单片机按键消抖技术及其扩展应用
杨 伟
(浙江诸暨技师学院 312000)
摘要:由于机械触点的弹性作用,按键开关存在一个抖动的特性,如果不作处理这个抖动会给系统带来一些不稳定的因素,甚
至是错误的结果,为了不产生这种现象就必须采取相应的消抖措施。本文就消抖技术作相关介绍,并举一实例作为消抖技术扩
展应用的说明。
关键词:按键抖动;消抖;单片机;扩展应用
The technique of single chip microcomputer and its extension
application
Yang We
(Zhuji Zhejiang Technician College,312000)
Abstract:Due to the flexibility of the role of mechanical contact,button switch are the characteristics of
a jitter,if not treated the jitter will bring some unstable factors system,even wrong results,in order not
to cause this phenomenon must take corresponding jitter elimination measures.In this paper,the elimination
of shaking technology for the relevant introduction,both as an example of an example of the application of
the technology to eliminate chattering.
Keywords:key jitter;jitter;single chip microcomputer;extended application
在使用单片机搭建有人机交互的系统时需要用到键盘,通常
的按键所用开关为机械弹性开关,当机械触点断开、闭合时,电
压信号切换。系统对键盘的输入(逻辑0或1)进行准确采样,避
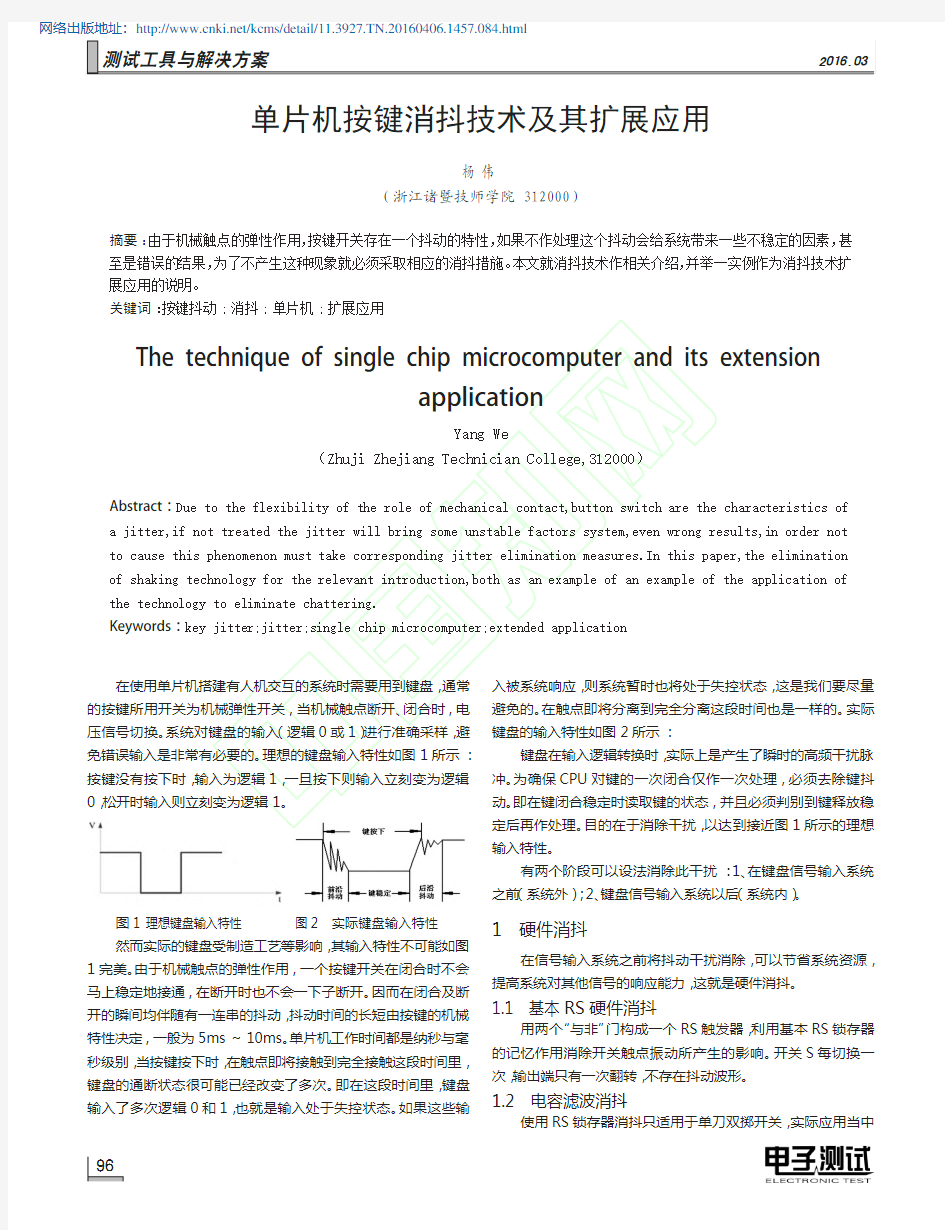
免错误输入是非常有必要的。理想的键盘输入特性如图1所示:
按键没有按下时,输入为逻辑1,一旦按下则输入立刻变为逻辑
0,松开时输入则立刻变为逻辑1。
图1 理想键盘输入特性 图2 实际键盘输入特性
然而实际的键盘受制造工艺等影响,其输入特性不可能如图
1完美。由于机械触点的弹性作用,一个按键开关在闭合时不会
马上稳定地接通,在断开时也不会一下子断开。因而在闭合及断
开的瞬间均伴随有一连串的抖动,抖动时间的长短由按键的机械
特性决定,一般为5ms~10ms。单片机工作时间都是纳秒与毫
秒级别,当按键按下时,在触点即将接触到完全接触这段时间里,
键盘的通断状态很可能已经改变了多次。即在这段时间里,键盘
输入了多次逻辑0和1,也就是输入处于失控状态。如果这些输
入被系统响应,则系统暂时也将处于失控状态,这是我们要尽量
避免的。在触点即将分离到完全分离这段时间也是一样的。实际
键盘的输入特性如图2所示:
键盘在输入逻辑转换时,实际上是产生了瞬时的高频干扰脉
冲。为确保CPU对键的一次闭合仅作一次处理,必须去除键抖
动。即在键闭合稳定时读取键的状态,并且必须判别到键释放稳
定后再作处理。目的在于消除干扰,以达到接近图1所示的理想
输入特性。
有两个阶段可以设法消除此干扰:1、在键盘信号输入系统
之前(系统外);2、键盘信号输入系统以后(系统内)。
1 硬件消抖
在信号输入系统之前将抖动干扰消除,可以节省系统资源,
提高系统对其他信号的响应能力,这就是硬件消抖。
1.1 基本RS硬件消抖
用两个“与非”门构成一个RS触发器,利用基本RS锁存器
的记忆作用消除开关触点振动所产生的影响。开关S每切换一
次,输出端只有一次翻转,不存在抖动波形。
1.2 电容滤波消抖
使用RS锁存器消抖只适用于单刀双掷开关,实际应用当中DOI:10.16520/https://www.doczj.com/doc/ee13981624.html,ki.1000-8519.2016.03.127 网络出版时间:2016-04-06 14:57:11
网络出版地址:https://www.doczj.com/doc/ee13981624.html,/kcms/detail/11.3927.TN.20160406.1457.084.html
常用的键盘多是两个接线端的按键。对此类按键的常用硬件消抖方法为在按键上并联电容,利用电容放电延时平波,再经过施密特反相器调整,就能够得到没有毛刺的脉冲波。
1.3 中断法消抖
每个按键都外接到外部中断口上,当有按键按下时,引起单片机的中断。此种方法的好处在于不用在主程序不断循环查询,只要有中断再去做相应处理,不足之处在于一个单片机的中断源是相当宝贵的,所以很少有人采用这种方法。
2 软件延时消抖
如前所述,若采用硬件消抖电路,那么N 个键就必须配有N 个防抖电路。因此,当按键的个数比较多时,硬件防抖将无法胜任。在这种情况下,可以采用软件的方法进行防抖。软件消抖的实质在于降低键盘输入端口的采样频率,将高频抖动略去,即检测出键闭合后执行一个延时程序,产生5ms ~10ms 的延时,让前沿抖动消失后再一次检测键的状态,如果仍保持闭合 状态电平,则确认为真正有键按下。当检测到按键释放后,也要给5ms ~10ms 的延时,待后沿抖动消失后才能转入该键的处理程序。
一般程序代码如下:
if(value == 0) //一旦检测到键值
{ Delay(); //延时20ms,有效滤除按键的抖动 if(value == 0) //再次确定键值是否有效 { …… //执行相应处理 }}
3 软件消抖的扩展应用
在实际应用中软件消抖技术并不单纯运用在按键上,也可运用于其他地方,以使程序运行更加合乎我们的要求,如下面二种情况:
1)在某些情况下,例如系统受到外部震动,也会在按键电路中出现电平抖动,但这种抖动不是控制者所希望的操作,如果没有防抖程序,那么系统会因这种不希望出现的干扰而错误动作。
2)为了避免系统误判,可以编写防抖动程序。
下面就第一种情况(在行程控制系统中)采用这种技术,看看能否提高系统性能,更好的实现功能,弥补常用方法的不足!
以一个简单的工控项目来举例说明,项目要求:上电后,一个普通电机控制一个滑块从左边往右边推,最右边有一个行程开关,滑块碰到行程开关后,电机停止,运动结束。
转化成单片机编程思路 :用1个IO 口输出,高电平时电机运动,低电平时电机停止。另1个IO 口作输入,检测行程开关的电平状态,如果发现是高电平说明还没碰上行程开关感应器,如果发现是低电平就说明碰上了感应器,此时就可以发出停止电机的命令。
思路一:直接判断行程感应器的电平状态,一旦发现低电平,就认为电机已经碰到了行程开关,马上停止电机。
这种思路的优点是响应及时,但缺点是太灵敏,抗干扰能力非常差,在工控环境里,当电机正在行进的过程中,如果受到电源的波动或者外来的毛刺信号干扰,行程开关的输入信号可能会读取到瞬间的低电平,导致单片机误判断,提前把电机停止了,电机还没碰到行程开关就草率停机。
思路二:在判断行程感应器的电平状态时,加入了软件的抗干扰处理(即软件消抖技术),一旦发现低电平,一个计时器开始计时,在计时的期间,如果发现出现高电平就马上把计时器清零,如果一直是低电平,并且期间没有出现高电平,就认为是稳定的低电平,此时判定是碰到了行程开关。
这种思路的优点是增加了抗干扰处理,几乎能百分百保证电机碰到了行程开关才停机,不会有第一种思路的误判了。
缺点是因为在软件抗干扰环节增加了一小段延时,而这一小段的延时,会导致电机碰到行程开关后没有马上停止,滑块继续往右运动一小段时间才停止,这样因为有应力存在,系统运行时间长了容易把右边的限位机械结构压坏挤坏。
思路三:本思路是结合了前面两种的优点,在判断行程感应器的电平状态时,当发现是低电平时(哪怕是干扰时出现的瞬间低电平),电机马上暂停(暂停和停止的概念不一样,虽然电机都是没有转),当发现是高电平时,电机继续运行,什么时候才认为碰到行程开关?当低电平像思路二那样连续持续低电平的时间超过某个值时,才认为碰到了行程开关。 在此判断低电平的小延时期间,电机是处于暂停的状态(没有转),所以不会过冲挤压右边的行程限位机构。
这种思路优点是既能及时响应,又增加了行程开关检测的抗干扰处理,又不会让电机过冲挤压右边的行程开关,第三种思路能够更好的实现功能,并能有效防止干扰!
传统单片机系统大多是串行处理,只能并行处理一些中断程序。对于这样的系统,只能采用单纯软件或硬件消抖,但都不那么完美。在实际的应用中,为了提高系统的稳定性和可靠性,往往是在硬件消抖技术的基础上再适当应用软件消抖技术,这样能更好的满足系统的需要。
参考文献
[1]邢远秀,陈姚节. 键盘消抖电路的研究与分析[J].中国科技
信息,2008(1):67-68.
[2] 杨立宏. 基于单片机的一种消抖方法及应用[J].无线互联科
技, 2014(07):166
[3] 印健健.基于C 语言的抗干扰消抖按键程序设计[J].数字技
术与应用2015(08):185
[4] 张松林.单片机按键防抖方法的浅析[J].科技创新导报
2010(28):56
《单片机控制技术》实验指导书 实验一流水灯实验(左移右移方式) 一. 实验项目卡编号:59010115-01 二. 实验目的 通过此实验,让大家初步掌握左移位、右移位指令的使用。 三. 实验设备 1.S51E单片机学习开发板一块 2.PC微机一台 四. 实验步骤 1.打开编译软件伟煌MCS51开发系统。 2.编写源程序并进行调试。要求:小灯先向左依次移动8次,再向右依次移动7次,随后循环 前血的工作。 3.将S51E开发板连接到PC机上。 对应的89S51与LED引脚的连线为 4.打开开发板电源,用软件将调试好的程序下载至单片机屮,观察实验现象。 五. 实验参考稈序 ORG 0000H START: MOV A, #OFFH CLR C MOV R2, #08H LOOP: RLC A MOV Pl, A LCAI1 DELAY DJNZ R2, LOOP MOV R2, #07H L00P1: RRC A MOV Pl, A LCALL DELAY DJNZ R2, L00P1 JMP START DELAY: MOV R4, #200 DI: MOV R5, #248
DJNZ R5, $ DJNZ R4, DI RET END
实验二流水灯实验(利用查表方式) 一. 实验项目卡编号:59010115-02 二. 实验目的 通过此实验,让同学们掌握杏表指令的使用。 三. 实验设备 1.S51E单片机学习开发板一块 2.PC微机一台 四. 实验步骤 1?打开编译软件伟煌MCS51开发系统。 2.编写源程序并进行调试。要求:学习利用杏表方式,使小灯做舞台灯效果的变化,左移3 次,右移3次,闪烁3次,廷时时问为200毫秒。 3.将S51E开发板连接到PC机上。 对丿卫的89S51与LED引脚的连线为 4.打开开发板电源,用软件将调试好的程序下载至单片机屮,观察实验现象。 五. 实验参考程序 ORG 0000H MOV Pl, #00H MOV A, #00H START:MOV DPTR, STABLE LOOP: CLR A MOVC A, @A+DPTR CJNE A, #01H, L00P1 JMP START L00P1:MOV Pl, A MOV R3,#20 LCALL DELAY JMP LOOP DELAY:MOV R4,#20 DI: MOV R5,#248 DJNZ R5, $ DJNZ R4,D1 DJNZ R3, DELAY RET TABLE:DB OFEH, OFDH, OFBH, 0F7H DB OEFII, ODFII, OBFII, 07FII DB OFEH, OFDH, OFBH, 0F7H
//实例42 :用定时器T0 查询方式 P2 口8 位控制LED 闪烁 //#include
定时器的高8 }} 1KHzT1:用定时器43 实例// 音频查询方式控制单片机发出 #include
判断是否有键按下;简单硬件消抖则 是采用电容来平掉信号的毛刺。但是对稳定性要求比较高的应用则需要采用相对复杂的集成电路来实现。 1 简单键盘消抖方法 1.1 软件延时消抖 按键抖动时间的长短由按键的机械特性决定,一般为5ms~10ms,按键稳定闭合时间的长短则是由操作人员的按键动作决定的,一般为零点几秒至数秒,如图1所示。 利用软件延时消除键盘抖动所产生的毛刺信号时需设置一个定时器中断,每中断一次则读取键盘接口的信号数据,如果与上次读取的数据不一致,说明当前读取的是前沿抖动数据,将当前的数据保留,等待下次定时器中断。如果当前读取的数据和前次读取数据相同则说明读取的是稳定状态下的数据,则确认为真正有键按下。当检测到按键释放后,需要延时5ms~10ms的时间,待后沿抖动消失后才能转入该键的处理程序。 软件延时并不需要增加新的硬件,但采用这种方式来设计,一般通过软件指令或者定时器的方式来设定延时的时间,采用通用处理器,由于运行速度不一致,需要将软件做相应的修改,比较麻烦。 1.2 简单硬件消抖 采用简单的硬件延时消抖是在键盘数据线接入单片机的引脚的地方并入一小电容,利用电容的充放电原理来实现消除因键盘的抖动所产生的毛刺。如图2所示,键盘按键信号key通过由R2,C1构成的RC振荡电路,过滤到毛刺,到达MCU的引脚上。 基金项目:武汉科技大学校基金资助项目(2006XY26) 键盘消抖电路的研究与分析 邢远秀1 陈姚节2 1、武汉科技大学理学院 4300812、武汉科技大学计算机学院 430081 键盘是计算机和工业控制等领域不可缺少的输入设备,通过它可以实现人机对话,完成各种功能操作。但是,通常的按键所用开关为机械弹性开关,由于机械触点的弹性作用,一个按键开关在闭合时不会马上稳定地接通,在断开时也不会一下子断开,因而在闭合及断开的瞬间均伴随有一连串的抖动,键抖动会引起一次按键被误读多次,为了确保对按键的一次闭合仅作一次处理,必须去除按键抖动。常见的消抖方法采用软件或硬件来实现:软件消抖主要是采用延时多次读取键盘接口数据,通过比较前后两次读取键盘端口的数据来 RC振荡电路实现键盘消抖的成本相对较低,工作不是很稳定,可能出现差错(即产生抖动信号),这只适合对消除抖动要求不高的场合。 2 集成电路消抖 集成电路实现键盘消抖主要是采用双组可再触发单稳态多谐振荡器-74HC123,它可把按键所产生的小脉冲信号转换成大方波信号并送到处理器引脚进行计数。 2.1 74HC123工作原理 74HC123包括两个独立的单稳态触发 表1 74HC123功能表 图3 74HC123管脚与内部结构 图2 RC消抖电路原理图 图1 按键波形图
按键消抖与时间按键 这篇文章写给正在学51单片机的或者刚入门51单片机准备进阶的的朋友,我们来着重讨论一下按键消抖和时间按键这两项。 我们常用的按键大多都是机械的,机械开关就会出现机械振动,这个由物理学或者实验可以推出来,抖动会在单片机上面出现重复扫描次数,次数多少与单片机的时钟晶振有关,时钟晶振越高单片机执行速度越快,重复次数就越多 整个按键数百ms 按下瞬间,抖动时间大概10ms 弹起瞬间,抖动大概10ms 按键一次出现的电平变化 (上面的时间都是老师说的和书上现成的,没有实际测试,而且不同的按键应该也会有差异,作为学习研究确实不应该,找个时间锅锅会测出这个时间供大家参考,嘿嘿) 由图我们可以看出,按下去瞬间会出现抖动,弹起来也会出现抖动,明显是个阻尼振动,按键扫描程序是按顺序执行的; 首先提出三个问题大家思考一下 1.为什么要消除抖动 2.如何消抖 3.是不是按键都要消抖,不是的话,哪些需要消抖,哪些不需要消抖 4.消抖的时间是不是必须10ms 5.按键消抖的方式是不是一定像书上的那样,如何消抖更节省CPU,且更简单 按键如果不消除抖动,那么单片机检测到的低电平的次数就不止一次,那我们按键一次,单片机会检测到多次,比如我们把按某个按键设置按一次成某个变量加1,结果按一次就加了很多次,这样我们就不能精确的通过按键来调整我们想要的参数,所以我们消除抖动的目的就是要实现按一次按键让单片机读出一次按键操作 消抖分硬件和软件消抖, 硬件消抖有《模拟电子技术》上提到用三态门实现,当然还有周立功那个7920(管理数码管和按键的芯片),当然还有很多硬件电路以及一些按键有自带消抖电路,但是如果要做产
单片机中断程序大全公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
//实例42:用定时器T0查询方式P2口8位控制L E D闪烁#include
#include
//实例42:用定时器T0查询方式P2口8位控制LED闪烁#include
一、按键消抖 1.1 计数器型消抖电路(一) 计数器型消抖电路(一)是设置一个模值为(N+1)的控制计数器,clk在上升沿时,如果按键开关key_in='1',计数器加1,key_in='0' 时,计数器清零。当计数器值为2时,key_out 输出才为1,其他值为0时。计数器值为N时处于保持状态。因此按键key_in持续时间大于N个clk时钟周期时,计数器输出一个单脉冲,否则没有脉冲输出。如果按键开关抖动产生的毛刺宽度小于N个时钟周期,因而毛刺作用不可能使计数器有输出,防抖动目的得以实现。clk的时钟周期与N的值可以根据按键抖动时间由设计者自行设定。 主要程序结构如下: 图1是N为3的波形仿真图,当按键持续时间大于3个时钟周期,计数器输出一个单脉冲,其宽度为1个时钟周期,小于3个时钟周期的窄脉冲用作模拟抖动干扰,从图1可以看出,抖动不能干扰正常的单脉冲输出。 1 按键抖动产生原因分析 绝大多数按键都是机械式开关结构,由于机械式开关的核心部件为弹性金属簧片,因而在开关切换的瞬间会在接触点出现来回弹跳的现象。虽然只是进行了一次按键,结果在按键信号稳定的前后出现了多个脉冲,如图1所示。如果将这样的信号直接送给微处理器扫描采集的话,将可能把按键稳定前后出现的脉冲信号当作按键信号,这就出现人为的一次按键但微处理器以为多次按键现象。为了确保按键识别的准确
性,在按键信号抖动的情况下不能进入状态输入,为此就必须对按键进行消抖处理,消除抖动时不稳定、随机的电压信号。机械式按键的抖动次数、抖动时间、抖动波形都是随机的。不同类型的按键其最长抖动时间也有差别,抖动时间的长短和按键的机械特性有关,一般为5~10 ms,但是,有些按键的抖动时间可达到20 ms,甚至更长。所以,在具体设计中要具体分析,根据实际情况来调整设计。 2 按键消抖电路的设计 按键消抖一般采用硬件和软件消抖两种方法。硬件消抖是利用电路滤波的原理实现,软件消抖是通过按键延时来实现。在微机系统中一般都采用软件延时的消抖方法。在用可编程逻辑器件FPGA/CPLD设计数字系统中,也可以用VHDL语言设计相应的时序和逻辑电路,对按键信号进行处理,同样可以达到消抖目的。本文利用Altera公司的可编程逻辑器件CPLD和QuartusⅡ,设计性能可靠的按键消抖电路。 2.1 按键消抖电路设计原理 按键消抖的关键是提取稳定的低电平(或高电平)状态,滤除按键稳定前后的抖动脉冲。在用基于VHDL 语言的时序逻辑电路设计按键消抖电路时,可以用一个时钟脉冲信号对按键状态进行取样,当第一次采样到低电平时,启动延时电路,延时结束后,再对按键信号进行连续三次取样,如果三次取样都为低电平,则可以认为按键已经处在稳定状态,这时输出一个低电平的按键确认信号,如果连续三次的取样中,至少有一次是高电平,则认为按键仍处在抖动状态,此时不进行按键确认,按键输出信号为高电平。 2.2 按键消抖电路设计 该控制电路采用VHDL语言的有限状态机的设计方法来描述和实现,其状态转换图如图2所示。
基于verilog按键消抖设计 Aaron malone 关于键盘的基础知识,我就以下面的一点资料带过,因为这个实在是再基础不过的东西了。然后我引两篇我自己的博文,都是关于按键消抖的,代码也正是同目录下project里的。这两篇博文都是ednchina的博客精华,并且在其blog 首页置顶多日,我想对大家会很有帮助的。 键盘的分类 键盘分编码键盘和非编码键盘。键盘上闭合键的识别由专用的硬件编码器实现,并产生键编码号或键值的称为编码键盘,如计算机键盘。而靠软件编程来识别的称为非编码键盘。 在单片机组成的各种系统中,用的最多的是非编码键盘。也有用到编码键盘的。非编码键盘有分为:独立键盘和行列式(又称为矩阵式)键盘。 按键在闭合和断开时,触点会存在抖动现象:
从上面的图形我们知道,在按键按下或者是释放的时候都会出现一个不稳定的抖动时间的,那么如果不处理好这个抖动时间,我们就无法处理好按键编码,所以如何才能有效的消除按键抖动呢?让下面的两篇博文日志给你答案吧。 经典的verilog键盘扫描程序 从最基础的分频程序开始,但看到这个键盘扫描程序后,直呼经典,有相见恨晚的感觉,还想说一句:威百仕( VibesIC ),我很看好你!WHY?待我慢慢道来,这个程序的综合后是0error,0warning。想想自己编码的时候那个warning是满天飞,现在才明白HDL设计有那么讲究了,代码所设计的不仅仅是简单的逻辑以及时序的关系,更重要的是你要在代码中不仅要表现出每一个寄存器,甚至每一个走线。想想我写过的代码,只注意到了前者,从没有注意过后者,还洋洋自得以为自己也算是个高手了,现在想来,实在惭愧啊!学习学习在学习,这也重新激发了我对HDL设计的激情,威百仕给了我一个方向,那我可要开始努力喽! 废话说了一大堆,看程序吧:(本代码经过ise7.1i综合并下载到SP306板上验证通过)
按键开关消抖程序 实践中,单片机端口在连接开关器件时都要考虑消抖的问题,或在硬件上 增加延迟,或是增加软件延迟查询的功能模块。这里,我们考虑这样一个检测 电路:单片机连接一个开关和两个LED。程序是这样的,如果开关的消抖正确, 就点亮LED1,否则就闪亮LED2。按下开关,点亮LED1,释放开关,LED1 即熄灭。我们加入20 毫秒的消抖延迟时间。当检测到开关为低电平时,单片 机在延迟20 毫秒后再次检测开关的状态。如果此时开关状态为高,则LED2 就闪亮,如为低则点亮LED1。源代码: led1bitP2.0led2bitP2.1switch1bitP1.0ORG 0000hsetb switch1//initialize switch 1 as inputsetb led1//Turn OFF LED1setb led2//Turn OFF LED2 wait:jb switch1,wait// Wait till switch1 has been pressedcall debounce_delayjb switch1,c1_wait//switch low even after debouncing period//switch has been succesfully debouncedclr led1//Turn ON LED1jnb switch1,$//wait till switch has been releasedsetb led1//Turn OFF LED1ajmp wait c1_wait://Switch PIN high after debounce period so error in debouncingcpl led2ajmp wait debounce_delay://Subroutine for generating 20ms delaymov r7,#245l1_debounce_delay:mov r6,#40djnz r6,$djnz r7,l1_debounce_delayret END tips:感谢大家的阅读,本文由我司收集整编。仅供参阅!
军第一航空学院张宏,王德合 引言 随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。这种技术促使机器人技术也有了突飞猛进的发展,目前人们已经完全可以设计并制造出具有某些特殊功能的简易智能机器人。 1 设计思想与总体方案 1.1 简易智能机器人的设计思想 本机器人能在任意区域内沿引导线行走,自动绕障,在有光源引导的条件下能沿光源行走。同时,能检测埋在地下的金属片,发出声光指示信息,并能实时存储、显示检测到的断点数目以及各断点至起跑线间的距离,最后能停在指定地点,显示出整个运行过程的时间。 1.2 总体设计方案和框图 本设计以AT89C5l单片机作为检测和控制核心。采用红外光电传感器检测路面黑线及障碍物,使用金属传感器检测路面下金属铁片,应用光电码盘测距,用光敏电阻检测、判断车库位置,利用PWM(脉宽调制)技术动态控制电动机的转动方向和转速。通过软件编程实现机器人行进、绕障、停止的精确控制以及检测数据的存储、显示。通过对电路的优化组合,可以最大限度地利用51单片机的全部资源。
P0口用于数码管显示,P1口用于电动机的PWM驱动控制,P2,P3口用于传感器的数据采集与中断控制。这样做的优点是:充分利用了单片机的内部资源,降低了总体设计的成本。该方案总体方案见图1。 2 系统的硬件组成及设计原理 此系统的硬件部分由单片机单元、传感器单元、电源单元、声光报警单元、键盘输入单元、电机控制单元和显示单元组成,如图2所示。 2.1 单片机单元 本系统采用AT89C51单片机作为中央处理器。其主要任务是扫描键盘输入的信号启动机器人,在机器人行走过程中不断读取传感器采集到的数据,将得到的数据进行处理后,根据不同的情况产生占空比不同的PWM脉冲来控制电机,同时将相关数据送显示单元动态显示,产生声光报警信号。其中,P0用于数码管动态显示,P1.0一P1.5控制2个电机,P1.6、P1.7为独立式键盘接口,P2接传感器,P3.2接计里程的光电码盘,P3.7接声光报警单元,P3.4、P3.5、P3.6接用于显示断点数目的发光二极管。
51单片机进阶篇 ---按键的硬件消抖 本文作者:Cepark 更新时间:2010/07/20 作者博客:https://www.doczj.com/doc/ee13981624.html,
按键的硬件消抖 在上一节课中,我们介绍了使用软件延时的方法来进行消抖从而进行按键的检测,软件延时的优点是硬件电路简单,但是程序相对来讲会复杂,而且一般的延时函数是使用计数延时,这会增加CPU的负担。硬件消抖电路可以简化程序的编写,但是需要额外的器件支持。两种方法各有利弊,在不同的情况下根据不同的情况来选择使用哪一种消抖方法,这一节课我们主要介绍一下常见的硬件消抖电路。 1、RS触发器构成的消抖电路的主要原理 用R-S触发器形成消抖电路时单片机外围电路设计中的常用手段,它可以减少单片机软件对按键动作的延时和计算。要使用R-S触发器形成的消抖电路,首先用了解R-S触发器的基本工作原理图和工作特点。 R-S触发器的基本构成如图所示,它是由两个与非门交叉耦合而成,S和R是信号的输 Q既表示触发器的状态,又是触发器的输出端。 入端,低电平有效,Q和 在启动过程中,S端一旦下降到开门电平,Q端电平就会上升,反馈到门B的输入端, Q端的电平下降,反馈到门A的输入端,进一步促使门A截止,促使B由截止转向导通, Q的电平进一步下降,这样的过程,是Q端电平进一步上升,Q端电平上升的结果又会使 的门A很快截止、门B很快导通,触发器在极短的时间内完成由截止到导通的转换。通过R 段的复位时也有类似的正反馈过程发生,从而完成按键开关的消抖功能。 典型的硬件消抖方法是在单片机和检测管脚之间加入由74LS02或者其他的门电路组成的R-S触发器消抖电路。如下所示。
按键电路:常用的非编码键盘,每个键都是一个常开开关电路。 按键消抖: 通常的按键所用开关为机械弹性开关,当机械触点断开、闭合时,电压信号小型如下图。由于机械触点的弹性作用,一个按键开关在闭合时不会马上稳定地接通,在断开时也不会一下子断开。因而在闭合及断开的瞬间均伴随有一连串的抖动,如下图。抖动时间的长短由按键的机械特性决定,一般为5ms~10ms。这是一个很重要的时间参数,在很多场合都要用到。 按键稳定闭合时间的长短则是由操作人员的按键动作决定的,一般为零点几秒至数秒。键抖动会引起一次按键被误读多次。为确保CPU对键的一次闭合仅作一次处理,必须去除键抖
动。在键闭合稳定时读取键的状态,并且必须判别到键释放稳定后再作处理。按键的抖动,可用硬件或软件两种方法。 <1> 硬件消抖:在键数较少时可用硬件方法消除键抖动。下图所示的RS触发器为常用的硬件去抖。 图中两个“与非”门构成一个RS触发器。当按键未按下时,输出为1;当键按下时,输出为0。此时即使用按键的机械性能,使按键因弹性抖动而产生瞬时断开(抖动跳开B),中要按键不返回原始状态A,双稳态电路的状态不改变,输出保持为0,不会产生抖动的波形。也就是说,即使B 点的电压波形是抖动的,但经双稳态电路之后,其输出为正规的矩形波。这一点通过分析RS触发器的工作过程很容易得到验证。 <2> 软件消抖:如果按键较多,常用软件方法去抖,即检测出键闭合后执行一个延时程序,产生5ms~10ms的延时,让前沿抖动消失后再一次检测键的状态,如果仍保持闭合状态电平,则确认为真正有键按下。当检测到按键释放后,也要给5ms~10ms的延时,待后沿抖动消失后才能转入该键的处理程序。按键消抖
单片机与4x4键盘去抖松手检测程序 刚写的一个4*4 键盘,去抖 松手检测程序。项目中要用4*4 键盘,扫描的程序有。但是去抖,和松手检测的程序没有,那么为了提高效率,可靠性,以及更加合理化。到网上找了一些关于”状态机“的资料,按照它的思路写了一个,写了半天,写好一个,经过特发帖纪录一下。 //对按键扫描的值进行处理去抖松手检测 uint8_t key_scan(void) { static uint8_t key_state = 0; static uint8_t key_num_flag1=0; uint8_t temp_key_num=0; uint8_t return_key_num=0; temp_key_num=KeyMap();//读取4*4 键盘返回的按键值不要去抖 switch(key_state)//检测状态
case key_state_0: if(temp_key_num!=0) //如果按键返回不是0 说明有按键按下 { key_num_flag1=temp_key_num; //记录下第一次按键按下的值 key_state=key_state_1; //进入下一个状态去抖 } break; case key_state_1: if(temp_key_num!=0) //如果按键返回不是0 说明按键是按下的 { if(key_num_flag1==temp_key_num)//判断是否和上次记录按键值一样。 {
return_key_num=temp_key_num; // 按键仍按下,赋值给返回按键值 key_state = key_state_2; // 状态转换到键释放态 } else { key_state=key_state_0; //回到初始状态 } } else ///没有按键按下 {
按键消抖电路瞬态分析和设计 按键是仪器仪表中普遍采用的人机输入接口电路。在按键电路中必须考虑对按键的抖动进行软件消抖和硬件消抖。软件消抖具有使用硬件数量少的优点,但也具有以下两个缺点:(1)在仪器键盘电路中,多个按键安装在仪器面板上,键盘的输出通过排线连接到主控板上,此时键盘导线寄生电感和寄生电容的存在,寄生电感寄生电容和排线电阻将组成二阶振荡系统,二阶振荡将形成负电平脉冲,而负电平脉冲很容易超出数字芯片的输入最大允许电平范围,导致数字芯片容易损坏。(2)按键闭合和断开时,电压信号下降沿非常陡峭,剧烈变化的电压信号将通过互容传递到相邻导线上。硬件消抖电路的设计主要是要考虑以下三个因素:(1)消除信号的抖动,确保按键电路输出信号的平整;(2)消除信号的下冲,因为下冲电平超出了后续数字芯片的最大输入电平范围;(3)降低信号变化的速度,避免在邻线上引起容性串扰;(4)不影响按键电路的正常功能。常见的硬件消抖电路包括电容滤波消抖和触发器消抖。电容滤波消抖采用电阻和电容组成低通滤波器,具有电路结构简单可靠的优点,因此本文将重点阐述该消抖电路。1 按键消抖电路结构与电路模型图1为某仪器按键电路原理图,按键安装在仪器面板上,通过导线连接到主控板上,按键的一端接上拉电阻并连接后续电路,按键的另一端接地,当按键没有按下时,按键输出高电平,当按键按下时,按键输出低电平。图2为加上滤波电容后的按键电路。 图1 某仪器按键电路 图2 按键消抖电路 图3为按键消抖电路的电路模型。图中R0为连接按键导线的电阻,L 为导线电感,C0为导线对地电容,C f为滤波电容,C p为按键后续电路的输入电容,R i为按键后续电路的输入阻抗,R 为上拉电阻,V CC为电源电压,U为按键消抖电路的输出电压。
单片机控制技术 单片机控制技术随着材料科学、工艺技术、计算机技术的发展与进步,电路系统向着集成度极高的方向发展。CPU的生产制造技术,也朝着综合性、技术性、实用性发展。如CPU的运算位数从4位、8位…到32位机的发展,运算速度从8 MHz、32 MHz…到1.6GHz。可以说是日新月异的发展着。其中单片机在控制系统中的应用是越来越普遍了。单片机控制系统是以单片机(CPU)为核心部件,扩展一些外部接口和设备,组成单片机工业控制机,主要用于工业过程控制。要进行单片机系统设计首先必须具有一定的硬件基础知识;其次,需要具有一定的软件设计能力,能够根据系统的要求,灵活地设计出所需要的程序;第三,具有综合运用知识的能力。最后,还必须掌握生产过程的工艺性能及被测参数的测量方法,以及被控对象的动、静态特性,有时甚至要求给出被控对象的数学模型。 单片机系统设计主要包括以下几个方面的内容:控制系统总体方案设计,包括系统的要求、控制方案的选择,以及工艺参数的测量范围等;选择各参数检测元件及变送器;建立数学模型及确定控制算法;选择单片机,并决定是自行设计还是购买成套设备;系统硬件设计〔1〕,包括接口电路,逻辑电路及操作面板;系统软件设计,包括管理、监控程序以及应用程序的设计,应用系统设计包含有硬件设计与软件设计两部分〔2〕;系统的调试与试验。 1单片机控制系统总体方案的设计 确定单片机控制系统总体方案,是进行系统设计最重要、最关键的一步。总体方案的好坏,直接影响整个控制系统的性能及实施细则。总体方案的设计主要是根据被控对象的任务及工艺要求而确定的。设计方法大致如下:根据系统的要求,首先确定出系统是采用开环系统还是闭环系统,或者是数据处理系统。选择检测元件,在确定总体方案时,必须首先选择好被测参数的测量元件,它是影响控制系统精度的重要因素之一。选择执行机构,执行机构是微型机控制系统的重要组成部件之一。执行机构的选择一方面要与控制算法匹配,另一方面要根据被控对象的实际情况确定。选择输入/输出通道及外围设备。选择时应考虑以下几个问题:被控对象参数的数量;各输入/输出通道是串行操作还是并行操作;各通道数据的传递速率;各通道数据的字长及选择位数;对显示、打印有何要求;画出整个系统原理图。 单片机控制系统中控制算法的选用一般有: (1) 直接数字控制 当被控对象的数学模型能够确定时,可采用直接数字控制。所谓数学模型就是系统动态特性的数学表达式,它表示系统输入输出及其内部状态之间的关系。一般多用实验的方法测出系统的特性曲线,然后再由此曲线确定出其数学模型。现在经常采用的方法是计算机仿真及计算机辅助设计,由计算机确定出系统的数学模型,因而加快了系统模型的建立。当系统模型建立后,即可选定上述某一种算法,设计数字控制器,并求出差分方程。计算机的主要任务就是按此差分方程计算并输出控制量,进而实现控制。
关于单片机按键的抖动与消抖 在单片机的程序中,如果涉及到按键,一般都会看到几行注释着消抖 的代码。比如下面这一段:if((KeyV|0xc3)==0xff){//无键按下return 0; } mDelay(10);//延时,去键抖KeyV=P3; if((KeyV|0xc3)==0xff){//无键按下return 0; } 关于其作用与目的,有如下解释:按键在按下时会产生电平的变化,通常是由高电平变为低电平,而且这一过程也不是瞬间完成的,按键按下之后, 电平会有一段不稳定变化的时间。一般情况下,我们的程序读取这个电平变化 并做相关的动作。但由于机械按键的局限性,当系统受到外力而产生抖动或其 它动作时,也可能使系统内部产生电平变化(通常这种变化持续的时间非常短),这种现象称之为按键的抖动。这种抖动显然不是我们期望出现的,一旦程序中没有针对它进行特殊处理,这种隐患很可能导致系统执行我们不希望出现 的动作。进而可能酿成一场悲剧。避免按键抖动的操作就称之为消抖。目前,单片机的消抖主要分为软件消抖和硬件消抖。其中,软件消抖增加软件资源,但不增加硬件成本;硬件消抖反之。现在普遍采用的是软件消抖的方式。软件消抖具体的操作思路是:当监听到按键被按下时,不立刻执行相关的操作,而进行一定时间的延时(通常是50ms),之后再次检测按键是否被按下,如果 此时按键仍然被按下,则判定按键确实被按下了(因为不论是异常情况导致的 抖动还是正常情况下按键被按下产生的电平变化都会在这一段时间内过去,紧 接着的电平将会是稳定的),然后进行按键被按下之后所需要的操作,否则判 定按键未被按下,继续监听按键状态。实际上,以上所说的软件消抖的方法在 真正的软件中应用的不多,只是在练习的时候使用。真正的应用上,会在可能 产生抖动的那一段时间内等间隔多次监听按键状态(电流状态),等到数次 (可以是连续5 次)电流平稳了才确定按键被按下。按键被放开时采取同样操
按键去抖动 一、实验目的 1、学习基于VHDL 描述状态机的方法; 2、学习 VHDL 语言的规范化编程,学习按键去抖动的原理方法。 二、实验平台 微机一台(Windows XP 系统、安装QuartusⅡ等相关软件)、CPLD 学习板一块、5V 电源线一个、下载线一条。 三、设计要求 机械式轻触按键是常用的一种外围器件,由于机械原因导致的抖动会使得按键输入出现毛 刺。设计一个按键去抖动电路,并用按键作为时钟,结合计数器观察去抖动前后的效果有什么不同。 四设计方案 思路提示:按键去抖动通常采用延时判断的方法,去除按键过程中出现的毛刺。其实现过程是:当查询到按键按下时,延时一段时间再去判断按键是否仍然被按下,若是则此次按键有 效,否则看作是干扰。这可以利用状态机来实现, library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity qudou is port( clk, en: in std_logic; sp: out integer range 0 to 7); end qudou ; architecture behave of qudou is type state is (S0,s1,s2);
signal z: std_logic; signal q: integer range 0 to 2; signal a: integer range 0 to 7; signal s: state; begin p1:process(clk) begin if(clk'event and clk = '1') then if en='1' then if q=2 then q<=q; else q<=q+1; end if; else q<=0; end if; if q=2 then z<='1'; else z<='0'; end if; case s is when s0=> if (z = '0') then s<=s0;a<=a; else s<=s1;a<=a+1; end if; when s1=> if (z='0') then s<=s0;a<=a; else s<=s2;a<=a; end if; when s2=> if (z='0') then s<=s0;a<=a; else s<=s2;a<=a; end if; end case; sp<=a; end if; end process p1; end behave;
一种软件去除键抖动的方法 一种软件去除键抖动的方法 摘要:单片机控制系统中大多使用控制键来实现控制功能。消除按键瞬间的抖动是设计者必须要考虑的问题。本文介绍一种很实用的软件去抖动方法,它借助于单片机内的定时中断资源,只要运算一下逻辑表达就完成了去抖动。这个方法效率高,不耗机时且易实现。文中使用的逻辑表达式由简单卡诺图和真值表推出,使该方法的机理容易理解。文中还提供用C51单片机编程语言编写的实用例程。关键词:单片机键处理控制系统去抖动键盘概述在单片机控制系统中,通过按键实现控制功能是很常见的。对按键处理的重要环节是去抖动,包括去除按下和抬起瞬间的抖动。去抖动的方法有很多种,如使用R-S触发器的硬件方法、运用不同算法的各种软件方法等。硬件方法会增加成本和体积,对于按键较多的矩阵式键盘,会用硬件方法;软件方法用的比较普遍,但有一种加固定延时的去抖动法效率最低,它以无谓地耗费机时来实现去抖动。此处介绍的是一种软件方法。简单说来是一种运算法,配合定时中断读取按键,通过运算逻辑表达式:Keradyn=KtempKinput+Kreadyn-1(Ktemp⊙Kinput)(1) Ktemp=Kinput(2) 可以获得消除抖动的按键消息。这种方法效率高,不需耗时的循环等待,而且算法简单、使用方便。一、基本原理由于按键的按下与抬起都会有10~20ms的抖动毛刺存在,因此,为了获取稳定的按键信息,须要避开这段抖动期。设置3个变量Kready、Ktemp和Kinput,并设置定时中断周期为20ms。在定时中断服务程序中读取按键,并把读取的数据存于变量Kinput中。变量Kready中是所需要的稳定的按键信息;Ktemp是中间变量,它的值是上一次的Kinput。根据当前按键的状态,考虑到Kready中是20ms抖动后的有效键信息,则Kready、Ktemp和Kinput之间,在不同时刻的状态关系如表1所列。表 1 时刻KreadyKtempKinput1000200130104001511161117110810191101000011000 时刻1为没有键按下的初始状态;时刻2的Kinput为1,但时刻3的Kinput又变为0,说明时刻2的Kinput为1并不是有键按下,可能只是干扰,所以Kreqdy为0;时刻4同时刻2的情况类似,但是时刻4和时刻5时Kinput都为1,说明有按键按下,在时刻5时Kready为1;虽然时刻7时Kinput为0,但时刻5、6、
实验五按键消抖 一. 实验目的 1. 掌握QuartusII的硬件描述语言设计方法 2. 了解同步计数器的原理及应用 3. 设计一个带使能输入、进位输出及同步清零的增1四位N (N<16)进制同步计数器 二. 准备知识 在按键使用的过程中,常常遇到按键抖动的问题,开关在闭合(断开)的瞬间,不能一接触就一直保持导通(断开),因为开关的机械特性,重要经历接触-断开-再接触-再断开,最终稳定在接触位置,这就是开关的抖动,即虽然只是按下按键一次然后放掉,结果在按键信号稳定前后,竟出现了一些不该存在的噪声,这样就会引起电路的误动作。在很多应用按键的场合,要求具有消抖措施。按键抖动与开关的机械特性有关,其抖动期一般为5-10ms。 键按下 键稳定 前沿抖动后沿抖动 图5.1 按键电平抖动示意图 按键的消除抖动分为硬件消除抖动和软件消除抖动。硬件消除抖动一般采用滤波的方法,通常在按键两端并联一个1~10u左右的电容,有时这样也不能完全消除按键的抖动。软件消除抖动的方法有多种,常用的是延时扫描和定时器扫描。延时扫描其原理为:检测到按键操作后延时一端时间(如10ms)后,再检测是否为仍然为同样的按键操作状态,如果相同,就认为是进行了按键操作,然后对该操作进行相应的处理。定时器扫描的原理是:每隔一端时间(几毫秒)扫描一次键盘,如果连续两次(或3次)的所获得的按键状态相同,就输出按键状态,然后再对这种按键状态进行处理,这里的扫描时间间隔和连续判断按键状态的次数是有关系的,一般总时间要大于按键的抖动期。如果总时间太长,则感觉按键迟钝,太短可能不能完全消除抖动,要根据实际的情况合适的选择。 在实际电路设计中,经常采用的是软硬件相结合对按键进行消除抖动的处理方法。 本实验采用的方法:实验箱按键的硬件电路是共阳极电路,按下按键时输出到FPGA管脚的电平为低电平,松开按键时为高电平。我们采用5ms的定时器扫描FPGA管脚电平,如果连续3次为低电平时,存储连续按键状态的次数CNT的值加1,直到该计数值等于10(或再大一些),就不再累加(防止长按该值溢出而重新计数),此时认为按键已稳定,输出按键操作标志;在该过程中,一旦FPGA管脚电平为低电平就对CNT复位清零并同时对按键操作标志位复位,即一个异步复位。 本实验采用的方法:实验箱按键的硬件电路是共阳极电路,按下按键时输出到FPGA管脚的电平为低电平,松开按键时为高电平。我们采用5ms的定时器扫描采样FPGA管脚电平,如果连续3次为低电平时,可以认为此时按键已稳定,输出一个低电平按键信号;继续采样的过程中如果不能满足连续3次采样为低,则认为键稳定状态结束,这时输出变为高电平(连线3次采用信号相“或”),