
定位系统的设计与实现
本文实现的定位系统针对室外环境及办公室环境的实现的定位应用,通过对场景中人员、物品进行定位,方便用户对目标的实时监测和管理。
上位机开发环境为MFC (Microsoft Foundation Classes),它是一个微软公司提
供的类库,以C++类的形式封装了Windows API ,并且包含一个应用程序框架,以减少应用程序开发人员的工作量。其中包含的类包含大量Windows 句柄封装类和很多Windows 的内建控件和组件的封装类。它的详细介绍在这里就不赘述了。下面对本定位系统的具体实现过程进行比较详细的描述。
1.1 定位系统结构
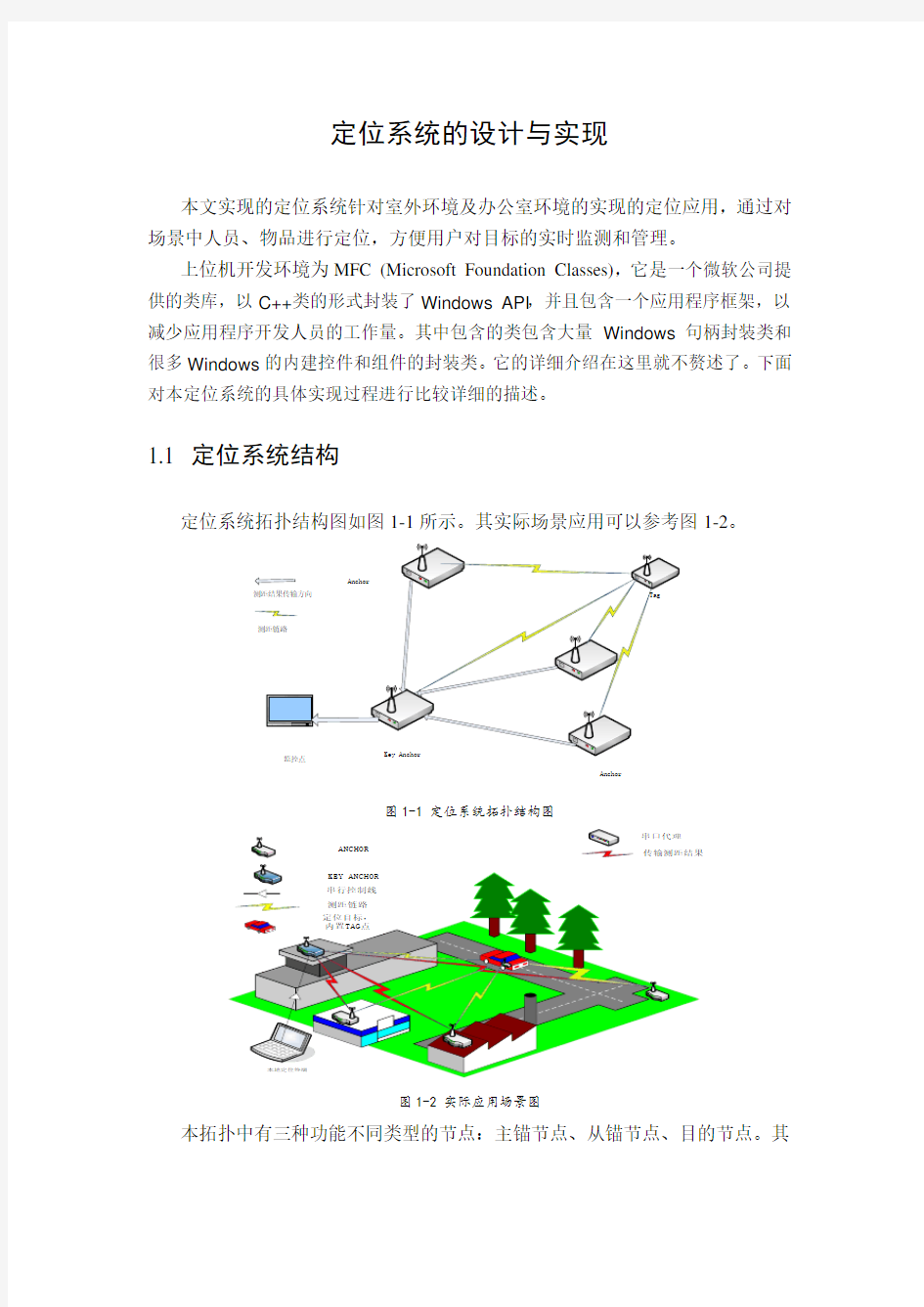
定位系统拓扑结构图如图1-1所示。其实际场景应用可以参考图1-2。
Anchor
图1-1 定位系统拓扑结构图
ANCHOR
串口代理
传输测距结果
图1-2 实际应用场景图
本拓扑中有三种功能不同类型的节点:主锚节点、从锚节点、目的节点。其
中主锚节点和从锚节点是一类已知自身位置坐标信息的固定节点,它们的任务是获取包含距离信息以及信号强度值的数据包。目的节点是可以自由移动的节点,可以在一定范围内自由移动,定位系统的最终目的就是获取该类节点位置的坐标信息;从锚节点负责发起测距请求,将测距信息发往目的节点,得到从锚节点与目的节点的距离信息以及信号强度信息,并将该信息发往主锚节点。主锚节点在整个系统中起着至关重要的作用,首先它要响应上位机发出的命令,确定要定位的目标,并发出指令,命令从锚节点对目标节点进行测距;其次主锚节点不仅要获取自身与目标节点的距离信息以及信号强度信息,还需要协调控制三个从锚节点,接受从锚节点发回的测距信息;最后主锚节点负责并将这些信息送还给上位机软件处理。目的节点实时监测是否有定位请求并配合锚节点测出响应的距离信息以及信号强度信息;
本定位系统主要包括四大块:硬件节点、硬件节点软件、上位机监测软件以及显示模块。每一部分设计都有其特殊性,硬件节点为系统提供了定位所需的硬件平台,是信息采集的基础,第三章已经详细介绍其性能,这里不再赘述。硬件节点软件主要完成了节点间的链路建立和数据采集与传输。上位机软件首先通过有线方式(使用串口)接收由定位硬件节点采集到的相关信息,然后对所采集的定位信息进行处理,最后选用合适的定位算法,计算出目标节点在该参考系的坐标。显示模块负责动态显示节点定位效果,免去人工思考数字坐标所代表的具体意义,是定位软件人性化设计的一个体现。图1-3为系统整体程序流程图;
图1-3系统整体程序流程图
下面分别详细介绍余下的三个模块。
1.2 硬件节点软件
本定位系统的基本思想是主锚节点收集所有的从锚节点到目标节点以及自身到目标节点的距离信息以及信号强度(RSSI),由主锚节点将信息传送到上位机监测软件,上位机软件调用相应的定位算法,计算出目标节点的坐标位置并实现必要的显示。因此,首先需要在硬件平台上实现节点间的通信,本文采用星形拓扑结构,这种网络拓扑组建简单,并且便于数据采集。主锚节点担当中心节点的角色,以轮询的方式发送测距命令,这样实际在同一时间段内只有一对节点在工作。避免了因冲突造成的处理时延单方向增加,导致定位结果不准确。可参考图1-1。因为本系统采用的nanoPAN5032模块自身并没有组网功能。所以需要作者自己重新编写代码以实现组网功能。通信流程如图1-4:
图 1-4 通信流程图
其具体实现过程如下:
(1)主锚节点接受定位命令。主锚节点要获取节点的位置信息,就要循环给所有从锚节点发送测距请求信号,通信方式为轮询方式。保证所有的从锚节点都可收到该测距请求。反复获取所有锚节点与目标节点的距离以及信号强度信息;
(2)从锚节点收到测距请求。从锚节点向目标节点发送测距请求,目标节点如果在该区域内,收到该请求就与该锚节点发生点到点的通信,经过一个SDS-TWR 测距过程以后,从锚节点将获取到的相应的距离信息以及信号强度信息发送给主锚节点;
(3)主锚节点一旦受到测距信息,就将这些信息传到上位机监测软件中,由检测软件的缓存暂时保存这些数据,以便以后的定位计算;
1.2.1 主锚节点程序设计
主锚节点除了要完成从锚节点的主体功能外,还负责整个通信的协调工作以及将数据传送给上位机,给定位软件提供所需的定位信息。下面简要介绍下主锚节点的程序设计。图1-5所示为主锚节点的软件流程图。
图1-5 主锚节点的流程图
其中,系统初始化主要是系统的一些硬件管脚、串口、时钟等进行初始化配置。然后进入死循环,监测上位机命令。监测命令主要通过读取串口信息来实现,如果收到信息,首先进行命令格式检测,如果正确,再判断是什么命令。假如为定位命令,则自身发出测距请求然后命令其余三个锚节点依次对目标节点发出测距请求,这种拓扑结构不仅很容易搭建,而且也避免由于处理冲突导致处理时延增大,导致测距结果变大;
int main(void)
{ …………………………………….
RCC_Configuration(); /* Configure the system clocks */
NVIC_Configuration(); /* NVIC Configuration */
GPIO_Configuration(); /* Configure the GPIOs */
USART_Configuration(); /* Configure the USART1 */ SysTick_Config(); /* Configure the systick */
nano_main(NULL,NULL);
…………………………
}
其中nano_main()部分代码如下:
int nano_main(int ac, char *av[])
{
…………………………
while(1)
{
……………………….
while(SendTimingDelay > 0)//限定最大发送测距请求次数
{
receivedate=0; //是否收到数据的状态
PollApplication();
Delay(200);
NTRXUpdate();
if(receivedate==1)
break;
SendTimingDelay--;
}
SendTimingDelay =3;
for(;i { while(SendTimingDelay != 0) { receivedate=0; Appsendmessage(addr[i],payload[i], 10); Delay(200); NTRXReceivecommand(); if(receivedate==1) break; SendTimingDelay--; } SendTimingDelay =3; } …………………………………… } 1.2.2 从锚节点程序设计 下面简要介绍下从锚节点的程序设计。图1-6为从锚节点的流程图。 图1-6从锚节点的流程图 其中,系统初始化和主锚节点一样。进入死循环,监测来自主锚节点的命令;如果收到信息,首先进行命令格式检测,如果正确,再判断是什么命令。假如为定位命令,则对目标节点发出测距请求。将得到的结果封包发送给主锚节点; 1.2.3 目标节点程序设计 下面简要介绍下从锚节点的程序设计。图1-7为目标节点的流程图。 图1-7 目标节点的流程图 其中,系统初始化和主锚节点一样。进入死循环,监测来自锚节点的测距命令;如果收到信息。首先进行命令格式检测,如果正确,就继续和锚节点通信,开始测距任务,并由锚节点收集测距信息。 1.3 上位机软件设计 定位系统上位机监控软件中,主要包括以下几个功能:串口通信、数据处理、定位计算等三个主要模块。串口通信是上位机监测与控制硬件节点的唯一通道。所有的指令发出以及信息获取都是通过串口来实现的;数据处理主要负责将串口收集到的原始数据加以处理,最大程度还原真实的距离信息,以便定位算法能够算出准确的目的节点坐标;定位算法主要负责将处理过的数据转换为参考坐标系的坐标。这里的参考坐标系是建立在人工测定的几个锚节点的相对位置的基础上的,下面分别介绍这三个模块. 1.3.1 串口通信模块 串口通信是连接硬件节点和上位机软件的唯一枢纽,用户的定位指令以及硬件上传的测距信息都是通过串口传输到上位机软件中来的。为了方便程序的书写,这里将串口封装称为一个类class CSerialPort;该类能够完成对串口的初始化,打开,读写,事件等待等功能。 MFC的一大特色是消息响应机制,在本类中,为了完成通信,作者定义以下消息: #define WM_COMM_BREAK_DETECTED WM_USER+1 #define WM_COMM_CTS_DETECTED WM_USER+2 #define WM_COMM_DSR_DETECTED WM_USER+3 #define WM_COMM_ERR_DETECTED WM_USER+4 #define WM_COMM_RING_DETECTED WM_USER+5 #define WM_COMM_RLSD_DETECTED WM_USER+6 #define WM_COMM_RXCHAR WM_USER+7 #define WM_COMM_RXFLAG_DETECTED WM_USER+8 #define WM_COMM_TXEMPTY_DETECTED WM_USER+9 然后在类ESAP中使用 afx_msg LONG OnCommunication(WPARAM ch, LPARAM port);获取串口送上来的消息。因为串口是一个一个字符的形式将消息上传上来,故这里响应的是其WPARAM ch,当程序遇到”\r\n”,并且之前接受的数据长度大于10的时候,认为有新的数据包过来,否则丢弃掉。数据包格式如表1-1,其中第一行为包格式,第二行为样例包。各个数据以空格符号分开,以\r\n结尾。 表1-1 主锚节点上传数据包格式 Serial Number Anchor Address Tag Address Distance RSSI 1 71 11 2.36 50 得到完整数据包后将数据包封装成结构体Result_Node,以节点的形式加入处理缓存队列,方便以后数据处理操作,其中结构体定义如下: struct Result_Node{ int serial_number; char dest_addr[3]; char src_addr[3]; float distance; char rssi[3]; }; 为达到对节点的控制的目的,只需在主程序中调用afx_msg LONG OnCommadToSend(WPARAM wparam, LPARAM cmd);为作者设计的一个指令包,包格式如表1-2:其中第一行为包格式,第二行为样例包。 表1-2 指令包格式 Head Cmd Tag Reserved Tail 0x0001 0x0011 0x0011 0x0000 0x1000 因为PC机有太多不安全因素,命令包并没有像数据包那样没有包头包尾,Head和Tail固定为0x0001和0x1000。主锚节点收到数据包后首先对数据包解包,如果格式不正确。就丢弃,以免因为其他操作,导致数据传入主锚节点,使得系统不稳定。 Cmd表示是何种命令,暂时只定义两种命令,测距开始命令和测距停止命令。 RANGING—START 0x0011 RANGING—STOP 0x1100 Tag为要测定的目标节点,它可以为0x0001~0x00ff中任意不同于四个锚节点的地址的数。主锚节点根据这一位来确定用户想要定位的目标。如果Cmd为0x1100,即停止测距指令,则这一位置应该置0x0000; Reserbed为保留位,暂时定为0x0000,这方便以后命令的扩展等功能。 1.3.2 数据处理模块 现在缓存中存放的是一堆Result_Node节点,但是这些数据并没有被处理,不能直接应用于定位算法中。数据处理模块负责把这些数据分类、排错、滤波、还原。为后续的定位计算准备数据。其处理流程如图1-8: 图1-8 数据处理流程图 首先从Buff中读取一个节点,因为硬件已经对数据进行平滑处理,由于刚开始的时候平滑数组所有值都为0,前十个上传的信息都被乘上一个平滑系数。为了还原这些数据,只需判定其serial number位是否小于10,然后进行相应的还原处理。为了区分不同锚节点的距离信息,作者为每个节点分配一个缓存队列,对处理完的距离信息分别加入对应的缓存队列,并将缓存队列状态设置为非空状态。根据第三章分析处理得出的结论,根据不同的情况对进入缓存队列的数据进行相应的处理校正。首先根据新进的数据与上次数据相比较,利用物体在室内运动速度有上限这一前提,制作一个平滑滤波器,滤掉因外界干扰造成的测距误差。然后根据软件的场景设置选择不同的处理方法,软件给出静态目标定位和动态目标定位、视距可达定位和视距不可达定位四种情况,如果定位人员不知道具体场景,可按照默认的选项进行定位。软件会根据RSSI值,测距结果对进入缓存队列的数据进行处理。最后对处理完的数据进行平滑滤波,并将结果保存,以便后续计算模块使用。 上述处理过程被封装进一个class CDataPro 中,并给出接口函数double data_processing(double ranging_distance,double rssi_in,int object, int obstacle),程序中只需调用该函数,就可以完成对数据的处理。 1.3.3定位计算模块 上面数据处理已经完成,当定位模块检测到四个缓存队列的状态都是非空状态,即满足定位计算的基本数据要求,就读取其中的数据进行定位计算。要实现定位就需要将这些距离信息转换为相对于坐标系的坐标信息,这才能给人一个比较直观的感觉。这涉及到三个工作:定位坐标系的建立,目标节点的计算,算法的程序实现; a)坐标系的建立 任何一个定位系统都有自己的参考坐标系,本系统的参考坐标系是根据实际场景生成的相对坐标系。为方便描述,这里约定主锚节点的物理位置为A、其余三个锚节点为B、C、D,如图1-9所示。 A (0,0,0) Y Z 图 1-9 坐标系建立示意图 首先需人工测量出A 、B 、C 、D 四个点离参考平面高度H_A 、H_B 、H_C 、H_D ,如果是采用二维定位,可简单将这四个值赋值为零。然后测出四个点两两之间的距离AB,AC,AD,BC,BD,CD 。总共十个数据; 初始化A,B,C,D 四个点Z 坐标为Za=0,Zb= H_B-H_A, Zc= H_C-H_A,Zd= H_D-H_A 则可设四点坐标为A(0,0,0),B(Xb,0,H_B-H_A),C(Xc,Yc,H_C-H_A),D(Xd,Yd,H_A-H_C); 很容易推出: 22__AB Xb ) (A H B H --= )2/()2(Xc 222Xb Zb Zc BC AB AC ???--+= 2 22c Yc Z Cx AC --= (因为AC 要与Y 轴的正向方向夹角为锐角,所 以这里Yc 取正值。) )2/()2(222Xb Zb Zd BD AB AD Xd ???--+= )2/()22(222Yc Zc Zd Xc Xd CD AC AD Yd ???-??--+= 由此可以定出唯一坐标系。为后续计算提供参考位置。 b)目标节点的计算 目前有很多成熟的定位算法,每种定位算法都有各自的优缺点,因为本系统设计的需要:既支持二维定位,也支持三维定位,故本文有两种定位算法。一种是Chan 算法,另一种是由Chan 算法演变而来的三维定位算法。 二维定位中,选取三个参考点A、B、C,三个点到目标点的距离分别为Ra,Rb,Rc。最好的定位结果图如图4-10。这时可以简单的利用三个二元二次方程组求解出目标点坐标。 图1-10 Chan定位算法示意图 当出现测距误差时,Ra,Rb,Rc会出现不同程度的变大或者缩小。例如三个圆的半径都比实际值小,那么三个圆就没有交点,但是这并不意味着二元二次方程没有解。此时求出的坐标为任意两圆的根轴的交点坐标,如图1-11所示: 图1-11 三个圆没有交点的解 由于本系统有四个锚节点,这就意味着有一个冗余,可以利用这个冗余数据计算目标节点坐标,具体做法为:四个距离信息中任意取出三个来定位, 这样可以计算出4个目标节点。然后取四个目标节点所组成的四边形的质心为最终定位目标节点。 三维定位中,类似于二维定位算法。可以列出一个三元二次方程组: ???????=-+-+=-+-+=-+-+=-+-+22222 22222222222)()(X)-(Xd )()(X)-(Xc )()(X)-(Xb )()(X)-(Xa Rd Z Zd Y Yd Rc Z Zc Y Yc Rb Z Zb Y Yb Ra Z Za Y Ya (1-1) 可得出一个三元一次方程组: ?????+-=+++-=+++-=++2222 222 222Y dY 2XdX 22Y cY 2XcX 22Y bY 2XbX 2AD Rd Ra ZdZ AC Rc Ra ZcZ AB Rb Ra ZbZ (1-2) 求解上述方程组即可得出目标点的三维坐标。 这里为方便编程,采用矩阵方式求解,上三元一次方程组可化为 AB=C,其中A ,X ,C 均为矩阵, ?? ????????=Zd 2Yd 2Xc 2Zc 2Yc 2XC 2Zb 2Yb 2Xb 2A ,????? ?????=Z Y X B ,???? ??????+-+-+-=222222222C AD Rd Ra AC Rc Ra AB Rb Ra , 可以得出B 的最小二乘解为 C A A A T T 1)(B -= (1-3) 同样,假如Ra ,Rb ,Rc ,Rd 因为测量的误差而大于实际值,那么所求的交点为他们根面的交点; c)程序实现 将坐标系封装为一个class Coordinate,内部封装了坐标系的初始化,坐标系的建立,二维坐标计算,三维坐标计算等函数。 Public: Point calculate_2d (Point a, Point b,Point c,DISTANCE n2a, DISTANCE n2b, DISTANCE n2c); Point calculate_2d (DISTANCE n2a, DISTANCE n2b, DISTANCE n2c, DISTANCE n2d); void init(DISTANCE ab,DISTANCE ac,DISTANCE bc,DISTANCE ad,DISTANCE bd,DISTANCE cd,HEIGHT ha,HEIGHT hb,HEIGHT hc,HEIGHT hd); void creatCoordinate(); Point calculate_3d (DISTANCE n2a, DISTANCE n2b, DISTANCE n2c, DISTANCE n2d); DISTANCE P2P (Point a, Point b); 1.4 显示模块的设计 为了能让用户直观看到目标点的位置,本文特意引用三维界面编程理念,采用OPENGL技术错误!未找到引用源。,将用户从枯燥的数字中解脱出来。显示界面如图1-12所示。 首先用OpenGL的基本图形和坐标变换,来构造界面中可能用到的模型,比如旋转的雷达。然后需要在OpenGL场景中建立有一定真实感的天空、地面。地面的高度由读入的等高线地图图片数据决定,就可以生成与等高线相同高度差的"山"。天是由一个长方体(称为天空盒),在它的各个面上贴有表示天的图片形成的。用于天空背景的图片有特殊要求。4个侧面图的边与顶面图的边相连,4侧面图前后相连。图片大小为2的N次方(32、64、128...)。 至此,与现实相对应的虚拟世界已经搭建好了。人们要在里面行走就需要漫游技术,人对世界的综合视觉观察效果,是来源于人的眼睛。眼睛就像一架摄像机,将外部影像反映到大脑。在计算机3D图形处理技术中,也有类似眼睛的东西gluLookAt(…) 观察函数,如果这个观察点在OpenGL场景中的位置发生变化,在计算机屏幕上的图像就发生变化。 在OpenGL中观察虚拟世界的主要函数gluLookAt(…) ,它的主要的作用是可以改变在OpenGL场景的观察点,这个观察点就好像是眼睛,也好像是人们手中的摄像机。人在一个场景中行走时,看到前面的景物越来越近,两边的物体在向后退,这就是观察点在场景中的位置改变的结果。 最后,为了把定位结果直观展示出来,作者将目标抽象为一个红色的球,这样能使人们迅速准确的找到目标,作者提供了两种视角:行走视角和高空俯视视角。上述所有功能被封装在class baiscobj里面,软件截图如图1-12所示; 图1-12 高空俯视视角图 招远市黄金矿业工程有限责任公司矿用人员定位管理系统 目录 一、矿山基本情况 一、矿区概况 二、公司资质证书 见附件: 三、技术文件 第一节、概述 1.1背景和需求 煤矿安全生产事关人民群众的生命和财产安全,各级政府一贯高度重视煤矿安全生产问题,并采取一系列措施不断加强安全生产工作。通过不断的努力,近一时期煤矿安全生产状况总体上趋于稳定好转,但由于基础薄弱等种种原因,煤矿安全生产状况仍然不容乐观。如何改变目前煤矿企业对井下人员落后的管理模式,如何实现管理的现代化、信息化也成为所有煤矿企业关心的问题,因此建立以灾害预防、事故救助、电子信息化管理为主要目标的信息化和智能化建设势在必行。 1.2系统简述 (1)本系统是运用高科技手段开发研制。系统的核心识别设备采用了具有国际先进水平的微波技术,该技术采用了当今最先进的0.18uM的微波芯片技术,使产品的性能和原来的微波技术相比得到了本质的改进,彻底解决了远距离、大流量、超低功耗、高速移动的标识物的识别和数据传输难题,而且成本较以往大大降低,同时也解决了中低频电磁波技术感应距离短、防冲突能力差的致命弱点。 (2)系统能够及时、准确的将井下各个区域人员及设备的动态情况反映到地面计算机系统,使管理人员能够随时掌握井下人员、设备的分布状况和每个矿工的运动轨迹,以便于进行更加合理的调度管理。当事故发生时,救援人员也可根据矿用人员管理系统所提供的数据、图形,迅速 了解有关人员的位置情况,及时采取相应的救援措施,提高应急救援工作的效率。 (3)系统是集井下人员考勤、跟踪定位、井下信息发布、灾后急救、日常管理等一体的综合性运用系统,集合了国内识别技术、传输技术、软件技术等最顶尖的产品和技术,是目前国内技术最先进、运行最稳定、设计最专业化的井下人员定位系统。这一科技成果的实现,将为煤矿企业的安全生产和日常管理上台阶以及事故急救带来了新的契机。 1.3基本原理 1.3.1 系统应用原理说明 系统应由主机、传输接口、本安型读卡分站、识别卡、矿用隔爆兼本质安全型电源箱、电缆、接线盒、避雷器和其他必要设备组成。在井下主要巷道、交叉道口、必经之路等重要位置安装无线读卡分站,下井人员携带识别卡,识别卡能发射信号,当识别卡在接收器一定范围内时,读卡分站接收到识别卡发出的信号,将信号进行分析、处理,并把信号发送到地面,地面信号传输接口把信号进行转换,交给主机进行处理,从而实现目标的自动化管理。 识别卡具有双向通讯功能,当矿工遇到紧急事件时,可以按下紧急求救按钮,地面监控主机就会显示出求救人员的信息(包括在那个位置及人员情况),矿方可以在第一时间组织人员经行抢救及处理。 调度室综合所有安全因素,如果遇到大的问题,需要井下人员进行紧急撤离,可以向井下某人(或某地区人员)(或者全部人员)发出撤离命令,在第一时间保证人的安全。 管理者可以根据大屏幕上或电脑上的分布示意图查看某一区域,计算机即会把这一区域的人员情况统计并显示出来。中心站主机会根据一段时间的人员出入信息整理出这一时期的每个下井人员的各种出勤报表,作为工资发放的依据。同时全方位监控井下人员分布情况。 1.3.2 系统应用原理图 (一)设计原则 鉴于煤矿井下人员管理系统的重要性,我们以科学的方法、严谨的态度,认真对系统仔细的分析,力求达到系统设计的先进性、可靠性、实用性和可扩展性。 长途客运总公司 汽车GPS定位/记录仪 系统建设方案 J T -O M R O N 目录 第一章前言 (1) 第二章系统总体设计 (3) 第三章系统总体设计方案 (11) 第四章监控管理系统设计方案 (14) 第五章系统建设方案 (19) 第一章前言 随着经济的高速发展,车辆已经成为了一种非常重要的交通工具,它已成为了企业业务和私人生活中的一部分。客运行业是各省市地区的重要经济形式,随着交通运输行业之间的竞争不断加剧,带来了诸多的交通和管理问题,因此运输企业采取种种措施来监控和保护车辆日常运作。但在车辆实际的运作中,有时出现车辆被盗、司机来公车干私活、司机未按规定的路线行驶、企业无法高速快效的进行车辆调度等等问题,而过去运输企业对车辆采取的种种措施已经往往只能起到事后补救的作用。因此企业产生了对车辆进行实时监控和管理的需求。如何运用现代化管理手段合理调度、提高车队的使用效率、降低事故的发生,已成为一个迫切需要解决的课题摆到了运输行业各企业的面前。 对于客运企业来说,主要想实现对车辆进行跟踪、调度、管理和对车辆和司机进行安全保障等需要,一般有如下的需求: ●当出现被盗情况时,即时发现和制止盗窃行为。 ●随时了解到自己的车辆所在地点。 ●怎么才能有效的监控车辆在途中的运营情况。 ●怎样控制票款的流失。 ●更有效的监控业务的执行情况。 ●司机是否按公司的规章行车。 ●对车辆的营运历史进行有效管理。 ●更有效的提高车辆的调度。 ●车辆是否在制定的路线和制定的区域行驶。 ●在行车过程中,当出现异常情况时,能随时随地获得帮助。 针对上述问题,我们依靠自身成熟的技术,同时借鉴国外成功的经验,现已在ITS(智能交通系统)领域中率先迈出了坚实的一步,取得了重大进展,公司研发、生产的GPS车载记录仪是一项引进国外最新科技成果、融全球卫星定位系统(GPS)、地理信息系统(GIS)、全球移动通信系统(GSM)以及计算机数据处理技术和现代数据通讯技术于一体的尖端高科技项目,设计成具有卫星定位、数 郑煤集团( 登封) 教学二矿 矿井人员定位系统 设 计 方 案 编制单位: 郑煤集团( 登封) 教学二矿编制时间: 二0一0年十一月 郑煤集团( 登封) 教学二矿 矿井人员定位系统设计方案说明书 生产规模: 45万吨/年 矿长: 李同河 技术负责人: 刘建军 编写: 匡久刘超峰李海军 会审: 李同河刘建军郑勤峰邵吉利王俊营 编写单位: 郑煤集团( 登封) 教学二矿 编写时间: 二0一0年十一月 教学二矿人员定位系统设计方案 根据国家安全监管总局【】146号, 关于《建设完善煤矿井下安全避险”六大系统”的通知》文件要求和河南省、郑煤集团有关文件精神, 完善井下安全避险”六大系统”, 进步一提高我矿 安全生产保障能力, 结合我矿实际, 特编制人员定位系统设计方案: 一、煤矿人员监控工程设计编制依据 1、 AQ6201——《煤矿安全监控系统通用技术要求》 AQ6210——《煤矿井下作业人员位置监测与管理系统通用技术条件》 2、 AQ1018 ---- 《煤矿井下作业人员管理系统使用与管理规范》 3、《煤矿安全规程》 4、国家安全监管总局国家煤矿安监局关于《建设完善煤矿井下安全避险”六大系统”的通知》( 安监总煤装【】146号) 5、《教学二矿井下安全避险”六大系统”实施方案》 二、组织领导机构 成立人员定位系统管理领导组: 组长: 李同河 副组长: 刘建军、郑勤峰 成员: 邵吉利、王俊营、匡久、孙坤东、王克勋、徐少歌、卢付臣 办公室设在综合调度室, 综合调度室主任负责做好人员定位系统专项设计等日常工作。 三、人员管理系统组成 人员管理系统主要由监控计算机、系统软件、人员定位分站、 目录 第一章GPS简介及基本理论 (2) 1.1 GPS的概述 (2) 1.2 GPS的组成 (3) 1.3 GPS的发展趋势 (3) 1.4 Globalsat和HOLUX的EB-3531 (4) 1.5 EB-3531的特点 (5) 第二章硬件电路设计 (7) 2.1 电源转换电路设计 (7) 2.2 GPS接收模块与单片机接口电路设计 (9) 2.3 单片机控制系统的硬件电路 (9) 第三章软件部分设计 (11) 3.1 串口通行模块 (11) 3.2主程序设计 (13) 第四章调试 (15) 4.1 硬件调试 (15) 4.2 软件调试 (15) 第五章总结 (17) 致谢 (18) 参考文献 (19) 第一章 GPS简介及基本理论 1.1 GPS的概述 GPS是英文Navigation Satellitte Timing and Ranging/Global Positioning System的字头缩写词(NAVSTAR/GPS)的简称。它的含义是,利用卫星的测时和测距进行导航,以构成全球卫星定位系统。现在国际上已经公认:将这一全球定位系统简称:GPS。 GPS系统的前身为美军研制的一种“子午仪”导航卫星系统(Transit),1958年研制,64年正式投入使用。该系统用5到6颗卫星组成的星网工作,每天最多绕过地球13次,并且无法给出高度信息,在定位精度方面也不尽如人意。然而,子午仪系统使得研发部门对卫星定位取得了初步的经验,并验证了由卫星系统进行定位的可行性,为GPS系统的研制埋下了铺垫。由于卫星定位显示出在导航方面的巨大优越性及子午仪系统存在对潜艇和舰船导航方面的巨大缺陷。美国海陆空三军及民用部门都感到迫切需要一种新的卫星导航系统。为此,美国海军研究实验室(NRL)提出了名为Tinmation的用12到18颗卫星组成10000km高度的全球定位网计划,并于67年、69年和74年各发射了一颗试验卫星,在这些卫星上初步试验了原子钟计时系统,这是GPS系统精确定位的基础。而美国空军则提出了621-B的以每星群4到5颗卫星组成3至4个星群的计划,这些卫星中除1颗采用同步轨道外其余的都使用周期为24h的倾斜轨道该计划以伪随机码(PRN)为基础传播卫星测距信号,其强大的功能,当信号密度低于环境噪声的1%时也能将其检测出来。伪随机码的成功运用是GPS系统得以取得成功的一个重要基础。海军的计划主要用于为舰船提供低动态的2维定位,空军的计划能供提供高动态服务,然而系统过于复杂。由于同时研制两个系统会造成巨大的费用而且这里两个计划都是为了提供全球定位而设计的,所以1973年美国国防部将2者合二为一,并由国防部牵头的卫星导航定位联合计划局(JPO)领导,还将办事机构设立在洛杉矶的空军航天处。该机构成员众多,包括美国陆军、海军、海军陆战队、交通部、国防制图局、北约和澳大利亚的代表。 基于Wi-Fi实时定位技术 矿山人员资产定位应用方案说明 目录 1引言 (3) 1.1文档说明 (3) 1.2术语与缩写解释 (3) 2项目需求 (4) 2.1项目背景 (4) 2.2需求分析 (4) 2.3方案优势 (4) 3方案设计 (5) 3.1设计理念 (5) 3.2功能描述 (6) 3.2.1定位监控 (6) 3.2.2标签管理 (7) 3.2.3报警管理 (7) 3.2.4系统管理 (8) 3.2.5扩展功能 (8) 3.2.6统计报表 (8) 3.3定位网络设计 (9) 4井下Wi-Fi无线定位监控通讯系统 (11) 4.1井下矿工定位考勤系统 (12) 4.2井下电机车定位管理 (12) 4.3Wi-Fi无线语音数据通信系统及Wi-Fi手机定位系统 (13) 4.3.1Wi-Fi网络–数据传输、语音通信、无线视频 (13) 4.3.2无线语音功能模块 (14) 4.3.3手机实时定位主要功能 (15) 5方案实施 (17) 5.1网络部署设计 (17) 5.2网络安装 (17) 5.3实施计划 (17) 5.3.1实施说明 (17) 5.3.2施工进度安排 (17) 1引言 1.1 文档说明 本文档为基于Wi-Fi的实时定位解决方案。 1.2 术语与缩写解释 2项目需求 2.1 项目背景 矿井的分布是分层结构的,井下面积很大,井下人员较多,为了保证井下人员的安全,防患于未然,监控矿车运作,我们将采用基于Wi-Fi的无线局域网实时定位系统对井下的矿工和矿车进行跟踪定位,随时了解每个矿工、矿车的当前位置。同时需要实现对每个矿工上下勤的监控功能和矿车矿石运输监管统计工作。基于Wi-Fi的无线局域网,需要实行语音通信、视频传输、环境信息采集等功能。 2.2 需求分析 1、人员、车辆的实时精确定位系统:通过井下电子地图,实时显示人员和车辆位置,记录移动轨迹。 2、人员考勤系统:每日自动统计人员进出矿井的次数和时间,能识别其他未经允许的人员擅自入内,并且报警。 3、Wi-Fi无线井下环境参数实时监控传感系统:通过Wi-Fi模块连接各类传感器,可以采集井下温度、湿度等环境参数,并且无线传输。 4、无线车辆识别监控系统及采矿量监控系统:车辆上安装的定位标签,电机车在井下定位区域可随时查询每台车所在位置、运行区间。系统根据判断出的矿车载体,自动跟踪矿车的运行轨迹,在监控轨迹与事先设定路线不符和时报警。 5、Wi-Fi无线语音通信系统:企业员工使用WLAN/GSM双模手机可在WLAN覆盖区包括井下优先通过Wi-Fi网络实现内部通话,参加电话会议,也可拨打PSTN外线电话,代替座机和手机的功能;离开WLAN覆盖区采用GSM拨打电话。不但可节省通话费用,而且可以通过无线网络和Wi-Fi手机开展定位、视频电话、会议电话等多种增值业务。 6、Wi-Fi无线视频监控系统:带有Wi-Fi的无线视频摄像头可以按装在移动的车辆上或者由矿工携带,实时无线传输视频图像。 2.3 方案优势 ?网络覆盖范围广,容易覆盖整个区域,设备可集中管理,维护成本低; ?可定位带有Wi-Fi模块的手机、PDA等其他Wi-Fi终端; ?Wi-Fi在室内外都工作; ?Wi-Fi支持上网,可以通过Wi-Fi网络上传数据; ?定位精度高 ?本地化服务,软硬件可订制。 井下人员定位系统用户手册 深圳市哲扬科技有限公司 2012-09-05 前言 系统简介 本系统是以监控与定位一体化为主要特点的管理系统,以此提高矿山安全管理水平,加快矿山生产工作现代化进程,在保障矿山安全生产中发挥着重要作用。 矿用人员定位系统是深圳哲扬科技有限公司为矿井、矿山隧道等场所的人员和移动设备进行实时定位、跟踪监控和考勤管理开发的完整解决方案。本系统能及时、准确将井下各个区域的人员及设备的动态情况反映到地面计算机,以便于进行更加合理的调度管理。 矿用人员定位系统可对矿井入井人员/设备进行实时定位、跟踪监测,随时清楚掌握每个人员/设备在井下的位置及活动轨迹。如果发生灾变,还可以立即从监控计算机上查询事故现场的人员具体位置分布情况、被困人员数量和他们的姓名。利用系统的日常考勤管理功能,能对下井人员进行考勤管理。 《使用手册》简介: 本手册分为二大部分 第一篇系统概述 系统概述介绍《井下人员定位系统》的结构,工作原理。 第二篇系统功能 系统功能篇指导不同角色权限的用户使用不同的功能,对每一项功能操作的具体过程、步骤进行描述,它旨在描述操作的功能及流程,是本手册的核心部分。 目录 前言.................................................................................................................................................II 第一篇系统概述 (4) 第一章系统架构 (4) 第二篇人员定位系统功能 (5) 第一章界面概述 (5) 第一节登录................. . (5) 第二节主界面 (6) 第二章实时查询............................................................................................................... ..6 第一节实时人员定位............................................................................................... (6) 第二节实时车辆定位................................................................................................. ..10 第三节设备监控 (12) 第四节区域信息 (13) 第三章历史查询 (14) 第一节人员历史查询 (14) 第二节车辆历史查询............................. .. (18) 第四章报警查询..................................................... (22) 第一节人员报警查询 (22) 第二节基站报警查询........................................................... . (23) 第三节区域报警查询 (24) 第五章查询统计 (25) 第一节人员考勤报表 (25) 第二节车辆考勤报表 (26) 第三节基站报警统计 (27) 第六章信息管理 (30) 第一节矿区管理 (30) 第二节人员管理 (34) 第三节车辆管理 (36) 第四节系统配置 (37) 第七章系统管理 (37) 郑煤集团(登封)教学二矿矿井人员定位系统 设 计 方 案 编制单位:郑煤集团(登封)教学二矿 编制时间:二0一0年十一月 郑煤集团(登封)教学二矿矿井人员定位系统设计方案说明书 生产规模:45万吨/年 矿长:李同河 技术负责人:刘建军 编写:匡久刘超峰李海军 会审:李同河刘建军郑勤峰邵吉利王俊营 编写单位:郑煤集团(登封)教学二矿 编写时间:二0一0年十一月 教学二矿人员定位系统设计方案 根据国家安全监管总局【2010】146号,关于《建设完善煤矿井下安全避险“六大系统”的通知》文件要求和河南省、郑煤集团有关文件精神,完善井下安全避险“六大系统”,进步一提高我矿安全生产保障能力,结合我矿实际,特编制人员定位系统设计方案: 一、煤矿人员监控工程设计编制依据 1、AQ6201——2006《煤矿安全监控系统通用技术要求》 AQ6210——2007《煤矿井下作业人员位置监测与管理系统通用技术条件》 2、AQ1018 ----2007《煤矿井下作业人员管理系统使用与管理规范》 3、《煤矿安全规程》2010年版 4、国家安全监管总局国家煤矿安监局关于《建设完善煤矿井下安全避险“六大系统”的通知》(安监总煤装【2010】146号) 5、《教学二矿井下安全避险“六大系统”实施方案》 二、组织领导机构 成立人员定位系统管理领导组: 组长:李同河 副组长:刘建军、郑勤峰 成员:邵吉利、王俊营、匡久、孙坤东、王克勋、徐少歌、卢付臣 办公室设在综合调度室,综合调度室主任负责做好人员定位系统专项设计等日常工作。 三、人员管理系统组成 人员管理系统主要由监控计算机、系统软件、人员定位分站、人 文献综述 电子信息工程 基于单片机的GPS定位系统设计综述 摘要:本文简要描述了GPS定位系统的应用现状和未来的一个发展趋势以及GPS接收器的一些结构特征。设计了几种基于单片机的GPS的方案,其中考虑到不同方案所具备的各自优势,例如功耗﹑性能﹑价格等等。具体选择哪种方案需要更进一步的斟酌。 关键词:GPS;单片机;功耗 引言 全球定位系统(GPS)是20世纪70年代由美国开始研制,于1994年全面建成,以接收导航卫星信号为基础的非自主式导航与定位系统[1]。随着社会的发展和科学技术的进步,使得我们判别方向和确定距离的能力有了划时代的进步。全球卫星定位系统GPS便是近年以来开打的最具有开创意义的高新技术之一,其全球性﹑全能性﹑全天候性的导航定位﹑定时﹑测速优势必然会在诸多领域中得到越来越广泛的应用[2]。经过20多年的研究实践,现在GPS定位的应用已是多种多样。不仅在航天﹑军事﹑科研领域需要涉及到GPS定位,在日常生活中人们也越来越多的感受到GPS定位的重要性。一、GPS的应用现状 GPS业界流行这样一句话,“GPS的应用只受到人们想象力的限制”。目前GPS的民用领域已经包括了陆地运输、海洋运输、民用航空、通信、测绘、建筑、采矿、农业、电力系统、医疗应用、科研、家电、娱乐等多个领域,而大家所熟知的汽车导航也只不过是其中的应用之一。日本的GPS系统车载使用率高达59%,欧美约为25%。中国汽车的GPS系统车载率不到2%。用户迫切的需求造成了巨大的市场空洞,时刻寻找着利润增长点的各大IT厂商也蜂拥而至,或彻底转型或拓展业务,开始抢占这个巨大的蛋糕。不但如此,GPS产业的迅猛发展还同时影响了其他并行产业链的发展,并使其交叠融汇,这也使得大量带有GPS功能的PDA、MP4、相机、手机等手持终端设备成为现今市场上的一大主流[3]。 二、GPS的未来前景 由于GPS技术所具有的全天候、高精度和自动测量的特点,作为先进的测量手段和新的生产力,已经融入了国民经济建设、国防建设和社会发展的各个应用领域。随着冷战结束和全球经济的蓬勃发展,美国政府宣布2000年至2006年期间,在保证美国国家安全不受威胁的前提下,取消SA政策,GPS民用信号精度在全球范围内得到改善,利用C/A码进行单点定位的精度由100米提高到20米,这将进一步推动GPS技术的应用,提高生产力、作业效率、科学水平 卫星定位与导航系统 设计说明书 一、测区概况与任务的提出 1、任务来源 为了维护土地的社会主义公有制,保护土地使用者的合法权益,加强土地管理,建立健全地籍管理制度,使土地管理向规范化、科学化迈进,满足飞速发展的社会主义市场经济的需要,受灌云县国土管理局委托,由淮海工学院空间信息科学系实测伊山镇城区和全县25个乡镇约1000平方公里、100个点的GPS基础控制网,以满足城区和全县各乡镇地籍调查工作的需要。 2、测区概况 灌云县地处苏北平原,属连云港市管辖,处于连云港市南部,灌南县北部。测区内有宁连高速公路、204国道贯通,交通十分便利,测区内地势平坦,大伊山最高海拔227米,东南部最低2.6米,平均海拔高程约3.7米。测区属季风特点的海洋性气候,四季分明,寒暑适宜,光照充足,雨量适中。气候温和湿润,常年平均气温14度左右,年平均降水量约910-980毫米之间,降雨期集中在7-9三个月。测区包括灌云县全乡镇政府所在地,测区为从西至东直线距离约60公里的带形区域。 其地理坐标: 东经 119゜08′~ 119゜29′ 北纬 34゜ 34′~ 34゜ 46′ 测区现有的平面控制网系国家测绘局于1954年完成国家一、二等三角网。坐标系统采用新54系坐标系。一、二等三角点多个,根据实际情况和本设计书的要求采用了三个一等三角点和一个二等点。测区现有高程控制网系统由国家测绘局完成的二、三等水准网(56黄海高程系和85基准面高程)。利用原三等水准点4个。该控制网工程实施计划从2004年6月开始收集资料、踏勘找点,2004年7月开始选定点位、埋设标石,进入全面施工,2004年8月开始外业观测。2004年3季度进行内业平差计算,整理资料, 2004年12月底检查完毕提请验收。 若利用常规测量技术进行这项工作,一方面是施工周期太长,少则3年,多则好几年;另一方面,平面控制点间要求通视,这就需要建造高标,无疑需要耗费大量的经费。水准观测虽然具有较高的精度,但野外观测劳动强度大,观测周期长,费用高。 而卫星全球定位系统(GPS)具有定位精度高、全天候、高效率、经费省等优点,用于建立平面和高程控制网,是当代最先进的技术手段。采用双频和单频GPS接收机观测距离可以从数米--数百公里,精度可达5+1×10-6·D毫米,完全可以用于建立灌云县控制网。用常规测量技术花费时间较长,而用GPS定位技术在短时间内即可完成。经费则为常规测量的1/5。 定位系统的设计与实现 本文实现的定位系统针对室外环境及办公室环境的实现的定位应用,通过对场景中人员、物品进行定位,方便用户对目标的实时监测和管理。 上位机开发环境为MFC (Microsoft Foundation Classes),它是一个微软公司提 供的类库,以C++类的形式封装了Windows API ,并且包含一个应用程序框架,以减少应用程序开发人员的工作量。其中包含的类包含大量Windows 句柄封装类和很多Windows 的内建控件和组件的封装类。它的详细介绍在这里就不赘述了。下面对本定位系统的具体实现过程进行比较详细的描述。 1.1 定位系统结构 定位系统拓扑结构图如图1-1所示。其实际场景应用可以参考图1-2。 Anchor 图1-1 定位系统拓扑结构图 ANCHOR 串口代理 传输测距结果 图1-2 实际应用场景图 本拓扑中有三种功能不同类型的节点:主锚节点、从锚节点、目的节点。其 中主锚节点和从锚节点是一类已知自身位置坐标信息的固定节点,它们的任务是获取包含距离信息以及信号强度值的数据包。目的节点是可以自由移动的节点,可以在一定范围内自由移动,定位系统的最终目的就是获取该类节点位置的坐标信息;从锚节点负责发起测距请求,将测距信息发往目的节点,得到从锚节点与目的节点的距离信息以及信号强度信息,并将该信息发往主锚节点。主锚节点在整个系统中起着至关重要的作用,首先它要响应上位机发出的命令,确定要定位的目标,并发出指令,命令从锚节点对目标节点进行测距;其次主锚节点不仅要获取自身与目标节点的距离信息以及信号强度信息,还需要协调控制三个从锚节点,接受从锚节点发回的测距信息;最后主锚节点负责并将这些信息送还给上位机软件处理。目的节点实时监测是否有定位请求并配合锚节点测出响应的距离信息以及信号强度信息; 本定位系统主要包括四大块:硬件节点、硬件节点软件、上位机监测软件以及显示模块。每一部分设计都有其特殊性,硬件节点为系统提供了定位所需的硬件平台,是信息采集的基础,第三章已经详细介绍其性能,这里不再赘述。硬件节点软件主要完成了节点间的链路建立和数据采集与传输。上位机软件首先通过有线方式(使用串口)接收由定位硬件节点采集到的相关信息,然后对所采集的定位信息进行处理,最后选用合适的定位算法,计算出目标节点在该参考系的坐标。显示模块负责动态显示节点定位效果,免去人工思考数字坐标所代表的具体意义,是定位软件人性化设计的一个体现。图1-3为系统整体程序流程图; 图1-3系统整体程序流程图 下面分别详细介绍余下的三个模块。 工厂人员定位系统 方案建议书 摘要 当前大型工厂制造企业,人员管理除考勤管理外主要依靠监管人员进行现场管理的方式,这种方式不但需要监管人员亲临现场,而且并不能从根本上解决人员管理问题,比如车间分布较分散,监管人员需要不断巡视各车间;人员较多时,并不能对每个人员起到监管作用。随着企业规模扩大,人员的增多,随之而来的是如何提高监管人员的工作效率,管理好每个人员,对企业管理来说至关重要。 针对工厂人员管理的难题,结合了ZigBee无线技术,开发出工厂人员定位系统,可以从根本上解决工厂人员管理的问题。系统不但解决了监管人员要到现场进行巡查的麻烦,并且能够解决对每个人的实时监管。监管人员只要坐在电脑旁,即可实现实时监控。系统不仅节省大量人力,而且极大的提高了工作效率。工厂人员定位系统还可以扩展工厂人员考勤系统,实现人员从上班打卡考勤到下班打卡考勤整个过程中的实时监控、历史信息查看,从而让管理者能够对人员在工作期间的活动情况一幕了然,当出现紧急情况时可立刻定位到人员,进行及时处理。 工厂人员定位系统是基于SQL大型数据库,在充分理解工厂人员管理的需求后,结合ZigBee技术,将原来的人员亲临现场管理变成智能化的系统监控管理。可解决人员管理难、工作效率低、无法实时监管到每个人、是否按时到岗、危险无法及时处理等问题,在很大程度上提高了企业的人员管理工作效率。 目录 1. 项目背景及意义 (1) 2. 需求分析 (2) 2.1. 人员定位系统的用户需求 (2) 2.2. 人员定位系统的功能性需求 (3) 2.3. 人员定位系统的非功能性需求 (4) 3. 系统总体设计 (5) 3.1. 系统示意图 (5) 3.2. 系统架构 (5) 3.3. 系统设计要点 (6) 4. 系统设计与实现 (6) 4.1. 系统主要功能 (6) 4.2. 系统特点 (13) 5. 系统设计方案 (14) 5.1. 设计原理 (14) 5.2. 定位原理 (14) 5.3. 设备布置规则 (15) 5.4. 路面定位示意图 (17) 5.5. 车间定位示意图 (17) 6. 系统技术规格 (18) 7. 系统组成 (20) 7.1. 系统拓补图 (20) 7.2. 主要设备 (20) 7.3. 系统软件 (31) kJ128矿用人员监测系统 设 计 方 案 设计: 审核: 批准: 2013年7月4日 前言 χχχ矿位于χχχ,设计年生产能力为100万吨,采用χχχ井开采,矿井工业广场面积χχχ亩,因矿井生产需要,现建立KJ128矿用人员监测系统。 根据根据煤炭行业标准GB3836-2000和新版《煤矿安全规程》规定,结合χχχ矿的实际情况和具体需求,本着先进性、经济性、可靠性和可拓展性的原则,制定本方案。 目录 第一部分产品概述................................................................... 错误!未定义书签。 一、公司及产品介绍............................................................. 错误!未定义书签。 二、系统功能介绍 (4) 2.1系统功能框图 (4) 2.2 特点及功能 (5) 2.3 主要电气性能 (6) 三KJ73型矿用无线接收分站 (6) 3.1 用途 (7) 3.2 工作原理 (7) 3.3 分站结构 (7) 3.4 使用方法 (8) 四 KGE32矿用发码器 (8) 4.1 用途 (8) 4.2 组成及工作原理 (9) 4.3 主要特点及功能 (9) 4.4 主要电气性能 (9) 4.5 环境条件 (9) 4.6 结构 (10) 4.7 使用方法和注意事项 (10) 五系统管理软件 (10) 5.1信息管理 (11) 5.2考勤管理 (12) 5.3系统设置 (18) 第二部分工程设计方案 (20) 一 kj128矿用人员监测系统综合设计说明 (20) 1.1χχχ现状 (20) 1.2. 系统设置 (20) 二具体案例讲析 (21) 第三部分附录.......................................................................... 错误!未定义书签。 表1:三恒产品的使用业绩.................................................. 错误!未定义书签。 人员精确定位系统方案 第一章引言 自十一五以来,我国加大了基础设施建设力度,中国交通建设事业进入了快速发展轨道。尤其在高速公路、铁路、城市轨道方面的建设突飞猛进。在公路、铁路建设方面,道路建设路线逐渐由平原、微丘向山区高原挺进,隧道、桥梁等结构物占线路的比重越来越大,隧道建设工程数量持续增长;在城市轨道建设方面,地铁具有节省土地、减少噪音、减少污染、节省资源等优点,成为各城市解决拥堵、提升城市交通运输能力的重要手段。由于隧道及城市地铁建设的造价高、运营管理相对复杂、施工环境恶劣、事故发生频率较高,常要求对隧道中人员数量进行统计、对施工现场环境进行监控。 目前市场上隧道安全监控系统中都没有与外界直接通话的无线通信系统,在遇到突发事故,如崩塌、涌水涌泥等事故,不能及时向隧道监控室汇报,很容易贻误抢险时机。如果有无线通信系统,施工人员在隧道中工作,可随时将隧道的掘进和安全情况汇报到隧道监控室,便于调度和及时处理突发事故。 当遇到隧道突发事故,对隧道施工人员的抢救缺乏可靠的位置信息,也缺乏语音通信手段,抢险救灾、安全救护的效率仍然不高,效果不理想。由于通信网络不畅,通信手段单一,网络承受能力差,往往造成领导层信息不畅通,指挥不足,数字不准,不利于事故的抢险,极易造成事故损失的扩大。隧道对利用相应的人员跟踪定位设备,全天候对施工人员进行实时自动跟踪和考勤,随时掌握每个员工在隧道的位置及活动轨迹、全隧道人员的位置分布情况等需求迫切。 苏州任辉物联科技有限公司是一家集研发、生产、销售、服务为一体的新型高科技企业,公司多年来专业致力于提供通道闸系统,门禁系统的开发、整合与应用。凭借多年的经验积累和不断的技术创新,我们有能力为客户提供合理的智能化考勤、门禁、消费、工地门禁通道系统解决方案,建设一流的系统工程,以优质的售后服务和严格的培训机制保证系统长期、连续、稳定 厂区人员定位系统解决方案 软件技术有限公司 2015-6 目录 1.项目背景及意义 (2) 1.1系统背景 (2) 1.2项目意义 (2) 2.系统介绍 (3) 2.1系统简介 (3) 2.2系统特点 (3) 3.系统介绍 (4) 3.1系统概述 (4) 3.2功能实现 (5) 3.2.1职工权限设定 (5) 3.2.2全程区域定位 (6) 3.2.3记录考勤 (7) 4.产品配置 (7) 4.1测温腕带电子标签 (7) 综合版防水读写器 (8) 4.3定向分析仪 (10) 4.4数据采集器 (11) 5结束语 (12) 1.项目背景及意义 1.1系统背景 工厂由于人员较多,管理方面存在一定难度,很容易产生管理漏洞,引发不必要的管理难题;此外,工厂本身也是易燃易爆地带,很容易发生危险,造成不可挽回的损失和后果;加之工厂规模较大,如果由于人员管理涣散导致问题的发生,也无从追究责任,使肇事者存在侥幸心理,不加注意,导致问题更加严重,工厂制度将难以得到完善。 1.2项目意义 我们从化工厂存在的实际人员管理问题角度出发,研发出RFID 工厂人员管理定位系统,此系统重点解决了工厂全体员工的管理问题,实现简单的人员区域定位,为管理人员带来便捷,同时可以解决工厂的众多管理问题,对工厂工人进行严格管理,减少意外发生,保障工人的安全,避免因意外给工厂带来的经济损失,提高工厂的名誉,为工厂带来更大的效益。 2.1系统简介 本系统是运用无线传感网络和RFID射频识别技术,通过安装RFID硬件和对应的功能软件,针对工厂人员管理的实际情况,开发的一套完整高效的智能化管理系统。 2.2系统特点 (1)RFID设备技术先进 RFID电子腕带技术可以透过外部材料读取数据;使用寿命长,能在恶劣环境下工作;读取距离更远;可以写入及存取数据,写入时间快;腕带的内容可以动态改变;能够同时处理多个标签;腕带的数据存取有密码保护,安全性更高;可以对腕带附着物体进行追踪定位。 (2)本系统具备较高的成熟度 具有低成本.低功耗.稳定性和保密性特点,可独立运行,不依赖于其他系统。充分考虑网络.主机.操作系统.数据库等的可靠性和安全性设计。 (3)良好的兼容和可扩展性 采用先进的计算机应用技术,具有良好的可扩充性。开放的体系结构和长远的生命周期,能满足以后开发新功能需要;系统通过GPRS 或者串口得来的数据,能和系统实现无缝隙连接。 南京长途客运总公司 汽车GPS定位/记录仪 系统建设方案 J T -O M R O N 目录 第一章前言 (1) 第二章系统总体设计 (3) 第三章系统总体设计方案 (11) 第四章监控管理系统设计方案 (14) 第五章系统建设方案 (19) 第一章前言 随着经济的高速发展,车辆已经成为了一种非常重要的交通工具,它已成为了企业业务和私人生活中的一部分。客运行业是各省市地区的重要经济形式,随着交通运输行业之间的竞争不断加剧,带来了诸多的交通和管理问题,因此运输企业采取种种措施来监控和保护车辆日常运作。但在车辆实际的运作中,有时出现车辆被盗、司机来公车干私活、司机未按规定的路线行驶、企业无法高速快效的进行车辆调度等等问题,而过去运输企业对车辆采取的种种措施已经往往只能起到事后补救的作用。因此企业产生了对车辆进行实时监控和管理的需求。如何运用现代化管理手段合理调度、提高车队的使用效率、降低事故的发生,已成为一个迫切需要解决的课题摆到了运输行业各企业的面前。 对于客运企业来说,主要想实现对车辆进行跟踪、调度、管理和对车辆和司机进行安全保障等需要,一般有如下的需求: ●当出现被盗情况时,即时发现和制止盗窃行为。 ●随时了解到自己的车辆所在地点。 ●怎么才能有效的监控车辆在途中的运营情况。 ●怎样控制票款的流失。 ●更有效的监控业务的执行情况。 ●司机是否按公司的规章行车。 ●对车辆的营运历史进行有效管理。 ●更有效的提高车辆的调度。 ●车辆是否在制定的路线和制定的区域行驶。 ●在行车过程中,当出现异常情况时,能随时随地获得帮助。 针对上述问题,我们依靠自身成熟的技术,同时借鉴国内外成功的经验,现已在ITS(智能交通系统)领域中率先迈出了坚实的一步,取得了重大进展,公司研发、生产的GPS车载记录仪是一项引进国外最新科技成果、融全球卫星定位系统(GPS)、地理信息系统(GIS)、全球移动通信系统(GSM)以及计算机数据处理技术和现代数据通讯技术于一体的尖端高科技项目,设计成具有卫星定位、数字通讯、调度管理、防劫防盗、报警等多功能的高科技综合信息管理系统,为 基于Wi-Fi实时定位技术 厂区人员车辆出入定位管理系统解决方案 江苏开拓信息与系统有限公司 2013年5月 目录 1引言 (3) 1.1文档说明 (3) 1.2术语与缩写解释 (3) 2项目需求 (4) 2.1项目背景 (4) 2.2需求分析 (4) 2.3方案优势 (4) 3方案设计 (5) 3.1设计理念 (5) 3.2功能描述 (6) 3.2.1定位监控 (6) 3.2.2标签管理 (7) 3.2.3报警管理 (7) 3.2.4系统管理 (8) 3.2.5扩展功能 (8) 3.2.6统计报表 (8) 4厂区内Wi-Fi无线定位监控通讯系统 (9) 4.1厂区人员定位考勤系统 (9) 4.2厂区车辆定位管理 (10) 4.3Wi-Fi无线语音数据通信系统及Wi-Fi手机定位系统 ......................................... 错误!未定义书签。 4.3.1Wi-Fi网络–数据传输、语音通信、无线视频............................................. 错误!未定义书签。 4.3.2无线语音功能模块............................................................................................. 错误!未定义书签。 4.3.3手机实时定位主要功能 ..................................................................................... 错误!未定义书签。5方案实施............................................................................................................................. 错误!未定义书签。 5.1网络部署设计........................................................................................................... 错误!未定义书签。 5.2网络安装................................................................................................................... 错误!未定义书签。 5.3实施计划................................................................................................................... 错误!未定义书签。 5.3.1实施说明............................................................................................................. 错误!未定义书签。 5.3.2施工进度安排..................................................................................................... 错误!未定义书签。 第一章绪论 1.1概述 1.1.1研究现状 在地质勘探或是油田勘探的过程中,常会用到地震勘探。爆炸震源是地震勘探中广泛采用的非人工震源。虽然目前已发展了重锤、连续震动源、气动震源等一系列地面震源,但陆地地震勘探经常采用的重要震源仍为炸药。 炸药安放的过程中需要测量起爆电缆的长度,准确的测定线路的长度是勘探顺利进行的前提和保证。但是由于炸药安放在地面下的竖井中,难以直接测量线缆的长度。目前勘测中常使用的方法是利用电阻表测量电缆的电阻值,再通过换算得出导线的长度。测量过程中需要人工对测量结果进行换算和记录,不仅增加了勘探的工作量,在换算和记录过程中还容易产生错误。 在地址勘测中,勘测地点往往都在野外,缺乏固定的标记物和指示。尤其在密林和荒漠等环境中,必须借助仪器来定位。目前最常用定位仪器通常都要使用到GPS。 GPS是Global Positioning System(全球定位系统)的缩写,是美国从本世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。该系统的建立从根本上解决了人类在陆地、海洋、航空、航天等各个方面的导航和定位问题, 具有很高的实用价值。在电力系统通信和电力系统自动化等领域也有广泛的应用。 当初,设计GPS系统的主要目的是用于导航,收集情报等军事目的。但是,后来的应用开发表明,GPS系统不仅能够达到上述目的,而且用GPS卫星发来的导航定位信号能够进行厘米级甚至毫米级精度的静态相对定位,米级至亚米级精度的动态定位,亚米级至厘米级精度的速度测量和毫微秒级精度的时间测量。因此,GPS系统展现了极其广泛的用途。 用GPS信号可以进行海、空和陆地的导航,导弹的制导,大地测量和工程测量的精密定位,时间的传递和速度的测量等。对于测绘领域,GPS卫星定位技术已经用于建立高精度的全国性的大地测量控制网,测定全球性的地球动态参数;用于建立陆地海洋大地测量基准,进行高精度的海岛陆地联测以及海洋测绘;人员定位系统技术方案
汽车GPS定位系统设计方案
煤矿人员定位系统设计方案样本
课程设计:基于单片机的GPS全球卫星定位系统设计说明书
矿山人员实时定位系统解决方案
人员定位系统使用说明手册
煤矿人员定位系统规划设计
基于单片机的GPS定位系统设计综述【文献综述】
卫星定位与导航系统设计说明书
定位系统的设计与实现知识分享
工厂人员定位系统项目解决方案
人员定位系统管理的设计方案
(完整版)精确定位系统解决方案设计
厂区人员定位系统解决方案(移动)(DOC)
汽车GPS定位系统设计方案
厂区人员车辆出入定位管理系统解决方案0812
基于STM32的测量定位系统设计说明
相关主题
文本预览