索佳全站仪后交测量操作
- 格式:doc
- 大小:28.50 KB
- 文档页数:1
电子全站仪(30系列)操作手册适用型号:SET230R/R3 SET330R/R3 SET530R/R3 SET630R一、注意事项(2)1.第一次使用仪器前,应松开底座开关钮上的紧固螺母;2.禁止带三脚架一起搬动仪器;3.取电池前一定要关断电源;4.激光束不能对着人,有害,更不能从目镜去看;5.仪器每天用完入箱前,应取出电池。
`二、基本操作(5)1.基本键操作(5.1)·开关电源按{ON}:电源开;按住{ON}再按{灯}:电源关。
·开关屏幕按{灯},屏幕背景灯亮灭;按住{灯}直到滴滴响声,开关激光束。
·软键操作(软键指在屏幕底部的键)按{F1}-{F4},选择需要的软键;{FUNC}键用于在测量方式[MEAS]状态下的屏幕翻页(当多于4个软键时);·输入字母和数字{F1}-{F4}:输入分布在软键上的数字和字母;{FUNC}:翻页找你需要的字母、数字;(按住一会儿)回上页;连续按,往前翻。
{BS}:删除左侧字母数字;{ESC}:取消输入数据;{SFT}:选择的接收靶类型显示;{←}:(回车)接受输入的数据。
·选择键{▲}/{▼}:光标上下移动;{<}{>}:左右移动光标/其它选择;{←}: 确认选择;·模式转换[CNFG]:(软键)从主屏模式到设置(Configuration)模式;[MEAS]:从主屏模式到测量(Measure)模式;[MEM]:从主屏模式到存存储(Memory)模式;{ESC}:从各状态返回到主屏状态。
·其它操作{ESC}:返回上一屏。
2.屏幕功能距离:S:斜距;H:水平距;V:参考高度;竖向角度:ZA:天顶角(Z=0);VA:竖向角(H=0/H=±90);水平角度:按[R/L]转换状态:HAR:水平右转;HAL:水平左传;按[◢SHV],转换“S,ZA,H”,到“S,H,V”。
3.开机程序(9)开机后,仪器自检。
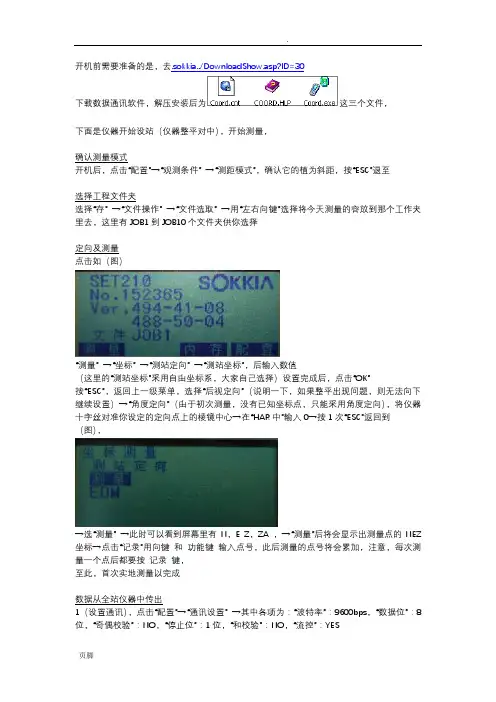
开机前需要准备的是,去.sokkia../DownloadShow.asp?ID=30下载数据通讯软件,解压安装后为这三个文件,下面是仪器开始设站(仪器整平对中),开始测量,确认测量模式开机后,点击“配置”→“观测条件”→“测距模式”,确认它的植为斜距,按“ESC”退至选择工程文件夹选择“存”→“文件操作”→“文件选取”→用“左右向键”选择将今天测量的容放到那个工作夹里去,这里有JOB1到JOB10个文件夹供你选择定向及测量点击如(图)“测量”→“坐标”→“测站定向”→“测站坐标”,后输入数值(这里的“测站坐标”采用自由坐标系,大家自己选择)设置完成后,点击“OK”按“ESC”,返回上一级菜单,选择“后视定向”(说明一下,如果整平出现问题,则无法向下继续设置)→“角度定向”(由于初次测量,没有已知坐标点,只能采用角度定向),将仪器十字丝对准你设定的定向点上的棱镜中心→在“HAR中”输入0→按1次“ESC”返回到(图),→选“测量”→此时可以看到屏幕里有N,E Z,ZA ,→“测量”后将会显示出测量点的NEZ 坐标→点击“记录”用向键和功能键输入点号,此后测量的点号将会累加,注意,每次测量一个点后都要按记录键,至此,首次实地测量以完成数据从全站仪器中传出1(设置通讯),点击“配置”→“通讯设置”→其中各项为:“波特率”:9600bps,“数据位”:8位,“奇偶校验”:NO,“停止位”:1位,“和校验”:NO,“流控”:YES(图)2同时将软件设置好,双击刚才三个文件中的最后一个Coord.exe点击要求这里的设置和刚才全站仪一样,需要大家注意,COM口的选择。
点击通讯,选择数据下载后出现现在开始继续设置全站仪(图)选择“存”→“文件操作”→“通讯输出”→用“向键”选择刚才你测量时将点放入的文件夹(从JOB1到JOB10)→按回车(此时该JOB后将出现OUT )(图)→“点击F4”→选择“SDR格式”(图)→按“回车键”选择此后软件就会有所反应JOB里的文件就传输出来了,点击转换,选择“转CSV格式“点击“文件“另存为得到类似EXCEL的文件,双击将起改为如下格式]注意这里的B,D,F列中的逗号,必须是在英文输入法时,输入的。
索佳S E T22D全站仪基本操作SET22D 全站仪坐标测量基本操作操作键一般功能:F1、F2、F3、F4⑥光标控制键。
基本操作:开机—→按键,进入状态选择屏幕—→(测量)、(内存)、CNFG(配置)按软件(F1~F4)和回车键进行以下操作:(注:以下涂黑者为选中的操作项)一.内存操作1.文件选取—→—→———→——→Job1——→选中,回车↙(Memory) 2.Known data 2. Job deletion Job23.Code 3. Comms out put Job32. 已知数据输入—→1.Job ———→——→ N(即X)—→—→(输入下一点)2. Comms input E(即Y) (Record)3.Code 3.Deletion Z(即高程)4.View Pt(点号)5.Clear3. 通讯设置——→—→1.Obs.condition——→Baud rete———→回车↙(Configure) 2.Instr.const Data bits:8 bits3.Data&time Parity:Not set (与计算机设置一致,其他不须变)Stop bit:1 bit5.Unit Check sum:No6.Key function Xon/Xoff:No4.通讯输出—→——→1. Job selection——→↙——→↙(选中文件,回车,执行数据输出)2.Known dat 2. Job deletion 2.Printed output3.Code二.水平角测量对中、整平(使用电子气泡),在“测量”状态下:盘左—→瞄准目标1—→、 (目标1水平方向读数为0°00′00″),记录;,记录;—→瞄准目标2—→读HAR,即为盘左半测回水平角β左盘右—→瞄准目标1—→、 (目标1水平方向读数为0°00′00″),记录;,记录;—→瞄准目标2—→读HAR,即为盘右半测回水平角β右、平均值,即为所观测水平角角度值。
1!!!!!使 用 说 明 书2!!!!!!!!!!!!!!使 用 说 明 书相关使用说明书y GYRO1X/2X/3X随机配备下列使用说明书:1.《GYRO1X/2X/3X自动全站式陀螺仪使用说明书》介绍自动全站式陀螺仪的操作方法。
2.《SRX系列电子全站仪使用说明书》介绍SRX系列电子全站仪的基本功能及其操作方法。
符号和约定 本说明书使用下列符号和约定::表示操作前应阅读的注意事项和重要内容。
:表示参阅章节的名称。
:表示补充说明。
:表示特别术语或操作的说明。
[软键]等 :表示屏幕显示的功能软键。
{按键}等 :表示操作面板上的按键。
相关说明 y除特别说明外,说明书中的“SRX”均表示“SRX1X/2X/3X”。
y除特别说明外,说明书的“GYRO X”均表示“GYRO1X/2X /3X”。
41.安全操作须知 (1)2.注意事项 (5)3.激光安全信息 (7)4.仪器部件名称 (9)4.1全站式陀螺仪的特点 (9)4.2仪器部件名称 (10)4.3模式结构图 (12)5.基本操作 (13)5.1按键基本功能 (13)6.电池充电 (15)7.测前准备和结束测量 (17)7.1仪器连接 (17)7.2陀螺测量前准备工作 (19)7.3陀螺程序启动与退出 (21)7.4结束陀螺测量 (23)8.真北方向测定 (24)8.1方位角显示 (25)8.2真北方向测定 (26)9.仪器常数测定 (33)10.错误信息 (38)11.故障处理 (39)11.1更换保险丝 (40)512.仪器检查 (41)12.1悬挂带检查 (42)12.2检查模式 (42)13.标准配置 (45)14.技术指标 (47)15.规范 (49)16.附录:陀螺仪原理 (50)61.为确保安全操作,避免造成人身伤害或财产损失,本说明书使用“警告”或“注意”来提示应遵循的条款。
在阅读本说明书主要内容之前,请首先弄清这些提示的含义。
提示含义本符号用于需特别注意条款的提示,有关细节说明随符号给出。
全站仪测量步骤及方法全站仪是一种高精度的测量仪器,主要用于测量地面的高程、水平角度和方位角等参数。
全站仪的使用方法和测量步骤如下:1.设置仪器:在使用全站仪前,首先要选择一个平稳的地方放置仪器,尽量远离电磁干扰源。
然后使用水平仪调平仪器,确保其水平。
接下来,设置仪器参考点,可以选择一个固定的地面点作为参考点,然后在仪器上设置该点的高程为0。
2.设置目标点:在进行测量前,需要确定目标点的位置。
可以使用棱镜或反射镜作为目标点,将其放置在测量的位置上,并确保其稳定。
3.执行测量:首先,使用望远镜对准目标点。
用转盘确定水平角度,按下水平角度读数按钮,记录水平角度值。
然后,使用侧面的粗调按钮将望远镜对准目标点的中心,按下测距按钮,记录测距值。
最后,使用转盘确定方位角,并记录方位角度值。
4.数据处理:将测量得到的数据输入到计算机中,可以使用专业的测量软件进行数据处理。
根据测量结果计算目标点的高程、水平角度和方位角。
可以将数据保存为文档或导出为其他格式。
全站仪的测量方法有以下几种常用的测量方式:1.三角测量法:该方法适用于短距离的地面测量。
首先,在目标点和仪器位置之间设置两个辅助点,然后使用全站仪进行辅助点和目标点之间的视线测量,根据三角形的几何关系计算目标点的坐标等参数。
2.链测法:该方法适用于长距离的地面测量。
在测量中,将目标点和仪器位置之间设置多个测量点,使用全站仪对各个测量点进行水平角度和距离的测量,然后根据链测原理计算目标点的坐标等参数。
3.多边形闭合测量法:该方法适用于地形复杂的地区。
在测量中,将目标点和仪器位置之间设置多个测量点,通过全站仪对各个测量点之间的角度和距离进行测量,然后根据多边形测量原理计算目标点的坐标等参数。
4.GPS辅助测量法:该方法结合全球定位系统(GPS)进行测量,适用于需要测量大范围区域的地面测量。
在测量中,先使用GPS确定目标点和仪器位置的大致坐标,然后使用全站仪对目标点周围的细节进行测量,最后结合GPS的定位结果得到更精确的测量结果。
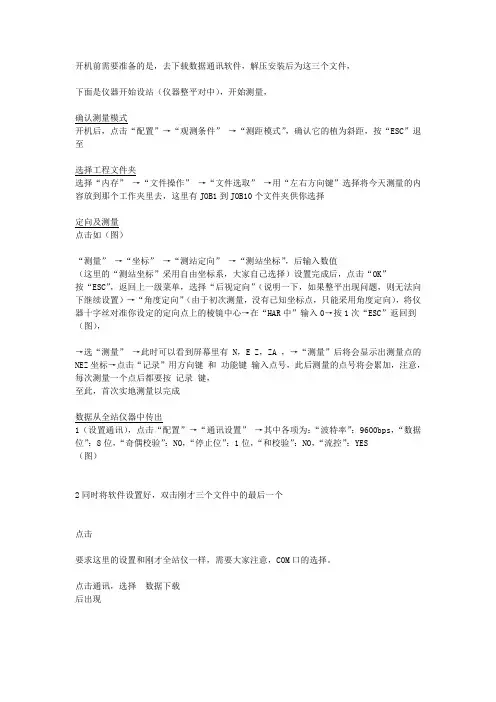
开机前需要准备的是,去下载数据通讯软件,解压安装后为这三个文件,下面是仪器开始设站(仪器整平对中),开始测量,确认测量模式开机后,点击“配置”→“观测条件”→“测距模式”,确认它的植为斜距,按“ESC”退至选择工程文件夹选择“内存”→“文件操作”→“文件选取”→用“左右方向键”选择将今天测量的内容放到那个工作夹里去,这里有JOB1到JOB10个文件夹供你选择定向及测量点击如(图)“测量”→“坐标”→“测站定向”→“测站坐标”,后输入数值(这里的“测站坐标”采用自由坐标系,大家自己选择)设置完成后,点击“OK”按“ESC”,返回上一级菜单,选择“后视定向”(说明一下,如果整平出现问题,则无法向下继续设置)→“角度定向”(由于初次测量,没有已知坐标点,只能采用角度定向),将仪器十字丝对准你设定的定向点上的棱镜中心→在“HAR中”输入0→按1次“ESC”返回到(图),→选“测量”→此时可以看到屏幕里有N,E Z,ZA ,→“测量”后将会显示出测量点的NEZ坐标→点击“记录”用方向键和功能键输入点号,此后测量的点号将会累加,注意,每次测量一个点后都要按记录键,至此,首次实地测量以完成数据从全站仪器中传出1(设置通讯),点击“配置”→“通讯设置”→其中各项为:“波特率”:9600bps,“数据位”:8位,“奇偶校验”:NO,“停止位”:1位,“和校验”:NO,“流控”:YES(图)2同时将软件设置好,双击刚才三个文件中的最后一个点击要求这里的设置和刚才全站仪一样,需要大家注意,COM口的选择。
点击通讯,选择数据下载后出现现在开始继续设置全站仪(图)选择“内存”→“文件操作”→“通讯输出”→用“方向键”选择刚才你测量时将点放入的文件夹(从JOB1到JOB10)→按回车(此时该JOB后将出现OUT )(图)→“点击F4”→选择“SDR格式”(图)→按“回车键”选择此后软件就会有所反应JOB里的文件就传输出来了,点击转换,选择“转CSV格式“点击“文件“另存为得到类似EXCEL的文件,双击将起改为如下格式]注意这里的 B,D,F列中的逗号,必须是在英文输入法时,输入的。
全站仪操作步骤
一、全站仪架已知导线点(L2)上,对中整平,并后视另一架在已知导线点(L1)对中杆上的棱镜。
1、进入P2,放样F3
2、进入S-O:4. Set h angle 按回车键进入
3、后视F1,进入S-O/Ang,输入
仪器站点(L2)NO:X坐标,
EO:Y坐标
后视点(L1)NBS:X坐标,
EBS:Y坐标
4、输入后对镜头对准后视点(L1)上的棱镜,按Yes键,再按回车键。
二、测量另一导线点(L3)的坐标。
(如何测量点的坐标)
5、进入P2,坐标F2
6、进入Coord:1.obserratior, 按回车键
7、等待2-3秒,仪器自动显示Coord: N:X坐标,
E:Y坐标
8、将测得的数据(L3点的坐标)记录即可。
三、放点位L3(或桩位)。
(根据已知坐标,如何放出点位)
5、进入P2,放样F3
6、进入S-O:2. S-Odata, 按回车键进入
7、输入L3的坐标,按OK键
8、按F3键(左右方向),将方向调节归零,对中杆棱镜根据仪器
所指的方向对中,对中后通知仪器测距(一定要是测平距),直至所测平距在5mm以内,然后打桩订钉完成放点工作。
9、再重复上述步骤可放出L4、L5的点位。
电子全站仪(30系列)操作手册适用型号:SET230R/R3 SET330R/R3 SET530R/R3 SET630R一、注意事项(2)1.第一次使用仪器前,应松开底座开关钮上的紧固螺母;2.禁止带三脚架一起搬动仪器;3.取电池前一定要关断电源;4.激光束不能对着人,有害,更不能从目镜去看;5.仪器每天用完入箱前,应取出电池。
`二、基本操作(5)1.基本键操作(5.1)·开关电源按{ON}:电源开;按住{ON}再按{灯}:电源关。
·开关屏幕按{灯},屏幕背景灯亮灭;按住{灯}直到滴滴响声,开关激光束。
·软键操作(软键指在屏幕内底部的键)按{F1}-{F4},选择需要的软键;{FUNC}键用于在测量方式[MEAS]状态下的屏幕翻页(当多于4个软键时);·输入字母和数字{F1}-{F4}:输入分布在软键上的数字和字母;{FUNC}:翻页找你需要的字母、数字;(按住一会儿)回上页;连续按,往前翻。
{BS}:删除左侧字母数字;{ESC}:取消输入数据;{SFT}:选择的接收靶类型显示;{←}:(回车)接受输入的数据。
·选择键{▲}/{▼}:光标上下移动;{<}{>}:左右移动光标/其它选择;{←}: 确认选择;·模式转换[CNFG]:(软键)从主屏模式到设置(Configuration)模式;[MEAS]:从主屏模式到测量(Measure)模式;[MEM]:从主屏模式到内存存储(Memory)模式;{ESC}:从各状态返回到主屏状态。
·其它操作{ESC}:返回上一屏。
2.屏幕功能距离:S:斜距;H:水平距;V:参考高度;竖向角度:ZA:天顶角(Z=0);VA:竖向角(H=0/H=±90);水平角度:按[R/L]转换状态:HAR:水平右转;HAL:水平左传;按[◢SHV],转换“S,ZA,H”,到“S,H,V”。
3.开机程序(9)开机后,仪器自检。
全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
索佳SET600全站仪简易操作流程一,测量(坐标测量)将仪器对中整平,按“ON”键开机→按“ESC”,直到屏幕出现“0 set”界面,把仪器绕水平方向转动一圈,再把望远镜绕垂直方向转动一圈(此步为角度初始化,每次开机都要执行此步),当水平角(HAR)和垂直角(ZA)都在屏幕上出现后(测量界面),按“ESC”键→F3(内存)→选择“JOB”(工作文件),按“确认”(面板右下角的灰色键)→选择“JOB name edit”(文件名编辑),按“确认”→按F1至F4(FUNC为键盘输入内容的扩展,包括数字,字母和符号)输入文件名,输入完毕按“确认”→ESC(退出) →ESC→ESC→依次按FUNC(功能),当F3上方显示“坐标”时(如果不考虑坐标数据的存储及调用,可跳过建立文件名的步骤,当角度初始化完毕后,按FUNC调整F3的功能为坐标时再进行以下操作)→F3(坐标)→选择“Stn.Orientation”(测站定向),按“确认”→选择“stn coordinate”(测站坐标),按“确认”→F3(编辑),按F1至F4输入测站坐标(N0为纵坐标,E0为横坐标,Z0为高程),一行输入完毕,按“确认”当光标跳至Inst.h 时,输入仪器高,光标跳至Tgt.h时为棱镜高,全部输入完毕→按F2(记录),在Pt处输入测站点号(F4为编辑修改),按F1(OK)(当出现Over write的提示时,说明在仪器内存中有点名相重的点,要么按F4覆盖,要么按F3重新修改点名)→(如果不考虑数据记录及调用,可跳过上一步)F4(OK)→选择“Set H angle”(设置水平角),按“确认”→选择“Back sight”(后视),按“确认”→F3(编辑)→依次输入后视坐标(输入法参考测站定向,NBS 为纵坐标,EBS为横坐标,ZBS为高程)→F4(OK)→F4(OK) →精确瞄准后视点,按F4(YES)→ESC→选择“Observation”(观测),按“确认”→等待测距完毕,屏幕出现目标点坐标时后,按F4(记录)→F1(OK)记录目标点坐标(如需更改点号及棱镜高,可把光标调至Pt(点号)行和Tgt.h(棱镜高)行并按F4键修改)→观测下一点,按F1(观测)即可!!二,放样(坐标放样)开机及角度初始化完毕(方法同上),按“ESC”进入测量界面(屏幕有水平角及垂直角显示),依次按“FUNC”,直到F2功能变为“放样”→按F2(放样)→选择“Stn.Orientation”(测站定向),按“确认”→选择“stn coordinate”(测站坐标),按“确认”→F3(编辑),按F1至F4输入测站坐标一行输入完毕,按“确认”当光标跳至Inst.h时,输入仪器高,光标跳至Tgt.h时为棱镜高,全部输入完毕→按F2(记录),在Pt处输入测站点号(F4为编辑修改),按F1(OK)(当出现Over write的提示时,说明在仪器内存中有点名相重的点,要么按F4覆盖,要么按F3重新修改点名)→(如果不考虑数据记录及调用,可跳过上一步)F4(OK)→选择“Set H angle”(设置水平角),按“确认”→选择“Back sight”(后视),按“确认”→F3(编辑)→依次输入后视坐标(输入法参考测站定向,NBS为纵坐标,EBS为横坐标,ZBS 为高程)→F4(OK)→F4(OK) →精确瞄准后视点,按F4(YES)→ESC→选择“S-O date”(放样数据),按“确认”→依次按F2(▲S-O),直到屏幕出现“S-OCoord(放样数据),则输入放样点的坐标(Np,Ep,Zp分别为纵坐标,横坐标,高程)→F4(OK)→依次按F2(▲S-O),直到屏幕出现S-O H界面时,dHA显示的即为角度差,水平方向转动仪器,将该角度差调为00°00′00″,锁紧水平制动,则仪器所指示的水平方向即为放样点所在的方向,当指挥跑尺人员将棱镜调整至此方向后,通过F1(观测)键,即可知道放样距离差(屏幕上以H显示)为多少!!※温馨提示:一,依次按ESC键进入SET600界面,F3(内存)→选择JOB,在Comms setup中可以进行通讯参数的设置(与南方cass 通讯,在cass里选择索佳SET,全站仪推荐一下设置Baud rate:9600bpsDate bits:8bitParity:NOT setStop bit:1bitCheck sum:NoXon/Xoff:NOCass及全站仪通讯参数设置好后,进入JOB里,选择Comms output→选择所要通讯的文件→按“确认”键,但文件名右边变为Out后,→F4(OK)→选择SDR→按“确认”键即可!!三鼎全站仪常用程序简易流程一,使用中的相关注意事项:1,仪器对中整平后,请检查补偿器是否打开(一般为开启状态)——开机后的常用测量界面,按两次F4键→F2(补偿)→选择对应的补偿类型即可开启2,反射体(棱镜,棱镜常数,无棱镜),气象改正数的设置——测量之前,在开机后的常用测量界面,按F4键,找到EDM选项,在此选项中,可对棱镜和气象改正数进行设置(注意:在使用带免棱镜功能的全站仪时,一定要在EDM里选择好对应的反射体,即目标是棱镜还是无棱镜)以上为初次使用全站仪的用户需要特别注意的事项,以下就三鼎全站仪中的两个常用功能——测量(数据采集)和放样作一个简要的流程描述二,测量(数据采集)*温馨提示:在操作中,输入数字或字母完毕,按ENT键确认输入。
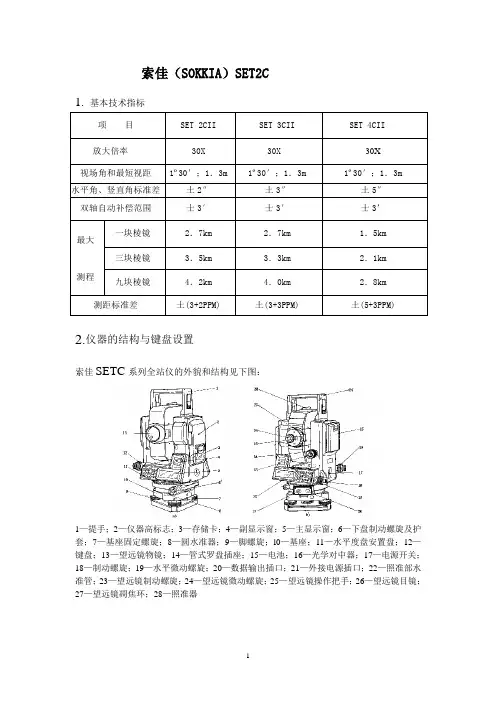
索佳(SOKKIA)SET2C1.基本技术指标项目SET 2CII SET 3CII SET 4CII放大倍率30X30X30X 视场角和最短视距1º30′;1.3m1º30′;1.3m1º30′;1.3m 水平角、竖直角标准差土2″土3″土5″双轴自动补偿范围士3′士3′士3’最大一块棱镜2.7km2.7km1.5km测程三块棱镜3.5km3.3km2.1km 九块棱镜4.2km4.0km2.8km测距标准差土(3+2PPM)土(3+3PPM)土(5+3PPM)2.仪器的结构与键盘设置索佳SETC系列全站仪的外貌和结构见下图:1—提手;2—仪器高标志;3—存储卡;4—副显示窗;5—主显示窗;6—下盘制动螺旋及护套;7—基座固定螺旋;8—圆水准器;9—脚螺旋;l0—基座;11—水平度盘安置盘;12—键盘;13—望远镜物镜;14—管式罗盘插座;15—电池;16—光学对中器;17—电源开关;18—制动螺旋;19—水平微动螺旋;20—数据输出插口;21—外接电源插口;22—照准部水准管;23—望远镜制动螺旋;24—望远镜微动螺旋;25—望远镜操作把手;26—望远镜目镜;27—望远镜凋焦环;28—照准器仪器键盘的主要功能见下表:仪器键盘的设置情况如下:3、SET2C全站仪的操作(一)测前的准备工作1.安装内部电池测前应检查内部电池的充电情况,如电力不足,要及时充电,充电时间需12~15小时,不要超出规定时间。
测时装上电池,测量结束应卸下。
2.2安置仪器仪器的安置包括对中和整平。
仪器装有尺寸较大的光学对中器,放大倍率为3倍,使用方便。
仪器设有双向倾斜补偿器,补偿范围为3,所以仪器整平后,气泡稍有偏离,对观测并无影响。
3.开机并设置水平与竖直度盘指标开机后仪器自动进入自检,通过后显示电池电力情况,之后即可设置水平与竖直度盘指标。
将仪器照准部旋转一周,听到鸣响即显示水平角,然后将望远镜竖直旋转,听到鸣响即显示竖直角,至此两项指标设置完毕。
工程型全站仪使 用 说 明 书1025821-02-AiM-50系列售后在线注册工程型全站仪使用说明书索佳符号约定 本说明书使用下列符号和约定::表示操作前应阅读的注意事项和重要内容。
:表示参阅章节及其名称。
:表示补充说明。
:表示特别术语或操作的说明。
[观测]等:表示所显示的软键内容。
{ESC }等:表示iM 操作面板上的按键。
<放样>等:表示显示界面名称。
本说明书约定 ·除特殊说明外,说明书中的“iM ”表示iM-50。
·说明书中所用显示界面均来自标准型双面键盘的iM 仪器。
·说明书中采用的均是基于“距离最小显示”设为“1mm ”时的界面,若设为“0.1mm ”时,显示的距离值和气象改正输入值将增加一个小数位。
“33.仪器参数设置”·在阅读各测量操作章节之前,请先阅读“4.仪器部件名称”和“5.基本操作”的内容以了解仪器的基本操作方法。
·有关选项的选取和数据输入的方法请参阅“5.1键盘操作”。
·说明书中介绍的操作程序均基于“重复测量”模式,选取其他测量模式时的操作程序信息将随给出。
· 表示不是所有产品都具有的功能或选项,如需了解产品有关细节可向索佳客服中心咨询。
·KODAK 为柯达公司注册商标。
·说明书中出现的其他公司或产品名称均为相应公司注册商标。
5678910为确保产品的安全使用,避免造成人身伤害和财产损失,本说明书使用“警告”或“注意”来提示操作仪器时应遵循的条款。
在阅读本说明书主要内容之前,请了解这些提示的具体含义。
提示约定此符号用于需特别注意条款的提示,细节说明随符号给出。
此符号用于禁止条款的提示,细节说明随符号给出。
此符号用于必须执行条款的提示,细节说明随符号给出。
2.注意事项2.注意事项根据IEC 国际标准,iM属下列等级激光产品和LED 产品。
·EDM 装置:无棱镜 3R 级激光产品 棱镜、反射片 1级激光产品 激光照准指示 3R 级激光产品 ·对中激光器( ): 2级激光产品·EDM 测距装置在无棱镜测距时为3R 级激光产品,在棱镜或反射片测距时为1级激光产品。
全站仪操作流程
1、采点流程:
第一步:架好仪器;将仪器架设在P点,按ON/OFF开机对中整平,
第二步:照准后视点A1,将后视归零,归零操作按F6(MEAS)——F5(HZO)——F4确定,归零结束,按F2测后视点A1坐标并记录后视点坐标(EA东 NOR北 ELEV高),按F3保存,
第三步:将仪器对准A2测点A2坐标并记录点A2坐标(EA东 NOR 北 ELEV高)
第四步:连续按F5两下,就可得测站点P的坐标(EA东 NOR北ELEV高)
第五步:将仪器架设在A1点,对中整平,
第六步:按F5----F4分别输入A1和P点的坐标,照准P点进行校核,如果满足要求再测A2点的坐标并于前一次测的坐标做对比,如果两个坐标相差的差值在精度范围内(毫米以内)则采点结束
2、坐标放样流程:
第一步:按F5-----F4输入测站点P和后视点A1的坐标,然后对准后视点进行校核,若校核无误,则将其进行保存(F3)按两次F3回到主界面
第二步:回到主界面时,按1进行坐标放样,再按F1输入放样点坐标并按F3保存再按F5,仪器就会自动找到放样点。
全站仪后方交会法的具体操作步骤
开机后先按S.O 键,输入文件名(也可跳过),确定,再按S.O 键下翻,F2 键选择新点,再按F2 选择后方交会法,再选择一个文件,确定,自定义点名(可跳过),再F1 距离后方交会,输入仪高,确定,在No1#界面里面选择坐标,输入第一个已知点的坐标,在已知点上架好凌镜,测量,再用同样的方法进行第二个点的操作。
然后再看残差大不大,不大可以进行计算,后面的就进行定位放线。
以南方全站仪为例: 放样---新点----后方交会法----输入点号---回车----输入仪高---回车---输入A 点已知坐标-----输入棱镜高---测量距离---自动保存-----输入B 点坐标---输入棱高----测量距离----自动保存----计算----记录---(完成) 说的挺多,其实挺简单的,你可以上网下一本说明书,说明书里说的很祥细.网上有很多的.希望对你有帮助. 全站仪后方交会的操作方法请告诉我全站仪后方交会法跟极坐标法的原理是一样的,都要有两个已知条件。
极坐标法有两个已知坐标或者一个坐标一个方向就可以了,后方交汇要有两个坐标。
步骤:在仪器里面找到后方交汇,有的叫交会测量,有的叫新点。
每个仪器不同都不一样。
有的一起要输入两个坐标后在测距,有的是输一个测一个。
反正就是输入坐标,然后测距,然后按计算,定向就可以了,后交有条件限制的。
交会角度不能小于15 度和大于165 度、
更不能再一条直线上。
要不然仪器就不能计算出结果。
无法交会。
对交会距离也有一定限制,得慢慢摸索,总之比极坐标法好用但是精度差点,可以交会2 个坐标,也可以交会很多坐标。
坐标都精度高。
全站仪后方交会测量步骤,牵着你的小手一个一个键按!小编这次给大家带来的是全站仪后方交会的测量步骤与一些需要注意的方面,简单易懂的口语化,让您理解起来更加得心应手。
首先介绍下全站仪后方交会的原理,仅在待定点上设站,向三个已知控制点观测两个水平夹角a、b,从而计算待定点的坐标。
全站仪后方交会测量步骤前提,已知两个点位坐标A、B1.在已知两个点位坐标之间呈现一个三角形架设全站仪(要求:能通视,角度不宜小于15度,也不要大于165度)过大过小都会影响误差超过要求,而不能使用2.点击电源“开关”开机,对中整平水准气泡。
3.选择“新建项目”,名称一般以日期命名。
4.选择“建站”,选择“后方交会测量”。
5.点击“测量”,输入“点名”,输入已知点位坐标A,输入“镜高”。
6.照准已知点位坐标A棱镜中心,点击“测角测距”。
点击完成。
7.点击“测量”。
输入“点名”,输入已知点位坐标B,输入“镜高”。
8.照准已知点位坐标B棱镜中心,点击“测角测距”,点击完成。
9.根据所测数据点击“计算”,得到待定点坐标,用于建站。
下面我们来看一个实例题更加便于理解已知点位坐标M、N,而全站仪架设在点O,求测出点ABC的点位坐标。
1.先通过后方交会法把O点全站仪架设的点位坐标测出,然后逐渐通过后方交会法把其他点位坐标测出。
(要注意度数的要求哦!)2.也可以先通过后方交会法测出O点点位坐标后,算出方位角,通过方位角逐渐得到点ABC的点位坐标。
(1)方位角的计算公式aretan((y2-y1)/(x2-x1)),结果可以用Excel进行转换为度数。
(2)特别需要注意的是当x2-x1>0、y2-y1>0时,在第一象限,计算出来的就是结果。
x2-x1<0、y2-y1≥0时,在第二象限,计算出来的结果要-180°。
x2-x1<0、y2-y1<0时,在第三象限,计算出来的结果要+180°。
x2-x1>0、y2-y1<0时,在第四象限,计算出来的结果要-360°。
全站仪后方交会法步骤和高程测量步骤全站仪是一种常用于测量地面高程和水平角度的仪器。
在工程测量中,经常会使用全站仪后方交会法进行高程测量。
下面将详细介绍全站仪后方交会法的步骤和高程测量的步骤。
1.设置仪器:首先,需要选择一个适合的测量点作为基准点,并将全站仪放置在基准点上。
将全站仪水平放置,并通过调整三个螺丝调整水平仪气泡位于中心位置。
然后,使用全站仪的目标板对准基准点。
2.测量目标点:使用全站仪的望远镜和交会杆,在目标点上设置目标板。
目标板上的标识点应与全站仪的十字线对齐。
准确平稳地在目标点上设置目标板。
3.观测目标点:通过调整全站仪的望远镜,使其对准目标板上的标识点。
在读数之前,要确保全站仪已经稳定下来。
然后,记录望远镜的水平角和垂直角的读数。
4.移动到下一个目标点:移动全站仪到下一个目标点,并重复步骤2和步骤3、在每次观测之间,全站仪应保持在基准点上,并使用目标板进行校准。
5.数据处理:利用观测到的水平角和垂直角的读数,可以计算出各个目标点之间的坐标和高程差。
这种计算可以使用后方交会法进行,根据目标点在水平方向和垂直方向上的角度差,以及目标点之间的距离差,推导出目标点的空间坐标。
高程测量步骤如下:1.设置起始点:选择一个起始点作为基准点。
全站仪被放置在基准点上,并确保仪器水平放置。
2.目标点设置:将目标板设置在需要测量高程的点上。
目标板上的标识点应与全站仪的十字线对齐。
3.观测目标点:调整全站仪的望远镜,使其对准目标板上的标识点。
在记录读数之前,要确保全站仪稳定下来。
然后,记录望远镜的垂直角的读数。
4.移动到下一个目标点:移动全站仪到下一个需要测量高程的点,并重复步骤2和步骤35.高程差计算:根据每个目标点的垂直角的读数,可以计算出不同目标点之间的高程差。
通过将起始点的高程与每个目标点的高程差相加,可以得到每个目标点的实际高程。
6.数据处理:将所有测量得到的目标点的实际高程整理并记录。
进行必要的校正和调整,以获得更准确的高程数据。
电子全站仪(30系列)操作手册适用型号:SET230R/R3 SET330R/R3 SET530R/R3 SET630R一、注意事项(2)1.第一次使用仪器前,应松开底座开关钮上的紧固螺母;2.禁止带三脚架一起搬动仪器;3.取电池前一定要关断电源;4.激光束不能对着人,有害,更不能从目镜去看;5.仪器每天用完入箱前,应取出电池。
`二、基本操作(5)1.基本键操作(5.1)·开关电源按{ON}:电源开;按住{ON}再按{灯}:电源关。
·开关屏幕按{灯},屏幕背景灯亮灭;按住{灯}直到滴滴响声,开关激光束。
·软键操作(软键指在屏幕内底部的键)按{F1}-{F4},选择需要的软键;{FUNC}键用于在测量方式[MEAS]状态下的屏幕翻页(当多于4个软键时);·输入字母和数字{F1}-{F4}:输入分布在软键上的数字和字母;{FUNC}:翻页找你需要的字母、数字;(按住一会儿)回上页;连续按,往前翻。
{BS}:删除左侧字母数字;{ESC}:取消输入数据;{SFT}:选择的接收靶类型显示;{←}:(回车)接受输入的数据。
·选择键{▲}/{▼}:光标上下移动;{<}{>}:左右移动光标/其它选择;{←}: 确认选择;·模式转换[CNFG]:(软键)从主屏模式到设置(Configuration)模式;[MEAS]:从主屏模式到测量(Measure)模式;[MEM]:从主屏模式到内存存储(Memory)模式;{ESC}:从各状态返回到主屏状态。
·其它操作{ESC}:返回上一屏。
2.屏幕功能距离:S:斜距;H:水平距;V:参考高度;竖向角度:ZA:天顶角(Z=0);VA:竖向角(H=0/H=±90);水平角度:按[R/L]转换状态:HAR:水平右转;HAL:水平左传;按[◢SHV],转换“S,ZA,H”,到“S,H,V”。
3.开机程序(9)开机后,仪器自检。
后交测量设站操作方法
---------索佳SET630R全站仪
一、选择对观测目标(包括后视基准点、目标点)通视良好并且全安
的地点架设仪器。
二、开机,外界光线暗时按照明键(灯标志)照明键盘。
三、按[ESC]键进入测量菜单界面,按[FUNC]键至P2页,按[倾斜]
键使屏幕显示电子气泡,据此调平仪器,调平完成后按[ESC]键返回至上一页。
四、按[EDM]键设置后交测量的目标模式(采用莱卡梭镜时,大梭
镜常数为:-30,小梭镜常数为:-15),气象参数只需每一季节检查一次气象变化,按[ESC]键进入主菜单屏幕(屏底显示[测量]、[内存]、[配置],依次按[内存]、[已知坐标]、[键盘输入],输入后视已知点坐标,按[↓]确定输入。
键功能说明:[FUNC]键为屏幕显示翻页;[ESC]键为取消(或返回)。
五、依次按[菜单]、[后交测量]、[交会坐标],进入交会点选择屏幕,
按[调取]选择已存入的点,在此屏幕中输入目标棱镜高,按[→]键选择下一个目标点,目标点至少2个。
目标点选择完成后按[测量]键开始后交测量。
六、依次瞄准目标点(棱镜中心)后按[测距]、[YES],此时注意检
查梭镜高数值,后交测量结束后,仪器显示测站点的三维坐标及其标准差,此时不准转动仪器(否则将重新操作),仪器将以现在的方向定向,偏差满足要求时依次按[OK]、[YES],至此后交设站完成,按[ESC]键返回到测量菜单。
偏差超限时按[显示]进入目标点重测或增加目标点。
七、后交设站完成后,必须复测已知点对比已知坐标数据复核。