阀控液压马达速度伺服系统仿真分析资料报告
- 格式:doc
- 大小:431.07 KB
- 文档页数:8
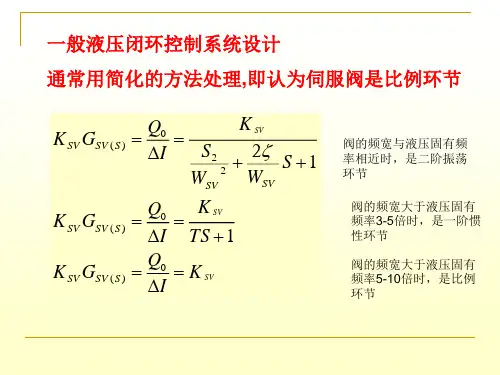
引言液压伺服系统是以液体压力能为动力的机械量(位移、速度和力)自动控制系统按系统。
控机械量的不同,它又可以分为电液位置伺服系统、电液速度伺服控制系统和电液力控制系统三种。
电液控制系统的基本元件包括电磁阀、电液开关控制阀、光电耦合器、功率放大器、电—机械转换器、普通电液伺服阀(频宽数十赫)、高频电液伺服阀(国内产品 400 赫)、电液比例流量阀、电液比例压力阀、电液比例方向阀、电液复合阀、电液比例泵、电液通断控制阀、电液数字阀、电液数字缸、电液数字泵等。
它们广泛用于机床工业、冶金工业、船舶工业、煤炭工业和工程机械等的控制系统中。
本文要研究的是电液速度控制系统及其仿真分析,是对电液速度控制系统的各个环节进行了数学模型的建立,并应用Matlab/Simulink对电液速度控制系统进行了仿真分析,通过幅频特性和相频特性的变化得到数学模型中各个部分对整个控制系统的影响。
1 绪论液压控制是液压技术领域的重要分支。
近20年来,许多工业部门和技术领域对高响应、高精度、高功率—重量比和大功率液压控制系统的需要不断扩大,促使液压控制技术迅速发展。
特别是控制理论在液压系统中的应用、计算及电子技术与液压技术的结合,使这门技术不论在元件和系统方面、理论与应用方面都日趋完善和成熟,并形成一门学科。
目前液压技术已经在许多部门得到广泛应用,诸如冶金、机械等工业部门及飞机、船舶部门等。
我国于50年代开始液压伺服元件和系统的研究工作,现已生产几种系列电液伺服产品,液压控制系统的研究工作也取得很大进展。
1.1电液控制技术的发展及趋势液压技术的发展与流体力学理论研究相互关联。
自1650年帕斯卡提出静态液体中的压力传播规律--帕斯卡原理以来,1686年牛顿揭示了粘性液体的内摩擦定律,18世纪建立了流体力学的连续性方程。
这些理论的建立为液压技术的发展奠定了理论基础。
从1795年,英国人首先制造出世界上第一台水压机起,液压传动开始进入工程领域。
阀控液压马达速度伺服系统仿真分析引言阀控液压马达速度伺服系统的负载具有较大的惯性与很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。
此外,系统的负载常就是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID 控制理论来提高系统的动态性能。
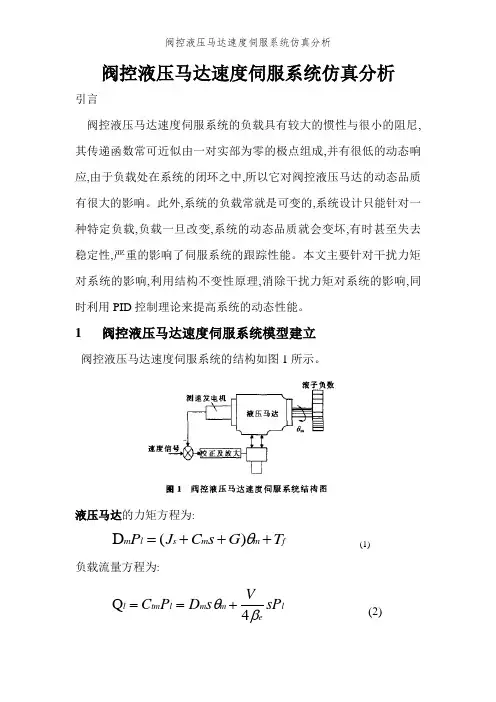
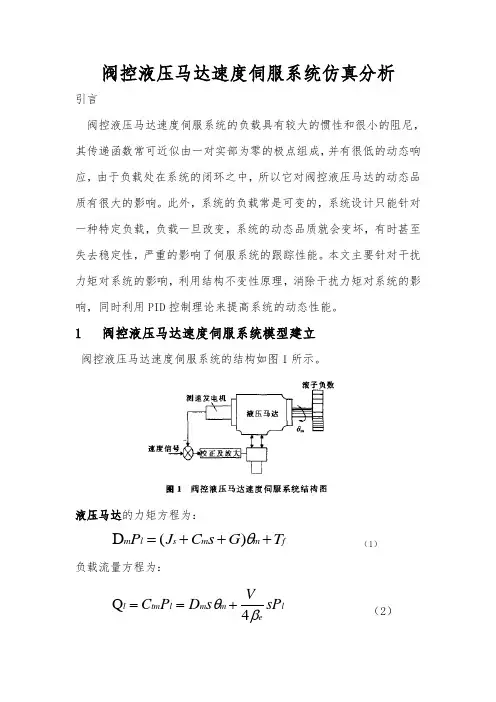
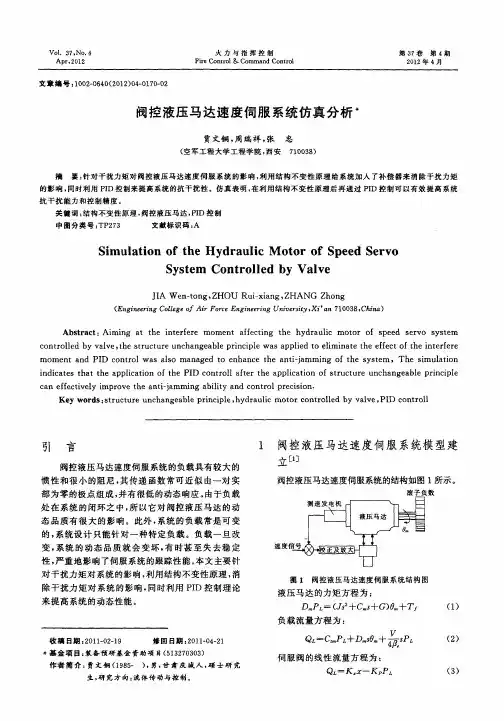
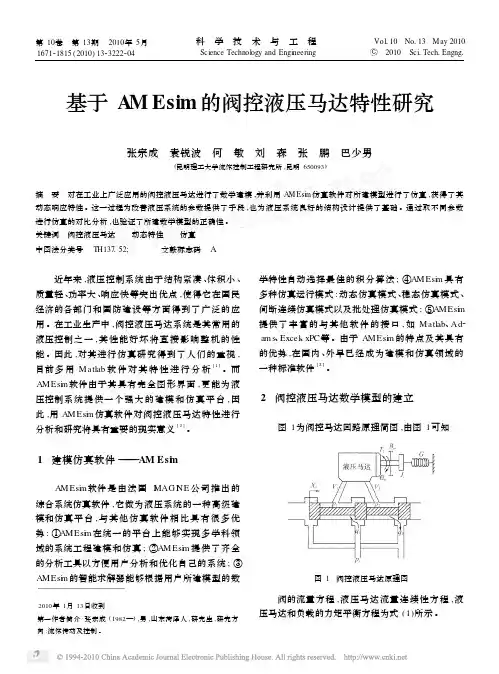
1 阀控液压马达速度伺服系统模型建立阀控液压马达速度伺服系统的结构如图1所示。
液压马达的力矩方程为:fm m s l m T G s C J P +++=θ)(D (1)负载流量方程为:l em m l tm l sP Vs D P C βθ4Q +== (2)伺服阀的线性流量方程为:L p x l P K x k Q -= (3)电液伺服阀近似瞧成二阶振荡环节:122^2^)()(++=s S K s i s x svsvsv svv ωξω (4) 伺服放大器输出电流ΔI 与输入电压Ue 近似成正比,其传递函数可用伺服放大器增益Ka 表示:但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作。
校正后的积分放大器增益Ka 表示为:测速机速度传感器(测速机)的数学模型为:在上述公式中:v x 为电液伺服阀阀芯位移;i 为电液伺服阀输入电流;v sv k s sv ωξ、、分别为电液伺服阀的增益、阻尼系数与固有频率;m D 为马达排量;L Q 为马达的负载流量;x K 为流量增益系数;p K 为流量一压力系数;只为供油压力;s P 为负载压力;m θ为马达转速;e β为从油液有效体积弹性模数;V 为马达的总容积;J 为折算到马达输出轴上的转动惯量;f T 为外干扰力矩;tm C 为马达泄露系数;m C 为粘性阻尼系数;G 为扭簧梯度。
泵控马达速度控制系统P I D控制器的设计与仿真综述(总52页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--石家庄铁道大学毕业设计泵控马达速度控制系统PID控制器的设计与仿真Design of PID Controller for Pump Controlled Motor Speed Control System2016 届电气与电子工程学院专业电气工程及其自动化学号学生姓名武云飞指导教师郑海青完成日期 2016年6月 11 日摘要随着科学水平的发展,泵控马达系统越来越多的应用于民用以及军用领域,这是由于泵控马达具有一些其他系统不具备的优点,该系统效率高、转动惯量小同时其响应速度迅速。
然而泵控马达系统在实际的生产生活中常常会出现系统负载频繁变化的情况,这种情况会导致系统的输出速度不稳定,严重时可能导致系统的瘫痪。
本设计的目的就是为了寻找一个较为适合泵控马达系统的控制系统用以克服外负载以及模型变化对系统产生的影响。
通过对泵控马达系统的组成的学习和研究以及对液压回路的工作原理的分析,建立起泵控马达速度控制系统的数学模型,借此来实现对泵控马达速度控制系统的仿真模拟。
在该数学模型的基础上,采用PID控制器作为系统的控制环节,分别对传统PID控制器、位置式PID控制器、增量式PID控制器以及抗积分饱和PID控制器进行系统的仿真模拟,通过对系统进行仿真,比较在外负载干扰的情况下马达转速的响应曲线,从而得出哪种PID控制器更适合泵控马达调速系统。
经过仿真分析对比,可以看出,抗积分饱和PID控制器较其他三种PID控制器有着更短的调节时间以及平滑的曲线,能更符合系统对于马达转速控制的要求。
所以最终选择抗积分饱和PID控制器作为系统的控制环节。
关键词:泵控马达;PID控制器;仿真AbstractWith the development of technology, pump controlled motor system more and more applied in civil and military fields, this is because the pump controlled motor system has some advantages that other systems do not have, this system is highly efficient, low mom -ent of inertia, and fast response. However, pump controlled motor system often appears system load change in actually, the load change can cause the system output speed not stable, severe cases may lead to paralysis of the system. The purpose of this design is to find a suitable control system that can solve to the impact of load changes.Through to the study of pump controlled motor system and the analysis of the hydraulic circuit, we establish the mathematical model of pump controlled motor system, with the system, we can realize the simulation of the pump controlled motor control system. On the basis of the mathematical model, we simulate the traditional PID controller, posi -tional PID controller, incremental PID controller and anti-windup PID controller for respectively. By compare the motor speed response curve which in the case of external load disturbance, which PID controller we can draw is more suitable for pump controlled motor speed control system. Through simulation comparison, we can get that anti-windup PID controller has a more smooth curve and a shorter adjusting time. So we finally choose anti-windup PID controller as the control link of the system.Key words:pump motor control;t he PID controller;simulation目录第1章绪论 0课题研究的背景意义 0PID控制器简介 (2)主要内容 (4)第2章泵控马达调速系统模型的建立 (5)泵控马达调速系统基本原理 (5)时域数学模型 (6)电-机械转换元件的模型建立 (6)比例方向控制阀4WRA6的模型建立 (7)变量泵的阀控液压缸模型的建立 (8)活塞-斜盘倾角环节模型的建立 (10)建立泵控马达的回路模型 (11)速度传感器以及比例放大器的模型建立 (13)建立系统的开环传递函数 (14)系统中各环节参数的整定 (16)求解比例放大器的增益系数 (16)比例方向控制阀的增益系数 (16)系统的流量增益系数 (16)活塞斜盘倾角传递函数 (16)泵-马达环节的参数整定 (17)对系统稳定性的检测 (18)控制系统的基本要求 (18)系统稳定性检测 (18)本章小结 (19)第3章泵控马达PID控制器设计与仿真 (20)PID控制器的基本原理 (20)四种PID控制器简介 (20)位置式PID控制算法 (20)增量式PID控制算法 (22)抗积分饱和PID控制算法 (23)PID控制器设计 (24)PID控制器参数的整定 (25)PID控制器仿真 (25)关于Simulink的简介 (25)PID控制器的仿真分析 (25)泵控马达速度控制系统的仿真模拟 (27)本章小结 (32)第4章结论与展望 (33)结论 (33)展望 (33)参考文献 (35)致谢 (37)附录 (39)附录A 外文资料翻译 (39)英文 (39)译文 (44)附录B 泵控马达速度控制系统仿真图 (47)第1章绪论课题研究的背景意义随着时代的发展,各种科技也在飞快的发展着,工业自动化水平的高低早已经成为了衡量各个部门现代化水平的标志,而工业自动化必然离不开动力的源泉——马达。
阀控液压马达速度伺服系统仿真分析引言阀控液压马达速度伺服系统的负载具有较大的惯性和很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。
此外,系统的负载常是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID 控制理论来提高系统的动态性能。
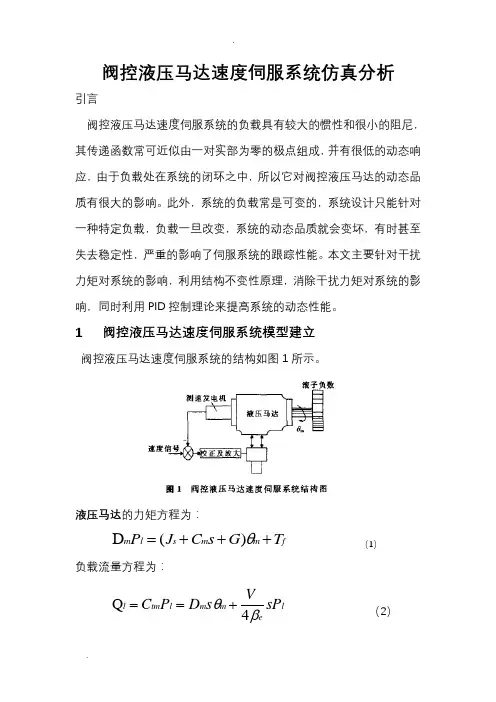
1 阀控液压马达速度伺服系统模型建立阀控液压马达速度伺服系统的结构如图1所示。
液压马达的力矩方程为:fm m s l m T G s C J P +++=θ)(D (1)负载流量方程为:l em m l tm l sP Vs D P C βθ4Q +== (2)伺服阀的线性流量方程为: L p x lP K x k Q -= (3)电液伺服阀近似看成二阶振荡环节:122^2^)()(++=s S K s i s x svsvsv svv ωξω (4) 伺服放大器输出电流ΔI 与输入电压Ue 近似成正比,其传递函数可用伺服放大器增益Ka 表示:但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作。
校正后的积分放大器增益Ka 表示为:测速机速度传感器(测速机)的数学模型为:在上述公式中:v x 为电液伺服阀阀芯位移;i 为电液伺服阀输入电流;v sv k s sv ωξ、、分别为电液伺服阀的增益、阻尼系数和固有频率;m D 为马达排量;L Q 为马达的负载流量;x K 为流量增益系数;p K 为流量一压力系数;只为供油压力;s P 为负载压力;m θ为马达转速;e β为从油液有效体积弹性模数;V 为马达的总容积;J 为折算到马达输出轴上的转动惯量;f T 为外干扰力矩;tm C 为马达泄露系数;m C 为粘性阻尼系数;G 为扭簧梯度。
・28・计算机应用技术机械 2008年第 1期总第 35卷基于AMESim 的阀控液压缸液压伺服系统仿真邬国秀(襄樊学院机械工程系,湖北襄樊 441003)摘要:AMESim 是法国IMAGINE 公司开发的高级工程系统仿真建摸环境,为机械、液压、控制等工程系统提供了一个较为完善的仿真环境。
首先介绍了AMESim 软件的功能和特点,并以阀控液压缸液压伺服系统为例,探讨了基于AMESim 的液压伺服系统的模型建立、参数设置和仿真方法,得出了仿真结果,并对改变系统元件参数下的仿真结果进行了比较与分析。
关键词:AMESim ;建模;参数设置;仿真;液压伺服系统中图分类号:TP391.9 文献标识码:A 文章编号:1006-0316(200800-0028-03Simulation of valve-controlled cylinder hydraulic servo system based on AMESimWU Guo-xiu(Department of Mechanical Engineering,Xiangfan University,Xiangfan 441003,chinaAbstract :AMESim is an advanced modelling environment for performing simulations of engineering systems produced by IMAGINE inc. of France, and it provides a whole modelling environment for mechanism, hydraulic and control system. The functions and characteristics of AMESim software are introduced in this paper. Taking valve-controlled cylinder hydraulic servo system as an example, this paperdiscusses the modeling, parameter setting and simulation method of hydraulic servo system based on AMESim, and gives the results of simulation. The comparision and analylsis of the results of simulation by changing the components parameters have been performed.Key words:AMESim ;modeling ;parameter setting;simulation ;hydraulic servo system随着仿真理论及计算机技术的不断发展,工程系统的设计开发中,仿真技术可使企业在最短时间内以最低成本将新产品投放市场;科学研究中,可利用仿真技术缩短研究周期,降低科研成本与风险,提高研究水平,加速科研成果转化为生产力的进程。
阀控液压马达速度伺服系统仿真分析引言阀控液压马达速度伺服系统的负载具有较大的惯性和很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。
此外,系统的负载常是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID 控制理论来提高系统的动态性能。
1 阀控液压马达速度伺服系统模型建立阀控液压马达速度伺服系统的结构如图1所示。
液压马达的力矩方程为:fm m s l m T G s C J P +++=θ)(D (1)负载流量方程为:l em m l tm l sP Vs D P C βθ4Q +== (2)伺服阀的线性流量方程为:L p x l P K x k Q -= (3)电液伺服阀近似看成二阶振荡环节:122^2^)()(++=s S K s i s x svsvsv svv ωξω (4) 伺服放大器输出电流ΔI 与输入电压Ue 近似成正比,其传递函数可用伺服放大器增益Ka 表示:错误!未找到引用源。
但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作。
校正后的积分放大器增益Ka 表示为:测速机速度传感器(测速机)的数学模型为:错误!未找到引用源。
在上述公式中:v x 为电液伺服阀阀芯位移;i 为电液伺服阀输入电流;v sv k s sv ωξ、、分别为电液伺服阀的增益、阻尼系数和固有频率;m D 为马达排量;L Q 为马达的负载流量;x K 为流量增益系数;p K 为流量一压力系数;只为供油压力;s P 为负载压力;m θ为马达转速;e β为从油液有效体积弹性模数;V 为马达的总容积;J 为折算到马达输出轴上的转动惯量;f T 为外干扰力矩;tm C 为马达泄露系数;m C 为粘性阻尼系数;G 为扭簧梯度。

2010年第9期液压与气动基于A MESi m的泵控马达变转速系统仿真分析彭天好,朱刘英,胡佑兰Sm i ulati on analysis of pu mp contro l motor varia b le speedsyste m based on AMES m iPE NG T ian hao,Z HU L i u y ing,HU You lan(安徽理工大学机械工程学院,安徽淮南 232001)摘 要:介绍了泵控马达变转速调速实验系统的组成,推导了变频器及电机的数学模型,根据数学模型在AMES i m中构建了变频器及电机的仿真模型,并与液压系统回路仿真模型相结合,从而在AMES i m中建立了泵控马达变转速调速系统的仿真模型,并对系统的开环及闭环PI D特性进行了仿真分析,通过仿真分析,得到了有益的结论。
关键词:AM ESi m;泵控马达;变转速;PI D控制;仿真分析中图分类号:TP137 文献标识码:B 文章编号:1000 4858(2010)09 0033 030 引言变量泵控马达的容积调速回路常用于大功率液压系统中,在工程领域也有较广泛的应用,如采煤机、液压提升机等。
但是这种泵控马达容积调速方式存在系统复杂、自动化程度低、对油液要求较高等缺点,其控制精度、工作效率没有得到很大的提高。
交流变频电机与定量泵构成的电液控制系统不仅同样可以避免节流和溢流损耗,而且在轻载时还可提高异步电动机的运行效率和功率因数,泵控马达变转速调速系统在不同的控制参量时具有不同的性能特点和控制方法[1-2],本文主要是通过在AMES i m中建立系统的仿真模型,分析马达的转速特性,并通过PI D控制,改善系统的性能。
1 泵控马达变转速系统的原理泵控马达变转速系统的原理图如图1所示,系统主要有由变频器、变频调速三相异步电机、变量泵、溢流阀、比例方向阀、比例溢流阀、马达和加载泵组成。
改变变频器1接收的控制信号,可以改变变频器供给异步电机2的电压,从而调节电机的转速,电机带动主液压泵3旋转使其输出一定流量的压力油,压力油经单向阀4、截止阀5和比例方向阀7驱动双向定量马达8做回转运动,通过改变主泵的转速和方向来控制马达8的转速和旋转方向,马达出油口的低压油经比例方向阀再流回油箱。
液压仿真系统实验结论
通过液压仿真系统实验,我们得出以下结论:
1. 液压系统传动效率高,能够承受大功率和高速度的传动。
2. 液压系统响应速度快,能够快速调整和控制工作设备的运动。
3. 液压系统能够实现多种复杂的运动形式,如旋转、摆动、升降等。
4. 液压系统的控制和调节较为简单,可以通过调整流量和压力来实现设备的控制。
5. 液压系统在使用过程中需要注意维护和保养,避免出现漏油、渗漏等问题。
以上结论表明,液压系统在机械传动领域具有广泛的应用前景,但需要注意维护和保养。
- 1 -。
DOI:10.13733/j.jcam.issn.2095-5553.2014.06.033中国农机化学报Journal of Chinese Agricultural Mechanization 第35卷第6期2014年11月Vol .35No .6Nov.2014比例调速阀控马达液压回路仿真分析陈鹏伟,解宁,郭津津摘要:从比例调速阀的工作机能出发,分析了比例调速阀中的起压力补偿作用的定差减压阀对流量的影响,其始终保持节流阀阀口前后的压差基本恒定不变,减弱了负载变化对系统流量的影响,然后扩展到液压系统,从系统整体分析了比例调速阀控马达系统的稳定性及其压力和流量的动态特性,最终达到马达的运动速度均匀平稳,从而为节流调速系统的设计改进提供技术上的支持。
关键词:比例调速阀;AMESim ;动态特性;仿真分析中图分类号:TH137.5文献标识码:A文章编号:2095-5553(2014)06-0131-04陈鹏伟,解宁,郭津津.比例调速阀控马达液压回路仿真分析[J].中国农机化学报,2014,35(6):131~134Chen Pengwei,Xie Ning,Guo Jinjin.Simulative analysis of motor hydraulic circuit by proportional speed valve control [J].Journal of Chinese A -gricultural Mechanization,2014,35(6):131~134(天津理工大学复杂系统控制理论及应用重点实验室,天津市,300384)收稿日期:2013年9月12日修回日期:2013年10月12日第一作者:陈鹏伟,男,1986年生,河北石家庄人,硕士研究生;研究方向为液压系统动态特性。
E-mail:chenpw8612@0引言液压系统的动静态特性受元件参数等多种因素的影响,当参数调整不当时,调速系统的作用无法发挥,甚至会影响整个液压系统的稳定性。
基于AMESim 的电液伺服速度控制系统仿真分析王强吴张永李红星武鹏飞刘建强(昆明理工大学流体控制工程研究所,云南昆明650093)摘要:在电液伺服控制系统设计分析中,由于传统的数学建模方法比较复杂,本文利用面向工程设计的高级建模软件AMESim 对阀控液压马达电液伺服速度控制系统进行建模,并对其动态特性进行了仿真分析,得到了较好的分析结果。
关键词:电液伺服控制系统;AMESim;仿真分析中图分类号:TH137 文献标识码:A 文章编号:1008- 0813(2008)04- 0031- 03 Simulation Analysis of Electro- Hydraulic Servo Velocity Control System Based on AMESim WANG Qiang WU Zhang-yong LI Hong-xing WU Peng-fei LIU Jian-qiang (Institute of Fluid Power Control Engineering, Kunming University of Science and Technology,Kunming 650093, China)Abstract: Conventional mathematical modeling, which is used in analysis of designing eletro-hydraulic servo control system, is comparative complex. This paper use AMESim software, which orients engineering design ,modeling hydraulic valve- controlled velocity system, analyzing dynamic characteristics of this system, getting a better analytical result.Key Words: eletro-hydraulic servo control system;AMESim;simulation analysis0 引言在实际工程中,经常需要进行速度控制,如机床进给装置的速度控制,雷达天线、炮塔、转台的姿态跟踪以及发电机、气轮机和水轮机的调速系统等。
引言液压伺服系统是以液体压力能为动力的机械量(位移、速度和力)自动控制系统按系统。
控机械量的不同,它又可以分为电液位置伺服系统、电液速度伺服控制系统和电液力控制系统三种。
电液控制系统的基本元件包括电磁阀、电液开关控制阀、光电耦合器、功率放大器、电—机械转换器、普通电液伺服阀(频宽数十赫)、高频电液伺服阀(国内产品 400 赫)、电液比例流量阀、电液比例压力阀、电液比例方向阀、电液复合阀、电液比例泵、电液通断控制阀、电液数字阀、电液数字缸、电液数字泵等。
它们广泛用于机床工业、冶金工业、船舶工业、煤炭工业和工程机械等的控制系统中。
本文要研究的是电液速度控制系统及其仿真分析,是对电液速度控制系统的各个环节进行了数学模型的建立,并应用Matlab/Simulink对电液速度控制系统进行了仿真分析,通过幅频特性和相频特性的变化得到数学模型中各个部分对整个控制系统的影响。
1 绪论液压控制是液压技术领域的重要分支。
近20年来,许多工业部门和技术领域对高响应、高精度、高功率—重量比和大功率液压控制系统的需要不断扩大,促使液压控制技术迅速发展。
特别是控制理论在液压系统中的应用、计算及电子技术与液压技术的结合,使这门技术不论在元件和系统方面、理论与应用方面都日趋完善和成熟,并形成一门学科。
目前液压技术已经在许多部门得到广泛应用,诸如冶金、机械等工业部门及飞机、船舶部门等。
我国于50年代开始液压伺服元件和系统的研究工作,现已生产几种系列电液伺服产品,液压控制系统的研究工作也取得很大进展。
1.1电液控制技术的发展及趋势液压技术的发展与流体力学理论研究相互关联。
自1650年帕斯卡提出静态液体中的压力传播规律--帕斯卡原理以来,1686年牛顿揭示了粘性液体的内摩擦定律,18世纪建立了流体力学的连续性方程。
这些理论的建立为液压技术的发展奠定了理论基础。
从1795年,英国人首先制造出世界上第一台水压机起,液压传动开始进入工程领域。
阀控液压马达速度伺服系统仿真分析
引言
阀控液压马达速度伺服系统的负载具有较大的惯性和很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。
此外,系统的负载常是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID 控制理论来提高系统的动态性能。
1 阀控液压马达速度伺服系统模型建立
阀控液压马达速度伺服系统的结构如图1所示。
液压马达的力矩方程为:
f
m m s l m T G s C J P +++=θ)(D (1)
负载流量方程为:
l e
m m l tm l sP V
s D P C βθ4Q +== (2)
伺服阀的线性流量方程为:
L p x l P K x k Q -= (3)
电液伺服阀近似看成二阶振荡环节:
1
22^2^)()(++=
s S K s i s x sv
sv
sv sv
v ωξω (4) 伺服放大器输出电流ΔI 与输入电压Ue 近似成正比,其传递函数可用伺服放大器增益Ka 表示:
错误!未指定书签。
但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作。
校正后的积分放大器增益Ka 表示为:
测速机速度传感器(测速机)的数学模型为:
错误!未指定书签。
在上述公式中:v x 为电液伺服阀阀芯位移;i 为电液伺服阀输入电流;v sv k s sv ωξ、、分别为电液伺服阀的增益、阻尼系数和固有频率;m D 为马达排量;L Q 为马达的负载流量;
x K 为流量增益系数;p K 为流量一压力系数;只为供油压力;s P 为负
载压力;m θ为马达转速;e β为从油液有效体积弹性模数;V 为马达的总容积;J 为折算到马达输出轴上的转动惯量;f T 为外干扰力矩;
tm C 为马达泄露系数;m C 为粘性阻尼系数;G 为扭簧梯度。
Ue 为积分
放大器额定电压,;Ka 为积分放大器增益。
错误!未指定书签。
为传感器电压;错误!未指定书签。
为速度传感器增益。
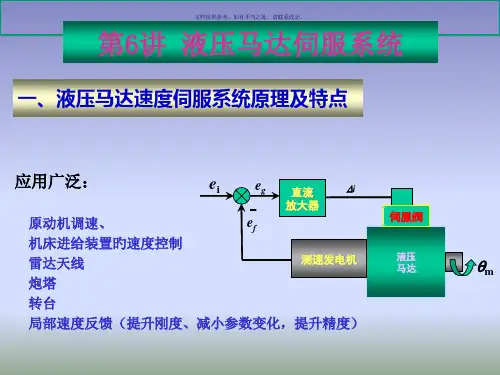
2 电液速度控制系统原理
首先给出阀控液压马达速度控制系统的实际物理模型:
如图所示,该系统由伺服放大器、电液伺服阀、液压马达、测速电动机等组成。
测速电机轴与负载机轴相联,用于检测负载轴的速度,检测到的速度信号与指令信号差(误差信号)经伺服放大器进行功率放大,产生的电流用来控制电液伺服阀的阀芯位置,电液伺服阀输出压力油驱动液压马达及负载旋转。
根据所建立的物理模型,可以建立相对应的闭环控制系统原理的方框图:
伺服放大器
伺服阀
液压马达
测速机
速度信号电压
+
-
仿真系统动态方块图
根据所给出的系统原理方框图以及所求得的各环节数学模型,可以得出仿真系统经过积分环节校正后的系统动态方块图如下:
K a
s
K sv
s2
ωsv2
+2ξh
ωsv
s+1
K s
s2
ωh2+
2ξh
ωh s+1
K fs s
Ur
Uf
Ue
+
-
θm
3 问题描述
现有一阀控液压伺服速度控制系统,其原理图如图1,考虑伺服阀的动态,伺服参数为:错误!未指定书签。
=3060e-6,错误!未指定书签。
=600,错误!未指定书签。
=0.5,液压缸的参数为错误!未指定书签。
=1.25e6,错误!未指定书签。
=388,错误!未指定书签。
=0.94,放大器增益错误!未指定书签。
=0.05,试用simulink对该系统进行动态分析,并比较校正前后系统稳定性,分析校正前后的变化。
4 解题步骤
(1)根据给定的参数,利用simulink对该系统进行未加积分环节校正的系统建模,如下图所示:
未校正系统的simulink模型
(2)绘制未校正系统的伯德图。
Matlab程序如下:
clear all;clc;
Wsv=600;zuni1=0.5;Ksv=3060e-6;Ka=0.05;i=3;Kf=0.175;
Wh=388;zuni2=0.94;Kh=1.25e6;
sys=tf(Ka*Ksv*i*Kf*Kh,conv([1/Wsv^2 2*zuni1/Wsv 1],[1/Wh^2 2*zuni2/Wh 1]));
Figure;margin(sys);
grid;
分析bode图:
从图可看出系统的稳定裕量(Gm=-32.6dB,Pm=-128°)为负,可以断定其闭环系统是不稳定的。
及时K0值调很低,对数幅频特性曲线也是以-80dB/dec或-40dB/dec的斜率穿过零分贝线,系统的相位
裕量和幅值裕量都趋于负值,使系统不稳定。
为了使系统有一定的稳定裕度量,必须加校正环节。
在速度控制系统中,可以用运算放大器组成积分放大器代替原来的放大器。
积分放大器如下图所示:
积分放大器
其传递函数为:
其中,Ka=0.05。
加了校正之后的系统仿真方框图如下:
校正后速度控制系统的仿真框图
矫正后的MATLAB程序:
clear all;clc;
Wsv=600;zuni1=0.5;Ksv=3060e-6;Ka=0.05;i=3;Kf=0.175;
Wh=388;zuni2=0.94;Kh=1.25e6;
sys=tf(Ka*Ksv*Kh,conv([1/Wsv^2 2*zuni1/Wsv 1 0],[1/Wh^2 2*zuni2/Wh 1]));
figure;margin(sys);
grid;
从伯德图看出校正后的系统穿越频率下降到247 rad/s,Gm=4.09dB,Pm=26.7deg,可看出系统有正的相角裕度,因而该系统闭环是稳定的。
阀控液压马达速度伺服系统仿真分析
专业:机械设计制造及其自动化
班级:(2)班
:王仲凯
学号:120312005
指导老师:董甲东。