第三章
3-1 已知二阶系统闭环传递函数为 36
936
2
++=
s s G B 。 试求单位阶跃响应的t r , t m ,δ% , t s 的数值?
解:[题意分析]这是一道典型二阶系统求性能指标的例题。解法是把给定的闭环传递函数与二阶系统闭环传递函数标准形式进行对比,求出n ω参数,而后把n ω代入性能指标公式中求出r t ,m t ,%δ,s t 和N 的数值。 )/(6
36秒弧度==n ω
(弧度)
秒(弧度72.041.411)
/97.3166
.0175.0292
1
2
2
=?=-==-?==-==
-ζ
ζ
θζωωζ
ωζtg
n d n
上升时间 t r 秒61.097.372
.014.3=-=-=d r t ωθπ 峰值时间t m 秒79.097
.314.3===
d m t ωπ 过度过程时间t s %)2(89.06
75.04
4
秒=?=
=
n
s t ωζ
%)5(70.06
75.03
3
秒=?=
=n
s t ωζ
超调量δ%
%8.2%100%100%66
.075
.012
=?=?=-
--
πζ
π
ζδe
e
3-2 设单位反馈系统的开环传递函数为 )
1(1
)(+=
s s s G K
试求系统的性能指标,峰值时间,超调量和调节时间。
解:[题意分析]这是一道给定了开环传递函数,求二阶系统性能指标的练习题。在这里要抓住二阶系统闭环传递函数的标准形式与参数(ζ,n ω)的对应关系,然后确定用哪一组公式去求性能指标。
根据题目给出条件可知闭环传递函数为 1
1
)()()(2++==
s s s X s Y s G B 与二阶系统传递函数标准形式2
222n
n n s s ωζωω++相比较可得12,12
==n n ζωω,即n ω=1,ζ=0.5。由此可知,系统为欠阻尼状态。
故,单位阶跃响应的性能指标为
秒秒秒
61
5.03
3
%)5(815.04
4
%)2(%4.16%100%63.312
12
=?=
=
=?===?==-?=
--n
s n
s n m t t e
t ζωζωδζ
ωπζπζ
3-3 如图1所示系统,假设该系统在单位阶跃响应中的超调量%δ=25%,峰值时间
m t =0.5秒,试确定K 和τ的值。
图1
解:[题意分析]这是一道由性能指标反求参数的题目,关键是找出:K,τ与ζ,n ω的关系;%δ,m t 与ζ,n ω的关系;通过ζ,n ω把%δ,m t 与K,τ联系起来。 由系统结构图可得闭环传递函数为 K
s K s K
s K s s K s X s Y s G B +++=+++==
)1()1()1()()()(2ττ 与二阶系统传递函数标准形式相比较,可得
2
2
1
212;
n
n n n K K ωζωττζωω-=
+==或
由题目给定: %25%100%2
1=?=--ζζ
πδe
即 25.02
1=--ζζ
πe
两边取自然对数可得 3863.125.0ln 12
-==--ζ
πζ
4.03863
.13863
.12
2=+=
πζ
依据给定的峰值时间: 5.012
=-=
ζ
ωπn m t (秒)
所以 85.615.02
=-=ζ
π
ωn (弧度/秒)
故可得
4795.462
≈==n K ω
τ≈0.1
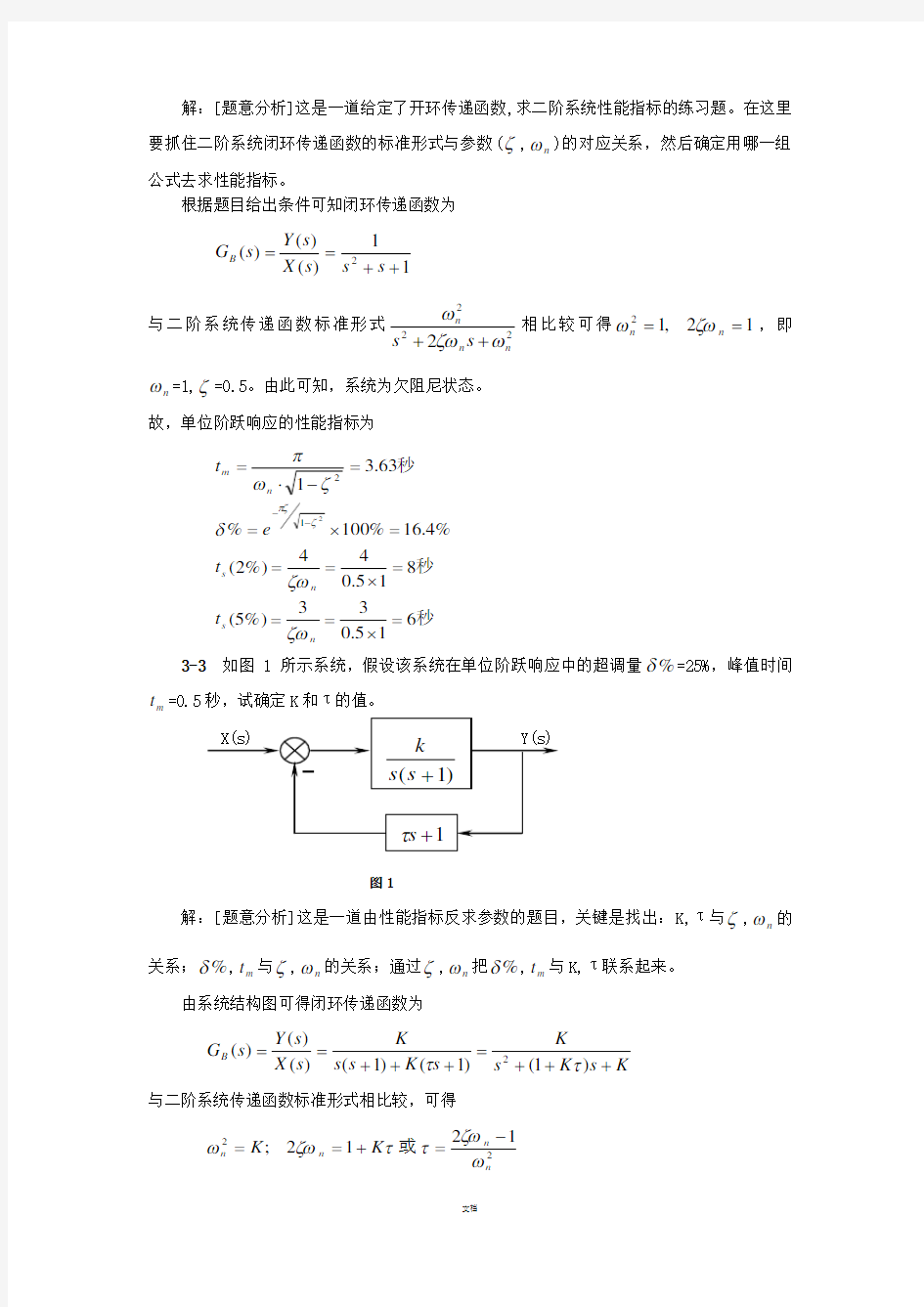
3-4 已知系统的结构图如图2所示,若)(12)(t t x ?= 时,试求:
(1) 当τ=0时,系统的t r , t m , t s 的值。
(2) 当τ≠0时,若使δ%=20%,τ应为多大。
图2
解:[题意分析]这是一道二阶系统综合练习题。(1)练习输入信号不是单位阶跃信号时,求性能指标。关键是求出 n ω,ζ,θ。(2)的求法与例4-3-3相似。
(1) 由结构图可知闭环传递函数为 50
250
)()()(2++==
s s s X s Y s G B 可得 )/(07.750秒弧度==n ω
弧度43.195.811;14.0222
1
=?=-===-ζ
ζ
θωζtg
n
由于s
s X 2
)(=
输出的拉氏变换为 22222)(n
n n
s s Y ωζωω++?=
则拉氏反变换为
[]
%)
2(71.307
.714.04
4
%)
5(78.207
.714.03
3
45.099
.007.714
.3124.099.007.743
.114.31%64%100%100%)
95.817sin(01.112)sin(112)(2
299
.044
.01995.02
2
秒秒秒
秒=?=
=
=?===?=
-==?-=-?-=
=?=?=?+-=??
??????+?--=-
--
--n
s n
s n m n r d t
t t t t e e
t e t e t y n ζωζωζ
ωπζ
ωθπδθωζζ
ζ
ωζ (2) 当τ≠0时,闭环传递函数
50
)5.02(50
)()()(2+++==
s s s X s Y s G B τ )/(07.750秒弧度==n ω
5
.0)
1(25.022-=
+=n n ζωττ
ζω得
由 %20%100%2
1=?=--
ζ
ζπ
δe
2.02
1=--
ζ
ζπ
e
两边取自然对数 61.12.0ln 12
-==--
ζ
ζπ
, 可得
46.061.161.12
2
=+=
π
ζ
故 73.85
.)
107.746.0(2=-?=o τ
%)2(92.007
.746.03
3
秒=?=
=
n
s t ζω
3-5
(1) 什么叫时间响应
答:系统在外加作用的激励下,其输出随时间变化的函数关系叫时间响应。
(2) 时间响应由哪几部份组成?各部份的定义是什么?
答:时间响应由瞬态响应和稳态响应两部分组成。瞬态响应是系统受到外加作用后,系统从初始状态到最终稳定状态的响应过程称瞬态响应或者动态响应或称过渡过程。稳态响应是系统受到外加作用后,时间趋于无穷大时,系统的输出状态或称稳态。
(3) 系统的单位阶跃响应曲线各部分反映系统哪些方面的性能?
答:时间响应由瞬态响应和稳态响应两部分组成。瞬态响应反映系统的稳定性,相对稳定性及响应的快速性;稳态响应反映系统的准确性或稳态误差。
(4) 时域瞬态响应性能指标有哪些?它们反映系统哪些方面的性能?
答:延迟时间d t ;上升时间r t ;峰值时间m t ;调节时间s t ;最大超调量%δ.d t ,r t ,m t ,s
t 反映系统的快速性,即灵敏度,%δ反映系统的相对稳定性。
3-6设系统的特征方程式为 06111262
3
4
=++++s s s s
试判别系统的稳定性。
解:特征方程符号相同,又不缺项,故满足稳定的必要条件。列劳斯表判别。
36
)
61(0
455)6(366101166
1210
12
3
4s s s s s 同乘同乘 由于第一列各数均为正数,故系统稳定。也可将特征方程式因式分解为 0)1)(3)(2(2
=++++s s s s
根2
321,3,24,321j s s s ±-
=-=-=均有负实部,系统稳定。
3-7设系统的特征方程式为 0222
3
=+++s s s
解:列劳斯表
2
12
2
10
1
23ε
s s
s s
将特征方程式因式分解为 0)2)(1(2
=++s s
根为 2,
132,1-=±=s j s
系统等幅振荡,所以系统临界稳定。
3-8 单位反馈系统的开环传递函数为 )
125.0)(11.0()(++=
s s s K
s G k
试求k 的稳定范围。
解:系统的闭环特征方程: 0
35.0025.00)125.0)(11.0(2
3
=+++=+++K s s s K s s s
列劳斯表
K
s K K
s K
s s 0
12
302.035.035.01025.0-
系统稳定的充分必要条件 K>0
0.35-0.025K>0
得 K<14
所以保证系统稳定,K 的取值范围为0 3-9 (1) 系统的稳定性定义是什么? 答:系统受到外界扰动作用后,其输出偏离平衡状态,当扰动消失后,经过足够长的时间,若系统又恢复到原平衡状态,则系统是稳定的,反之系统不 稳定。 (2) 系统稳定的充分和必要条件是什么? 答:系统的全部特征根都具有负实部,或系统传递函数的全部极点均位于[S]平面的左半部。 (3) 误差及稳态误差的定义是什么? 答:输出端定义误差e(t):希望输出与实际输出之差。输入端定义误差e(t);输入与 主反馈信号之差。稳态误差,误差函数e(t),当t →∞时的误差值称为稳态误差,即 3-10已知单位反馈随动系统如图3所示。若16=K ,s T 25.0=。试求: (1)典型二阶系统的特征参数ζ和n ω; (2)暂态特性指标p M 和)5(00 s t ; (3)欲使 016=p M ,当T 不变时,K 应取何值。 图3随动系统结构图 解: 由系统结构图可求出闭环系统的传递函数为 T K s T s T K K s Ts K s Φ++= ++= 1/)(22 与典型二阶系统的传递函数比较 2 22 2s (s)n n n s Φωζωω++= 得 KT T K n 21,== ζω 已知K 、T 值,由上式可得 25.021 ),/(825.016===== KT s rad T K n ζω 于是,可 % 47%100%100%2 2 25.0125.01=?=?=-- -- πζ ζπ e e M p ) %5(5.18 25.03 3 =?=?= ≈ s t n s ζω 为使 016=p M ,由公式可求得5.0=ζ,即应使ζ由0.25增大到0.5,此时 425.025.04141=??=≈ ζT K 即K 值应减小4倍。 3-11控制系统框图如图4所示。要求系统单位阶跃响应的超调量 % 5.9=p M ,且峰值时间 s t p 5.0=。试确定1K 与τ的值,并计算在此情况下系统上升时间r t 和调整时间)2(00 s t 。 图4 控制系统框图 解:由图可得控制系统的闭环传递函数为: 1 2 110)101(10)() (K s s K s R s C +++=τ 系统的特征方程为010)101(12 =+++K s s τ。所以 τξωω1012,102 1+==n n K 由题设条件: 095 .0%1002 1=?=--ξ ξπe M p , s t n p 5.012 =-= ξ ωπ 可解得854.7,6.0==n ωξ,进而求得 84.0101 2,15.610 21=-= == n n K ζωτω 在 此 情况下 系统上升时间 rad s t n r 9273.01.53)(cos 35.01012 ====--= -ζθζωθπ 调整时间 85 .04 %)2(=≈ n s t ζω 3-12设系统的特征方程式分别为 1.05432234=++++s s s s 2.01222 34=++++s s s s 3.022332 345=+++++s s s s s 试用劳斯稳定判据判断系统的稳定性。 解:解题的关键是如何正确列出劳斯表,然后利用劳斯表第一列系数判断稳定性。 1.列劳斯表如下 s4 1 3 5 s3 2 4 s2 1 5 s1 -6 s0 5 劳斯表中第一列系数中出现负数,所以系统不稳定;又由于第一列系数的符号改变两次,1→-6→5,所以系统有两个根在s 平面的右半平面。 2.列劳斯表如下 s4 1 1 1 s3 2 2 s2 0(ε) 1 s1 2-2/ε s0 1 由于ε是很小的正数,ε行第一列元素就是一个绝对值很大的负数。整个劳斯表中第一列元素符号共改变两次,所以系统有两个位于右半s 平面的根。 3.列劳斯表如下 s5 1 3 2 s4 1 3 2 s3 0 0 由上表可以看出,s3行的各项全部为零。为了求出s3各行的元素,将s4行的各行组成辅助方程式为 A(s)= s4+3s2+2s0 将辅助方程式A(s)对s 求导数得 s s ds s dA 64) (3+= 用上式中的各项系数作为s3行的系数,并计算以下各行的系数,得劳斯表为 s5 1 3 2 s4 1 3 2 s3 4 6 s2 3/2 2 s1 2/3 s0 2 从上表的第一列系数可以看出,各行符号没有改变,说明系统没有特征根在s 右半平面。但由于辅助方程式A(s)= s4+3s2+2=(s2+1)(s2+2)=0可解得系统有两对共轭虚根s1,2=±j ,s3,4=±j2,因而系统处于临界稳定状态。 3-13已知系统结构图如图5所示,试确定使系统稳定 的K 值范围。 解: 解题的关键是由系统结构图正确求出系统的特征 方程式,然后再用劳斯稳定判据确定使系统稳定的K 值范围。 图5控制系统结构图 闭环系统的传递函数为 K s s s K s Φ+++=23)(23 其闭环特征方程式为 s3 + 3s2 + 2s+ K =0 列劳斯表为: s3 1 2 s2 3 K s1 (6-K )/3 s0 K 为使系统稳定,必须使劳斯表中第一列系数全大于零,即0>K 和06>-K ,因此,K 的取值范围为60< 3-14 已知单位反馈控制系统的开环传递函数如下。 (1) )15.0)(11.0(10 )(++= s s s s G (2)) 5.0() 5)(1()(10)(2 =+++=a s s s a s s G 试求:1.静态位置误差系数 p K 、静态速度误差系数v K 和静态加速度误差系数a K ; 2.求当输入信号为2 4)(1)(t t t t r ++=时的系统的稳态误差。 解:(1)首先判断系统的稳定性。 系统的闭环传递函数为 2002012200 )(1)()(23 +++=+= s s s s G s G s Φ 其闭环特征方程为020020122 3=+++s s s 。由劳斯判据可知系统是稳定的。系统为Ⅰ型, 可以求得静态误差为: ∞ =++==→→) 15.0)(11.0(10 lim )(lim 00 s s s s G K s s p 10 )15.0)(11.0(10 lim )(lim 0 =++? ==→→s s s s s sG K s s v 0 )15.0)(11.0(10 lim )(lim 20 20 =++? ==→→s s s s s G s K s s a 所以给定输入信号的稳态误差计算如下: ∞ =+++= a v p ss K K K e 2 411 (2) 判断系统稳定性。 系统的闭环传递函数为 5 1056) 5.0(10)(1)()(234 +++++=+= s s s s s s G s G s Φ 其闭环特征方程为0510562 34=++++s s s s 。由劳斯判据可知系统是稳定的。系统为Ⅱ 型,可以求得静态误差为: ∞ =+++==→→) 5)(1() 5.0(10lim )(lim 200 s s s s s G K s s p ∞ =+++? ==→→)5)(1() 5.0(10lim )(lim 20 s s s s s s sG K s s v 1)5)(1() 5.0(10lim )(lim 2 20 20 =+++? ==→→s s s s s s G s K s s a 所以给定输入信号的稳态误差计算如下: 2 2 411=+++= a v p ss K K K e 注意:该例中若取2=a ,则由劳斯判据可知系统是不稳定的。因此不能定义静态误差系数,也谈不上求稳态误差。 第四章 4-1.单位反馈系统的开环传递函数为 (1) ()(2)( 3) K s G s s s s += ++ 试绘制闭环系统的概略根轨迹。 解:按下述步骤绘制概略根轨迹 (1) 系统开环有限零点为11z =-,开环有限极点为1230,2,3p p p ==-=-。 (2) 实轴上的根轨迹区间为[3,2],[1,0]---。 (3) 根轨迹的渐近线条数为2n m -=,渐近线的倾角为1290,90??==-,渐近线与实 轴的交点为1 1 2n m i i i i P z n m ασ==-= =--∑∑ (4) 确定分离点。分离点方程为1111 231 d d d d ++= +++,用试探法求得 2.47d =-。 闭环系统概略根轨迹如下图1 图1 4-2.设某负反馈系统的开环传递函数为2 (1) ()()(0.12) K s G s H s s s += +,试绘制该系统的根轨迹 图。 解:渐近线与实轴的交点101 4.52 ασ-+= =- 渐近线与实轴正方向的夹角为2 π± 。 分离点与汇合点:由222 (10)(21320) 01(1)d s s s s s ds s s ??+++= = ?++?? 得2 213200s s ++= 所以,1,2 2.54s =--或。根轨迹如下图2 图2 4-3.以知系统开环传递函数2()()(4)(420) K G s H s s s s s = +++试绘制闭环系统的根轨迹。 解:(1)系统无开环有限零点,开环极点有四个,分别为0,-4,24j -± (2)实轴上的根轨迹区间为[4,0]-。 (3)渐近线有四条2,45,135,225,315a a σ???? =-=。 (4)根轨迹的起始角。复数开环极点343,42490,90p p p j θθ=-±=-=处 (5)确定根轨迹的分离点。由分离点方程 1111042424 d d d j d j +++=++++- 解得12,32,26d d j ==-±时,K=100,12d d d 3,,皆为根轨迹的分离点。 (6) 系统闭环特征方程为4 3 2 ()836800D s s s s s K =++++= 列写劳斯表,可以求出当K=260时,劳斯表出现全零行,辅助方程为2 ()262600A s s =+=。解得根轨迹与虚轴的交点10ω=±。如下图3 图3 4-4.单位反馈控制系统的开环传递函数为(1) ()(2) K s G s s s -= +,k 的变换范围为0→∞,试绘 制系统根轨迹。 解:分析知道,应绘制零度根轨迹。按照零度根轨迹的基本法则确定根轨迹的参数:(1)系统开环有限零点为1,开环有限极点为0,-2。 (2)实轴上的根轨迹区间为[2,0],[1,]-+∞。 (3)渐近线有一条0a ?? = (4)确定根轨迹的分离点,由分离点的方程 222 (2)(1)(22)()0(2)d K s s K s s G s ds s s +--+==+,解得122.732,0.732d d ==- (5) 确定根轨迹与虚轴的交点。系统闭环特征方程为2 ()20D S s s Ks K =++-=。当 k=-2时,闭环特征方程的根为1,22s =±4: 图4 4-5.以知单位反馈系统的开环传递函数为21 ()4()(1) s a G s s s +=+,a 的变化范围为[0,]+∞,试绘制系统的闭环根轨迹。 解:系统闭环特征方程为3 2 11 ()044 D S s s s a =++ += 即有 3214 101 4 a s s s +=++。等效开环传递函数为132()1 4 K G s s s s = ++,1 4 K a = ,变化范围为[0,]+∞。 (1) 等效系统无开环有限零点,开环极点为12310,2 p p p ===- (2) 实轴上的根轨迹区间为(,0]-∞ (3) 根轨迹有三条渐近线1,60,180,1203 a a σ??? =-=- (4) 根轨迹的分离点方程22 41 (32) 4()01() 2 K s s d G s ds s s -++==+,解得12 11,26d d =-=-。 (5) 确定根轨迹与虚轴的交点。由劳斯表,可以求出当a=1时,劳斯表出现全零行,辅 助方程为2 1()04A s s =+ =。解得1,21 2 s j =±。如下图5 图5 4-6. 设单位反馈控制系统开环传递函数) 15.0)(12.0()(++=s s s K s G ,试概略绘出系统根轨 迹图(要求确定分离点坐标d )。 解) 2)(5(10)15.0)(12.0()(++=++= s s s K s s s K s G 系统有三个开环极点:01=p ,22-=p ,53-=p ① 实轴上的根轨迹: (]5,-∞-, []0,2- ② 渐近线: ??? ????±=+=-=--=πππ?σ,33)12(3 73520k a a ③ 分离点: 02 1511=++++d d d 解之得:88.01-=d ,7863.32-d (舍去)。 ④ 与虚轴的交点:特征方程为 010107)(2 3 =+++=k s s s s D 令 ???=+-==+-=0 10)](Im[0 107)](Re[3 2ωωωωωj D k j D 解得???==7 10 k ω 与虚轴的交点(0, j 10±)。 根轨迹如图6所示。 图6 4-7.设系统开环传递函数 ) )(4(20 )(b s s s G ++= 试作出b 从0→∞变化时的根轨迹。 解:做等效开环传递函数 G * (s)20 4) 4(2 +++= s s s b ① 实轴上的根轨迹:]4,(--∞ ② 分离点: 4 1 421421+=-++++d j d j d 解得:472.01-=d (舍去),472.82=d 如图解4-14所示,根轨迹为以开环零点为圆心,开环零点到开环极点的距离为半径的圆。 图7 根轨迹图 网络教育学院 《管理沟通》课程大作业 学习中心:甘肃敦煌艺术旅游中等专业学校奥鹏学习中心 层次:专升本 专业:公共事业管理 年级: 2016 年秋季 学生:彭玉东 辅导教师: 题目三:什么是员工忠诚度?培养和提高员工忠诚度的方法有哪些?如果你是你现在公司的领导,你将采取哪些具体措施提高员工忠诚度? 一、什么是员工忠诚度? 员工的忠诚度是指员工对于企业所表现出来的行为指向和心理归属,即员工对所服务的企业尽心竭力的奉献程度。员工忠诚度是员工对企业的忠诚程度,它是一个量化的概念。忠诚度是员工行为忠诚与态度忠诚的有机统一。行为忠诚是态度忠诚的基础和前提,态度忠诚是行为忠诚的深化和延伸。 员工忠诚度是员工对企业的忠诚程度,它是一个量化的概念。忠诚度是员工行为忠诚与态度忠诚的有机统一。行为忠诚是态度忠诚的基础和前提,态度忠诚是行为忠诚的深化和延伸。 二、培养和提高员工忠诚度的方法有哪些? 员工忠诚可分为主动忠诚和被动忠诚。前者是指员工主观上具有忠诚于企业的愿望,这种愿望往往是由于组织与员工目标的高度一致,组织帮助员工自我发展和自我实现等因素造成的。被动忠诚是指员工本身不愿意长期留在组织里,只是由于一些约束因素,如高工资、高福利、交通条件等,而不得不留在组织里,一旦这些条件消失,员工就可能不再对组织忠诚了。那么究竟该如何提高员工的忠诚度呢?我认为,首先要把被动忠诚变为主动忠诚 (一)、让员工得到精神上的满足,尊重员工的精神生活。尊重员工是情感管理的本质。对员工尊重换来的将是员工对企业的忠诚和信赖。关心是人不可或缺的精神需要,从大的方面着眼就是关心下属事业上的进步,对他们的未来进行职业规划,帮助他们实现自己的抱负。管理者可通过赞美员工,授权给员工,采用感人的薪酬福利等措施提升员工的幸福感。 (二)、对目标完成情况的考评要改正。例如:在酒店中有一套这样的检查系统;自我检查、员工相互检查、领班检查、主管检查和白手套检查。公平的对业绩进行有效的评估。在目标激励的过程中,要正确处理大目标与小目标,个体目标与组织目标,理想与现实,原则性与灵活性的关系,在目标考核和评价上要按照德,能,勤,绩标准对人才进行全面综合考察,性,定量,定级作到“刚性”规范,奖发分明。励及参与激励等。 (三)、竞争压力激励法竞争是激发员工干劲的有效方法之一,引入竞争机制,开展员工部门与部门之间的竞争,竞赛活动,使员工感受到外部压力和危机感,部门内部可能变的更加团结成员之间的一些分歧会搁置一边,通过竞争还可以从竞争对手那里学到成功的经验或失败的教训。然后化压力为动力,化干戈为玉帛,向更高的目标发起最强劲的冲刺。在运用时要注意以下几点: 1、竞争要公平。饭店在利用竞争压力激励员工时,要尽量使竞争在公平的规则及操作下运行,否则竞争只是一种形式。 第三章 3-1 已知二阶系统闭环传递函数为 36 936 2 ++= s s G B 。 试求单位阶跃响应的t r , t m ,δ% , t s 的数值? 解:[题意分析]这是一道典型二阶系统求性能指标的例题。解法是把给定的闭环传递函数与二阶系统闭环传递函数标准形式进行对比,求出n ω参数,而后把n ω代入性能指标公式中求出r t ,m t ,%δ,s t 和N 的数值。 )/(6 36秒弧度==n ω (弧度) 秒(弧度72.041.411) /97.3166 .0175.0292 1 2 2 =?=-==-?==-== -ζ ζ θζωωζ ωζtg n d n 上升时间 t r 秒61.097.372 .014.3=-=-=d r t ωθπ 峰值时间t m 秒79.097 .314.3=== d m t ωπ 过度过程时间t s %)2(89.06 75.04 4 秒=?= = n s t ωζ %)5(70.06 75.03 3 秒=?= =n s t ωζ 超调量δ% %8.2%100%100%66 .075 .012 =?=?=- -- πζ πζδe e 3-2 设单位反馈系统的开环传递函数为 ) 1(1 )(+= s s s G K 试求系统的性能指标,峰值时间,超调量和调节时间。 解:[题意分析]这是一道给定了开环传递函数,求二阶系统性能指标的练习题。在这里要抓住二阶系统闭环传递函数的标准形式与参数(ζ,n ω)的对应关系,然后确定用哪一组公式去求性能指标。 根据题目给出条件可知闭环传递函数为 1 1 )()()(2 ++== s s s X s Y s G B 与二阶系统传递函数标准形式2 222n n n s s ωζωω++相比较可得12,12 ==n n ζωω,即n ω=1,ζ=0.5。由此可知,系统为欠阻尼状态。 故,单位阶跃响应的性能指标为 秒秒秒 61 5.03 3 %)5(815.04 4 %)2(%4.16%100%63.312 12 =?= = =?===?==-?= --n s n s n m t t e t ζωζωδζ ωπζπζ 3-3 如图1所示系统,假设该系统在单位阶跃响应中的超调量%δ=25%,峰值时间 m t =0.5秒,试确定K 和τ的值。 图1 解:[题意分析]这是一道由性能指标反求参数的题目,关键是找出:K,τ与ζ,n ω的关系;%δ,m t 与ζ,n ω的关系;通过ζ,n ω把%δ,m t 与K,τ联系起来。 由系统结构图可得闭环传递函数为 K s K s K s K s s K s X s Y s G B +++=+++== )1()1()1()()()(2ττ 与二阶系统传递函数标准形式相比较,可得 2 2 1 212; n n n n K K ωζωττζωω-= +==或 . 第一章引论 1-1 试描述自动控制系统基本组成,并比较开环控制系统和闭环控制系统的特点。答: 自动控制系统一般都是反馈控制系统,主要由控制装置、被控部分、测量元件组成。控制装置是由具有一定职能的各种基本元件组成的,按其职能分,主要有给定元件、比较元件、校正元件和放大元件。如下图所示为自动控制系统的基本组成。 开环控制系统是指控制器与被控对象之间只有顺向作用,而没有反向联系的控制过程。此时,系统构成没有传感器对输出信号的检测部分。开环控制的特点是:输出不影响输入,结构简单,通常容易实现;系统的精度与组成的元器件精度密切相关;系统的稳定性不是主要问题;系统的控制精度取决于系统事先的调整精度,对于工作过程中受到的扰动或特性参数的变化无法自动补偿。 闭环控制的特点是:输出影响输入,即通过传感器检测输出信号,然后将此信号与输入信号比较,再将其偏差送入控制器,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。 闭环系统与开环系统比较的关键,是在于其结构有无反馈环节。 < 1-2 请说明自动控制系统的基本性能要求。 答: 自动控制系统的基本要求概括来讲,就是要求系统具有稳定性、快速性和准确性。 稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。稳定性通常由系统的结构决定与外界因素无关。对恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值(例如恒温控制系统)。对随动系统,被控制量始终跟踪参量的变化(例如炮轰飞机装置)。 快速性是对过渡过程的形式和快慢提出要求,因此快速性一般也称为动态特性。在系统稳定的前提下,希望过渡过程进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差过大,合理的设计应该兼顾这两方面的要求。 准确性用稳态误差来衡量。在给定输入信号作用下,当系统达到稳态后,其实际输出与所期望的输出之差叫做给定稳态误差。显然,这种误差越小,表示系统的精度 第三章作业 3-1 已知二阶系统闭环传递函数为 36 936 2 ++= s s G B 。 试求单位阶跃响应的t r , t m ,δ% , t s 的数值? 3-2 设单位反馈系统的开环传递函数为 ) 1(1 )(+= s s s G K 试求系统的性能指标,峰值时间,超调量和调节时间。 3-3 如图1所示系统,假设该系统在单位阶跃响应中的超调量%δ=25%,峰值时间 m t =0.5秒,试确定K 和τ的值。 图1 3-4 已知系统的结构图如图2所示,若)(12)(t t x ?= 时,试求: (1) 当τ=0时,系统的t r , t m , t s 的值。 (2) 当τ≠0时,若使δ%=20%,τ应为多大。 图2 3-5 (1) 什么叫时间响应 (2) 时间响应由哪几部份组成?各部份的定义是什么? (3) 系统的单位阶跃响应曲线各部分反映系统哪些方面的性能? (4) 时域瞬态响应性能指标有哪些?它们反映系统哪些方面的性能? 3-6设系统的特征方程式为 06111262 3 4 =++++s s s s 试判别系统的稳定性。 3-7设系统的特征方程式为 0222 3 =+++s s s 3-8 单位反馈系统的开环传递函数为 ) 125.0)(11.0()(++= s s s K s G k 试求k 的稳定范围。 3-9 (1) 系统的稳定性定义是什么? (2) 系统稳定的充分和必要条件是什么? (3) 误差及稳态误差的定义是什么? 3-10已知单位反馈随动系统如图3所示。若16=K ,s T 25.0=。试求: (1)典型二阶系统的特征参数ζ和n ω; (2)暂态特性指标p M 和)5(00 s t ; (3)欲使 016=p M ,当T 不变时,K 应取何值。 图3随动系统结构图 3-11控制系统框图如图4所示。要求系统单位阶跃响应的超调量% 5.9=p M ,且峰值时 间 s t p 5.0=。试确定1K 与τ的值,并计算在此情况下系统上升时间r t 和调整时间)2 (00s t 。 图4 控制系统框图 3-12设系统的特征方程式分别为 1.05432234=++++s s s s 2.01222 34=++++s s s s 3.022332 345=+++++s s s s s 试用劳斯稳定判据判断系统的稳定性。 3-13已知系统结构图如图5所示,试确定使系统稳定的K 值范围。 北理工《自动控制理论2》在线作业 -0001 试卷总分:100 得分:0 一、单选题(共10 道试题,共30 分) 1.基于能量的稳定性理论是由()构建的。 A.Lyapunov B.Kalman C.Routh D.Nyquist 正确答案:A 2.引入状态反馈的目的是()。 A.配置系统的极点 B.改变系统的能控性 C.改变系统的能观性 D.使得系统能观 正确答案:A 3.齐次状态方程就是指状态方程中不考虑()的作用。 A.输入 B.输出 C.状态 D.系统 正确答案:A 4.对于单变量系统,特征方程的根就是传递函数的()。 A.零点 B.极点 C.拐点 D.死点 正确答案:B 5.齐次状态方程的解就是系统在无外力作用下由初始条件引起的()。 A.自由运动 B.强迫运动 C.离心运动 D.旋转运动 正确答案:A 6.线性系统的系数矩阵A如果是非奇异的,则系统存在()平衡点。 A.一个 B.两个 C.三个 D.无穷多个 正确答案:A 7.原系统的维数是n,则全维状态观测器的维数是()。 A.2n B.n C.3n D.n-1 正确答案:A 8.能够完整的描述系统运动状态的最小个数的一组变量称为()。 A.状态变量 B.状态空间 C.状态方程 D.输出方程 正确答案:A 9.由初始状态所引起的自由运动称为状态的()。 A.零输入响应 B.零状态响应 C.输入响应 D.输出响应 正确答案:A 10.以状态变量为坐标轴所构成的空间,称为()。 A.状态变量 B.状态空间 C.状态方程 D.输出方程 正确答案:B 二、多选题(共10 道试题,共30 分) 1.由动态方程导出可约传递函数时,表明系统是()。 A.可控不可观测 B.可观测不可控 C.不可控不可观测 2010年网络学院《管理沟通》作业 班级:广珠东直属班专业:行政管理层次:高起专 姓名:沙文婷学号:200915123063038 一、案例分析(40分) 管理沟通案例分析之一——被拒绝的计划(人际沟通) 下面的谈话发生在一家大公司的两名员工之间。阅读完后,请你回答下面提出的问题。 刘伟(刘):昨天与毛石农(注:公司市场部经理)的会谈怎样? 赵国栋(赵):嗯——啊——这不是很重要。 刘:看起来你心情很不好 赵:是的。这次会谈几乎是完全失败的,让我说,我希望将这件事忘了。 刘:事情往往不像我们想象的那样。 赵:对极了,对那家伙抱希望简直不可能。我认为上交的计划是非常清楚而周到的,但他全盘否定了。 刘:你说他一点都不接受。 赵:对。 刘:老赵,我们以前见过你的工作,你总是一流的。我很难想象你的计划被毛石农否决。他怎么说的? 赵:他说不现实,很难实施…… 刘:真的吗? 赵:真的,当他这么说时,我觉得他实在对我进行人身攻击。但另一方面,我也很恼怒,因为我认为我的计划很好,要知道,我对计划中的每一个细节都花了巨大精力。 刘:我能肯定。 赵:对我真是一个打击 刘:我敢打赌,遇到这种事,我也会沮丧的。 赵:毛石农肯定有些什么事要反对我 刘:尽管你对这些计划尽了很大努力,但还是不能分辨毛石农的行为到底是反对你,还是反对你的计划,对吗? 赵:对,你又能怎样分辨呢? 刘:我完全能理解你的困惑与迷惑,你感到毛石农的行为是不合情理的。 赵:我只是不明白他为什么要这么做。 刘:当然。如果他说你的计划不切实际,那他到底是什么意思。我的意思是,你是如何去处理这样一个基本问题的?这也许太笼统了。他是否提了一些具体的事件?你有没有要他指出问题或要他将反对的原因说得更具体一些呢? 赵:好主意,但你知道——受到拒绝,我是多么失望,简直就像在云里雾里,你明白我的意思吗? 刘:是的,那是一次不成功的经历。你是那么的自尊,以至于想通过尽快放弃计划来挽回留下的一点自尊。 赵:对极了,我只想在我说出令人后悔的话之前,尽快逃离那里。 第三章 3-1已知二阶系统闭环传递函数为G B36。 s29s 36 t r , t m ,δ% , t s 的数值? 试求单位阶跃响应的 解:[ 题意分析 ] 这是一道典型二阶系统求性能指标的例题。解法是把给定的闭环传递函数与二阶系统闭环传递函数标准形式进行对比,求出n 参数,而后把n 代入性能指标公式中求出 t r, t m,% ,t s和 N 的数值。 n366(弧度 /秒) 9 0.75 2 n 120.66 d n tg 1 1 1 2 3.97(弧度/秒) 2 41.410.72 (弧度) 上升时间t r t r d 峰值时间t m 3.140.72 秒 0.61 3.97 t m 3.14 0.79秒 3.97 d 过度过程时间 t s 44 0.89秒(2%) t s 0.756 n 33 0.70秒(5 %) t s 0.756 n 超调量δ% % e 12 0.75 e 0.66100% 2.8% 100% 3-2设单位反馈系统的开环传递函数为 G K (s) 1 s(s1) 试求系统的性能指标,峰值时间,超调量和调节时间。 解: [ 题意分析 ] 这是一道给定了开环传递函数 , 求二阶系统性能指标的练习题。在这里 要抓住二阶系统闭环传递函数的标准形式与参数 ( , n ) 的对应关系,然后确定用哪一组 公式去求性能指标。 根据题目给出条件可知闭环传递函数为 G B (s) Y (s) 1 X (s) s 2 s 1 2 2 与二阶系统传递函数标准形式 n 2 相比较可得 1, 2 n 1 , 即 2 2 n s n s n n =1, =。由此可知,系统为欠阻尼状态。 故,单位阶跃响应的性能指标为 t m 秒 3.63 n 1 2 1 2 % e 100% 16.4% t s ( 2%) 4 4 秒 0.5 1 8 n 3 3 秒 t s (5%) 0.5 6 n 1 3-3 如图 1 所示系统,假设该系统在单位阶跃响应中的超调量 % =25%,峰值时间 t m = 秒,试确定 K 和τ的值。 X(s) Y(s) k s( s 1) s 1 图 1 解: [ 题意分析 ] 这是一道由性能指标反求参数的题目,关键是找出: K, τ与 , n 的 关系; % , t m 与 , n 的关系;通过 , n 把 % , t m 与 K, τ联系起 来。 由系统结构图可得闭环传递函数为 Y (s) K K G B ( s) s(s 1) K ( s 1) s 2 (1 K )s K X (s) 与二阶系统传递函数标准形式相比较,可得 2 K ; 2 n 1 K 或 2 n 1 n 2 n 与上司沟通的心得体会 案例背景:这件事是发生去年,我当时应聘一个公司的行政助理,公司为了激励员工,制定了一项去山东青岛旅游的计划,我们部门名额限定3人,但是部门里有5名员工都想去,我需要向主管申请2个名额。我作为代表,与主管进行沟通。我对主管说:“主管,我们部门5个人都想去青岛,可只有3个名额,剩余的2个人会有意见,能不能再给2个名额?”主管说:“筛选一下不就可以了吗?公司那么多人,如果我们部门增加两个人,那其他的部门会怎么看?这样,公司的花费就会增多,领导会不高兴的。” 沟通失败的原因:我分析一下沟通失败的可能原因:首先,我只表达了自己的意志和愿望,忽视了对方的心里反应。主管可能不想与领导的决定有分歧和冲突。其次,没有铺垫式的陈诉我的观点,表达过于直接。经过思考之后,我再次去找了主管,谈论了旅游的事,并且我带着解决办法去的。 成功沟通的过程:第二天,我看见主管很高兴,就主动和他打招呼,聊聊天。接着就聊到了旅游的事。我说:“大家听说去旅游,都非常高兴,也很感兴趣很期待,都在说我们公司越来越重视员工了。领导不忘员工,真让员工感动。”主管说,真的是想给大家一个惊喜,连续加班一个月,大家都很辛苦,五一让大家放松放松。放松后,大家才能更好地工作。此外,也是为了增加公司的凝聚力,大家高兴了,我们的目的也达到了,就是让大家高兴的。我说:“也许大家前一段太忙了,都想出去放松放松,这三个名额的竞争太激烈了。”主管说:“当时决定3个名额是因为我们部门有两个人工作不够积极,这次不安排他们,是给他们一个提醒吧。我说:“我也同意主管的看法,他们两个与其他的人比起来确实不够积极,小赵失恋了,一直在伤心,没有走出来。小刘是家里出了点事,难免影响了工作。如果再不让他们去旅游,这对他们的打击太大了。公司花了那么多钱,不能因为这几个名额而把大家的工作积极性都降低了,这样损失太大了。小赵和小刘工作经验丰富,以前的在我们部门的工作已多次被领导表扬,深得领导的重视。如果公司能够拿出两个名额的费用,让他们有所感悟,促使他们积极工作,它们所带来的利益要远远大于这部分的支出的费用,不知道我说的有没有道 第九章 线性系统的状态空间分析与综合 9-1 设系统的微分方程为 u x x x =++23&&& 其中u 为输入量,x 为输出量。 ⑴ 设状态变量x x =1,x x &=2,试列写动态方程; ⑵ 设状态变换211x x x +=,2122x x x --=,试确定变换矩阵T 及变换后的动态方程。 解:⑴ u x x x x ??????+????????????--=???? ??1032102121&&,[]??????=2101x x y ; ⑵ ??????=??????2121x x T x x ,??????--=2111T ;?? ????--=-11121 T ;AT T A 1-=,B T B 1-=,CT C =; 得,??????--=2111T ;u x x x x ??????-+??????????? ?-=??????1110012121&&,[]??????=2111x x y 。 9-2 设系统的微分方程为 u y y y y 66116=+++&&&&&& 其中u 、y 分别系统为输入、输出量。试列写可控标准型(即A 为友矩阵)及可观标准型(即A 为友矩 阵转置)状态空间表达式,并画出状态变量图。 解:可控标准型和可观标准型状态空间表达式依次为, []x y u x x 00610061161 00010=??????????+??????????---=&;[]x y u x x 100 006610 1101600=???? ? ?????+??????? ???---=&; 可控标准型和可观标准型的状态变量图依次为, 9-3 已知系统结构图如图所示,其状态变量为1x 、2x 、3x 。试求动态方程,并画出状态变量图。 解:由图中信号关系得,31x x =&,u x x x 232212+--=&,32332x x x -=&,1x y =。动态方程为 u x x ?? ?? ? ?????+??????????---=020*********&,[]x y 001; 自动控制原理作业 1、 解 :当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。系统方框图如下图所示。 2、 解:加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。炉子的实际温度用热电偶测量,输出电压 f u 。f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。 在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程: 控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。 ?→T C ?→↑→↑→↑→↑→↑→↓→↓T u u u u u c a e f θ1C ↑ 系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征炉温的希望值)。系统方框图为: 3、 解 在本系统中,蒸汽机是被控对象,蒸汽机的转速ω是被控量,给定量是设定的蒸汽机希望转速。离心调速器感受转速大小并转换成套筒的位移量,经杠杆传调节供汽阀门,控制蒸汽机的转速,从而构成闭环控制系统。 系统方框图如图所示。 4、 中国地质大学(武汉)远程与继续教育学院 自动控制理论 课程作业2(共 4 次作业) 学习层次:专升本 涉及章节:第3章 1系统的结构图如图所示. s(s+1) R(s) C(s) K -1+AS 要求系统具有性能指标:20%,1p t s σ==. 试确定系统参数K 和A. 2 系统结构图如图所示: K R(s) C(s) -10s(s+1) τs + - 要求该系统的单位阶跃响应c(t)具有超调量%=16.3%和峰值时间t p =1秒。 试确定K 及值。 3 已知三阶系统的特征方程为:323210 0a s a s a s a +++= 试用Routh 代数判据,确定系统稳定的充要条件。 4 已知系统的闭环特征方程为: 54323122432480s s s s s +++++= 试求系统在s 右半平面的根数及虚根值。 5 设某单位反馈系统的开环传递函数为 (1) ()(1)(21) K s G s s Ts s += ++ 试用胡尔维茨稳定判据确定使闭环系统稳定的K 及T 的取值范围。 6系统结构图如图所示: 试用Routh 判据分析该闭环系统的稳定性。 7 已知单位反馈系统的开环传递函数为:K G(s)= s(0.1s+1)(0.25s+1) 试确定使系统稳定的开环放大系数K 的取值范围及临界稳定时的K 值。 8 系统的结构图如下. 已知参数0.2,86.6n ξω== 试确定参数1K 取何值时系统方能稳定. 9 设单位反馈系统的开环传递函数为24 ()(2)(3) G s s s s = ++ 试求系统的静态位置误差系数Kp ,静态速度误差速度系数Kv 和静态加速度误差系数Ka 。 10 单位负反馈系统的开环传递函数为5 ()(1) G s s s = +。 北理工《自动控制理论1 》在线作业-0002 试卷总分:100 得分:0 一、单选题(共20 道试题,共60 分) 1.主导极点的特点是()。 A.距离虚轴很近 B.距离实轴很近 C.距离虚轴很远 D.距离实轴很远 正确答案:A 2.系统的频率特性() A.是频率的函数 B.与输入幅值有关 C.与输出有关 D.与时间t有关 正确答案:A 3.单位反馈系统的开环传递函数G(s)=16/(s(s+4*sqrt(2))),其幅值裕度h等于() A.0 B.4sqrt(2)dB C.16dB D.无穷 正确答案:D 4.系统对输入信号的时域响应中,其调整时间的长短是与()指标密切相关。 A.允许的峰值时间 B.允许的超调量 C.允许的上升时间 D.允许的稳态误差 正确答案:D 5.系统型次越高,稳态误差越()。 A.越小 B.越大 C.不变 D.无法确定 正确答案:A 6.用实验法求取系统的幅频特性时,一般是通过改变输入信号的()来求得输出信号的幅 值。 A.相位 B.频率 C.稳定裕量 D.时间常数 正确答案:B 7.系统的传递函数在右半S平面上没有零点和极点,则该系统称作()。 A.非最小相位系统 B.最小相位系统 C.不稳定系统 D.振荡系统 正确答案:B 8.适合应用传递函数的系统是()。 A.单输入,单输出的线性定常系统 B.单输入,单输出的线性时变系统 C.单输入,单输出的定常系统 D.非线性系统 正确答案:A 9.已知串联校正装置的传递函数为0.2(s+5)/(s+10),则它是() A.相位迟后校正 B.迟后超前校正 C.相位超前校正 D.A、B、C都不是 正确答案:C 10.二阶系统的调整时间长,则说明()。 A.系统响应快 B.系统响应慢 C.系统的稳定性差 D.系统的精度差 正确答案:B 11.典型二阶系统的超调量越大,反映出系统() A.频率特性的谐振峰值越小 B.阻尼比越大 C.闭环增益越大 考生答题情况 作业名称:2015年秋季网上作业1 出卷人:SA 作业总分:100 通过分数:60 起止时间:2015-10-21 1:40:38 至2015-10-21 2:13:48 学员姓名:qxyuanziyun 学员成绩:95 标准题总分:100 标准题得分:95 详细信息: 题号:1 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: 是否应该对下属公开赞美,以下哪一种说法正确( )。 A、公开赞扬最好是能被大家认同及公正评价的事项。 B、尽可能公开赞美,这样激励力度更大。 C、不能公开赞美,这容易引起其他下属心态不平衡。 标准答案:A 学员答案:A 本题得分:5 题号:2 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: 组织中的纵向沟通包括( )。 A、斜向沟通和外向沟通 B、上行沟通和下行沟通 C、人际沟通和群体沟通 标准答案:B 学员答案:B 本题得分:5 题号:3 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: 以下不是有效的反馈特征的是( )。 A、反馈要使用具体明确、不笼统抽象和带有成见的语言。 B、反馈的态度应是支持性的和坦诚的。 C、要抓住对方说话的漏洞,及时驳斥。 标准答案:C 学员答案:C 本题得分:5 题号:4 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: 关于人际沟通特点的表述,不正确的一项是( )。 A、沟通双方要有共同的沟通动机,沟通双方都是积极的参与者。 B、沟通双方要有相通的知识和经验,才会有“共同的语言”。 C、人际沟通的障碍主要来自交流双方对交往情境缺乏统一的理解,但与个体心理特征差异无关。 标准答案:C 学员答案:C 本题得分:5 题号:5 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: 关于组织中的“小道消息”,正确的看法是( )。 A、“小道消息”有害无益,组织应竭力避免。 B、“小道消息”是一种负面现象,它具有消极性,会影响组织的凝聚力。 C、“小道消息”具有积极面,只要管理层加以重视并适当引导,它便会产生积极的效果。 标准答案:C 学员答案:C 本题得分:5 题号:6 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: 管理文体常用的表达方式是( )。 A、叙述、说明、描写 B、叙述、说明、议论 C、说明、议论、抒情 标准答案:B 学员答案:B 本题得分:5 题号:7 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: 以下关于管理沟通的特点,表述不正确的是( )。 A、管理沟通的对象、主体限于管理者与被管理者之间。 B、管理沟通除了存在于组织或企业内部之外,更存在于企业或组织的外部。 C、管理沟通有多种多样的具体方法和形式。 标准答案:A 学员答案:A 本题得分:5 题号:8 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: 以下适合采用口头指示的是( )。 A、上、下级之间信任程度较高,持久性好。 1-13 对自动控制系统基本的性能要求是什么?最主要的要求是什么?并叙述其内容。 答:稳定性;快速性;准确性。 最主要的要求是稳定性。(叙述其内容在书上第六页。) 1-8 一晶体管稳压电源如图1-3所示。试画出其方框图,说明该电路的工作原理,并说明在该电路图中哪些元件起测量﹑放大﹑执行的作用,以及系统的干扰量和给定量是 什么? 1-3晶体管稳压电路 答: 是给定量 是放大 是执行 是测量 BG1 BG2 R 1 R 2 BG2 BG1 U sr U w 因为:(当输出电压Usc 下降的时候,通过R1 、R2组成的分压电路的作 用,BG2 的基极电位Ub2也下降了。由于基准电压UW 使BG2 的发射极电位保持不变,Ubc2 =Ub2一UW 随之减小。于是BG2 集电极电流Ic2减小,Uc2增高,即BG1 的基极电位Ub1增高,使Icl 增加,管压降Uce1减小,从而导致输出电压Usc =Usr 一Uce1保持基本稳定。BG2 的放大倍数越大,调整作用就越强,输出电压就越稳定。如果输出电压Usc 增高时,同样道理,又会通过反馈作用使Usc 减小,保持输出电压基本不变。 ) 方框图如下: 1.一个水池水位自动控制系统如图1-1所示。试简述系统工作原理,指出主要变量和各环节的构成,画出系统的方框图。 电动机 图1-1 水池水位控制系统原理图 解 在这个水位控制系统中,水池的进水量1Q 来自由电机控制开度的进水阀门,出水量2Q 随 意变化的情况下,保持水箱水位在希望的高度上不变。 希望水位高度由电位器触头A 设定,浮子测出实际水位高度。由浮子带动的电位计触头B 的位置反映实际水位高度。A 、B 两点的电位差AB U 反映希望水位的偏差。当实际低于希望水位时,0AB U >。通过放大器驱动电动机转动,开大进水阀门,使进水量1Q 增加,从而使水位上升。当实际水位上升到希望位置时,A 、B 两个触头在同一位置,0AB U =,电动机停止转动,进水阀门开度不变,这时进水量1Q 和出水量2Q 达到平衡位置。若实际水位高于 希望水位,0AB U <,则电动机使进水阀门关小,使进水量减少,实际水位下降。 (5分) 这个系统是个典型的镇定系统,在该系统中: 控制量 希望水位的设定值 被控制量 实际水位 扰动量 出水量2Q MBA管理沟通作业 1、什么是小道消息? 小道消息,是在私下里传播的消息。人们经常接受和传播小道消息,有人为之欢欣鼓舞,有人为之扼腕叹息。小道消息是一把双刃剑,既可怕,又神奇。 小道消息是社会的必然产物。从客观上讲,一是社会媒介不能快速充分地传播人们所需要的全部信息,需要小道消息作为补充;二是有些消息不便或不宜以公开的方式传播,只能只能采取隐蔽的形式。从主观上讲,人们有强烈的求知欲和猎奇心理,有抢先知道隐情和透露内幕消息的冲动。 小道消息能形成强大的社会舆论压力。小道消息具有扶正祛邪、针贬时弊的作用。俗话说:好事不出门,坏事传千里。小道消息大面积地迅速传播,对犯事者名誉的影响是巨大的,因而能对不良行为起到有效的警戒和惩罚作用。小道消息也会以讹传讹,混淆视听。小道消息是私下里的个人行为,囿于个人的检验手段、判断能力和道德品质的欠缺,小道消息很难充分保证其客观性和全面性,因而就会经常出现张冠李戴、甚至无中生有的错误。人格低下的人则有可能恶意制造不负责任的小道消息。不合实际的小道消息对无辜者的打击比公开的抨击要大得多,因为小道消息的传播是分散的、隐蔽的,因而,它既很难找到侵权的元凶,也很难提供申辩的机会和场合。古人云:三人成虎。说的人多了,莫须有的东西就会成铁板钉钉的事实。古人又曰:众口铄金。众口一词,连金子也可以被消融,而况人乎?对那些别有用心的小道消息,人们把它称之为流言蜚语。流言蜚语的可怕,就在于它不是光明正大地批评,而是耍阴谋诡计,叫你百口难辩,徒唤奈何。小道消息虽然能将对手置于非常尴尬的境地,但如果老是沉湎于搜集和传播小道消息,就会成为无聊的人。因为小道消息毕竟上不得台面,许多人对此不屑一顾。东家长、西家短的“长舌妇”就往往不受人欢迎。 2、你在本单位听过什么样的小道消息? 关于应聘处级干部的消息。 3、该小道消息是如何传播的? 背地里说人家闲话、好奇心、窥探利益寄得人的隐私 浙江大学远程教育学院 《控制理论》课程作业 姓名:郭超学号:712128202045 年级:2012秋学习中心:华家池————————————————————————————— 第一章 1-1 与开环系统相比,闭环系统的最大特点是:检测偏差,纠正偏差。 1-2 分析一个控制系统从以下三方面分析:稳定性、准确性、快速性。 1-3 控制系统分为两种基本形式开环系统和闭环系统。 1-4 负正反馈如何定义? 解:将反馈环节取得的实际输出信号加以处理,并在输入信号中减去这样的反馈量,再将结果输入到控制器中去控制被控对象,我们称这样的反馈是负反馈;反之,若由输入量和反馈相加作为控制器的输入,则称为正反馈。 1-5 若组成控制系统的元件都具有线性特性,则称为线性控制系统。 1-6 控制系统中各部分的信号都是时间的连续函数,则称为连续控制系统。 1-7 在控制系统各部分的信号中只要有一个信号是时间的离散信号,则称此系统为离散控制系统。 1-8控制系统一般可分为两种基本结构:开环控制、闭环控制;控制系统可进行不同的分类:线性系统与非线性系统_; 恒值系统与随动系统;连续系统与离散系统。 1-9请画出闭环控制系统的结构原理图,并简要介绍各部分的主要作用。 图1 闭环控制系统 系统的控制器和控制对象共同构成了前向通道,而反馈装置构成了系统的反馈通道。 1-10 控制系统的性能要求一般有稳定性、准确性和快速性;常见的线性定常系统的稳 定性判据有劳斯判据和乃奎斯特判据。 第二章 2-1 如图1所示,分别用方框图简化法或梅逊公式计算传递函数 () () C s R s (写出推导过程)。 1 方框图简化 (a) (b) 图1 红色为重点(2016年考题) 第一章 1-2 仓库大门自动控制系统原理示意图。试说明系统自动控制大门开闭的工作原理,并画出系统方框图。 解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机反转带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。系统方框图如下图所示。 1-4 题1-4图为水温控制系统示意图。冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。冷水流量变化用流量计测量。试绘制系统方块图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么? 解工作原理:温度传感器不断测量交换器出口处的实际水温,并在温度控制器中与给定温度相比较,若低于给定温度,其偏差值使蒸汽阀门开大,进入热交换器的蒸汽量加大,热水温度升高,直至偏差为零。如果由于某种原因,冷水流量加大,则流量值由流量计测得,通过温度控制器,开大阀门,使蒸汽量增加,提前进行控制,实现按冷水流量进行顺馈补偿,保证热交换器出口的水温不发生大的波动。 其中,热交换器是被控对象,实际热水温度为被控量,给定量(希望温度)在控制器中设定;冷水流量是干扰量。 系统方块图如下图所示。这是一个按干扰补偿的复合控制系统。 1-5图为工业炉温自动控制系统的工作原理图。分析系统的工作原理,指出被控对象、被控量及各部件的作用,画出系统方框图。 解加热炉采用电加热方式运行,加热器所产生的热量与调压器电压Uc的平方成正比,Uc增高,炉温就上升,Uc 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。炉子的实际温度用热电偶测量,输出电压Uf。Uf作为系统的反馈电压与给定电压Ur进行比较,得出偏差电压Ue,经电压放大器、功率放大器放大成au后,作为控制电动机的电枢电压。 在正常情况下,炉温等于某个期望值T°C,热电偶的输出电压Uf正好等于给定电压Ur。此时,Ue=Ur-Uf=0,故U1=Ua=0,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使Uc保持一定的数值。这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉膛温度T°C由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程,控制的结果是使炉膛温度回升,直至T°C的实际值等于期望值为止。 1.【全部章节】利用matlab进行控制系统实验属于:? A 物理仿真 ? B 半物理仿真 ? C 数字仿真 ? D 实物验证 单选题 2.【全部章节】控制系统性能分析,一般不包括: ? A 快速性 ? B 准确性 ? C 稳定性 ? D 可实现性 单选题 3.【全部章节】不属于非线性特性的是: ? A 齐次性 ? B 饱和特性 ? C 继电器特性 ? D 死区特性 单选题 4.【全部章节】下列不属于测试控制系统频率特性的方法的是: ? A 劳斯判据 ? B 输人输出曲线直接记录法 ? C 李沙育图形法 ? D 补偿法 单选题 5.【全部章节】理想运算放大器的满足条件不包括: ? A 放大倍数为无限大 ? B 开环输入阻抗为0,输出阻抗无限大 ? C 通频带无限大 ? D 输入输出呈线性特性 单选题 6.【全部章节】伺服电机由于要克服摩擦和负载转矩,需要有一定的启 动电压,这反映了电机的: ? A 齐次性 ? B 饱和特性 ? C 继电器特性 ? D 死区特性 单选题 7.【全部章节】1惯性环节2积分环节3比例积分环节4比例积分微分 环节, 其中属于典型环节的是: ? A 13 ? B 234 ? C 123 ? D 1234 判断题 8.【全部章节】根据系统模型设计的模拟电路图是唯一的。 ?正确错误 判断题 9.【全部章节】物理仿真只能用缩小了的尺寸,制作与系统原型相同的 模型,模型的变量与真实系统的变量完全一致。 ?正确错误 判断题 10.【全部章节】一般来说控制系统的模拟方法有两种:一种是根据系 统的微分方程进行模拟;一种是根据系统的方框图进行模拟。 ?正确错误 判断题 11.【全部章节】微分方程模拟的基本原理就是采用逐项微分法。 ?正确错误 判断题 12.【全部章节】MATLAB与Basic、Fortran以及C语言比较,语法 规则更简单,编程特点更贴近人的思维方式,在工程计算方面的编程效率高于其它编程语言。 ?正确错误 《自动控制原理》习题解答 第一章习题及答案 1-1 根据题1-1图所示的电动机速度控制系统工作原理图 (1) 将a ,b 与c ,d 用线连接成负反馈状态; (2) 画出系统方框图。 解 (1)负反馈连接方式为:d a ?,c b ?; (2)系统方框图如图解1-1 所示。 1-2 题1-2图是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开闭的工作原理,并画出系统方框图。 题1-2图 仓库大门自动开闭控制系统 解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大 门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。系统方框图如图解1-2所示。 1-3 题1-3图为工业炉温自动控制系统的工作原理图。分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。 题1-3图 炉温自动控制系统原理图 解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比, c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动 机驱动。炉子的实际温度用热电偶测量,输出电压f u 。 f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。 在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程: 控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。大工17春《管理沟通》离线作业
控制理论作业二答案
自动控制原理课后习题答案
控制理论作业二
北理工《自动控制理论2》在线作业1答案
管理沟通案例分析作业
控制理论作业二答案.docx
管理沟通案例分析作业
(精选)现代控制理论作业题答案
自动控制原理作业
自动控制理论阶段性作业
北理工《自动控制理论1 》在线作业1答案
管理沟通 作业1
自动控制理论第一章作业及答案
管理沟通作业
控制理论离线作业答案
自动控制原理作业答案
浙大远程《控制理论》在线作业答案
自动控制原理习题1(含答案)
相关主题
文本预览