激光探测技术概论
电子1002班 LZ
摘要:
激光探测系统的作用是将接受的激光信号变化变成电信号,也就是说将光信息转皇城电信息,并通过不同的信息处理方法来获取不同的信息并实现探测目的,激光探测技术按探测方式分为直接探测和外差探测两种,按探测器的方式分类,可分为单元探测和多元阵列探测,本文即从探测方式的角度,对激光探测技术的原理、应用等四方面进行综合阐述。
关键字:激光探测直接探测外差探测干扰
1.引言
随着光技术的不断发展,激光越来越多的走入科技和生活,其激光探测技术也随着光技术的进步取得了很大的进步。激光探测就是激光信号通过探测器转换成电信号的过程。通常用光电型探测器或光热型探测器探测激光信号。激光探测在激光接收以及激光测距、通信、跟踪、制导、雷达等研究和应用中具有重要的作用。
2. 激光探测技术原理
激光的最初中文名叫做“镭射”,是它的英文名称LASER的音译,是取自英文Light Amplification by Stimulated Emission of Radiation的各单词的头一个字母组成的缩写词。意思是“受激辐射的光放大”[1]。激光的英文全名已完全表达了制造激光的主要过程。1964年按照我国著名科学家钱学森建议将“光受激发射”改称“激光”。激光是20世纪以来,继原子能、计算机、半导体之后,人类的又一重大发明,被称为“最快的刀”、“最准的尺”、“最亮的光”和“奇异的激光”。激光是在有理论准备和生产实践迫切需要的背景下应运而生的,它一问世,就获得了异乎寻常的飞快发展,激光的发展不仅使古老的光学科学和光学技术获得了新生,而且导致整个一门新兴产业的出现。
激光的产生:原子或分子等微观粒子具有高能级E2和低能级E1,在两能级间存在着自发发射跃迁、受激发射跃迁和受激吸收跃迁等三种过程。受激发射跃迁所产生的受激发射光,与入射光具有相同的频率、相位、传播方向和偏振方向。一个原子从高能阶降到低能阶时,会放出一个光子,原子在高能阶时受到一个光子的撞击,就会受激而放出另外一个相同的光子,变成两个光子,如果受激放光
的过程持续产生,则所发出来的光子便会越来越多[2]。利用共振腔,把由光放大器所产生的光线用反射镜局限在一个特定的范围内,让光线可以来回反射;透过共振腔的作用,能让光线行进的方向完全相同,能量足够大时就会有光子射出,从而产生激光。
2.1直接探测技术
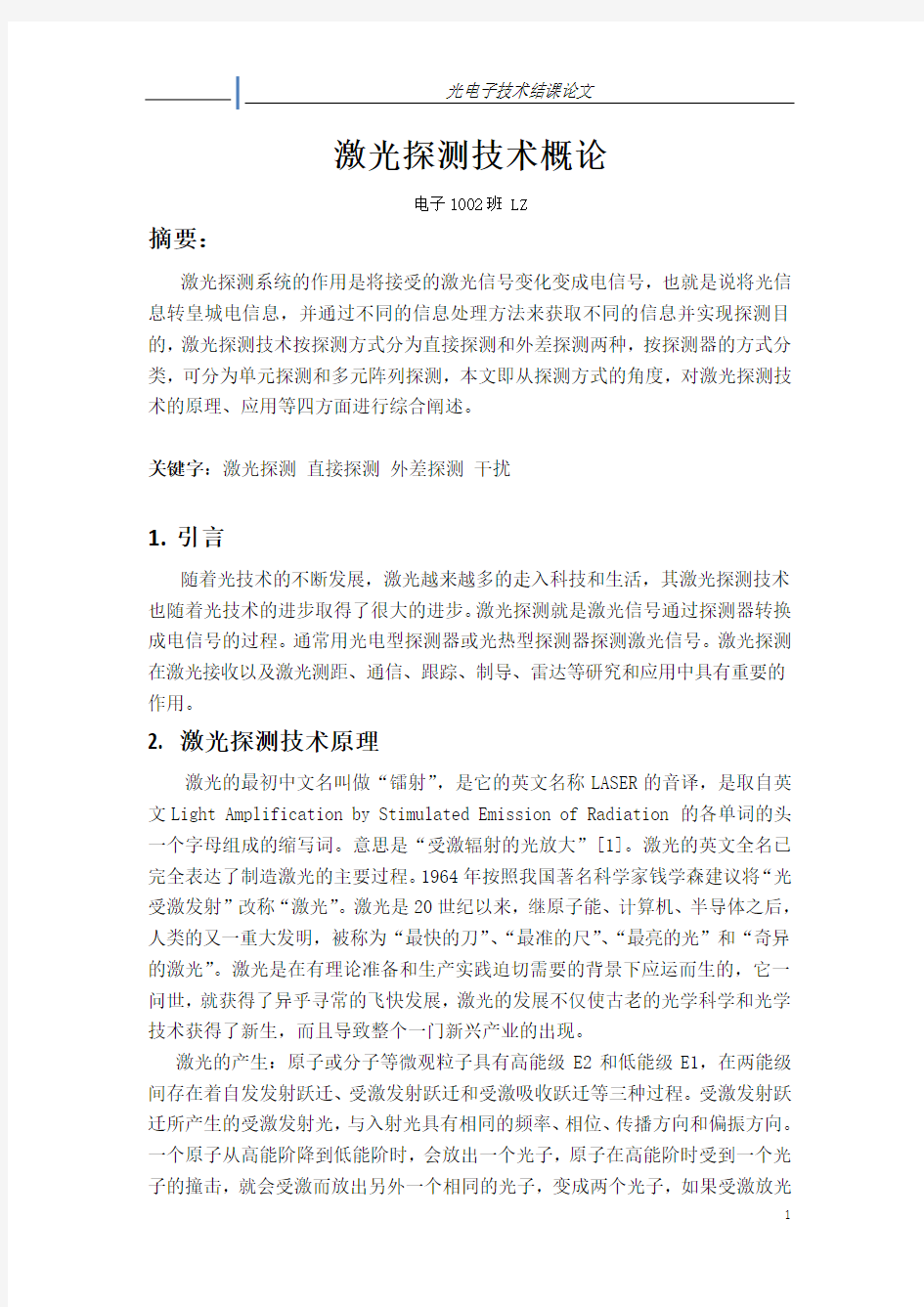
直接探测就是将激光信号直接转换成电信号。光电探测器输出的电信号幅度正比于接受的光功率。不要求具有相干性,因此这种探测方法又称为非相干探测,图1为直接探测原理框图。
图1 直接探测原理框图
光电探测器的基本功能是把入射到探测器上的光功率转换为相应的光电流,光电流是光电探测器对入射光功率的响应,如果传递的信息表现为光功率的变化,利用光电探测器的直接光电转换功能就能实现信息的直接解调。
目前,绝大多数激光雷达采用直接探测方法,如激光火控测量系统、激光测距系统、激光侦查几桶、大气雷达等。这主要是由于直接探测具有以下优点:探测技术简单,较容易获得所需信息;探测信息可靠性、长期稳定性好;工作环境适应性强,环境温度和大气压强探测系统影响小;结构简单、体积小等。
2.2外差探测技术
2.2.1光外差探测原理
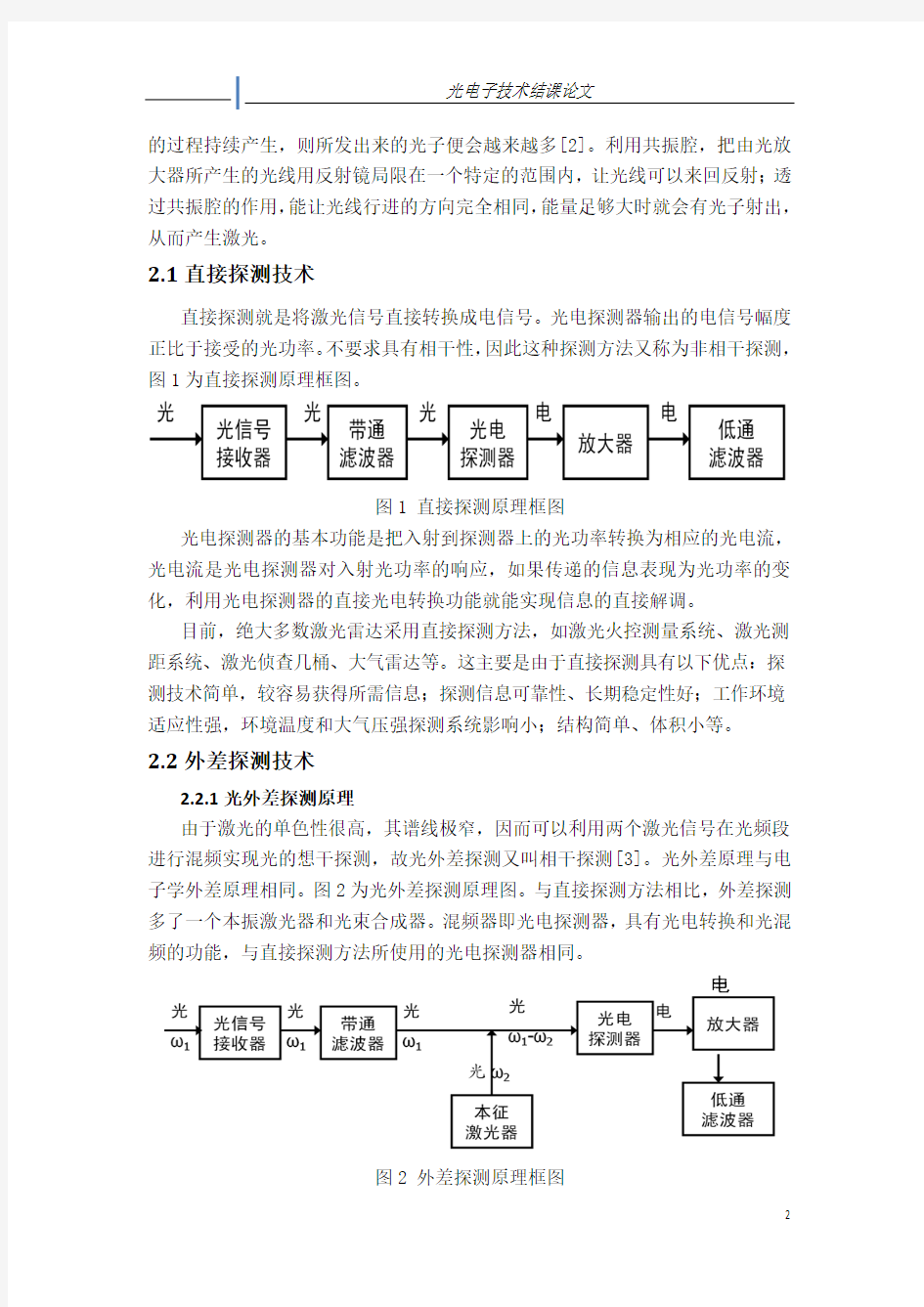
由于激光的单色性很高,其谱线极窄,因而可以利用两个激光信号在光频段进行混频实现光的想干探测,故光外差探测又叫相干探测[3]。光外差原理与电子学外差原理相同。图2为光外差探测原理图。与直接探测方法相比,外差探测多了一个本振激光器和光束合成器。混频器即光电探测器,具有光电转换和光混频的功能,与直接探测方法所使用的光电探测器相同。
图2 外差探测原理框图
两束光频率相近的激光信号和本振光通过光束合成后,在光电探测器光敏面上相干涉(电子学成为混频)产生干涉条纹,其变化速度取决于信号光与本振光的差频项,光差频为:
式中,f为激光信号频率;f
为本振激光频率;差值为光频差。
虽然探测器不相应很高的光频变化,但对差频变化能很好响应,故能输出广外查信号电流即差频电流,它包含了光信号的幅度、频率和相位信息。与直接探测相比,外差探测逼近能探测信号的强度,还能探测光频变化。
外差探测用于速度测量,与无线点测速原理一样,由于多普勒效应,运动目标反射的激光频率相对于照射激光频率有微笑变化,采用光外差测量频率变化值得出目标速度,称多普勒测速。由于速度引起的频率变化值与入射光频率程正比,而光频很高,因此采用外差测速的精度是很高的,斌更可以测量很小的运动速度。
2.2.2微波调制激光强度的外差探测原理
在这种技术体制中,外差的本振频率时微波频率,而不是光频。由于外差接收技术既复杂,又不稳定,在有些激光测量雷达中,激光作为载波,采用微薄或高频信号对激光进行强度调制,这样就可以对激光进行直接探测,通过外差探测出调制频率的频移,从而求得目标运动速度。
2.3外差检测与直接检测的性能比较
1)探测能力强:光波的振幅、相位及频率的变化都会引起光电探测器的输出,因此外差探测不仅能够检测出振幅和强度调制的光波信号,而且可以检测出相位和频率调制的光信号。
2)转换增益高:外差探测时经过光电接收器输出的电流幅值为。
3)滤波性能好
4)差频信号是由具有恒定频率(近于单频)和恒定相位的相干光混频得到的,只有激光才能实现外差探测
3. 激光探测的干扰及抗扰措施
3.1 噪声组成
背景干扰噪声。包括太阳的直射或经地物漫反射的杂散光,在中红外波段主要是来自背景的自热辐射。探测器的几种主要的固有噪声:散粒噪声,与光电探测器的暗电流有关,与工作频率无关;热噪声,任何电阻材料都有热噪声,与工作温度成正比;放大器噪声。
3.2 抗干扰措施
①合理选择接收视场,插入窄带滤光片,抑制背景光干扰;
② 合理选择发射激光的调制波型,以获得最好的信噪比;
③ 采用抗干扰能力的探测方法;
④ 信号处理中,采用适当的处理措施;如采用低噪、高增益前置放大器。采用双鉴相电路等。
4. 激光探测器的应用
3.1 激光探测器
用于激光雷达的探测器分为两大类,:外光电效应探测器和内光电效应探测器[4]。常用的光电倍增管、微通道板管、像增强管和条纹管都属于外光电效应探测器,其中,前两者那对单个光子的能量比较灵敏,并具有较高的内增益,它们一般应用于可见光激光波长、微型信号、相应速度较高的场合。后两者用于激光成像探测。内光电效应探测器是一种PN型半导体器件,如常用的硅光二极管、PIN管、雪崩光电二极管、多元阵列半导体探测器,该类探测器从可见光到近红外波段都具有良好的光电转换性能。
3.2 引信
激光探测器在军事中的应用主要为引信,其中包括:触发引信(机械引信)、近炸引信(电子引信)、执行引信。
其中近炸引信是通过目标出现时周围空间物理场特性的变化感觉目标的存在,并在预定的位置适时起爆战斗部的一种引信[5]。按其借以传递目标信息的物理场的来源可分为主动式、半主动式和被动式三类;根据对目标的探测方式不同有无线电近炸、磁近炸、红外近炸、激光近炸、电容近炸、毫米波近炸等。
激光近炸引信的优点:为无线电探测技术提供了必要的补充;发射波束窄,发射信号不易被敌方接收;接收视场有限,使地方干扰机瞄准困难;发射峰值功率较大、方向性好,探测距离远;工作于光波波段,波长极小,使其角度和距离分辨率极高;发射波束旁瓣小,对地、海杂波的干扰抵抗能力较强[6]。
4. 激光探测技术的应用前景
1、反武装直升机激光近炸引信技术;
2、激光成像引信(比红外成像更准确);
3、远距离定高母弹开仓引信;
4、激光引信测高与引爆一体化技术;
5、迫弹通用多选择激光近炸引信;
6、高定距精度云爆弹激光近炸引信;
参考文献:
[1] 梅遂生. 光电子技术[M]. 第二版. 北京:国防工业出版社, 2008:85-86.
[2] 侯宏录. 光电子材料与器件[M]. 北京:国防工业出版社, 2012年:25-26.
[3] 安毓英. 光电子技术[M]. 第三版. 电子工业出版社, 2012:79-80.
[4] 石顺祥. 光电子技术及其应用[M]. 科学出版社, 2010:52-54.
[5] 张珂姝. 高分辨激光探测技术的几个相关问题[J]. 激光雷达成像技术及应用, 2012(5):56.
[6] 陈鹤鸣. 激光原理及应用[M]. 电子工业出版社, 2009.
探测器原理大全 (2) 激光入侵探测器 激光与一般光源相比有如下特点: a.方向性好,亮度高。一束激光的发散角可做到小于10-3~10-5弧度,即使在几公里以外激光光束的直径也仅扩展到几毫米或几厘米。由于激光光束发散角小,几乎是一束平行光束,光束能聚集在一个很小的平面上,产生很大的光功率密度,其亮度很高。 激光光源和其它光源的亮度比较: 光源亮度(w/Sr?cm2) 蜡烛0.5 电灯470 太阳表面0.165M 氦-氖激光15M 红宝石激光10亿兆~37亿兆 b.激光的单色性和相干性好。 激光是单一频率的单色光,如氦氖激光器的波长为6328?,在其频率范围内谱线宽度ΔU=10-1Hz,而其他一般光的ΔU = 107-109 Hz。光的相干性取决于其单色性。 光的相干长度δm与谱线宽度的关系是: δm=c/ΔU,其中c为光速。 一般光源的相干长度为几个毫米。单色光源氦-86灯,λ=6057?,相干长度 δm=38.6cm;而氦氖激光器λ= 6328?,δm=40km。
按激光器的工作物质来分,激光器可分为如下几种: 固体激光器:它的工作物质为固体,如钕玻璃、红宝石等。 液体染料激光器:它的工作物质为液体染料,如若丹明香豆素等。 气体激光器:它的工作物质是二氧化碳、氦-氖、氮分子等。 半导体激光器:它的工作物质是半导体材料,如砷化镓。 激光探测器与主动红外式探测器有些相似,也是由发射器与接收器两部分构成。发射器发射激光束照射在接收器上,当有入侵目标出现在警戒线上,激光束被遮挡,接收机接收状态发生变化,从而产生报警信号。 激光探测器的作用距离: 式中 P1——激光功率; QT——光束发散角; M——调制光速调制度; SR——接收面积; PR——接收到的功率。 由上式可以看出,要提高探测器的作用距离,应增大激光源的发射光率,增加光学系统的透过率,减少发射装置的发散角,也可采用高灵敏的光电传感器。 激光具有高亮度,高方向性,所以激光探测器十分适用于远距离的线控报警装置。由于能量集中,可以在光路上加装反射镜,围绕成光墙,从而可以用一套激光器来封锁场地的四周,或封锁几个主要通道路口。
目录 摘要 (1) 关键词 (1) Abstract (1) Key words (1) 引言 (1) 1雷达与激光雷达系统 (2) 2激光雷达测距方程研究 (3) 2.1测距方程公式 (3) 2.2发射器特性 (4) 2.3大气传输 (5) 2.4激光目标截面 (5) 2.5接收器特性 (6) 2.6噪声中信号探测 (6) 3伪随机m序列在激光测距雷达中的应用 (7) 3.1测距原理 (7) 3.2 m序列相关积累增益 (8) 3.3 m序列测距精度 (8) 4脉冲激光测距机测距误差的理论分析 (9) 4.1脉冲激光测距机原理 (9) 4.2 测距误差简要分析 (10) 5激光雷达在移动机器人等其它方面中的应用 (10) 6结束语 (11) 致谢 (12) 参考文献 (12)
激光雷达测距原理与其应用 摘要:本文简单介绍激光雷达系统组成,激光雷达系统与普通雷达系统性能的对比,着重阐述激光雷达测距方程的研究。针对激光远程测距中的微弱信号检测,介绍一种基于m序列的激光测距方法,给出了基于高速数字信号处理器的激光测距雷达数字信号处理系统的实现方案,并理论分析了脉冲激光测距机的测距误差。了解并学习激光雷达在移动机器人等其它方面中的应用。 关键词:激光雷达;发射器和接收器特性; 伪随机序列; 脉冲激光;测距误差 Applications and Principles of laser radar ranging Student majoring in Optical Information Science and Technology Ren xiaonan Tutor Shang lianju Abstract:This paper briefly describes the composition of laser radar systems, laser radar system and radar system performance comparison of normal, focusing on the laser radar range equation. Laser Ranging for remote signal detection, presents a introduction of a sequence based on laser ranging method m, gives the high-speed digital signal processor-based laser ranging radar digital signal processing system implementations, and theoretical analysis of the pulse Laser rangefinder range error.We understand and learn application of Laser radar in the mobile robot and other aspects. Key words:Laser radar; Transmitter and receiver characteristics;Pseudo-random sequence;Pulsed laser;Ranging error. 引言:激光雷达是传统雷达技术与现代激光技术相结合的产物,激光具有亮度 高、单色性好、射束窄等优点,成为光雷达的理想光源,因而它是目前激光应用主要的研究领域之一。激光雷达是一项正在迅速发展的高新技术,激光雷达技术从最简单的激光测距技术开始,逐步发展了激光跟踪、激光测速、激光扫描成像、激光多普勒成像等技术,使激光雷达成为一类具有多种功能的系统。利用激光作为遥感设备可追溯到30多年以前,从20世纪60年代到70年代,人们进行了多项试验,结果都显示了利用激光进行遥感的巨大潜力,其中包括激光测月和卫星激光测距。激光雷达测量技术是一门新兴技术,在地球科学和行星科学领域有着广泛的应用.LiDAR(LightLaser Detection and Ranging)是激光探测及测距系统的简称,通常指机载对地激光测距技术,对地激光测距的主要目标是获取地质、地形、地貌以及土地利用状况等地表信息。相对于其他遥感技术,LIDAR的相关研究是一个非常新的领域,不论是在提高LIDAR数据精度及质量方面还是在丰富LIDAR数据应用技术方面的研究都相当活跃。随着LIDAR传感器的不断进步,地表采点密度的逐步提高,单束激光可收回波数目的增多,LIDAR数据将提供更为丰富的地表和地物信息。激光测距可分为星载(卫星搭载)、机载(飞机搭载)、车载(汽车搭载)以及定位(定点测量)四大类,目前激光测距仪已投入使用,激光雷达正处在试验阶段,某些激光雷达已付诸实用.本文对激光雷达的测距原理、发射器和接收器特性、束宽、大气传输以及目标截面、外差效率进行分析, 提出基于伪随机序列的激光测距技术 ,可将激光
光学辐射探测的应用 ——基于红外成像的生命探测仪1光学辐射探测简介 光学辐射是波长10nm~1mm之间的电磁辐射,包括紫外光、红外光以及可见光,可见光波长380~780nm,由于光波是电磁波的一种,因而它具有电磁波的基本特性。以电磁波形式或粒子(光子)形式传播的能量,可以用平面镜、透镜或棱镜之类的光学元件反射、成像或色散,这种能量传播的过程称为辐射。辐射度学:是一门测量电磁辐射的科学和技术。在整个电磁辐射波谱范围内,不同波段的辐射能可以用不同的测量方法进行测量[1]。 光辐射探测器是一种用来探测光辐射的器件(军用光学中最常用的是可见光和红外辐射),它通过把光辐射转换成易于测量的电量来实现对光辐射的探测,是光探测系统的重要组成部分。为了深入研究光辐射的探测过程以及对光探测系统的性能进行正确的分析计算,首先要了解光辐射探测器赖以工作的物理效应、光电转换的基本规律和光辐射探测器的特性参数。 从不同的角度出发可以将光辐射探测器分为不同的类型。按其是否成像可以分为成像型和非成像型辐射探测器,按工作方式可以分为相干探测和非相干探测,按其反应机理可以分为光子探测器和热探测器,按其结构可分为单元和多元探测器,下面就部分类型进行介绍: 热探测器是基于光辐射与物质相互作用的热效应制成的器件。这是一类研究最早并且较早得到实际应用的探测器。由于其中的相当多探测器不需制冷,以及在全部波长上具有平坦响应两大特点,一直有广泛的应用。而另外由于其在红外热辐射领域具有较好的大气传输特性,因此,红外热辐射的探测近年已经成为军事及民用发展的重要方向。 2红外热成像技术 红外热成像技术最早在军事领域得到广泛应用,并且已经成为军事应用中具有重要战略地位的高新技术手段。除此之外,红外成像技术还应用于各个方面,比如:应用于卫星的侦查、遥感和预警,对国家安全和经济利益有重大的影响;应用于战场系统中,避免电磁干扰,获取战场信息优势,成为获得胜利的主要技术;服务于飞机、舰艇、车辆的夜间导航与侦查,现代装备大部分装有红外仪器;应用于导弹的精确制导方面,成为重要反坦克导弹和肩射地空导弹发射的热瞄具;广泛应用于海上巡逻与救援、编队航行等方面。 红外热成像技术还应用于国民经济领域。航天系统中,利用气象卫星等设备进行天气预报,对国民经济有重大影响。热成像技术不仅能够在灾难发生后进行生命的探测,而且还可以预报地震的发生,利用卫星的红外云图可以发现,地震之前,震区的上空空气的温度会急剧升高,可以判断出这片区域的异常以进行预测。在工业领域,已应用于输电线、变压器等装置的带电检测和检查炉体的温度分布。在飞机、轮船、汽车方面的安装,避免了雾天的相撞事故的发生,保证了夜间的行车安全。随着热成像技术水平的不断提高和科学技术不断发展,必将能应用于更多新领域[2]。 灾后现场环境极为复杂,传统的光学探生仪和声波/振动探生仪极易受到现
激光检测技术研究现状与发展趋势 提要:激光检测学科发展现状在光电检测领域,利用光的干涉、衍射和散射进行检测已经有很长的历史。由泰曼干涉仪到莫尔条纹,然后到散斑,再到全息干涉,出现了一个个干涉场,物理量(如位移、温度、压力、速度、折射率等)的测量不再需要单独测量,而是整个物理量场一起进行测量。自从激光出现以后,电子学领域的许多探测方法(如外差、相关、取样平均、光子计数等)被引入,使测量灵敏度和测量精度得到大大提高。用激光检测关键技术(激光干涉测量技术、激光共焦测量技术、激光三角测量技术)实现的激光干涉仪、激光位移传感器等,可以完成纳米级非接触测量。可以说,超精密加工技术将随着高精密激光检测技术的发展而发展;在此基础上,提出了激光测量需解决的关键技术及今后的发展方向。 1.测量原理 1.1激光测距原理 先由激光二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。
1.2激光测位移原理 激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。 2.激光测量系统的应用 激光功率和能量是描述激光特性的两个基本参数,激光功率计和能量计是最常用的两类激光测量仪器。随着激光技术的不断发展,对激光测试技术和测量仪器提出了更高要求。由于调Q和锁模激光的出现和应用,要求测量的激光功率已从毫瓦、瓦、千瓦、兆瓦直到千兆瓦以上。激光能量也从毫焦尔逐渐跨过千焦尔。脉冲激光的持续时间也由毫秒、微秒、毫微秒、而缩短至微微秒量级。光谱范围也从紫外、可见、红外扩展到近毫米波段。激光精密测量和某些生物医学方面的研究和应用(如眼科治疗、细胞手术器等)的发展,对激光测量的精度也提出了非常高的要求。 2.1激光非球面检测技术 长期以来,非球面检测技术一直制约着非球面制造精度的提高,尤其对于高精度非球面的检测。规的非球面检测方法如刀口阴影法、激光数字干涉法及接触式光栅测量法等,对于检测工件表面来说都有一定的局限性。原子力显微镜是利用纳米级的探针固定在可灵敏操控的微米级尺度的弹性悬臂上,当针尖很靠近样品时,其顶端的原子与
一、单选题 23. 重带电粒子与物质相互作用时的电离损失率与以下哪个参数值的平方成正比。( A )---26 A. 重带电粒子的电荷z B. 重带电粒子速度V C. 重带电粒子质量m D. 靶物质的原子序数Z 24. 重带电粒子与物质相互作用时的电离损失率与以下哪个参数值无关。(C )---26 A. 重带电粒子的电荷z B. 重带电粒子速度V C. 重带电粒子质量m D. 靶物质的原子序数Z 25. 粒子在物质中运行沿着入射方向(A),叫做入射粒子在该物质中的射程。---27 A. 所能达到的最大直线距离 B. 经过的最小直线距离 C.经过的路程 D. 平均路程 26.在实际测量工作中,为了减少轫致辐射对测量的干扰,往往在屏蔽材料内层衬一层轻元素物质(如铝、有机玻璃等),这是因为:(C )---30 A. β射线在重元素物质中不会产生轫致辐射 B.β射线在轻元素物质中不会产生轫致辐射 C. 在重元素物质中比在轻元素物质中的韧致辐射作用大得多 D. 在重元素物质中比在轻元素物质中的韧致辐射作用小得多 27. 所有的粒子流本质上都是电磁辐射,它们因波长(或相应的频率、能量)范围不同而各具其专门名称。以下说法正确的是( C )。---34 A. 波长长者能量高,贯穿本领强 B. 波长长者能量低,贯穿本领强 C. 波长短者能量高,贯穿本领强 D. 波长短者能量低,贯穿本领弱 28. 电磁辐射可与物质发生多种形式的相互作用,以下关于相互作用的几率描述正确的是(A )。---35 A. 相互作用的几率与入射光子的能量以及介质的性质有关 B. 相互作用的几率与入射光子的能量以及介质的性质无关 C. 相互作用的几率与入射光子的能量有关,与介质的性质无关 D. 相互作用的几率与入射光子的能量无关,与介质的性质有关 29. 以下描述的是X、γ光子与物质作用失去动能的过程和带电粒子在物质中失去动能的过程。正确的是( D )。---35 A. 带电粒子一次可失去其能量的全部或大部份,失去的能量转移给原子核 B. 带电粒子一次可失去其能量的全部或大部份,失去的能量转移给电子 C. 光子需许多次碰撞后,才能失去其全部动能 D. 光子一次可失去其能量的全部或大部份,失去的能量转移给电子 30. 以下是关于射线与物质作用的截面δ这个概念的叙述,正确的是(B )。---35 A. 截面就是靶体的几何截面 B. 截面就是相互作用的几率 C. 截面既不是靶体的几何截面,也不是相互作用的几率 D. 截面既是靶体的几何截面,也是相互作用的几率 31. 下列哪一个过程不会产生俄歇电子(B )。---41 A. 内转换 B. 电子对效应 C. 轨道电子俘获 D. 光电效应 32. X、γ光子与物质作用发生光电效应和康普顿效应的几率与入射光子的能量和靶物质的原子序数有关,下列说法正确的是(C )。---43 A. 光子能量越高,且靶物质的原子序数越小,光电效应发生几率大 B. 光子能量越高,且靶物质的原子序数越大,康普顿效应发生几率大
激光探测技术 激光技术用于检测工作主要是利用激光的优异特性,将它作为光源,配以相应的光电元件来实现的。它具有精度高、测量范围大、检测时间短、非接触式等优点,常用于测量长度、位移、速度、振动等参数。当测定对象物受到激光照射时,激光的某些特性会发生变化,通过测定其响应如强度、速度或种类等,就可以知道测定物的形状、物理、化学特征,以及他们的变化量。响应种类有:光、声、热,离子,中性粒子等生成物的释放,以及反射光、透射 激光技术用于检测工作主要是利用激光的优异特性,将它作为光源,配以相应的光电元件来实现的。它具有精度高、测量范围大、检测时间短、非接触式等优点,常用于测量长度、位移、速度、振动等参数。当测定对象物受到激光照射时,激光的某些特性会发生变化,通过测定其响应如强度、速度或种类等,就可以知道测定物的形状、物理、化学特征,以及他们的变化量。响应种类有:光、声、热,离子,中性粒子等生成物的释放,以及反射光、透射光、散射光等的振幅、相位、频率、偏振光方向以及传播方向等的变化。 ◆激光测距 激光测距的基本原理是:将光速为 C 的激光射向被测目标,测量它返回的时间,由此求得激光器与被测目标间的距离 d 。 即:d=ct/2 式中t-激光发出与接收到返回信号之间的时间间隔。可见这种激光测距的精度取决于测时精度。由于它利用的是脉冲激光束,为了提高精度,要求激光脉冲宽度窄,光接收器响应速度快。所以,远距离测量常用输出功率较大的固体激光器与二氧化碳激光器作为激光源;近距离测量则用砷化镓半导体激光器作为激光源。 ◆激光测长
从光学原理可知,单色光的最大可测长度L与光源波长λ和谱线宽度Δλ的关系用普通单色光源测量,最大可测长度78cm。若被测对象超过 78cm,就须分段测量,这将降低测量精度。若用氦氖激光器作光源,则最大可测长度可达几十公里。通常测长范围不超过10m,其测量精度可保证在 0.1μm 以内。 ◆激光干涉测量 激光干涉测量的原理是利用激光的特性-相干性,对相位变化的信息进行处理。由于光是一种高频电磁波,直接观测其相位的变化比较困难,因此使用干涉技术将相位差变换为光强的变化,观测起来就容易的多。通常利用基准反射面的参照光和观测物体反射的观测光产生的干涉,或者是参照光和通过观测物体后相位发生变化的光之间的干涉,就可以非接触地测量被测物体的距离以及物体的大小,形状等,其测量精度达到光的波长量级。因为光的波长非常短,所以测量精度相当高。 ◆激光雷达 激光雷达是用于向空中发射激光束,并对其散射信号光进行分析与处理,以获知空气中的悬浮分子的种类和数量以及距离,利用短脉冲激光,可以按时间序列观测每个脉冲所包含的信息,即可获得对象物质的三维空间分布及其移动速度、方向等方面的信息。如果使用皮秒级的脉冲激光,其空间分辨率可以达到 10cm以下。激光照射在物体上后,会发生散射,按照光子能量是否发生变化,散射分为弹性散射和非弹性散射两种类型。弹性散射又有瑞利散射和米氏散射之分。相对于激光波长而言,散射体的尺寸非常小时,称为瑞利散射;与激光波长相当的散射,称之为米氏散射。瑞利散射强度与照射激光波长的四次方成反比,所以,通过改变波长的测量方式就可以和米氏散射区别开。相应地,非弹性散射也有拉曼散射和布里渊散射两种。拉曼散射是指光遇到原子或分子发生散射时,由于散射体的固有振动以及回转能和能量的交换,致使散射光的频率发生变化的现象。拉曼散射所表现出的特征,因组成物质的分子结构的不同而不同,因此,将接收的散射光谱进行分光,通过光谱分析法可以很容易鉴定分子种类。所以,通过测量散射光,就可以测定空气中是否有乱气流(米氏散射),以及CO、NO等各种大气污染物的种类及数量(拉曼散射)。由此可见,激光雷达技术在解决环境问题方面占据着举足轻重的位置。
车载激光雷达测距测速原理 陈雷1,岳迎春2,郑义3,陈丽丽3 1黑龙江大学物理科学与技术学院,哈尔滨 (150080) 2湖南农业大学国家油料作物改良中心,长沙 (410128) 3黑龙江大学后勤服务集团,哈尔滨(150080) E-mail:lei_chen86@https://www.doczj.com/doc/e72977828.html, 摘要:本文在分析了激光雷达测距、测速原理的基础上,推导了连续激光脉冲数字测距、多普勒频移测速的方法,给出车载激光雷达基本原理图,为车载激光雷达系统测距测速提供了基本方法。 关键词:激光雷达,测距,测速 1.引言 “激光雷达”(Light Detection and Range,Lidar)是一种利用电磁波探测目标的位置的电子设备。其功能包含搜索和发现目标;测量其距离、速度、位置等运动参数;测量目标反射率,散射截面和形状等特征参数。激光雷达同传统的雷达一样,都由发射、接收和后置信号处理三部分和使此三部分协调工作的机构组成。但传统的雷达是以微波和毫米波段的电磁波作为载波的雷达。激光雷达以激光作为载波,激光是光波波段电磁辐射,波长比微波和毫米波短得多。具有以下优点[1]: (1)全天候工作,不受白天和黑夜的光照条件的限制。 (2)激光束发散角小,能量集中,有更好的分辨率和灵敏度。 (3)可以获得幅度、频率和相位等信息,且多普勒频移大,可以探测从低速到高速的目标。 (4)抗干扰能力强,隐蔽性好;激光不受无线电波干扰,能穿透等离子鞘,低仰角工作时,对地面的多路径效应不敏感。 (5)激光雷达的波长短,可以在分子量级上对目标探测且探测系统的结构尺寸可做的很小。当然激光雷达也有如下缺点: (1)激光受大气及气象影响大。 (2)激光束窄,难以搜索和捕获目标。 激光雷达以自己独特的优点,已经被广泛的应用于大气、海洋、陆地和其它目标的遥感探测中[14,15]。汽车激光雷达防撞系统就是基于激光雷达的优点,同时利用先进的数字技术克服其缺点而设计的。下面将简单介绍激光雷达测距、测速的原理,并在此基础上研究讨论汽车激光防撞雷达测距、测速的方法。 2. 目标距离的测量原理 汽车激光雷达防撞系统中发射机发射的是一串重复周期一定的激光窄脉冲,是典型的非相干测距雷达,对它的要求是测距精度高,测距精度与测程的远近无关;系统体积小、重量轻,测量迅速,可以数字显示;操作简单,培训容易,有通讯接口,可以连成测量网络,或与其他设备连机进行数字信息处理和传输。 2.1测距原理 激光雷达工作时,发射机向空间发射一串重复周期一定的高频窄脉冲。如果在电磁波传播的
仪器科学与测试技术专业(Instrument Science and testing technology)学术型硕士研究生培养方案 (学科专业代码:99J1 授予工学硕士学位) 一、学科专业简介 仪器科学与测试技术是综合应用传感技术、光电技术、精密机械、信号与信息处理技术、现代电子技术、计算机技术、自动控制技术等,研究和探索仪器科学与测试领域的新技术、新方法,推动仪器科学与测试系统的智能化、网络化、集成化。主要研究获取、存储、处理、传输和利用信息的现代科学技术及仪器,包括测控技术及仪器、现代传感技术、精密计量理论与应用、虚拟仪器、微系统理论与应用、微小型机电系统、智能结构系统与技术、信号分析与数据处理、矿用仪器仪表等,是机、电、光、计算机、材料科学、物理、化学、生物学等先进技术的高度综合,它既是知识创新和技术创新的前提,也是创新研究的主体内容之一。 二、培养目标 1、重点培养具有良好的职业素养、坚实的仪器科学与测试技术基础理论的高层次光电产业、能源、电力行业专门技术人才; 2、培养掌握仪器科学测试理论和技术专业知识,运用先进现代测试技术、方法解决煤炭、电力、光电等行业关键理论和技术的专门人才; 3、培养严谨求实的科学态度和作风,具有创新求实精神和良好的科研道德,具备从事仪器科学与测试技术学科相关的研究开发能力;能胜任研究机构、高等院校和产业部门等有关方面的研究、工程、开发及管理工作; 4、较为熟练的掌握一门外国语,具有熟练地进行专业阅读和初步写作的技术人才 四、学习年限 全日制硕士研究生学制为三年;半脱产硕士研究生经申请批准,其学习年限可延长半年至一年。 五、培养环节 1、导师的确定 研究生导师的确定实行双向选择,研究生根据公布的导师名单填写双向选择表,然后由导师根据填表选择所要指导的研究生。第一志愿未落实的硕士研究生,根据学生其他志愿和实际情况,在进一步征求师生双方意见的基础上进行协调落实。 2、培养计划的确定
分时多站式激光跟踪仪测量系统 课程名称:光机电一体化 院系:机械工程学院 班级:硕3002班 姓名:周强 学号: 3113001060
目录 1 激光跟踪仪系统 (1) 1.1 激光跟踪仪系统的概述 (1) 1.2 激光跟踪仪系统的基本原理 (1) 1.2.1 系统的组成 (2) 1.2.2 激光跟踪仪系统的原理 (3) 2 分时多站式激光跟踪仪测量系统 (7) 2.1 引言 (7) 2.2 基于GPS多边形定位原理 (7) 2.3 分时测量的算法 (9) 2.3.1 激光跟踪仪基站的自标定 (9) 2.3.2 测量点坐标的标定 (10)
1 激光跟踪仪系统 1.1激光跟踪仪系统的概述 激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的大尺寸测量仪器。它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量,测量静止目标,跟踪和测量移动目标或它们的组合。SMART310是Leica公司在1990年生产的第一台激光跟踪仪,1993年Leica公司又推出了SMART310的第二代产品,其后,Leica公司还推出了LT/LTD系列的激光跟踪仪,以满足不同的工业生产需要。LTD系列的激光跟踪仪采用了Leica公司专利的绝对测距仪,测量速度快,精度高,配套的软件则在Leica统一的工业测量系统平台Axyz 下进行开发,包括经纬仪测量模块、全站仪测量模块、激光跟踪仪测量模块和数字摄影测量模块等。激光跟踪系统在我国的应用始于1996年,上飞、沈飞集团在我国第一次引进了SMART310激光跟踪系统;2005年上海盾构公司引进了Leica公司的一套LTD600跟踪测量系统,应用于三维管模的检测。 (a)API的激光跟踪仪(b) Leica的激光跟踪仪(c)Faro的激光跟踪仪 图1-1 API等公司生产的激光跟踪仪 1.2激光跟踪仪系统的基本原理 近年来,激光跟踪测量系统的应用领域在不断扩大,很多公司都相继推出了各自品牌的激光跟踪仪,但所有的激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成的。实验采用的是Leica AT 901 MR激光跟踪测量系统。
激光雷达测距测速原 理
精品文档 收集于网络,如有侵权请联系管理员删除 激光雷达测距测速原理 1. 激光雷达通用方程 激光雷达方程用来表示一定条件下,激光雷达回波信号的功率,其形式如下: r P 为回波信号功率,t P 为激光雷达发射功率,K 是发射光束的分布函数,12a a T T 分别是激光雷达发射系统到目标和目标到接收系统的大气透过率,t r ηη分别是发射系统和接收系统的透过率,t θ为发射激光的发散角,12R R 分别是发射系统到目标和目标到接收系统的距离,Γ为目标的雷达截面,r D 为接收孔径。 方程作用:激光雷达方程可以在研发激光雷达初期确定激光雷达的性能。其次,激光雷达方程提供了回波信号与被探测物的光学性质之间的函数关系,因此可以通过激光雷达探测的回波信号,通过求解激光雷达方程获得有关大气性质的信息。 2. 激光雷达测距基本原理 2.1 脉冲法 脉冲激光雷达测距的基本原理是,在测距点向被测目标发射一束短而强的激光脉冲,激光脉冲到达目标后会反射回一部分被光功能接收器接收。假设目标距离为L ,激光脉冲往返的时间间隔是t ,光速为c ,那么测距公式为L=tc/2。 时间间隔t 的确定是测距的关键,实际的脉冲激光雷达利用时钟晶体振荡器和脉冲计数器来确定时间t ,时钟晶体振荡器用于产生固定频率的电脉冲震荡 ?T=1/f ,脉冲计数器的作用就是对晶体振荡器产生的电脉冲计数N 。如图所示,信息脉冲为发射脉冲,整形脉冲为回波脉冲,从发射脉冲开始,晶振产生脉冲与计数器开始计数时间上是同步触发的。因此时间间隔t=N ?T 。由此可得出L=NC/2f 。 图1脉冲激光测距原理图 2.2 相位法
激光雷达在军事中的应用 作者 摘要:本文简要介绍激光雷达的特点、激光雷达探测的基本物理原理及其在军事领域的应用现状. 关键词:激光雷达;探测;军事应用 1.引言 激光雷达是现代激光技术与传统雷达技术相结合的产物,它像传统的微波雷达一样,由雷达向目标发射波束,然后接收目标反射回来的信号,并将其与发射信号对比,获得目标的距离、速度以及姿态等参数.但是它又不同于传统的微波雷达,它发射的不是微波束,而是激光束,使激光雷达具有不同于普通微波雷达的特点. 根据激光器的不同,激光雷达可工作在红外光谱、可见光谱和紫外光谱的波段上.相对于工作在米波至毫米波波段的微波雷达而言,激光雷达的工作波长短,是微波雷达的万分之一到千分之一,根据光学仪器的分辨率与波长成反比的原理,利用激光雷达可以获得极高的角分辨率和距离分辨率,通常角分辨率不低于0.1mrad ,距离分辨率可达0.1m , 利用多普勒效应 可以获得10m / s 以内的速度分辨率.这些指标是一般微波雷达难以达到的,因此激光雷达可获得比微波雷达清晰得多的目标图像。 激光束的方向性好、能量集中,在 20km 外,其光束也只有茶杯口大小,因而敌方难以截获,而且激光束的抗电磁干扰能力强,难以受到敌方有源干扰的影响.由于各种地物回波影响,因而在低空存在微波雷达无法探测的盲区.而对于激光雷达,只有被激光照射的目标才能产生反射,不存在低空地物回波的影响,所以激光雷达的低空探测性能好. 激光雷达体积小、重量轻,有的整套激光雷达系统的重量仅几十千克.例如为了适应海军陆战队的需要,美国桑迪亚国家实验室和伯恩斯公司都提出了手持激光雷达的设计方案.相对于重达数吨、乃至数十吨的微波雷达而言,激光雷达的机动性能显然要好得多. 任何事物都是一分为二的,激光雷达也有自身的缺陷.激光光束窄、方向性好,虽然表现出能量集中的优点,但不宜用作战场监视雷达搜索大空域.而且激光的传输受环境影响大,尤其是在雨、雪、雾的天气,激光在传输过程中的衰减更大.当然,激光在大气层外传输时不易衰减,有其得天独厚的优势.经过几十年的努力,科学家们趋利避害,已研制出多种类型的军用激光雷达. 2. 用干战场侦察的激光雷达 众所周知,普通的成像技术(如电视摄像、航空摄影及红外成像等)获得的场景图像都是反映被摄区域辐射强度几何分布的图像,而激光雷达可以通过采集方位角一俯冲角一距离一速度一强度等三维数据,再将这些数据以图像的形式显示出来,从而可产生极高分辨率的辐射强度几何图像、距离图像、速度图像等,因而它提供了普通成像技术所不能提供的信息.例如美国桑迪亚国家实验库研制的一种激光雷达,激光器功率为120MW ,显示屏幕的像素为64 X 64 元,视场内物体的图像可显示在屏幕上,每秒钟更新4 次,并用不同颜色和灰度显示物体的相对距离.这种激光雷达能对运动的装甲车辆产生实时图像,图像分辨率足以识别车辆型号. 美国雷西昂公司研制的ILR100 型砷化稼激光雷达,可安装在高性能飞机和无人机上,当飞机在120m~460m 高空飞行
第40卷 第7期 激光与红外Vol.40,No.7 2010年7月 LASER & I N FRARE D July,2010 文章编号:100125078(2010)0720685205?综述与评论?空间目标识别中的激光探测技术 黄 涛1,2,胡惠灵3,胡以华1,2,赵楠翔1,2 (1.脉冲功率激光技术国家重点实验室电子工程学院,安徽合肥230037; 2.安徽省电子制约技术重点实验室,安徽合肥230037; 3.合肥工业大学计算机与信息学院,安徽合肥230009) 摘 要:空间目标探测与识别技术是空间资源开发、空间安全等方向应用的前提条件,同其他 方式相比,激光探测具有其突出的优势。当前传统的空间监视网是以微波雷达和光学望远镜 为基础,激光探测与之相比具有系统简单、效费比高、能探测空间目标多种特征参数的优点。 介绍了激光探测空间目标中的空间目标轨道确定、几何形状估计、对装配的光学设备检测和对 空间目标的振动识别等几种目标识别技术。最后分析了激光探测在空间目标识别中存在的问 题和发展的方向。 关键词:激光探测;空间目标;识别;逆合成孔径;猫眼效应;振动识别 中图分类号:T N149 文献标识码:A Laser detecti on i n the i denti fi cati on of space t arget HUANG Tao1,2,HU Hui2ling3,HU Yi2hua1,2,Z HAO Nan2xiang1,2 (1.State Key Laborat ory of Pulsed Power Laser Technol ogy Electr onic Engineering I nstitute,Hefei230037,China; 2.Key Laborat ory of Electr onic Restricti on,Anhui Pr ovince,Hefei230037,China; 3.Hefei University of Technol ogy,School of Computer&I nf or mati on,Anhui Pr ovince,Hefei230009,China) Abstract:Space targets detecti on and identificati on is a key technol ogy in s pace app licati ons such as s pace security, attack2warning,debris detecti on ect.Among vari ous detecti on t ools,laser technol ogy has its s pecial advantages under certain conditi on.Ce mpaved with the conventi onal s pace surveillance net w ork which is composed of radar and op tical telescope,laser system can get mone infor mati on about the t orget mean while boasts mone compact size,higher efficien2 cy.The paper intr oduces how t o use laser t o deter m ine the orbit of the s pace target,how t o esti m ate the target′s shape thr ough the return signal,and how t o measure the vibrati on s pectru m of the target.A ls o intr oduced is the devel opment and future of the s pace target detecti on and identificati on by laser. Key words:laser detecti on;s pace target;identifying;inverse synthetic aperture;Cat′s eye effect;vibrati on identifica2 ti on 1 引 言 空间目标主要指各种卫星、空间碎片、空间站、航天飞机,中远程弹道导弹,以及进入地球外层空间的各种宇宙飞行物,如彗星和小行星。空间目标探测系统的任务是对重要空间目标进行精确探测和跟踪,确定可能对航天系统构成威胁的目标的任务、尺寸、形状和轨道参数等重要目标特性;对目标特性数据进行归类和分发。空间目标探测不仅可以帮助确定潜在敌人的空间能力,还可以预测空间物体的轨道,对可能发生的碰撞和对己方空间系统的攻击告警等,具有重要的军事价值[1]。 当前的空间目标探测的主要手段是以各种超远程雷达和大口径光学望远镜组成的空间的监视网对空间目标进行探测和跟踪。这种探测方式虽然能够 基金项目:国家自然科学基金项目(No.60672154)资助。 作者简介:黄 涛(1983-),男,硕士研究生,主要从事激光遥感信息处理方面的研究工作。E2mail:tao_online@https://www.doczj.com/doc/e72977828.html, 收稿日期:2010203217;修订日期:2010204207
光学干涉测量技术 ——干涉原理及双频激光干涉 1、干涉测量技术 干涉测量技术和干涉仪在光学测量中占有重要地位。干涉测量技术是以光波干涉原理为基础进行测量的一门技术。相干光波在干涉场中产生亮、暗交替的干涉条纹,通过分析处理干涉条纹获取被测量的有关信息。 当两束光亮度满足频率相同,振动方向相同以及相位差恒定的条件,两束光就会产生干涉现象,在干涉场中任一点的合成光强为: 122I I I πλ=++V 式中△是两束光到达某点的光程差。明暗干涉条纹出现的条件如下。 相长干涉(明): , () min 12I I I I ==+m λ=V 相消干涉(暗): , ()min 12I I I I ==+-12m λ? ?=+ ??? V 当把被测量引入干涉仪的一支光路中,干涉仪的光程差则发生变化。通过测量干涉条纹的变化量,即可以获得与介质折射率和几何路程有关的各种物理量和几何量。 按光波分光的方法,干涉仪有分振幅式和分波阵面式两类。按相干光束传播路径,干涉仪可分为共程干涉和非共程干涉两种。按用途又可将干涉仪分为两类,一类是通过测量被测面与参考标准波面产生的干涉条纹分布及其变形量,进而求得试样表面微观几何形状、场密度分布和光学系统波像差等,即所谓静态干涉;另一类是通过测量干涉场上指定点干涉条纹的移动或光程差的变化量,进而求得试样的尺寸大小、位移量等,即所谓动态干涉。 下图是通过分波面法和分振幅法获得相干光的途径示意图。光学测量常用的是分振幅式等厚测量技术。 图一 普通光源获得相干光的途径 与一般光学成像测量技术相比,干涉测量具有大量程、高灵敏度、高精度等特点。干涉测量应用范围十分广泛,可用于位移、长度、角度、面形、介质折射率的变化及振动等
激光雷达测距测速原理 1. 激光雷达通用方程 激光雷达方程用来表示一定条件下,激光雷达回波信号的功率,其形式如下: r P 为回波信号功率,t P 为激光雷达发射功率,K 是发射光束的分布函数,12a a T T 分别是激光雷达发 t θ为发r D 通过 定时间t ,时钟晶体振荡器用于产生固定频率的电脉冲震荡 ?T=1/f ,脉冲计数器的作用就是对晶体振荡器产生的电脉冲计数N 。如图所示,信息脉冲为发射脉冲,整形脉冲为回波脉冲,从发射脉冲开始,晶振产生脉冲与计数器开始计数时间上是同步触发 的。因此时间间隔t=N ?T 。由此可得出L=NC/2f 。 图1脉冲激光测距原理图 2.2 相位法
相位测距法也称光束调制遥测法,激光雷达相位法测距是利用发射的调制光和被目标反射的接受光之间光强的相位差包含的距离信息来实现被测距离的测量。回波的延迟产生了相位的延迟,测 出相位差就得到了目标距离。 假设发射处与目标的距离为D,激光速度为c,往返的间隔时间为t,则有: 图2相位法测距原理图 假设f为调制频率,N为光波往返过程的整数周期,??为总的相位差。则间隔时间t还可以 因为L 不能测得 优点:测量距离远,一般大于1000m。系统体积小,抗干扰能力强。 缺点:精度较低,一般大于1m。 激光雷达相位法测距: 优点:测量精度高。
缺点:测量距离较近,一般为一个刻度L内的距离。(300-1000m)。受激光调制相位测试精度和相位调制频率的限制,系统造价成本高。相位法测距存在矛盾:测量距离大会导致精度不高,要想提高精度测量距离又会受限(刻尺L较短)。 3.激光雷达测速基本原理 激光雷达测速的方法主要有两大类,一类是基于激光雷达测距原理实现,即以一定时间间隔连续测量目标距离,用两次目标距离的差值除以时间间隔就可得知目标的速度值,速度的方向根据距 它的 f 式中, d v< 反之0 f 移 d
图像测量技术读书笔记 摘要:图像测量技术是以现代光学为基础,融光电子学、计算机图形学、信息处理、计算机视觉等现代科学技术为一体的综合测量技术,是将图像处理技术应用于测量领域的一种新的测量方法。图像测量该技术把图像作为信息传递的载体,依据视觉的原理和数字图像处理技术对物体的成像图像进行分析研究,得到需要测量的信息,目前已经成功应用于很多领域。图像测量方法具有非接触、高速度、动态范围大、信息丰富等优点,受到国内外测量领域的重视。本文介绍了图像测量技术的历史背景,总结了图像测量系统的发展现状及其应用领域,并指出了图像测量技术存在的问题及今后发展的趋势。 0.引言 图像测量技术是近年来在测量领域中新兴的一种高性能测量技术。它以光学技术为基础,将光电子学、计算机技术、激光技术、图像处理技术等多种现代科学技术融合为一体,构成光、机、电、算综合体的测量系统。图像测量,就是把测量对象——图像当作检测和传递信息的手段或载体加以利用的精确测量技术。其目的是从图像中提取有用的信号,通过对获得的二维图像进行处理和分析,得到需要的三维场景的信息,最终实现测量的目的。 图像(包括视频)测量技术广泛应用于工业产品质量检测、智能交通、安防、工程变形监测、医学等各个领域,并且随着计算机技术和信息技术的发展,其实现方法和手段也日新月异。 1.研究背景 科学技术和生产活动的大规模开展及一系列重大突破催生并发展了测量学科。同时,测量器具、技术和理论的发展又促进了生产技术的发展。近代科学和工业化的发展要求测量学科一方面需要进行专业化分工;同时也要求其突破经典的测量方法,寻求新的测试原理与手段,如求助于电学、光学、计算机等,从单一学科发展为多学科间的相互借鉴和渗透,形成综合各学科研究成果的新型测量系统。 传统的几何测量方法根据测量头与被测件是否接触可分为接触式与非接触
激光雷达点云数据 LiDAR(Light Detection and Ranging),是激光探测及测距系统的简称,另外也称Laser Radar或LADAR(Laser Detection and Ranging),由激光雷达进行扫描所获取的数据,即为激光雷达点云数据。 激光雷达是用激光器作为发射光源,采用光电探测技术手段的主动遥感设备。激光雷达是激光技术与现代光电探测技术结合的先进探测方式。由发射系统、接收系统、信息处理等部分组成。发射系统是各种形式的激光器,如二氧化碳激光器、掺钕钇铝石榴石激光器、半导体激光器及波长可调谐的固体激光器以及光学扩束单元等组成;接收系统采用望远镜和各种形式的光电探测器,如光电倍增管、半导体光电二极管、雪崩光电二极管、红外和可见光多元探测器件等组合。激光雷达采用脉冲或连续波2种工作方式,探测方法按照探测的原理不同可以分为米散射、瑞利散射、拉曼散射、布里渊散射、荧光、多普勒等激光雷达。 激光雷达的特点: 与普通微波雷达相比,激光雷达由于使用的是激光束,工作频率较微波高了许多,因此带来了很多特点,主要有: (1)分辨率高 激光雷达可以获得极高的角度、距离和速度分辨率。通常角分辨率不低于0.1mard也就是说可以分辨3km距离上相距0.3m的两个目标(这是微波雷达无论如何也办不到的),并可同时跟踪多个目标;距离分辨率可达0.lm;速度分辨率能达到10m/s以内。距离和速度分辨率高,意味着可以利用距离——多谱勒成像技术来获得目标的清晰图像。分辨率高,是激光雷达的最显著的优点,其多数应用都是基于此。 (2)隐蔽性好、抗有源干扰能力强 激光直线传播、方向性好、光束非常窄,只有在其传播路径上才能接收到,因此敌方截获非常困难,且激光雷达的发射系统(发射望远镜)口径很小,可接收区域窄,有意发射的激光干扰信号进入接收机的概率极低;另外,与微波雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强,适于工作在日益复杂和激烈的信息战环境中。