m prov i d ed the theoretic foundati o n and m a i n para m eters for the syste m desi g n ,producti o n,crea ti o n and app lication in experi m en.tK ey w ords : m oti o n platfor m ;3 DOF para ll e lm echan is m s ;ADAM S ;k i n e m a tics ;dyna m ics收稿日期:2009-10-11;修回日期:2009-11-17作者简介:卢道华(1963-),男,教授,主要从事柔性制造新技术、舰船多A gen t 技术、机电一体化新产品开发与系统工程及计算机测控技术等方面的研究工作。