线性代数-基变换与坐标变换
- 格式:ppt
- 大小:202.50 KB
- 文档页数:20
基变换与坐标变换的关系与应用基变换和坐标变换是线性代数中的重要概念,它们之间存在一定的关系,并且在许多领域中有广泛的应用。
本文将探讨基变换和坐标变换的关系以及它们在实际应用中的应用案例。
1. 基变换与坐标变换的概念在线性代数中,基是向量空间中一组线性无关的向量。
基变换是将一个向量空间的基转换为另一个基的过程。
而坐标是描述向量在某个基下的表示方式。
坐标变换是从一个基的坐标系转换到另一个基的坐标系的过程。
可以说基变换是在向量空间中改变基的方向和大小,而坐标变换是在坐标系中改变坐标的表示。
2. 基变换与坐标变换的关系基变换和坐标变换之间存在紧密的联系。
考虑一个向量在一个基下的坐标表示,如果我们将该基进行变换,那么基相应的坐标系也会发生变化。
而坐标变换是基变换的结果,通过基变换,我们可以得到向量在新基下的坐标表示。
换句话说,基变换决定了坐标变换的方式。
3. 基变换与坐标变换的应用基变换和坐标变换在许多科学领域中有广泛的应用。
3.1 三维坐标变换在三维计算机图形学和计算机视觉中,我们经常需要对三维空间中的对象进行坐标变换。
通过基变换和坐标变换,我们可以将对象从世界坐标系转换到相机坐标系或者屏幕坐标系。
这样可以实现对象在三维空间中的旋转、缩放和平移等操作。
3.2 坐标系的正交化在机器学习领域中,正交化是一个常见的操作。
通过对数据进行基变换,可以将原始数据映射到一个正交基的坐标系中,从而方便进行数据分析和处理。
例如,在主成分分析(PCA)中,我们通过基变换将数据投影到一个新的基上,实现数据的降维和特征提取。
3.3 图像处理中的颜色空间转换在图像处理中,颜色空间的转换是一个重要的任务。
基于RGB颜色模型的图像可以通过基变换和坐标变换转换到其他颜色空间,如HSV、Lab等。
这样可以方便地实现图像的亮度、饱和度和色彩的调整。
3.4 机器人运动规划中的坐标变换在机器人运动规划中,坐标变换是一个关键的步骤。
通过基变换,可以将机器人末端执行器的位置和姿态从机器人局部坐标系转换到全局坐标系,从而方便进行运动轨迹的规划和控制。
基变换与坐标变换的理解在线性代数的学习过程中,我们经常会遇到基变换和坐标变换的概念。
这两个概念是线性代数中非常重要的概念,对于理解矩阵变换和向量空间变换起着至关重要的作用。
基变换的概念和意义在向量空间中,基是一个线性无关且张成整个向量空间的向量集合。
基变换指的是由一个基向量集合变换为另一个基向量集合的过程。
当我们进行基变换时,实际上是在改变向量表示的方式,但是向量本身不会发生变化。
基变换的本质是将原向量空间中的向量通过一种线性变换映射到一个新的基向量空间中,从而使得原空间中的向量在新的基下有着不同的坐标表示。
通过基变换,我们可以更加方便地对向量空间进行分析和处理。
在实际应用中,基变换也被广泛应用于图像处理、机器学习等领域。
例如,在计算机图形学中,基变换可以帮助我们更好地理解和描述图形的变化和转换。
坐标变换的概念和意义坐标变换是指在给定基的基础上,改变向量在这个基下的坐标表示的过程。
坐标变换实际上是一种基变换的特例,特别是当基是标准正交基时,坐标变换可以简化为矩阵乘法的形式。
通过坐标变换,我们可以将向量从一个坐标系表示转换为另一个坐标系表示,这在实际应用中具有重要意义。
在机器人学中,坐标变换可以帮助我们描述机器人在不同坐标系下的位置关系,从而控制机器人的运动。
在三维图形学中,坐标变换也是不可或缺的工具,可以帮助我们实现图形对象的平移、旋转等操作。
基变换与坐标变换的关系基变换和坐标变换之间有着密切的联系。
在实际应用中,基变换可以通过矩阵乘法来表示,而坐标变换也可以通过矩阵乘法来表示。
基变换和坐标变换的关系可以从几何和代数的角度进行理解。
从几何上看,基变换可以看作是一种向量空间的旋转、拉伸和压缩等操作,而坐标变换则是在这个基的基础上描述向量的位置关系的操作。
从代数的角度看,基变换可以看作是基向量的线性组合,坐标变换可以看作是向量在不同基向量下的系数表示。
通过矩阵的乘法运算,我们可以很方便地实现基变换和坐标变换的转换。
文档内容模板如下:基变换与坐标变换公式一、基变换概述基变换在数学和物理学中具有重要意义,它是描述向量空间中向量变换的一种数学工具。
基本思想是通过一组新的基底来表示原有的向量,从而实现向量空间中的变换。
二、基变换的原理假设有一组基底向量{a1, a2, …, an}和{b1, b2, …, bn},它们之间通过一个矩阵M相互转换。
则向量v可以表示为:v = a1x1 + a2x2 + … + anxn = b1y1 + b2y2 + … + bnyn其中xi和yi是向量v在{a1, a2, …, an}和{b1, b2, …, bn}基下的坐标。
三、坐标变换的概念坐标变换是指在不同基底下对同一个向量进行表示的变换过程。
假设有向量v在标准基底下的坐标为y,在基底{a1, a2, …, an}下的坐标为x。
则坐标变换关系为:x = My其中矩阵M由基底{a1, a2, …, an}确定。
四、基变换与坐标变换关系在基变换和坐标变换的过程中,两者之间有着密切的联系。
通过基变换矩阵M,可以实现向量之间在不同基底下的表示转换。
同时,坐标变换也可以通过基变换来实现。
假设有向量v,在基{a1, a2, …, an}和基{b1, b2, …, bn}下的坐标分别为x和y,则坐标变换公式为:y = Mx五、总结基变换和坐标变换是线性代数中重要的概念,它们为描述向量空间中的变换提供了有效的数学工具。
通过对基变换和坐标变换的学习,可以更好地理解向量在不同基底下的表示和转换过程。
以上是关于基变换与坐标变换公式的简要介绍,希望对你有所帮助。
线性代数中的基与维数线性代数是数学的一个分支,主要研究向量空间和线性映射的性质。
而在线性代数中,基与维数是两个重要的概念,它们扮演着关键的角色。
本文将详细讨论线性代数中的基与维数,并探讨它们的应用。
一、基与线性无关性在线性代数中,我们将向量空间中的一组向量称为基(basis),它们具有以下两个性质:1. 生成性:基中的向量可以通过线性组合生成向量空间中的任意向量。
2. 线性无关性:基中的向量不能通过线性组合得到零向量。
具体来说,设V是一个向量空间,若存在向量组B={v₁, v₂, ..., vₙ}满足以下两个条件,则称该向量组为V的基:1. 所有的向量v∈V都可以由B中的向量线性表出。
2. 如果B中的向量进行线性组合时等于零向量,那么必须其中的所有系数都等于零。
基的一个重要性质是线性无关性。
线性无关的向量组意味着每个向量都是独立的,不能由其他向量线性表示出来。
当一组向量线性无关时,它们的个数称为向量空间的维数。
二、维数的概念及性质在线性代数中,维数(dimension)是向量空间中独立向量的最大个数,记作dim(V)。
维数是衡量向量空间复杂程度的一个指标,它具有以下性质:1. 如果向量空间V中存在有限个向量使得它们线性无关,那么V的维数是有限的。
2. 如果在V中存在无穷多个向量,且它们线性无关,那么V的维数是无穷大。
3. 如果V的维数为n,那么V的任意一个基都包含n个向量。
4. 如果V的维数为n,那么V中的任意n+1个向量必然线性相关。
维数的计算方法也有一些常见的技巧。
对于有限维向量空间V而言,可以通过求解线性方程组的方法来求解维数。
另外,对于一些特殊的向量空间,也可以直接通过观察其内部的向量性质来确定维数。
三、基与维数的应用基与维数在线性代数中有广泛的应用,下面简要介绍几个常见的应用领域:1. 基变换与坐标系:在向量空间中,不同的基可以产生不同的坐标系,基变换就是在不同的基之间进行坐标的转换。
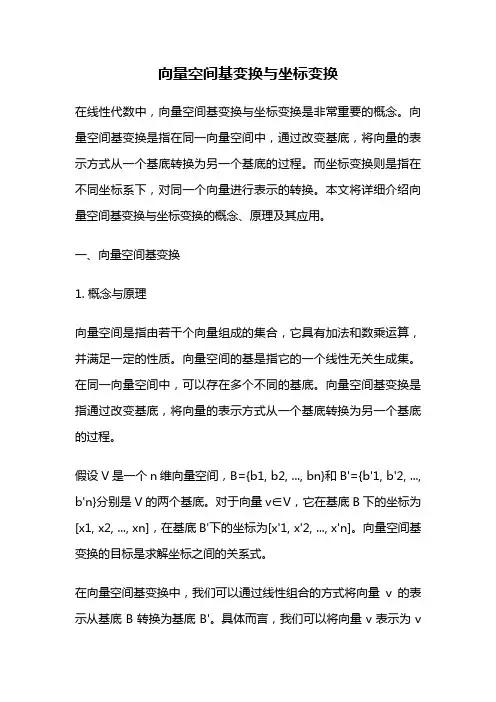
向量空间基变换与坐标变换在线性代数中,向量空间基变换与坐标变换是非常重要的概念。
向量空间基变换是指在同一向量空间中,通过改变基底,将向量的表示方式从一个基底转换为另一个基底的过程。
而坐标变换则是指在不同坐标系下,对同一个向量进行表示的转换。
本文将详细介绍向量空间基变换与坐标变换的概念、原理及其应用。
一、向量空间基变换1. 概念与原理向量空间是指由若干个向量组成的集合,它具有加法和数乘运算,并满足一定的性质。
向量空间的基是指它的一个线性无关生成集。
在同一向量空间中,可以存在多个不同的基底。
向量空间基变换是指通过改变基底,将向量的表示方式从一个基底转换为另一个基底的过程。
假设V是一个n维向量空间,B={b1, b2, ..., bn}和B'={b'1, b'2, ..., b'n}分别是V的两个基底。
对于向量v∈V,它在基底B下的坐标为[x1, x2, ..., xn],在基底B'下的坐标为[x'1, x'2, ..., x'n]。
向量空间基变换的目标是求解坐标之间的关系式。
在向量空间基变换中,我们可以通过线性组合的方式将向量v的表示从基底B转换为基底B'。
具体而言,我们可以将向量v表示为v= x1b1 + x2b2 + ... + xnbn,然后将每个基底b_i表示为b_i = a_{i1}b'_1 + a_{i2}b'_2 + ... + a_{in}b'_n。
将这两个式子代入到v 的表示中,得到v = (x1a_{11} + x2a_{21} + ... + xna_{n1})b'_1 + (x1a_{12} + x2a_{22} + ... + xna_{n2})b'_2 + ... + (x1a_{1n} + x2a_{2n} + ... + xna_{nn})b'_n。
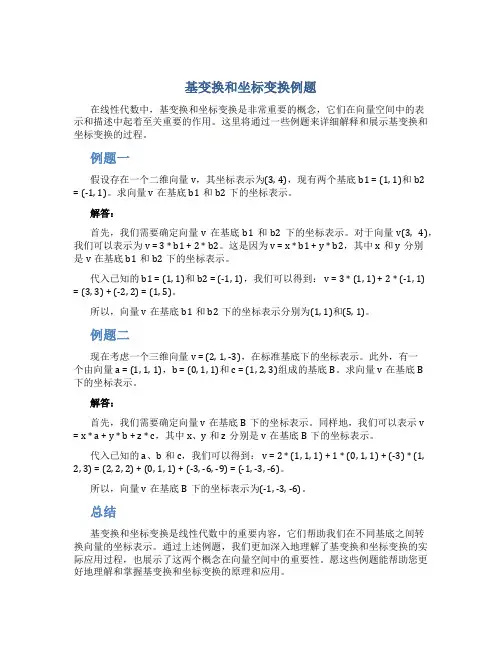
基变换和坐标变换例题在线性代数中,基变换和坐标变换是非常重要的概念,它们在向量空间中的表示和描述中起着至关重要的作用。
这里将通过一些例题来详细解释和展示基变换和坐标变换的过程。
例题一假设存在一个二维向量v,其坐标表示为(3, 4),现有两个基底b1 = (1, 1)和b2 = (-1, 1)。
求向量v在基底b1和b2下的坐标表示。
解答:首先,我们需要确定向量v在基底b1和b2下的坐标表示。
对于向量v(3, 4),我们可以表示为v = 3 * b1 + 2 * b2。
这是因为v = x * b1 + y * b2,其中x和y分别是v在基底b1和b2下的坐标表示。
代入已知的b1 = (1, 1)和b2 = (-1, 1),我们可以得到: v = 3 * (1, 1) + 2 * (-1, 1) = (3, 3) + (-2, 2) = (1, 5)。
所以,向量v在基底b1和b2下的坐标表示分别为(1, 1)和(5, 1)。
例题二现在考虑一个三维向量v = (2, 1, -3),在标准基底下的坐标表示。
此外,有一个由向量a = (1, 1, 1),b = (0, 1, 1)和c = (1, 2, 3)组成的基底B。
求向量v在基底B下的坐标表示。
解答:首先,我们需要确定向量v在基底B下的坐标表示。
同样地,我们可以表示v = x * a + y * b + z * c,其中x、y和z分别是v在基底B下的坐标表示。
代入已知的a、b和c,我们可以得到: v = 2 * (1, 1, 1) + 1 * (0, 1, 1) + (-3) * (1, 2, 3) = (2, 2, 2) + (0, 1, 1) + (-3, -6, -9) = (-1, -3, -6)。
所以,向量v在基底B下的坐标表示为(-1, -3, -6)。
总结基变换和坐标变换是线性代数中的重要内容,它们帮助我们在不同基底之间转换向量的坐标表示。
线性代数教学大纲线性代数教学大纲引言:线性代数是数学的一个重要分支,它研究向量空间和线性变换的性质。
线性代数在各个领域都有广泛应用,包括计算机科学、物理学、经济学等。
本文将探讨线性代数的教学大纲,旨在帮助学生全面理解和掌握线性代数的基本概念和方法。
一、线性代数的基本概念1. 向量和向量空间- 向量的定义和性质- 向量空间的定义和基本性质- 子空间和线性相关性2. 矩阵和矩阵运算- 矩阵的定义和性质- 矩阵的加法和乘法- 矩阵的转置和逆3. 线性变换和线性方程组- 线性变换的定义和性质- 线性方程组的解的存在性和唯一性- 线性方程组的矩阵表示和高斯消元法二、线性代数的基本方法1. 线性方程组的解法- 高斯消元法和矩阵的初等变换- 矩阵的秩和线性方程组的解的关系- 线性方程组的特解和齐次方程组的通解2. 向量空间的基与维数- 向量空间的基和坐标表示- 向量空间的维数和维数公式- 基变换和坐标变换3. 特征值和特征向量- 特征值和特征向量的定义- 特征多项式和特征方程- 对角化和相似矩阵三、线性代数的应用1. 线性代数在几何学中的应用- 向量的几何意义和运算- 线性变换对几何图形的影响- 线性方程组与几何图形的交点2. 线性代数在计算机科学中的应用- 矩阵的表示和运算- 线性变换在图形处理中的应用- 线性方程组的求解算法3. 线性代数在物理学中的应用- 向量的力学和电磁学应用- 矩阵在量子力学中的应用- 线性方程组在物理问题中的建模结论:通过学习线性代数的基本概念和方法,学生可以培养抽象思维和逻辑推理能力,为解决实际问题提供了强有力的工具。
线性代数的应用广泛,不仅在数学领域有重要地位,也在其他学科中发挥着重要作用。
因此,线性代数的教学大纲应该包括基本概念、基本方法和应用等内容,以便学生全面理解和掌握线性代数的知识和技能。
通过系统学习线性代数,学生可以为未来的学习和研究打下坚实的基础。
基变换和坐标变换例题
基变换和坐标变换是线性代数中的重要概念。
下面是一个简单的例题,涉及基变换和坐标变换:
假设有两个坐标系,分别是标准基下的坐标系和非标准基下的坐标系。
标准基下的坐标系的基向量为 {i, j},非标准基下的坐标系的基向量为 {u, v}。
已知非标准基下的坐标系中的一个向量的坐标为 (3, 4),求其在标准基下的坐标。
解答:
首先,我们需要进行基变换,将非标准基向量表示为标准基向量的线性组合。
假设向量 u 和v 可以表示为标准基向量的线性组合,即:
u = a * i + b * j
v = c * i + d * j
其中 a、b、c、d 是待求的系数。
然后,我们可以将非标准基下的坐标 (3, 4) 表示为非标准基向量的线性组合:
(3, 4) = x * u + y * v
将 u 和 v 的表达式代入上式,得到:
(3, 4) = (a * x + c * y) * i + (b * x + d * y) * j
由于等式两边的向量在同一个坐标系下,所以它们的坐标必须相等。
比较系数,我们可以得到以下方程组:
a * x + c * y = 3
b * x + d * y = 4
解这个方程组,可以得到 a、b、c、d 的值。
然后,将 a、b、c、d 的值代入 (3, 4) = x * u + y * v,就可以求得向量在标准基下的坐标。
请注意,这只是一个简单的例题,实际的基变换和坐标变换问题可能更加复杂。
在实际应用中,可能需要考虑更多的维度和变量。
基变换与坐标变换基变换和坐标变换是几何和线性代数学中最基本也是最重要的概念。
它们可以广泛用于物理、数学和计算机科学等领域。
基变换是指以特定的基为基础,将一个空间的点的坐标从一种坐标系中转换到另一种坐标系中。
坐标变换是指对一组坐标进行变换,使它们符合一定的转换关系,从而将其变换为另一组坐标。
基变换是特殊的矩阵乘法,通过多项式乘法将一维向量转换为另一维向量。
它能够将多维空间中的坐标转换为另一维坐标系,从而实现坐标变换。
例如,可以将三维空间中的点的坐标从直角坐标系转换到极坐标系中。
坐标变换涉及到变换的概念,这是一种线性变换,可以用矩阵表示。
它们描述了一组坐标在其原坐标系和目标坐标系之间的变换关系。
变换可以是任意维度的,例如二维坐标系或三维坐标系。
通常,在一维空间中,可以用一个参数来表示变换,而在二维和三维空间中,则需要使用两个或三个参数来表示变换。
变换也可以是平移、旋转或缩放等。
坐标变换是用来表示变换的线性变换,其可以用矩阵表示。
通常,会话变换的过程可以分为三个步骤:建立坐标系,确定变换矩阵,以及应用变换。
首先,可以根据理想坐标系,建立给定坐标系。
然后,可以构建变换矩阵,将原坐标系转换到目标坐标系中。
最后,可以使用定义好的变换矩阵,将变换的坐标这变换的穿好应用到给定的坐标系中。
基变换和坐标变换在三维空间中特别重要,它们可以应用于科学计算和图形学中的坐标转换和旋转等等。
一般来说,基变换和坐标变换的主要作用就是把不同空间中的点的坐标转换为一种更容易理解的坐标系。
这样,可以更容易地描述和表示几何空间中的物体,也方便对空间中物体实施线性变换。
解析几何中的向量坐标变换——线性代数知识要点向量坐标变换是解析几何中的重要概念,它涉及到线性代数的知识。
本文将对向量坐标变换的概念、基本操作以及应用进行解析,帮助读者更好地理解和应用线性代数知识。
一、向量坐标变换的概念向量坐标变换是指在不同坐标系之间进行向量的转换。
在解析几何中,我们常常需要在不同的坐标系之间进行变换,例如从直角坐标系转换为极坐标系,或者从二维坐标系转换为三维坐标系等。
向量坐标变换可以帮助我们在不同的坐标系下描述和计算向量。
二、向量坐标变换的基本操作1. 向量的表示在解析几何中,向量通常用有序数组表示。
例如,二维向量可以表示为(x, y),三维向量可以表示为 (x, y, z)。
不同坐标系下的向量表示可能不同,但其本质是相同的。
2. 坐标变换矩阵坐标变换可以通过矩阵乘法来实现。
假设有两个坐标系 A 和 B,向量 V 在坐标系 A 下的表示为 V_A,在坐标系 B 下的表示为 V_B。
那么,向量 V_A 和 V_B之间的关系可以表示为 V_B = M * V_A,其中 M 是一个变换矩阵。
变换矩阵 M 的具体形式取决于坐标系 A 和 B 的定义,可以通过线性代数的方法求解。
3. 坐标变换的应用向量坐标变换在解析几何中有广泛的应用。
例如,在计算机图形学中,常常需要将三维物体的坐标转换到屏幕上进行显示。
这就涉及到从三维坐标系到二维坐标系的变换。
通过向量坐标变换,可以方便地描述和计算物体在不同坐标系下的位置、方向等属性。
三、线性代数知识要点1. 线性变换坐标变换本质上是一种线性变换。
线性变换是指保持向量加法和数量乘法运算的变换。
例如,平移、旋转和缩放等操作都是线性变换。
线性变换具有一些重要的性质,例如可逆性、保持直线性质等。
2. 线性变换矩阵线性变换可以通过矩阵来表示。
对于二维向量,线性变换可以表示为 T(v) = A * v,其中 T 是线性变换,A 是变换矩阵,v 是向量。
变换矩阵 A 的列向量表示了变换后的基向量。