行星齿轮变速箱的结构参数与传动比计算
- 格式:pdf
- 大小:91.71 KB
- 文档页数:3
行星齿轮减速器的相关计算行星齿轮减速器是一种常用的机械传动装置,其特点是结构紧凑、承载能力大、传动效率高。
在工程设计和机械计算中,对行星齿轮减速器的相关参数进行计算是必不可少的工作。
本文将详细介绍行星齿轮减速器的相关计算方法。
一、行星齿轮减速器的基本构造二、行星齿轮减速器的传动比计算传动比是指输入轴和输出轴的转速比,可以通过以下公式计算:i=(N_s+N_r)/N_s其中,i为传动比,N_s为太阳齿轮的齿数,N_r为行星齿轮的齿数。
行星齿轮减速器的传动比可以通过调整太阳齿轮和行星齿轮的齿数来实现。
三、行星齿轮减速器的传动效率计算η=(1-δ/100)*(1-ε/100)其中,η为传动效率,δ为齿间损失系数,ε为噪声损失系数。
行星齿轮减速器的传动效率受到齿轮的磨损和摩擦影响,一般情况下,传动效率在95%以上。
四、行星齿轮减速器的扭矩计算输入轴扭矩计算可以通过以下公式计算:T_in = P / (n * η)其中,T_in为输入轴扭矩,P为输出功率,n为输入轴转速,η为传动效率。
输出轴扭矩计算可以通过以下公式计算:T_out = i * T_in其中,T_out为输出轴扭矩,i为传动比,T_in为输入轴扭矩。
五、行星齿轮减速器的选择在实际工程中,选择合适的行星齿轮减速器需要考虑以下因素:1.承载能力:根据实际应用需求,选择承载能力适当的行星齿轮减速器。
2.传动比:根据需要的输出转速和输入转速,选择合适的行星齿轮减速器。
3.外形尺寸:根据实际安装空间,选择符合尺寸要求的行星齿轮减速器。
4.传动效率:选择传动效率高的行星齿轮减速器,以提高传动效率和节能效果。
5.稳定性:选择结构稳定、运行平稳的行星齿轮减速器,以减少振动和噪声。
六、行星齿轮减速器的基本计算流程1.确定输入功率、输入转速和输出转速。
2.根据输入功率和输入转速计算输入轴扭矩。
3.根据输入轴扭矩和传动比计算输出轴扭矩。
4.根据输出轴扭矩和输出转速计算输出功率。
行星齿轮传动比计算公式【最新版】目录1.行星齿轮传动比计算公式的概述2.行星齿轮传动比的计算方法3.行星齿轮传动比的特点4.应用行星齿轮传动比的注意事项正文行星齿轮传动比计算公式是一种在机械传动领域中常用的计算方式,它可以帮助我们准确地计算出行星齿轮传动系统中的传动比。
行星齿轮传动比计算公式的概述如下:行星齿轮传动比是指主动轮(太阳轮)的角速度与从动轮(行星轮)的角速度之比。
在行星齿轮传动系统中,太阳轮通过行星轮向外界输出动力,因此,行星齿轮传动比的计算至关重要。
它可以帮助我们了解传动系统的工作状态,以及调整传动系统中的参数,以达到最佳的工作效果。
行星齿轮传动比的计算方法如下:假设太阳轮的齿数为 Z1,行星轮的齿数为 Z2,太阳轮的角速度为ω1,行星轮的角速度为ω2。
那么,行星齿轮传动比计算公式可以表示为:传动比 = ω1 / ω2 = Z1 / Z2在实际应用中,行星齿轮传动比通常是瞬时传动比,即太阳轮和行星轮的瞬时角速度比。
但是,在某些特殊情况下,例如当太阳轮和行星轮的转速相同时,瞬时传动比就会变为恒定的平均传动比。
行星齿轮传动比具有以下特点:1.行星齿轮传动比是瞬时传动比,即随太阳轮和行星轮的角速度变化而变化。
2.行星齿轮传动比的计算方法简单,只需要知道太阳轮和行星轮的齿数和角速度即可。
3.行星齿轮传动比可以帮助我们了解传动系统的工作状态,以及调整传动系统中的参数,以达到最佳的工作效果。
应用行星齿轮传动比时,需要注意以下事项:1.确保行星齿轮传动比的计算准确无误,以免影响传动系统的工作效果。
2.根据行星齿轮传动比的计算结果,及时调整传动系统中的参数,以达到最佳的工作效果。
3.注意行星齿轮传动比的变化规律,以便在传动系统出现异常时,及时进行处理。
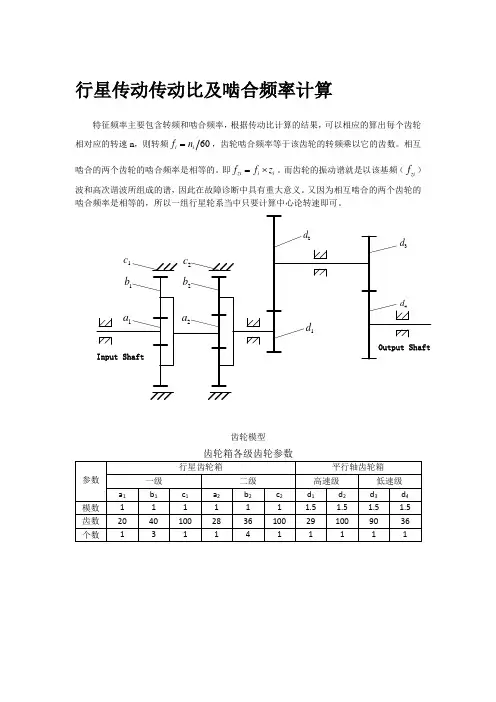
行星传动传动比及啮合频率计算特征频率主要包含转频和啮合频率,根据传动比计算的结果,可以相应的算出每个齿轮相对应的转速n ,则转频60i i f n =,齿轮啮合频率等于该齿轮的转频乘以它的齿数。
相互啮合的两个齿轮的啮合频率是相等的。
即zi i i f f z =⨯。
而齿轮的振动谱就是以该基频(zi f )波和高次谐波所组成的谱,因此在故障诊断中具有重大意义。
又因为相互啮合的两个齿轮的啮合频率是相等的,所以一组行星轮系当中只要计算中心论转速即可。
1a 1b 1c 2a 2b 2c Input ShaftOutput Shaft2d 1d 3d 4d齿轮模型n –输入转速;Za1–第一级太阳轮齿数;Zb1 –第一级行星轮齿数;Zc1–第一级内齿圈齿数; Za2 –第二级太阳轮齿数;Zb2 –第二级行星轮齿数;Zc2 –第二级内齿圈齿数;(1) 一级行星轮系:111111a H c c H a n n z n n z -=-- 其中,n n n a c ==11,0 ,则 )1//(11111+==a c a Hb z z n n n =n 61(2) 二级行星轮系:222222a H c c H a n n zn n z -=--其中,122,0H a c n n n ==,则)1//(22222+==a c a H b z z n n n =2327a n 行星轮系级: 传动比i =192/7 (3)平行轴:中间低速级: 传动比i1= 小大n n =100/29高速级: 传动比i2= 小大n n =2.5 平行轴传动比:i=8.6 总传动比:i=232齿轮箱振动特征频率 1. 啮合频率:1)转速同步频率 n f = n/60 式中,n 为轴转速(转/分)。
2)定轴齿轮啮合频率n f = nz/60 式中,n 为轴转速(转/分), r z 为齿轮齿数。
3)行星轮系,啮合频率用下式计算: m f = a b a c b z f f z f ⨯-=⨯)( 式中,b n 为行星轮架转速(转/分),c z 为内齿圈齿数,a f 为太阳轮转频,a z 为太阳轮齿数。
行星齿轮机构的设计与计算行星齿轮机构是一种广泛应用于机械传动系统中的重要装置,其可以实现高速度、高传动比和高扭矩的传动效果,被广泛应用于工业领域。
本文将从行星齿轮机构的结构设计、传动计算和性能评价三个方面,对其进行详细叙述。
一、行星齿轮机构的结构设计行星齿轮机构包括太阳轮、行星轮、内齿圈和行星架等组成。
在进行结构设计时,需要根据传动比、扭矩和转速等要求,选取合适的节数及行星齿轮的参数,并确定合适的齿轮副布置。
在选择节数时,应根据所需的传动比和运动稳定性等因素进行综合考虑。
齿轮副布置可以选择封闭式和开放式两种形式,封闭式结构更为紧凑,但加工和安装难度较大。
而开放式结构则相对较为简洁,方便维护和安装。
二、行星齿轮机构的传动计算1.传动比计算传动比=(Zs+Zr)/Zs其中,Zs表示太阳齿轮的齿数,Zr表示行星轮的齿数。
2.齿轮尺寸计算齿轮尺寸计算主要包括齿轮副模数的选择和齿面强度的计算。
在选择齿轮副模数时,需要根据预计的工作载荷和制造工艺等因素进行综合考虑。
齿面强度的计算可以通过以下公式求解:齿面强度Ft=KF*KH*m*b*Y其中,KF为荷载系数,KH为接触系数,m为模数,b为齿轮宽度,Y 为齿轮材料影响系数。
三、行星齿轮机构的性能评价1.传动误差传动误差是指传动中实际传动比与理论传动比之间的差异。
传动误差主要由机构的制造误差和装配误差引起。
为了降低传动误差,可以采用精密加工和装配工艺,优化齿轮表面处理等措施。
2.传动效率传动效率是指输入功率与输出功率之间的比值,可以通过以下公式计算:传动效率η=(输出功率/输入功率)*100%传动效率的高低主要取决于齿轮的摩擦损失和变形损失。
为了提高传动效率,可以采用高精度的齿轮和适当的润滑措施。
3.寿命综上所述,行星齿轮机构的设计与计算需要根据传动要求对结构进行设计,并进行传动比和齿轮尺寸的计算。
在性能评价方面,需要关注传动误差、传动效率和寿命等因素,并采取相应的措施进行优化。
行星齿轮机构传动比计算方法Key words: epicyclic gear train; speed ratio; compute way.随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。
但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。
本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。
行星齿轮传动或称周转轮系。
根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。
为理解方便,本论文所讨论限于2K-H型周转轮系。
关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。
矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。
1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动Fig 1 Epicyclic gear train0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、Hω为行星架H 转速、3ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即13Z Z =α。
1 行星架固定法机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。
其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。
如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为Hωωωω、、、321。
我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。
行星轮系传动比的计算
回忆上节内容:定轴轮系传动比的计算公式为:i1k=n1/nk=i1*i2*i3* (i)
定轴轮系的特点是:每个齿轮都是围绕固定的周线旋转,没有自身的公转.
今天我们看以下行星轮系,请同学们思考:行星的运动特点?
对,行星一方面不仅围绕固定的轴线旋转,而且会围绕太阳公转.
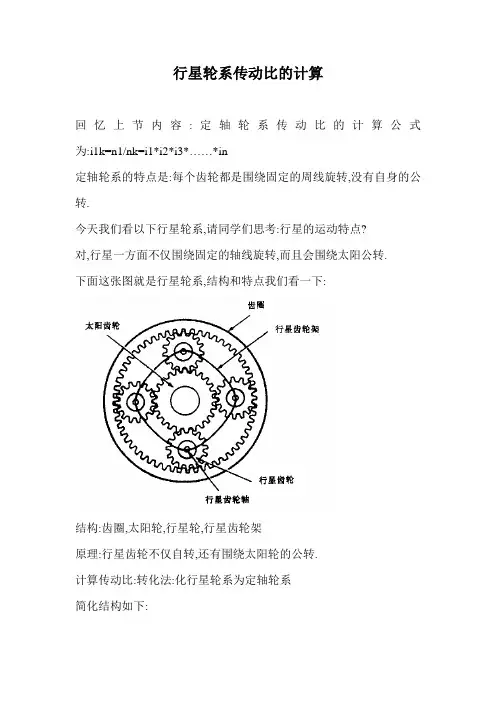
下面这张图就是行星轮系,结构和特点我们看一下:
结构:齿圈,太阳轮,行星轮,行星齿轮架
原理:行星齿轮不仅自转,还有围绕太阳轮的公转.
计算传动比:转化法:化行星轮系为定轴轮系
简化结构如下:
太阳轮:n1 z1
行星轮:n2 z2
齿圈:n3 z3
行星架:nh Zh
则传动比计算公式为:ng-nh/nk-nh=(-1)m齿轮G,K之间所有从动轮齿数的连乘积/齿轮G,K之间所有主动轮齿数的连乘积
例题:如图所示为圆锥齿轮组成的差动轮系,Z1=Z2=Z3,求齿轮1,3和行星架H三者转速的关系
解:该轮系为差动轮系,其中齿轮1,3及行星架H的轴线均互相平行或重合,将齿轮1看作主动轮,齿轮3看作从动轮,并设齿轮1的转向为正,通过画箭头,齿轮3的箭头与齿轮1 的相反,故为负,由公式计算:
N1-nh/n3-nh=-z2z3/z1z2=-z3/z1=-1
所以三者转速关系为:
2nh=n1+n3
分析:行星轮系在汽车上的应用:1.汽车后桥差速器
2.行星齿轮机构变速器。
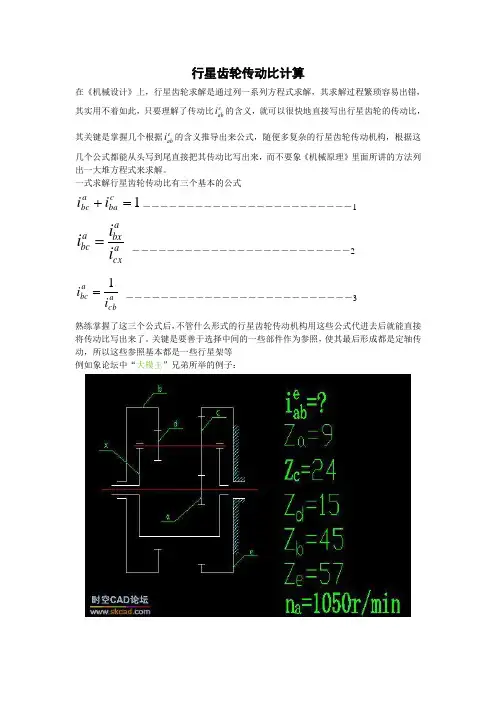
行星齿轮传动比计算在《机械设计》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式1=+c ba a bc i i ――――――――――――――――――――――――1 a cxa bx abci i i = ―――――――――――――――――――――――――2 a cb abc i i 1= ――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等例如象论坛中“大模王”兄弟所举的例子:在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bci i i =将x 加进去, 所以可以得出:e bx e ax eab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba abc i i 了,所以)1()1(xbe x ae ebx e ax eab i i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01c e bd ae c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ⨯-+=⨯--⨯--=--== 再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
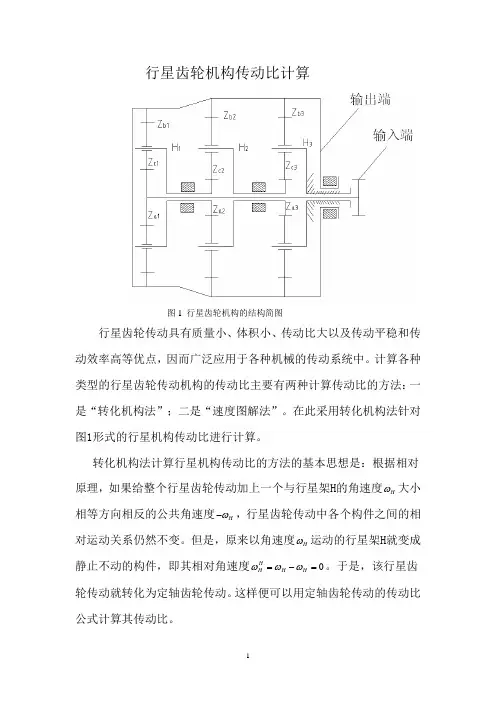
行星齿轮机构传动比计算图1 行星齿轮机构的结构简图行星齿轮传动具有质量小、体积小、传动比大以及传动平稳和传动效率高等优点,因而广泛应用于各种机械的传动系统中。
计算各种类型的行星齿轮传动机构的传动比主要有两种计算传动比的方法:一是“转化机构法”;二是“速度图解法”。
在此采用转化机构法针对图1形式的行星机构传动比进行计算。
转化机构法计算行星机构传动比的方法的基本思想是:根据相对原理,如果给整个行星齿轮传动加上一个与行星架H 的角速度H ω大小相等方向相反的公共角速度H ω-,行星齿轮传动中各个构件之间的相对运动关系仍然不变。
但是,原来以角速度H ω运动的行星架H 就变成静止不动的构件,即其相对角速度0HHH H ωωω=-=。
于是,该行星齿轮传动就转化为定轴齿轮传动。
这样便可以用定轴齿轮传动的传动比公式计算其传动比。
总传动比 1a bi ωω=,其中1a ω、b ω为主动件和被动件的角速度 根据该计算方法的基本思想,结合图1的具体结构,得到第一级传动比为:1111111a H b b H a zi z ωωωω-==-- (1)同理第二级和第三级传动比分别为:2222222a H b b H a zi z ωωωω-==-- (2)3333333a Hb b H a zi z ωωωω-==-- (3)根据图1中的实际结构,及三个内齿圈连接为一体,且第三级行星架H3固定,所以有123b b b b ωωωω===,30H ω= , 12H a ωω= ,23H a ωω= (4) 由(3)式可得3333233b b a b b H a a z zz z ωωωω=-⨯=-⨯= (5) 把(5)式代入(2)式可得32223232223b a b a H a b b b H a b ba z z zz z z ωωωωωωωω+⨯-==--+⨯所以得23323321233233()[(1)]b b b b b b a b b b b H a a a a a a z z z z z zz z z z z z ωωωωωω=-⨯+⨯-⨯=-⨯⨯++= (6) 把(6)式代入(1)式可得:2331112331233111233[(1)][(1)]b b b a b a H a a a b b b b b H a b b a a a z z z z z z zz z z z z z z ωωωωωωωω+⨯⨯++-==--+⨯⨯++ (7)式(7)可化简为:123323323323312332331233233[(1)][(1)]1[(1)]1[(1)]a b b b b b b b a a a a a a b b b b b b b a a a a a a a z z z z z zi z z z z z z zz z zz z zz z z z z z z ωω+⨯+++⨯++==-+⨯+++⨯++ (8)由(8)式可得123323312332331[(1)][(1)]b b b b b b b a a a a a a a z z z z z z z i z z z z z z z ⎧⎫=-⨯+⨯++-⨯++⎨⎬⎩⎭11233233112332331233112331[(1)][(1)][(1)](1)b b b b b b b b a a a a a a a a b b b b b a a a a a z z z z z z z z z z z z z z z z z z z z z z z z z z =--⨯⨯++-⨯++=--⨯++⨯+所以12331123311(1)[(1)](1)b b b b b a a a a a z z z z z i z z z z z -=-+-⨯++⨯+ 12331233(1)[1(1)]b b b b a a a a z z z zz z z z =-+⨯+⨯++ 123123(1)(1)(1)b b b a a a z z z z z z =-+⨯+⨯+ 所以得总传动比1231231(1)(1)(1)b b b a a a z z zi z z z =-+⨯+⨯+ 即为该种行星结构的传动比。
行星传动比计算公式行星传动比计算可不是个简单的事儿,不过咱一步步来,保证让您搞清楚!先来说说啥是行星传动。
您就想象一下,有几个小齿轮像行星一样绕着一个大太阳(中心轮)转,这就是行星传动啦。
那这行星传动比到底咋算呢?咱们来看个例子。
比如说有一个行星齿轮系,中心轮的齿数是 20,行星轮的齿数是 10,内齿圈的齿数是 50。
这时候,咱就得用公式来算算啦。
行星传动比的计算公式是:i = 1+ Zr / Zs 。
这里的 Zr 是内齿圈的齿数,Zs 是太阳轮的齿数。
就拿刚才那个例子来说,内齿圈齿数 50,太阳轮齿数 20,那传动比 i 就等于 1 + 50 / 20 = 3.5 。
这就意味着输入转 3.5 圈,输出才转 1 圈。
记得有一次,我给学生们讲这个知识点。
有个小家伙特别可爱,瞪着大眼睛问我:“老师,这齿轮转来转去的,我头都晕啦,到底有啥用啊?”我笑着跟他说:“你想想看呀,咱们骑的自行车,要是没有合适的传动比,那骑起来得多费劲呀!还有汽车的变速箱,也是通过不同的传动比来让车在不同速度下都能跑得顺顺当当的。
”这小家伙一听,好像有点明白了,点着头说:“哦,原来是这样啊!”在实际应用中,行星传动比的计算可重要啦。
比如在一些大型机械里,要想让机器运转得高效、稳定,就得把传动比算得准准的。
要是算错了,那可就麻烦大了,说不定机器就“罢工”啦。
而且啊,不同的行星传动结构,计算方法还可能会有点小变化。
但不管怎么变,咱们抓住核心的公式和原理,就不怕搞不定。
所以说,这行星传动比的计算虽然有点复杂,但只要咱们多琢磨琢磨,多做做练习题,就一定能掌握好。
总之,搞清楚行星传动比的计算,对于机械设计、工程制造等等领域那可都是非常关键的。
希望您也能轻松拿下这个知识点,让它为您的知识宝库添砖加瓦!。
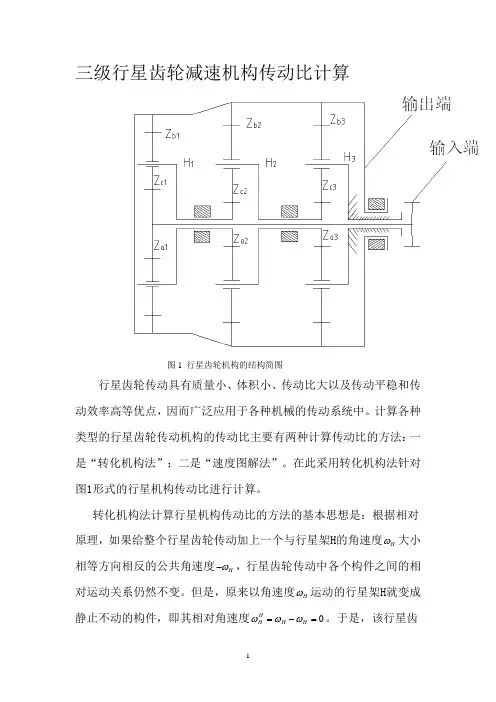
三级行星齿轮减速机构传动比计算图1 行星齿轮机构的结构简图行星齿轮传动具有质量小、体积小、传动比大以及传动平稳和传动效率高等优点,因而广泛应用于各种机械的传动系统中。
计算各种类型的行星齿轮传动机构的传动比主要有两种计算传动比的方法:一是“转化机构法”;二是“速度图解法”。
在此采用转化机构法针对图1形式的行星机构传动比进行计算。
转化机构法计算行星机构传动比的方法的基本思想是:根据相对原理,如果给整个行星齿轮传动加上一个与行星架H 的角速度H ω大小相等方向相反的公共角速度H ω-,行星齿轮传动中各个构件之间的相对运动关系仍然不变。
但是,原来以角速度H ω运动的行星架H 就变成静止不动的构件,即其相对角速度0HHH H ωωω=-=。
于是,该行星齿轮传动就转化为定轴齿轮传动。
这样便可以用定轴齿轮传动的传动比公式计算其传动比。
总传动比 1a bi ωω=,其中1a ω、b ω为主动件和被动件的角速度 根据该计算方法的基本思想,结合图1的具体结构,得到第一级传动比为:1111111a H b b H a zi z ωωωω-==-- (1)同理第二级和第三级传动比分别为:2222222a H b b H a zi z ωωωω-==-- (2)3333333a Hb b H a zi z ωωωω-==-- (3)根据图1中的实际结构,及三个内齿圈连接为一体,且第三级行星架H3固定,所以有123b b b b ωωωω===,30H ω= , 12H a ωω= ,23H a ωω= (4) 由(3)式可得3333233b b a b b H a a z zz z ωωωω=-⨯=-⨯= (5) 把(5)式代入(2)式可得32223232223b a b a H a b b b H a b ba z z zz z z ωωωωωωωω+⨯-==--+⨯所以得23323321233233()[(1)]b b b b b b a b b b b H a a a a a a z z z z z zz z z z z z ωωωωωω=-⨯+⨯-⨯=-⨯⨯++= (6) 把(6)式代入(1)式可得:2331112331233111233[(1)][(1)]b b b a b a H a a a b b b b b H a b b a a a z z z z z z zz z z z z z z ωωωωωωωω+⨯⨯++-==--+⨯⨯++ (7)式(7)可化简为:123323323323312332331233233[(1)][(1)]1[(1)]1[(1)]a b b b b b b b a a a a a a b b b b b b b a a a a a a a z z z z z zi z z z z z z zz z zz z zz z z z z z z ωω+⨯+++⨯++==-+⨯+++⨯++ (8)由(8)式可得123323312332331[(1)][(1)]b b b b b b b a a a a a a a z z z z z z zi z z z z z z z ⎧⎫=-⨯+⨯++-⨯++⎨⎬⎩⎭11233233112332331233112331[(1)][(1)][(1)](1)b b b b b b b b a a a a a a a a b b b b b a a a a a z z z z z z z z z z z z z z z z z z z z z z z z z z =--⨯⨯++-⨯++=--⨯++⨯+所以12331123311(1)[(1)](1)b b b b b a a a a a z z z z z i z z z z z -=-+-⨯++⨯+ 12331233(1)[1(1)]b b b b a a a a z z z zz z z z =-+⨯+⨯++ 123123(1)(1)(1)b b b a a a z z z z z z =-+⨯+⨯+ 所以得总传动比1231231(1)(1)(1)b b b a a a z z zi z z z =-+⨯+⨯+ 即为该种行星结构的传动比。
机械制造与研究· 行星齿轮变速箱的蛄构参墩与传动比计算 伍养机越一连与自动化,2001年簟2期 行星齿轮变速箱的结构参数与传动比计算 饶振钢 ■京炮兵学院江苏南京211131)
摘要:本文阐述了行星齿轮变速箱的结构参数和传动比计算,较详细地讨论了该变速箱的自由度 、 常《动器数Z、离合器数£和行星排数k,以及各挡的传动比计算。本文对履带车辆、坦克、石油机械和工 程机械等的行星齿轮变速箱的设计计算均具有指导意义。 关键词:行星齿轮变速箱;结构参数;传动比 中国分类号:Ⅱn32.425文献标识码:A文章编号:1007-760X(2001l02430154)3
Caleulafiom ofStructure Parameters and Tran ̄oimion Ratio of Planetary Gear.box RAO 21 ̄n-gang Abs州: s p印er deUfil ̄calcndations of structure parametera and uammiasion ratio of planetary .The ati0ns of freedom degree。brake ̄。clutches。nun' ̄r ofplant bars and trammi ̄ion ratio of each step are dis— cu8sed.It is impommt for the design ofplanetary gear-box in caterpillar vehicleI tank·oil machin ̄and en ̄eeT- i 】g machines. Key_nfds:planetary gear-box;structure parameter; ̄mnsmisaion ratio
1概述 在现代,汽车、坦克、自行火炮、工程机械和履带 车辆等机械传动设备中已较广泛地应用了行星齿轮 变速箱。行量齿轮变速箱与普通齿轮变速箱相比, 它的优点是结构紧凑、尺寸小、重量轻、传动比大、传 动效率高、承载能力大、换档轻便迅速,容易实现自 动换档等。行星齿轮变速箱一般是由控制元件(制 动器和离合器)和行星齿轮变速机构等组成。根据 行星齿轮变速机构所具有的自由度数,行星齿轮变 速箱可分为二自由度的行星齿轮变速箱、三自由度 的行星齿轮变速箱和四自由度的行星齿轮变速箱 等。在多级行星齿轮变速箱中,大都采用2K—H (A)型的行星齿轮机构(见附图),通常称之为单元 行星齿轮机构或行星排。 多级行星齿轮变速箱的自由度可按下列公式计 算: IF:3n一2pL—P (1) 式中: ——运动构件数: P ——运动低副数;
收稿日期:铷0O—O l3
附田2K—HfA)型行量排 运动高副数。 在行星齿轮变速箱中,一般可取P : ,即可 得: :Ⅱ一 (2) 在多级行星变速箱中,其运动构件数 等于其 运动基本构件数 。和行星排数 之和,即 : 。+ ;而且在每个2K—H(A)型行星排中皆有二个高副。
l5· 机械制造与研究· 行星齿轮变速葙的结构参教与传动比计算 ‘江苏机艟爿造与自动化)卸1年第2期 即PR=2k,代人上式,则得: =n0一k (3) 上式表明了行星齿轮变速箱的自由度 与其 结构参数 和k的关系,且与其结构简图相对应; 故称上式为结构公式。
2行星齿轮变速箱的结构参数计算 具有自由度数为 的多级行星齿轮变速箱,一 般需要设置若干个控制元件(制动器和离合器),组 成相应的传动档数n ;同时还应有所需运动的基本 构件n ,组成相应的行星排数k所以行星齿轮变 速箱的结构参数为控制元件数m(含制动器数z和 离台器数£)、行星排数k和运动基本构件数n。。 2.1控制元件数和传动档数的确定 机械工程应用的行星齿轮变速箱一般具有的自 由度数为 :2、3、4……。但是,在仅采用了一个 原动机(内燃机或电动机)驱动的变速传动方案中, 为了使行星齿轮变速箱在某个档位得到仅具有一个 自由度的行星齿轮传动,必须消除( 一1)个自由 度。因此,在行星齿轮变速箱中一般均需要设置若 干个控制元件,其总的控制元件数m为: m=Z+£ (4) 式中:z——制动器数; £——离合器数。 如果某个行星齿轮变速箱在接入控制元件之前 具有 个自由度,但当它被接人( 一1)个控制元 件时,则可使其成为仅有一千自由度的行星齿轮传 动箱。显然,当行星齿轮变速箱被接人一个控制元 件后,则可使该行星变速箱中的两个构件成为刚性 连接,从而使它的运动基本构件数 减少1,即使 其自由度数 也减少1。为了使该行星齿轮变速 箱能获得几种不同的传动比,则其应设置的控制元 件数m为: m> 一1 (5) 行星齿轮变速箱的传动档数n (变速传动的级 数)可由同时被接人的控制元件数m取( 一1)的 组合数确定,即它的传动档数n 应满足下列不等 式: c:‘。 T丌(6) 如果现已知某个行星齿轮变速箱所需的档数 nd(含直接档),试确定它所需要的控制元件数m。 16· 般,可按下述两种情况求得其所需的控制元件数 m a)对于自由度 =2的行星齿轮变速箱,由式 (6)可得: nd=c:~=c =m (7) b)对于自由度 ≥3的行星齿轮变速箱,其档 数n d可按如下两种具体情况确定。 1)当m= 时,由式(6)可得: n d=c : :m(8) 所以,只要m= ,所有的行星齿轮变速箱的控 制元件数m均等于传动档数n ,即m=凡。 2)当m> 时,由式(6)可得: lqd:c : 号i > (9 ) 此时 :3。 或: c : > (9b) 此时 =4 当 =5、6,7……时,依此类推。 因此,在一般情况下,其控制元件数m为: m≥ (10) 应该指出,多自由度的行星齿轮变速箱接人的 控制元件越多,其控制过程越复杂。减少控制元件 数m,可简化其传动方案图,因而使行星齿轮变速 箱采用( 一1)个控制元件,以实现其档数为 = c: 的变速传动。 在同一类行星齿轮变速箱中,可设置的离合器 数应小于控制元件数,即£<m。由式(5)得: £≤ 一1 (11) 为了使行星齿轮变速箱获得传动比i:1的直 接档,可取离合器L=W一1,以简化行星齿轮变速 箱的传动结构。 根据公式(4),行星齿轮变速箱所需的制动器数 为: z=m—L f12) 2.2行星排数k的确定 具有 个自由度的行星齿轮变速箱除应设置 所需的控制元件数m外,还须采用相应的行星排数 k。若使行星排数k减少1,可能会破坏行星齿轮变 速箱传动方案图的正确联系,或改变其自由度数 ;或增加其控制元件数m,从而使控制过程复杂 机械制造与研究· 行星齿轮变速葙的结构参教与传动比计算 (讧苏机械爿遗与自动化)硼年第2期 化。 般,组成各种行星齿轮变速箱所需的行星排 数k应满足下列关系式: 若 =2,4,6,9…k=0.5 1 若 =2,3,4,……k= 一1} (13) 若 =2,3,4,……k> 一1 只有在k> 一1的情况下,才能满足控制元件 数m>W的条件,从而实现行星齿轮变速箱档数 >m的变速传动。否则,其档数为 =m,在较常 见的行星齿轮变速箱(m> )中,通常取其行星排 数k为: k=m一( 一1) (14) 若m= ,则可得到行星排数k为: k=n 一( 一1) (is) 最后,还应该按结构公式(3)进行验算。 根据给定的行星齿轮变速箱的传动档数n (即 传动比个数),采用上述公式便可保证在较少的控制 元件数m条件下,获得实现规定的传动档数 所 需的控制元件数m、行星排数k和运动基本构件数 n0 O 3行星齿轮变速箱的传动比计算
在较常见的行星齿轮变速箱中,大都采用2K— H(A)型行星排(见图1)作为组成单元。然后,按各 个行星排被控制的具体情况(是否制动或闭锁),写 出相应的运动学方程式,即写出各个行星排的构件 转速方程组: P1 nu一(1 P1)nm=0 nd+P2 n 一(1 P2) m=0 ; : (16) i ! n ptn h上一(I+P )nH =0 式中: .、 和 分别为各个行星排中心轮a、b 和转臂H的转速: P为各个行星排的特性系数,即有:P= /Z 。 其中,z。为中心轮a的齿数, 为内齿圈的齿数 由于2K—H(A)型行星排具有中心轮a、b和转 臂H三个基本构件,如果知道了其输入和制动件的 具体情况,则可得其转动比计算公式 现按下列三 种情况讨论: a)若内圈b被制动,即n :0,中心轮a输入和 转臂H输出(见图1),则其运动学方程式为: n 一(1 P)nH=0 (17) 传动比计算公式为: = =1+P (I8) 为了获得较小尺寸的行星排和便于将行星轮g 安装在滚动轴承上,一般取上述行星排的特性参数 P=1.5 5。但在履带车辆的行星齿轮变速箱中,已 出现了P>5的变速传动。 当转臂H输入和中心轮a输出时,则得其传动 比计算公式为: 南 (19) b)若中心轮a被制动,即n =0,内齿圈b输入 和转臂H输出(见附图1),则得其运动学方程式为: pnb一(1 P)nH=0 (20) 则其传动比计算公式为: f : : (21) 当转臂H输入和内齿轮b输出时,其传动比计 算公式为: 南 (22)_p J c)若转臂H被制动,即 =0,则变成普通的 定轴齿轮数传动。当中心轮a输入和内齿圈b输出 时,则其传动比公式为: P(23)一一 J
当内齿圈b输入和中心轮a输出时,则其传动 比公式为:
等=一吉=一 ( )一 一瓦 24J 应该提示:对于具有 个档数的行星齿轮变速 箱,其传动比i的计算是按其不同的档位:1、2…n 档和在该档位时各个行星排.中构件的被控制情况来 分别进行的,即应按公式(16)分别计算各档的传动 比i1、i 、 …… 。
参考文献: [1]饶振钢.行星传动机构设计(第二版)[M]北京:国防工业出版 社.1994. [2]陈启橙等译.行星齿艳传动手册[M].北京:冶金工业出版社. I986 [3]向宗志等译坦克结构与计算[M]北京:国晡工业出牍社. 1965
l7·