《现代控制理论基础》第九章(6)
- 格式:pdf
- 大小:1.26 MB
- 文档页数:56


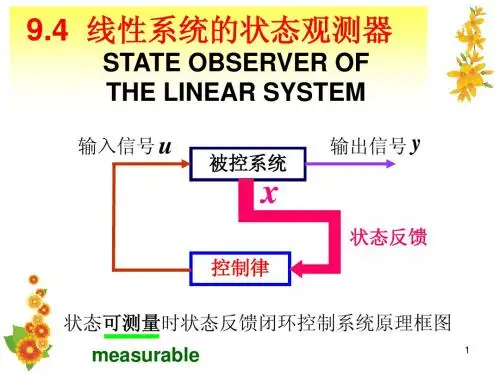
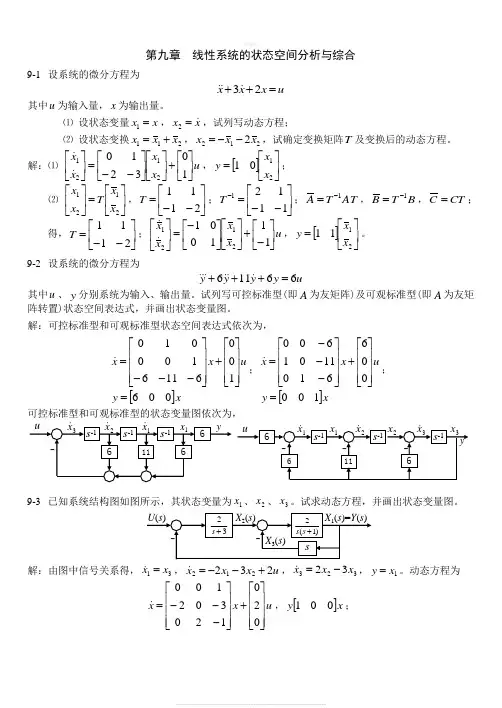
第九章 线性系统的状态空间分析与综合9-1 设系统的微分方程为u x x x=++23 其中u 为输入量,x 为输出量。
⑴ 设状态变量x x =1,xx =2,试列写动态方程; ⑵ 设状态变换211x x x +=,2122x x x --=,试确定变换矩阵T 及变换后的动态方程。
解:⑴ u x x x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡1032102121 ,[]⎥⎦⎤⎢⎣⎡=2101x x y ; ⑵ ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡2121x x T x x ,⎥⎦⎤⎢⎣⎡--=2111T ;⎥⎦⎤⎢⎣⎡--=-11121T ;AT T A 1-=,B T B 1-=,CT C =; 得,⎥⎦⎤⎢⎣⎡--=2111T ;u x x x x ⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡1110012121 ,[]⎥⎦⎤⎢⎣⎡=2111x x y 。
9-2 设系统的微分方程为u y y yy 66116=+++ 其中u 、y 分别系统为输入、输出量。
试列写可控标准型(即A 为友矩阵)及可观标准型(即A 为友矩阵转置)状态空间表达式,并画出状态变量图。
解:可控标准型和可观标准型状态空间表达式依次为,[]x y u x x 0061006116100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---= ;[]xy u x x 1000066101101600=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---= ; 可控标准型和可观标准型的状态变量图依次为,9-3 已知系统结构图如图所示,其状态变量为1x 、2x 、3x 。
试求动态方程,并画出状态变量图。
解:由图中信号关系得,31x x= ,u x x x 232212+--= ,32332x x x -= ,1x y =。
动态方程为 u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020********* ,[]x y 001;状态变量图为9-4 已知双输入双-输出系统状态方程和输出方程23213213212161162u x x x xu u x xu x x+---=-+=+= ,32122112x x x y x x y -+=-=, 写出其向量-矩阵形式并画出状态变量图。

第九章 传递函数的状态空间实现§9.1实现与最小实现一、实现问题的提法我们知道,对于一个线性定常系统,可以用传递函数矩阵进行输入输出描述)(ˆ)(ˆ)(ˆs s s u G y = (9.1.1)如果系统还是集中的,则还可以用状态空间方程来描述 Du Cx y Bu Ax x+=+=(9.1.2)如果已知状态空间方程(9.1.2),则相应的传递矩阵可由D B A I C G +-=-1)()(ˆs s (9.1.3)求出,且求出的矩阵是唯一的。
现在,我们来研究它的反问题,即由给定的传递矩阵来求状态空间方程,这就是所谓的实现问题。
事实上,对于时变系统也有实现问题,只是它的输入输出描述不再是传递矩阵。
定义9.1:实现传递矩阵)(ˆs G 称为是能实现的是指存在一个有限的维状态方程(9.1.2)或简记为{ A , B , C , D },使得D B A I C G+-=-1)()(ˆs s 且{ A , B , C , D }称作)(ˆs G的实现。
注意:一个线性定常系统的分布系统可以用传递矩阵来描述,但不能描述为有限维的状态方程。
所以说并非所有的)(ˆs G都是能实现的。
二、实现的不唯一性仔细回忆一下我们在状态变换和规范分解时得到的结论可知:尽管对于给定系统{ A , B , C , D },它的传递函数矩阵)(ˆs G是唯一的;但反过来,对于给定系统的传递函数矩阵)(ˆs G,求它的状态空间实现{ A , B , C , D },结论便不唯一。
因为我们知道,状态变换前后,系统的状态空间方程可能大相径庭,但其传递函数矩阵却是相同的;同样,不能控或不能观系统,经规范分解后的整个系统与其中的既能控又能观的子系统均是其传递函数的一个实现。
所以,如果)(ˆs G是能实现的则其有无穷多各个实现,且不一定具有相同的维数。
三、最小实现尽管每一个传递函数阵,可以有无限多个实现。
我们感兴趣的是这些实现中维数最小的实现,即所谓最小实现,也叫不可约实现、最小维实现、最小阶实现。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 教学内容与目标第二章:线性控制系统的基本理论2.1 数学基础2.1.1 向量与矩阵2.1.2 复数与复矩阵2.1.3 拉普拉斯变换与Z变换2.2 线性微分方程2.3 线性差分方程2.4 线性系统的状态空间描述2.5 线性系统的传递函数2.6 小结第三章:线性控制系统的稳定性分析3.1 系统稳定性的概念3.2 劳斯-赫尔维茨稳定性判据3.3 奈奎斯特稳定性判据3.4 李雅普诺夫稳定性理论3.5 小结第四章:线性控制系统的性能分析与设计4.1 性能指标4.1.1 稳态性能4.1.2 动态性能4.2 控制器设计方法4.2.1 比例积分微分(PID)控制器4.2.2 状态反馈控制器4.2.3 观测器设计4.3 小结第五章:非线性控制系统理论5.1 非线性系统的基本概念5.2 非线性方程与非线性微分方程5.3 非线性系统的状态空间描述5.4 非线性系统的稳定性分析5.5 小结第六章:非线性控制系统的性能分析与设计6.1 非线性性能指标6.2 非线性控制器设计方法6.2.1 反馈线性化方法6.2.2 滑模控制方法6.2.3 神经网络控制方法6.3 小结第七章:鲁棒控制理论7.1 鲁棒控制的概念与意义7.2 鲁棒控制的设计方法7.2.1 定义1-范数方法7.2.2 H∞控制方法7.2.3 μ-综合方法7.3 小结第八章:自适应控制理论8.1 自适应控制的概念与意义8.2 自适应控制的设计方法8.2.1 模型参考自适应控制8.2.2 适应律与自适应律8.2.3 自适应控制器的设计步骤8.3 小结第九章:现代控制理论在工程应用中的案例分析9.1 工业过程控制中的应用9.2 控制中的应用9.3 航空航天领域的应用9.4 小结第十章:总结与展望10.1 现代控制理论的主要成果与贡献10.2 现代控制理论的发展趋势10.3 面向未来的控制挑战与机遇10.4 小结重点和难点解析重点环节一:第二章中向量与矩阵、复数与复矩阵、拉普拉斯变换与Z变换的数学基础。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 控制理论的应用领域第二章:控制系统数学模型2.1 连续控制系统数学模型2.2 离散控制系统数学模型2.3 状态空间描述2.4 系统矩阵的性质与运算第三章:线性系统的时域分析3.1 系统的稳定性3.2 系统的瞬时性3.3 系统的稳态性能3.4 系统的动态性能第四章:线性系统的频域分析4.1 频率响应的概念4.2 频率响应的性质4.3 系统频率响应的求取方法4.4 系统频域性能指标第五章:线性系统的校正与设计5.1 系统校正的基本概念5.2 常用校正器及其特性5.3 系统校正的方法5.4 系统校正实例分析第六章:非线性控制系统分析6.1 非线性系统的基本概念6.2 非线性系统的数学模型6.3 非线性系统的稳定性分析6.4 非线性系统的控制策略第七章:状态反馈与观测器设计7.1 状态反馈控制的基本原理7.2 状态反馈控制器的设计方法7.3 观测器的设计与分析7.4 状态反馈控制系统应用实例第八章:先进控制策略8.1 鲁棒控制8.2 自适应控制8.3 最优控制8.4 智能控制第九章:最优控制理论9.1 最优控制的基本概念9.2 线性二次调节器(LQR)9.3 离散时间最优控制9.4 最优控制的应用第十章:现代控制理论在工程应用10.1 现代控制理论在自动化领域的应用10.2 现代控制理论在控制中的应用10.3 现代控制理论在航空航天领域的应用10.4 现代控制理论在其他领域的应用第十一章:鲁棒控制理论11.1 鲁棒控制的基本概念11.2 鲁棒控制的设计方法11.3 鲁棒控制的应用实例11.4 鲁棒控制在实际系统中的性能评估第十二章:自适应控制理论12.1 自适应控制的基本概念12.2 自适应控制的设计方法12.3 自适应控制的应用实例12.4 自适应控制在复杂系统中的应用与挑战第十三章:数字控制系统设计13.1 数字控制系统的概述13.2 数字控制器的设计方法13.3 数字控制系统的仿真与实验13.4 数字控制系统在实际应用中的案例分析第十四章:控制系统中的计算机辅助设计14.1 计算机辅助设计的基本概念14.2 控制系统CAD工具与方法14.3 基于软件的控制系统设计与仿真14.4 控制系统CAD在现代工程中的应用案例第十五章:现代控制理论的前沿与发展15.1 现代控制理论的最新研究动态15.2 控制理论与其他领域的交叉融合15.3 未来控制理论的发展趋势15.4 控制理论在解决现实世界问题中的潜力与挑战重点和难点解析本《现代控制理论》教案大纲涵盖了现代控制理论的基本概念、方法与应用,分为十五个章节。
《现代控制理论》课程教案第一章:绪论1.1 课程简介介绍《现代控制理论》的课程背景、意义和目的。
解释控制理论在工程、科学和工业领域中的应用。
1.2 控制系统的基本概念定义控制系统的基本术语,如系统、输入、输出、反馈等。
解释开环系统和闭环系统的区别。
1.3 控制理论的发展历程概述控制理论的发展历程,包括经典控制理论和现代控制理论。
介绍一些重要的控制理论家和他们的贡献。
第二章:数学基础2.1 线性代数基础复习向量、矩阵和行列式的基本运算。
介绍矩阵的特殊类型,如单位矩阵、对角矩阵和反对称矩阵。
2.2 微积分基础复习微积分的基本概念,如极限、导数和积分。
介绍微分方程和微分方程的解法。
2.3 复数基础介绍复数的基本概念,如复数代数表示、几何表示和复数运算。
解释复数的极坐标表示和欧拉公式。
第三章:控制系统的基本性质3.1 系统的稳定性定义系统的稳定性,并介绍判断稳定性的方法。
解释李雅普诺夫理论在判断系统稳定性中的应用。
3.2 系统的可控性定义系统的可控性,并介绍判断可控性的方法。
解释可达集和可观集的概念。
3.3 系统的可观性定义系统的可观性,并介绍判断可观性的方法。
解释观测器和状态估计的概念。
第四章:线性系统的控制设计4.1 状态反馈控制介绍状态反馈控制的基本概念和设计方法。
解释状态观测器和状态估计在控制中的应用。
4.2 输出反馈控制介绍输出反馈控制的基本概念和设计方法。
解释输出反馈控制对系统稳定性和性能的影响。
4.3 比例积分微分控制介绍比例积分微分控制的基本概念和设计方法。
解释PID控制在工业控制系统中的应用。
第五章:非线性控制理论简介5.1 非线性系统的特点解释非线性系统的定义和特点。
介绍非线性系统的常见类型和特点。
5.2 非线性控制理论的方法介绍非线性控制理论的基本方法,如反馈线性化和滑模控制。
解释非线性控制理论在实际应用中的挑战和限制。
5.3 案例研究:倒立摆控制介绍倒立摆控制系统的特点和挑战。
解释如何应用非线性控制理论设计倒立摆控制策略。