第一课用MATLAB分析状态空间模型
- 格式:ppt
- 大小:596.53 KB
- 文档页数:18

标题:MATLAB状态空间表达式的解析一、概述MATLAB是一种非常常用的数学软件,用于分析、设计和模拟动态系统。
在控制系统理论中,状态空间表达式是描述线性系统动态行为的重要方法。
本文旨在介绍如何使用MATLAB对状态空间表达式进行解析和分析。
二、状态空间表达式简介状态空间表达式是一种描述线性时不变系统的数学模型。
通常由状态方程和输出方程组成。
状态方程描述了系统的演化规律,而输出方程则描述了系统状态和输出之间的关系。
三、MATLAB中的状态空间表示在MATLAB中,状态空间表示可以使用ss函数进行表达。
该函数的输入参数包括系统的状态方程系数矩阵A、输入矩阵B、输出矩阵C 和前馈矩阵D。
四、求解状态空间表达式1. 稳态响应分析在MATLAB中,可以使用sys = ss(A,B,C,D)定义一个状态空间模型,然后使用step(sys)绘制系统的阶跃响应曲线。
通过阶跃响应曲线可以分析系统的稳态性能。
2. 传递函数表示使用tf(sys)可以将状态空间表示转换为传递函数表示,这样可以更方便地分析系统的特性。
3. 稳定性分析使用eig(A)可以计算状态方程系数矩阵A的特征值,从而判断系统的稳定性。
如果系统的所有特征值都是负实数,那么系统是稳定的。
4. 频域特性分析使用bode(sys)可以绘制系统的频率响应曲线,这样可以分析系统在不同频率下的特性。
五、应用实例以电机控制系统为例,假设系统的状态空间表达式为:A = [-2 -1; 3 -4]B = [1; 0]C = [0 1]D = [0]可以使用以下代码在MATLAB中求解该系统:sys = ss(A,B,C,D)step(sys)tf_sys = tf(sys)eig(A)bode(sys)六、结语本文介绍了MATLAB中状态空间表达式的解析方法,并以电机控制系统为例进行了说明。
希望本文能够帮助读者更好地理解和应用状态空间表达式在MATLAB中的求解方法。
MIMO传递函数转化为状态空间模型Matlab代码1. 介绍MIMO(多输入多输出)系统是指系统具有多个输入和多个输出的特性。
在控制系统领域中,MIMO系统的建模和分析是非常重要的。
传递函数和状态空间模型是两种常用的系统建模方法。
本文将介绍如何将MIMO系统的传递函数转化为状态空间模型,并给出相应的Matlab代码实现。
2. MIMO系统的传递函数表示MIMO系统的传递函数通常表示为一个矩阵,每个元素对应一个输入到一个输出的传递函数。
假设有n个输入、m个输出,则MIMO系统的传递函数可以表示为一个m×n的传递函数矩阵G(s)。
传递函数矩阵的元素可以用s表示,如G11(s)、G12(s)等。
3. MIMO系统传递函数到状态空间模型的转化方法MIMO系统的传递函数可以通过状态空间模型来表示。
状态空间模型的基本形式如下:\[ \dot{x}(t) = Ax(t) + Bu(t) \]\[ y(t) = Cx(t) + Du(t) \]其中,A是状态矩阵,B是输入矩阵,C是输出矩阵,D是传递函数零极点对应的矩阵。
MIMO系统的传递函数可以通过以下步骤转化为状态空间模型:1)将传递函数矩阵分解为多个SISO(单输入单输出)系统的传递函数;2)针对每个SISO系统,可以将其转化为状态空间模型;3)将各个SISO系统的状态空间模型组合成一个整体的MIMO系统的状态空间模型。
4. Matlab代码实现下面我们通过一个实例来演示如何用Matlab将MIMO系统的传递函数转化为状态空间模型。
假设传递函数矩阵为:\[ G(s) = \begin{bmatrix} \frac{2s+1}{s^2+3s+2}\frac{3s+2}{s^2+4s+3} \\ \frac{4s+1}{s^2+2s+1}\frac{5s+2}{s^2+3s+2} \end{bmatrix} \]我们需要将传递函数矩阵分解为四个SISO系统的传递函数:\[ G11(s) = \frac{2s+1}{s^2+3s+2} \]\[ G12(s) = \frac{3s+2}{s^2+4s+3} \]\[ G21(s) = \frac{4s+1}{s^2+2s+1} \]\[ G22(s) = \frac{5s+2}{s^2+3s+2} \]针对每个SISO系统,我们可以将其转化为状态空间模型,以G11(s)为例:```Matlab将传递函数G11(s)转化为状态空间模型num = [2, 1]; 分子系数den = [1, 3, 2]; 分母系数[A11, B11, C11, D11] = tf2ss(num, den); 转化为状态空间模型```将各个SISO系统的状态空间模型组合成整体的MIMO系统的状态空间模型:```Matlab对四个SISO系统的状态空间模型进行组合A = [A11, A12; A21, A22];B = [B11, B12; B21, B22];C = [C11, C12; C21, C22];D = [D11, D12; D21, D22];```至此,我们成功地将MIMO系统的传递函数转化为状态空间模型,并通过Matlab代码实现了这一过程。
实验一 MATLAB 系统的传递函数和状态空间表达式的转换一、实验目的1、学习多变量系统状态空间表达式的建立方法;2、通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数之间相互转换的方法;3、掌握相应的MATLAB 函数。
二、实验原理设系统的模型如式(1.1)所示:⎩⎨⎧+=+=DCx y BuAx x ' x ''R ∈ u ∈R ’’’ y ∈R P (1.1) 其中A 为nXn 维系统矩阵、B 为nXm 维输入矩阵、C 为pXn 维输出矩阵,D 为直接传递函数。
系统的传递函数和状态空间表达式之间的关系如式(1.2)所示G(s)=num(s)/den(s)=C (SI-A)-1 B+D (1.2) 式(1.2)中,num(s)表示传递函数的分子阵,其维数是pXm ,den(s)表示传递函数的按s 降幂排列的分母。
表示状态空间模型和传递函数的MATLAB 函数如下:函数ss (state space 的首字母)给出了状态空间模型,其一般形式是: sys=ss(A,B,C,D)函数tf (transfer function 的首字母)给出了传递函数,其一般形式是: G=tf(num ,den)其中num 表示传递函数中分子多项式的系数向量(单输入单输出系统),den 表示传递函数中分母多项式的系数向量。
函数tf2ss 给出了传递函数的一个状态空间实现,其一般形式是: [A,B,C,D]=tf2ss(num,den)函数ss2tf 给出了状态空间模型所描述系统的传递函数,其一般形式是: [num,den]=ss2tf(A,B,C,D,iu)其中对于多输入系统,必须确定iu 的值。
例如,若系统有三个输入u 1,u 2,u 3,则iu 必须是1、2、或3,其中1表示u 1,2表示u 2,3表示u 3。
该函数的结果是第iu 个输入到所有输出的传递函数。
三.实验步骤及结果1、应用MATLAB 对下列系统编程,求系统的A 、B 、C 、D 阵,然后验证传递函数是相同的。
昆明理工大学机电学院机械工程专业研究生实验《现代控制工程》MATLA实验指导书昆明理工大学机电工程学院现代控制工程》MATLAB 实验指导书一、MATLAB 简介1 MATLAB 概述MATLAB 是MA Trix LABoratory 的缩写,早期主要用于现代控制中复杂的矩阵、向量的各种运算。
由于MA TLAB 提供了强大的矩阵处理和绘图功能,很多专家因此在自己擅长的领域用它编写了许多专门的MATLAB 工具包( toolbox ),如控制系统工具包( control systems toolbox );系统辨识工具包( system identification toolbox );信号处理工具包( signal processing toolbox );鲁棒控制工具包( robust control toolbox );最优化工具包(optimization toolbox )等等。
由于MA TLAB 功能的不断扩展,所以现在的MATLAB 已不仅仅局限与现代控制系统分析和综合应用,它已是一种包罗众多学科的功能强大的“技术计算语言( TheLanguage of Technical Computing )”。
MathWorks 公司于1992 年推出了具有划时代意义的MATLAB 4.0 版本,并推出了交互式模型输入与仿真系统SIMULINK ,它使得控制系统的仿真与CAD 应用更加方便、快捷,用户可以方便地在计算机上建模和仿真实验。
1997 年MathWorks 推出的MA TLAB 5.0 版允许了更多的数据结构,1999 年初推出的MA TLAB 5.3 版在很多方面又进一步改进了MATLAB 语言的功能。
2000 年底推出的MATLAB 6.0 。
最新版本是MA TLAB7.0 。
MATLAB 以矩阵作为基本编程单元,它提供了各种矩阵的运算与操作,并有较强的绘图功能。
MATLAB 集科学计算、图像处理、声音处理于一身,是一个高度的集成系统,有良好的用户界面,并有良好的帮助功能。
现代控制理论第一次上机实验报告实验三 利用MATLAB 求取状态空间模型的相似变换及其标准型、控制系统的不同状态模型实现实验目的:1、通过实验掌握线性系统的对角线标准型、约旦标准型、模态标准型以及伴随矩阵标准型的表示及相应变换阵的求解;2、通过编程、上机调试,掌握系统可控性和可观测性的判别方法、系统的可控性和可观测性分解等;3、加深理解由控制系统传递函数建立能控、能观、约当标准型等不同状态模型的方法。
实验要求:1.实现同一系统传递函数的状态模型是唯一的吗?2.系统传递函数除上面三种不同状态模型实现外,常见的还有串连实现,对否?3.对于上述系统传递函数,其输出稳态值与输入阶跃信号幅值有何关系? 实验步骤:1. 根据所给系统的已知条件(可自行参阅选择刘豹教材中的例题或习题),如传递函数、零极点模型或(A 、B 、C 、D ),实现状态空间模型之间的相似变换、写出其对角线标准型、约当标准型、模态标准型以及伴随矩阵标准型的表示及求解相应变换阵,采用MATLAB 的相关函数编写m-文件。
已知系统的传递函数如下:3211()(1)( 2.5)(5)8.52012.5160.270.11 2.55G s s s s s s s s s s ==++++++-=+++++运行如下m-文件,得到传递函数的状态空间模型:num=[0 0 0 1];den=[1 8.5 20 12.5];[A,B,C,D]=tf2ss(num,den)得到A =-8.5000 -20.0000 -12.50001.0000 0 00 1.0000 0B =1C =0 0 1D =因此,传递函数的一个状态空间实现是G=ss(A,B,C,D);(1)对角线标准型:计算矩阵A的特征值及与特征值对应的对角型变换矩阵D的m-如下:[V,D]=eig(A)[V,D]=eig(A)V =-0.9798 0.9184 0.57740.1960 -0.3674 -0.5774-0.0392 0.1469 0.5774D =-5.0000 0 00 -2.5000 00 0 -1.0000由对角线标准型的变换阵D,运行下列m-文件的到对角线标准型矩阵系数:G1=ss2ss(G,D)a =x1 x2 x3x1 -8.5 -40 -62.5x2 0.5 0 0x3 0 0.4 0b =u1x1 -5x2 0x3 0c =x1 x2 x3y1 0 0 -1d =u1y1 0Continuous-time model.由上可得,对角线标准型:对角型变换矩阵为:(2)约旦标准型:计算矩阵A变换为约当标准型J,并得到变换矩阵V,运行下列m-文件:>> [V,J]=jordan(A)V =2.5000 -1.6667 0.1667-0.5000 0.6667 -0.16670.1000 -0.2667 0.1667J =-5.0000 0 00 -2.5000 00 0 -1.0000根据得到的约当标准型的变换矩阵V,运行下列文件得到约当标准型的矩阵系数:G1=ss2ss(G,V)a =x1 x2 x3x1 -104 -613.6 -697.1x2 21 123.1 139.6x3 -4.2 -24.28 -27.58b =u1x1 2.5x2 -0.5x3 0.1c =x1 x2 x3y1 1 7.5 12.5d =u1y1 0Continuous-time model由上可得,约旦标准型:约旦标准型的变换矩阵为:(3)模态标准型运行以下m-程序可得到模态标准型系数矩阵和其变换矩阵:>> [G1,V]=canon(G,'modal')a =x1 x2 x3x1 -5 0 0x2 0 -2.5 0x3 0 0 -1b =u1x1 -0.825x2 -0.95x3 0.375c =x1 x2 x3y1 -0.1212 0.2807 0.4444d =u1y1 0Continuous-time model.V =-0.8250 -2.8875 -2.0625-0.9500 -5.7000 -4.75000.3750 2.8125 4.6875由上可得,模态标准型:模态标准型的变换矩阵为:(4)伴随矩阵标准型运行以下m-程序可得到伴随矩阵标准型系数矩阵和其变换矩阵:>> [G1,V]=canon(G,'companion')a =x1 x2 x3x1 0 0 -12.5x2 1 0 -20x3 0 1 -8.5b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 0 1d =u1y1 0Continuous-time model.V =1.0000 8.5000 20.00000 1.0000 8.50000 0 1.0000由上可得,伴随矩阵标准型:模态标准型的变换矩阵为:2.根据所给系统的已知条件(可自行参阅选择刘豹教材中的例题或习题),如(A、B、C、D)模型,判断其可控性和可观测性并进行可控性和可观测性分解。
matlab ss指令
在MATLAB中,ss指令用于创建一个状态空间模型对象。
状态空间模型是一种描述动态系统的数学模型,它由状态方程和输出方程组成。
通过使用ss指令,您可以定义系统的状态变量、输入变量、输出变量和系统矩阵,然后使用这些信息来分析系统的动态行为。
以下是使用ss指令创建状态空间模型的示例代码:
matlab复制代码
% 定义系统矩阵
A = [0 1; -2 -3];
B = [0; 1];
C = [1 0];
D = 0;
% 创建状态空间模型对象
sys = ss(A, B, C, D);
在上面的示例中,A是状态矩阵,B是输入矩阵,C是输
出矩阵,D是直接矩阵。
这些矩阵描述了系统的动态行为。
通过将这些矩阵传递给ss指令,您可以创建一个状态空间
模型对象sys。
一旦创建了状态空间模型对象,您可以使用MATLAB的
各种工具和函数来分析系统的性能、稳定性、频率响应等。
例如,您可以使用step函数模拟系统的阶跃响应,使用bo de函数绘制系统的频率响应等。
请注意,ss指令只是创建状态空间模型对象的一种方式。
MATLAB还提供了其他函数和方法来创建和分析状态空间模型,具体取决于您的需求和使用的MATLAB版本。
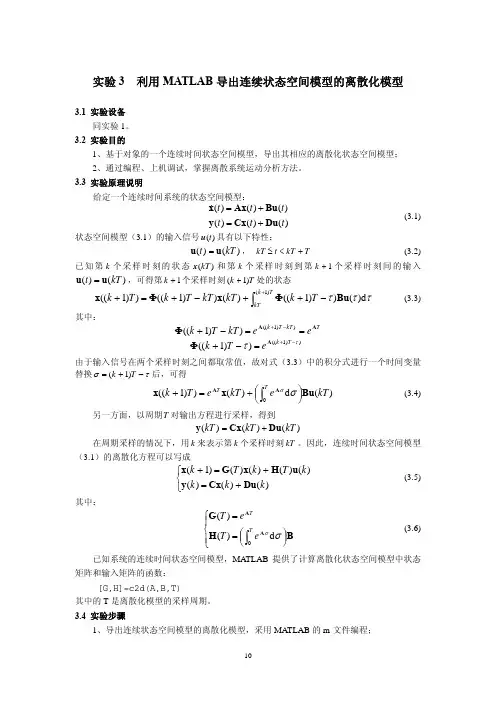
实验3 利用MATLAB 导出连续状态空间模型的离散化模型3.1 实验设备同实验1。
3.2 实验目的1、基于对象的一个连续时间状态空间模型,导出其相应的离散化状态空间模型;2、通过编程、上机调试,掌握离散系统运动分析方法。
3.3 实验原理说明给定一个连续时间系统的状态空间模型:)()()()()()(t t t t t t Du Cx y Bu Ax x +=+=& (3.1) 状态空间模型(3.1)的输入信号具有以下特性:)(t u )()(kT t u u =, (3.2)T kT t kT +<≤已知第个采样时刻的状态和第k 个采样时刻到第)(kT x k 1+k 个采样时刻间的输入,可得第个采样时刻)()(kT t u u =T k )(+1处的状态1+k ∫+−++−+=+T k kT T k kT kT T k T k )1(d )())1(()())1(())1((τττBu Φx Φx (3.3)其中: T kT T k e e kT T k A A Φ==−+−+))1(())1(())1(())1((ττ−+=−+T k e T k A Φ由于输入信号在两个采样时刻之间都取常值,故对式(3.3)中的积分式进行一个时间变量替换τσ−+=T k )1(后,可得)(d )())1((0kT e kT e T k T T Bu x x A A ⎟⎠⎞⎜⎝⎛+=+∫σσ (3.4) 另一方面,以周期T 对输出方程进行采样,得到)()()(kT kT kT Du Cx y +=在周期采样的情况下,用来表示第k 个采样时刻kT 。
因此,连续时间状态空间模型(3.1)的离散化方程可以写成k ⎩⎨⎧+=+=+)()()()()()()()1(k k k k T k T k Du Cx y u H x G x (3.5) 其中:⎪⎩⎪⎨⎧⎟⎠⎞⎜⎝⎛==∫B H G A A T Te T e T 0d )()(σσ (3.6) 已知系统的连续时间状态空间模型,MATLAB 提供了计算离散化状态空间模型中状态矩阵和输入矩阵的函数:[G,H]=c2d(A,B,T)其中的T 是离散化模型的采样周期。
现代控制理论实验报告学院专业班级姓名指导教师年月日基于MATLAB的控制系统状态空间分析一、实验目的1、根据线性定常系统的微分方程或传递函数阵,通过MATLAB函数实现其状态空间表达式;2、将线性定常系统状态空间表达式转化为传递函数阵;3、通过MATLAB命令实现状态方程的求解;4、通过线性变换将状态空间表达式转化为对角标准型和约当标准型。
二、实验原理1、状态空间表达式建立与状态方程求解:运用适当的MATLAB指令语言可求得状态空间表达式或是传递函数以及状态方程求解,其过程比人工计算简单得多,而且结果准确,从而大降低了了人工计算的失误率;2、线性变换:若A的特征值没有重根,则可以将A变换为对角阵,变换矩阵为每个特征值对应特征向量所组成的矩阵;若矩阵A的n个特征值中有重特征值时,可分为两种情况。
一般情况是,有特征值,但矩阵A仍有n个独立的特征向量,即每个重特征值所对应的独立特征向量数恰好等于特征值的重数,这时就同没有重特征值的情况一样。
另一种,A有重特征值,矩阵A的独立特征向量个数小于n。
这时不能化为对角形,只能化为约当形。
三、实验题目1、1-5题已知微分方程+5+7+3y=+3+2u, 写其相应的状态空间表达式.2、1-7题给定下列状态空间表达式=+uY=求系统的传递函数。
3、1-9试求下列状态空间表达式的传递函数阵=+u。
4、求下列状态空间表达式的解:=x+u,Y=,初始状态x=,输入u是单位阶跃函数。
四、实验内容题目1:函数程序:num=[1,3,2];den=[1,5,7,3];[A,B,C,D]=tf2ss(num,den)执行结果:A =-5 -7 -31 0 00 1 0B =1C =1 3 2D =题目2:解输入Matlab 语句如下:A=[0 1 0;-2 -3 0;-1 1 -3];B=[0;1;2];C=[0 0 1];D=[0];执行结果:[num,den]=ss2tf(A,B,C,D)num =0 2.0000 7.0000 3.0000den =1 6 11 6所以由此可得系统的传递函数为=题目3:函数程序:syms s;A=[4 1 2;1 0 2;1 -1 3];B=[3 1;2 7;5 3];C=[1 2 0;0 1 1];D=[0];F=inv(s*eye-A)G=simple(simple(C*F*B)+D)执行结果:F =[ -2/5, (3*s - 5)/(5*(s - 1)), -(s - 2)/(5*(s - 1))] [ 1/5, -(4*s - 10)/(5*(s - 1)), (3*s - 6)/(5*(s - 1))] [ 1/5, (s + 5)/(5*(s - 1)), -(2*s + 1)/(5*(s - 1))] G =[ 3 - 1/(s - 1), 11/(s - 1) - 4][ 1 - 6/(5*(s - 1)), 66/(5*(s - 1)) - 16/5]题目4:函数程序:syms s t x0 tao phi phi0;A=[0 1;0 0];B=[0;1];I=[1 0;0 1];E=s*I-A;C=det(E);D=collect(inv(E));phio=ilaplace(D);x0=[1;1];x1=phio*x0;phi=subs(phio,'t',(t-tao));F=phi*B*1;x2=int(F,tao,0,t);x=collect(x1+x2)执行结果:x =t^2/2 + t + 1t + 1可得相应的输出为:Y=x=+t+1五、实验总结通过本次实验课,我熟练的掌握了用MATLAB软件在已知传递函数的条件下,求状态空间表达式。
在Matlab中进行模拟系统建模与仿真简介MATLAB(Matrix laboratory)是一种高级计算环境和编程语言,广泛用于工程、科学和数学领域的数据分析、可视化和算法开发。
在MATLAB中,我们可以使用各种工具箱和功能来进行系统建模和仿真。
本文将介绍一些MATLAB中进行模拟系统建模与仿真的方法和技巧,以帮助读者更好地理解和应用这个强大的工具。
一、系统建模1. 确定系统的输入和输出在进行系统建模之前,首先要明确系统的输入和输出。
系统的输入是指进入系统的外部信号或变量,而系统的输出是指系统产生的响应或结果。
了解系统的输入和输出有助于我们理解系统的工作原理并进行模型构建。
2. 建立传递函数模型传递函数模型是系统建模中常用的一种数学模型。
它通过输入和输出之间的关系来描述系统的动态行为。
在MATLAB中,我们可以使用tf函数来建立传递函数模型。
例如,假设有一个二阶系统,可以通过以下代码建立其传递函数模型:```matlabnum = [1];den = [1, 1, 1];sys = tf(num, den);```3. 建立状态空间模型状态空间模型是描述系统动态行为的另一种常用模型。
它通过系统的状态变量和输入之间的关系来表示系统的行为。
在MATLAB中,我们可以使用ss函数来建立状态空间模型。
例如,假设有一个二阶系统,可以通过以下代码建立其状态空间模型:```matlabA = [0, 1; -1, -1];B = [0; 1];C = [1, 0];D = 0;sys = ss(A, B, C, D);```二、系统仿真1. 时域仿真时域仿真是通过对系统输入信号进行时间积分来模拟系统的行为。
在MATLAB中,我们可以使用sim函数来进行时域仿真。
例如,假设有一个输入信号u和一个系统sys,可以通过以下代码进行时域仿真:```matlabt = 0:0.01:10; % 时间范围u = sin(t); % 输入信号[y, t] = sim(sys, t, u); % 仿真结果```2. 频域仿真频域仿真是通过对系统输入信号进行傅里叶变换,并与系统的传递函数进行频域计算来模拟系统的行为。
Matlab中的空间几何分析与三维建模引言:Matlab作为一种功能强大的科学计算软件,在众多学科领域都有着广泛的应用。
本文将主要讨论Matlab在空间几何分析与三维建模方面的应用,介绍一些常用的函数和技巧,以及如何利用Matlab进行三维物体的建模和可视化。
一、点、线和平面的表示与计算在进行空间几何分析时,最基本的元素是点、线和平面。
Matlab中提供了一些函数用于点、线和平面的表示和计算。
1.1 点的表示与计算在Matlab中,可以使用二维或三维坐标来表示点。
二维坐标使用一个包含两个元素的向量表示,三维坐标使用一个包含三个元素的向量表示。
例如,点A(2, 3)可以表示为A = [2, 3],而点B(1, 2, 3)可以表示为B = [1, 2, 3]。
对于点的计算,Matlab提供了一些相关函数。
例如,可以使用dist函数计算两点之间的距离,使用dot函数计算两点之间的内积,使用cross函数计算两点之间的叉积等等。
1.2 线的表示与计算在Matlab中,可以使用两点或一个点和一个向量来表示线。
两点之间的线可以使用一个包含两个点的矩阵表示,例如,线AB可以表示为AB = [A; B]。
一个点和一个向量可以表示一条直线,例如,点A(2, 2)并且向量v(1, 1)可以表示为AL = [A; v]。
对于线的计算,Matlab提供了一些相关函数。
例如,可以使用norm函数计算线的长度,使用dot函数计算线和向量之间的内积,使用cross函数计算线和向量之间的叉积等等。
1.3 平面的表示与计算在Matlab中,可以使用一个点和一个法向量来表示平面。
对于平面的计算,Matlab提供了一些相关函数。
例如,可以使用projectPointOnPlane函数将一个点投影到平面上,使用isCoplanar函数判断一个点是否在平面上,使用angleBetweenPlanes函数计算两个平面之间的夹角等等。
二、三维物体的表示与建模在Matlab中,可以使用三角面片或体素来表示三维物体。
MATLAB空间面板数据模型操作简介MATLAB安装:在民主湖资源站上下载MATLAB 2009a,或者2010a,按照其中的安装说明安装MATLAB.(MATLAB较大,占用内存较大,安装的话可能也要花费一定的时间)一、数据布局:首先我们说一下MATLAB处理空间面板数据时,数据文件是怎么布局的,熟悉eviews的同学可能知道,eviews中面板数据布局是:一个省份所有年份的数据作为一个单元(纵截面:一个时间序列),然后再排放另一个省份所有年份的数据,依次将所有省份的数据排放完,如下图,红框中“1-94”“1-95”“1-96”“1—97”中,1是省份的代号,94,95,96,97表示年份,eviews是将每个省份的数据放在一起,再将所有省份堆放在一起。
与eviews不同,MATLAB处理空间面板数据时,面板数据的布局是(在excel中说明):先排放一个横截面上的数据(即某年所有省份的数据),再将不同年份的横截面按时间顺序堆放在一起。
如图:这里需要说明的是,MATLAB中省份的序号需要与空间权重矩阵中省份一一对应,我们一般就采用《中国统计年鉴》分地区数据中省份的排列顺序。
(二阶空间权重矩阵我会在附件中给出)。
二、数据的输入:MATLAB与excel链接:在excel中点击“工具→加载宏→浏览”,找到MATLAB的安装目录,一般来说,如果安装时没有修改安装路径,此安装目录为:C:\Programfiles\MATLAB\R2009a\toolbox\exlink,点击excllink.xla即可完成excel与MATLAB的链接。
这样的话excel中的数据就可以直接导入MATLAB中形成MATLAB的数据文件。
操作完成后excel的加载宏界面如图:选中“Spreadsheet Link EX3.0。
3 for use with MATLAB”即表示我们希望excel 与MATLAB实现链接。
点击确定后,excel窗口如图:红色框内选项为:startMATLAB:表示打开MATLAB,一般来说,如果excel实现了与MATLAB的链接,当我们打开excel 时,excel会自动启动MATLAB,所以excel的打开速度很慢.Putmatrix:表示将excel中的数据输入MATLAB中,我们经常用的就是此项,选中需要导入到MATLAB 中的数据(就是一个矩阵),点击putmatrix即可。
用MATLAB分析状态空间模型状态空间模型是一种用于描述动态系统的数学模型。
在MATLAB中,可以使用状态空间方法对系统进行分析和控制。
本文将从状态空间模型的定义、矩阵表示、稳定性以及控制器设计等方面进行详细介绍。
一、状态空间模型的定义状态空间模型是一种描述动态系统的数学模型,其中系统的行为是通过状态变量的演化来表示的。
状态空间模型通常由一组一阶微分方程表示,形式如下:dx(t)-------------------=Ax(t)+Bu(t)dty(t)=Cx(t)+Du(t)其中,x(t)是状态变量向量,表示系统的内部状态;u(t)是输入向量,表示对系统的外部输入;y(t)是输出向量,表示观测到的系统输出;A、B、C和D分别是系统的状态矩阵、输入矩阵、输出矩阵和直接传递矩阵。
二、状态空间模型的矩阵表示在MATLAB中,可以使用矩阵表示状态空间模型。
假设有一个由状态变量x、输入变量u和输出变量y组成的系统,可以通过矩阵表示如下:x'=Ax+Buy=Cx+Du其中,x'表示状态变量x的导数。
在MATLAB中,可以使用matrix函数创建状态矩阵A、输入矩阵B、输出矩阵C和直接传递矩阵D。
例如,可以使用如下代码定义一个状态空间模型:A=[12;34];B=[1;1];C=[10];D=0;sys = ss(A, B, C, D);在上述代码中,创建了一个状态空间模型sys,其中状态矩阵A是一个2×2的矩阵,输入矩阵B是一个2×1的矩阵,输出矩阵C是一个1×2的矩阵,直接传递矩阵D是一个标量。
三、状态空间模型的稳定性分析在控制系统设计中,稳定性是一个重要的指标。
对于线性时不变系统,可以使用状态空间模型进行稳定性分析。
MATLAB提供了一些函数用于稳定性分析,如eig、pole和isstable等。
eig函数用于计算系统的特征值,特征值的实部决定了系统的稳定性。
一、概述Matlab是一种流行的数学软件,可以用于数据分析、图形绘制、模拟和建模等多种领域。
在控制系统工程中,建立系统模型是非常重要的一部分,而状态空间和传递函数是两种描述系统动态特性的常用方法。
本文将介绍如何在Matlab中进行状态空间到传递函数的转换,以及该过程的具体步骤和应用。
二、状态空间模型1.状态空间模型的表示状态空间模型是描述线性时不变系统动态特性的一种数学模型。
它通常表示为矩阵形式:x' = Ax + Buy = Cx + Du其中,x是系统的状态变量,u是输入,y是输出,A、B、C、D分别是系统的状态方程和输出方程的系数矩阵。
2.状态空间模型在Matlab中的表示在Matlab中,可以使用矩阵的形式来表示状态空间模型。
可以使用以下代码定义一个状态空间模型:A = [1 2; 3 4];B = [5; 6];C = [7 8];D = 9;sys = ss(A, B, C, D);其中,A、B、C、D分别是状态空间模型的系数矩阵,sys是表示状态空间模型的对象。
三、传递函数模型1.传递函数模型的表示传递函数模型是描述系统输入与输出之间关系的一种数学模型。
它通常表示为分子多项式和分母多项式的比值:G(s) = N(s) / D(s)其中,N(s)和D(s)分别是分子多项式和分母多项式。
2.传递函数模型在Matlab中的表示在Matlab中,可以使用tf函数来定义一个传递函数模型。
可以使用以下代码定义一个传递函数模型:num = [1 2];den = [3 4 5];sys = tf(num, den);其中,num和den分别是传递函数模型的分子多项式和分母多项式,sys是表示传递函数模型的对象。
四、状态空间到传递函数的转换在Matlab中,可以使用tf函数将状态空间模型转换为传递函数模型。
具体步骤如下:1. 使用ss2tf函数将状态空间模型转换为传递函数的分子多项式和分母多项式。
文章主题:探索 Matlab 中的状态空间矩阵符号计算在探讨 Matlab 中的状态空间矩阵符号计算之前,让我们先来了解一下状态空间模型的基本概念。
状态空间模型是描述动态系统行为的一种数学模型,它通常由状态方程和观测方程组成。
状态方程描述了系统状态随时间的演化规律,而观测方程则描述了系统状态和可观测变量之间的关系。
通过状态空间模型,我们可以对系统的动态行为进行分析和预测,因此在控制系统、信号处理、通信等领域都有着广泛的应用。
在 Matlab 中,我们可以使用 Symbolic Math Toolbox 来进行状态空间矩阵的符号计算。
这为我们提供了在状态空间模型中进行符号运算和分析的方便途径,帮助我们更深入地理解系统的动态特性和行为规律。
接下来,让我们从简到繁地探讨 Matlab 中的状态空间矩阵符号计算。
1. 简介在 Matlab 中,我们可以使用 sym 函数创建符号变量,并利用这些符号变量进行符号运算。
在状态空间矩阵中,通常会涉及到符号矩阵的乘法、加法、逆矩阵等运算,通过 Symbolic Math Toolbox,我们可以轻松地实现这些符号计算。
2. 符号变量的创建我们可以使用 sym 函数来创建符号变量,比如:```matlabsyms s```这将创建一个符号变量 s,我们可以利用这个符号变量来定义状态空间矩阵。
3. 符号矩阵的定义通过符号变量,我们可以定义符号矩阵。
我们可以定义一个状态空间模型的状态方程和观测方程:```matlabA = sym('A', [2 2]);B = sym('B', [2 1]);C = sym('C', [1 2]);D = sym('D', [1 1]);```这里,A、B、C、D 分别代表状态空间模型中的状态矩阵、输入矩阵、输出矩阵和传递矩阵,它们都是符号矩阵。
4. 状态空间模型的符号计算在定义了符号矩阵之后,我们可以进行状态空间模型的符号计算。
实验一 用MATLAB 分析状态空间模型1、实验设备MATLAB 软件2、实验目的① 学习系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法;② 通过编程、上机调试,掌握系统状态空间表达式与传递函数相互转换方法。
3、实验原理说明用MATLAB 分析状态空间模型4、实验步骤① 根据所给系统的传递函数或A 、B 、C 矩阵,依据系统的传递函数阵和状态空间表达式之间的关系式,采用MATLAB 编程。
② 在MATLAB 界面下调试程序,并检查是否运行正确。
习题1:已知系统的传递函数为(1) 将其输入到MATLAB 工作空间;(2) 获得系统的状体空间模型。
解:在MATLAB 工作空间中输入num=[2];den=[1 6 11 6];G=tf(num,den) G1=ss(G) 322()6116G s s s s =+++得到系统的状态空间模型:num=[2];den=[1 6 11 6];G=tf(num,den)G1=ss(G)[A,B,C,D]=tf2ss(num,den)因此,所考虑传递函数的一个状态空间实现是:1611611210020301030x x x x x x μ---⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪⎪ ⎪=+ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭习题2:已知系统的状态空间模型为(1) 将其输入到MATLAB 工作空间;(2) 求系统的传递函数。
A=[-5 -1;3 -1];B=[2;5];C=[1 2];D=[0];G=ss(A, B, C, D)G1=tf(G)所以系统的传递函数为:G =x1y u x x ]2[521315=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---='12 s + 59 -------------s^2 + 6 s + 8。