遥操作机器人系统 遥控 遥微操作机器人 通用成分框架 通信软件 递阶遗传算法 逐符号检测 逆控制 迭代学习控制 迭代信息传递算法 返源规划 运行时间基础结构 运动补偿 运动模型 运动基座 运动估计 过载函数 过程神经元网络 边缘检测 辨识 载波间干扰 载波干扰功率比 轴承 软件无线电,仿真 软件接收机 轮廓跟踪 轮廓特征 轧机 跨层调度 跨层 跨国公司 跟踪障碍边界 足球机器人 超高速集线电路硬件描述语言 超短反馈 超混沌 超宽带 资质 资源调度 资源优化配置 贪婪算法 质点弹簧模型 贝叶斯动态模型 谐波检测 调度分析 调度 调制
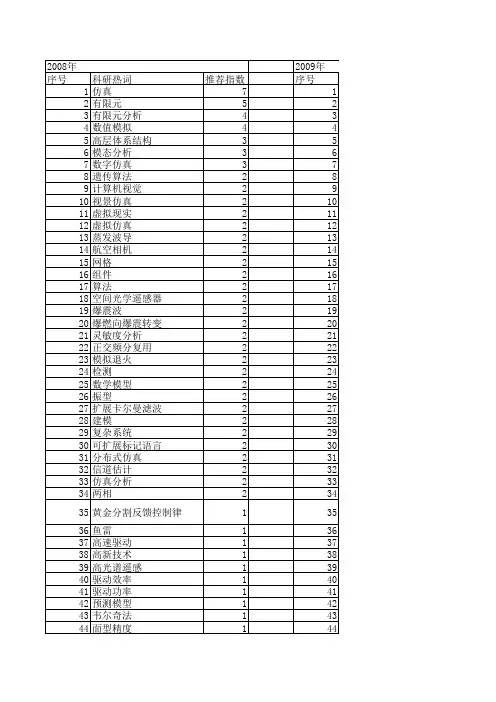
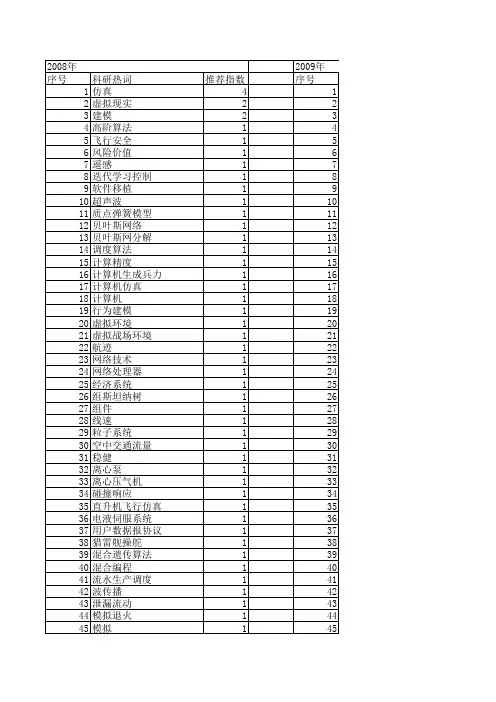
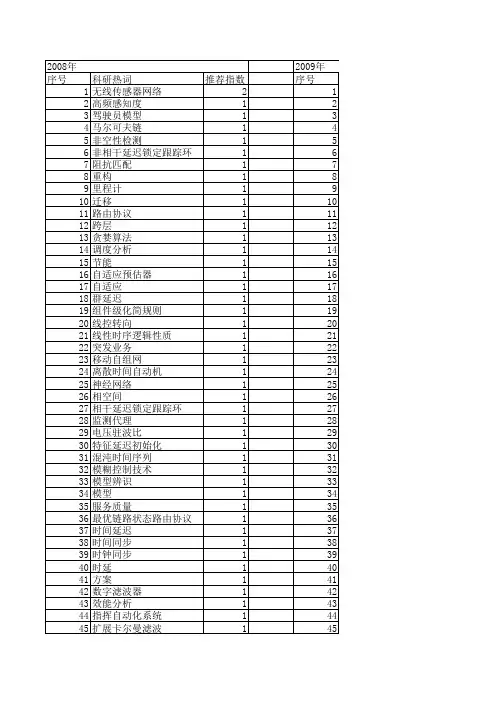
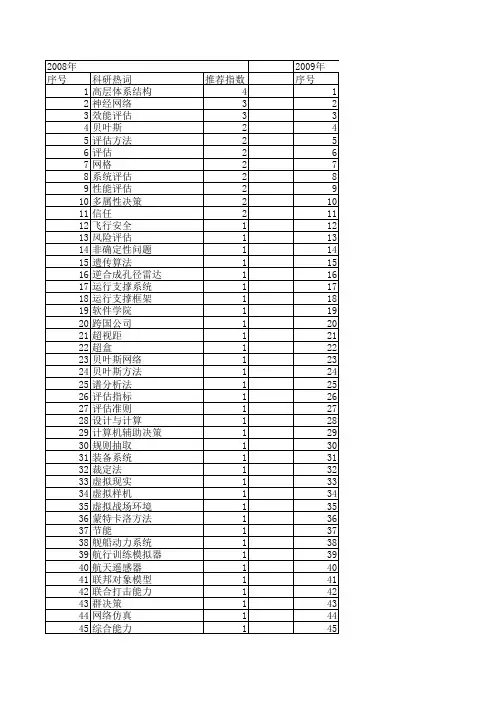
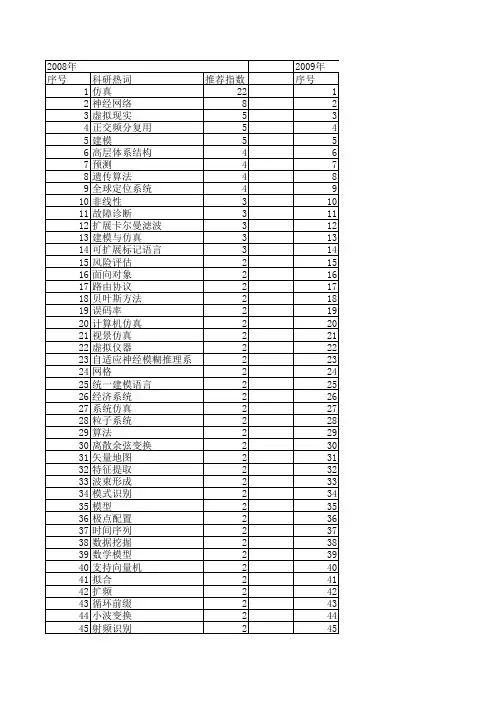
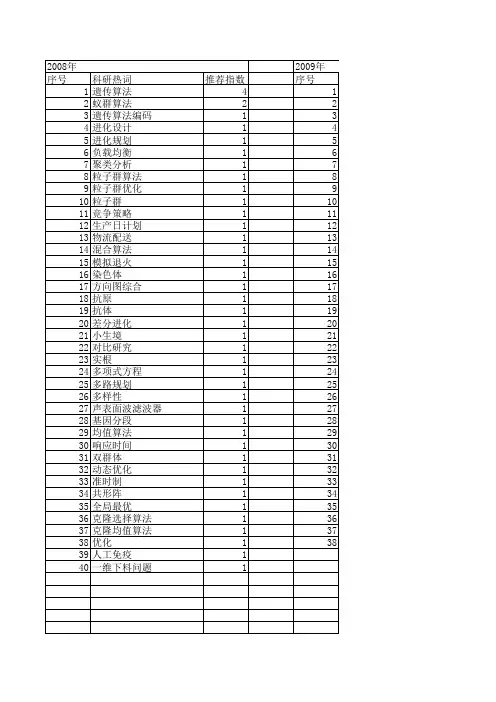
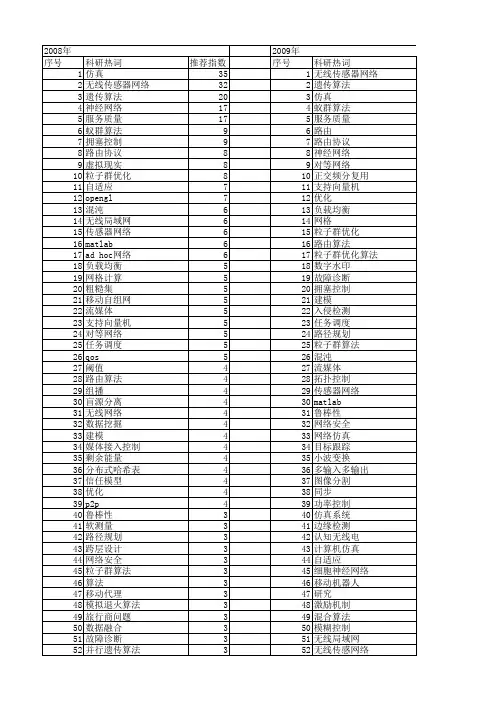
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 Байду номын сангаас5 36 37 38 39 40 41 42 43 44 45
46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92
2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92