遗传算法(大作业)
- 格式:doc
- 大小:105.00 KB
- 文档页数:5

人工智能试验陈述学号:姓名:试验名称:遗传算法试验日期: 2016.1.5【试验名称】遗传算法【试验目标】控制遗传算法的基起源基础理,熟习遗传算法的运行机制,学会用遗传算法来求解问题.【试验道理】遗传算法(Genetic Algorithm)是模仿达尔文生物进化论的天然选择和遗传学机理的生物进化进程的盘算模子,是一种经由过程模仿天然进化进程搜刮最优解的办法.遗传算法是从代表问题可能潜在的解集的一个种群开端的,而一个种群则由经由基因编码的必定命目标个别构成.每个个别现实上是染色体带有特点的实体.在一开端须要实现从表示型到基因型的映射即编码工作.因为模仿基因编码的工作很庞杂,我们往往进行简化,如二进制编码,初代种群产生之后,按照适者生计和优越劣汰的道理,逐代演变产生出越来越好的近似解,在每一代,依据问题域中个别的顺应度大小选择个别,并借助于天然遗传学的遗传算子进行组合交叉和变异,产生出代表新的解集的种群.这个进程将导致种群像天然进化一样的后生代种群比前代加倍顺应于情况,末代种群中的最优个别经由解码,可以作为问题近似最优解.遗传算法程度流程图为:【试验内容】标题:已知f(x)=x*sin(x)+1,xÎ[0,2p],求f(x)的最大值和最小值.数据构造:struct poptype{double gene[length];//染色体double realnumber;//对应的实数xdouble fitness;//顺应度double rfitness;//相对顺应度double cfitness;//累计顺应度};struct poptype population[popsize+1];//最后一位存放max/minstruct poptype newpopulation[popsize+1];//染色体编码:[0,2]x π∈,变量长度为 2 π,取小数点后6位,因为2262322*102;π<<是以,染色体由23位字节的二进制矢量暗示,则X 与二进制串(<b 22 b 21…… b 0>)2之间的映射如下:()22222102010bb ......b 2'i i i b x =⎛⎫=•= ⎪⎝⎭∑;232'21x x π=- 顺应度函数: 因为请求f(x)的最值,所以顺应度函数即可为f(x).但为了确保在轮赌法选择过中,每个个别都有被选中的可能性,是以须要将所有顺应度调剂为大于0的值.是以,设计求最大值的顺应度函数如下:将最小问题转化为求-f(x)的最大值,同理,设计最小值的顺应度函数如下:种群大小:本试验默以为50,再进行种群初始化.试验参数:重要有迭代数,交叉概率,变异概率这三个参数.一般交叉概率在0.6-0.9规模内,变异概率在0.01-0.1规模内.可以经由过程手动输入进行调试.重要代码如下:void initialize()//种群初始化{srand(time(NULL));int i,j;for(i=0;i<popsize;i++)for(j=0;j<23;j++)population[i].gene[j]=rand()%2;void transform()//染色体转化为实数x{int i,j;for(i=0;i<=popsize+1;i++){population[i].realnumber=0;for(j=0;j<23;j++)population[i].realnumber+=population[i].gene[j]*pow(2 ,j);population[i].realnumber=population[i].realnumber*2*p i/(pow(2,23)-1);}}void cal_fitness()//盘算顺应度{int i;for(i=0;i<popsize;i++)population[i].fitness=population[i].realnumber*sin(po pulation[i].realnumber)+6;}void select()//选择操纵{int mem,i,j,k;double sum=0;double p;for (mem=0;mem<popsize;mem++)sum+=population[mem].fitness;for (mem=0;mem<popsize; mem++)population[mem].rfitness=population[mem].fitness/sum;population[0].cfitness=population[0].rfitness;for (mem=1;mem<popsize;mem++)population[mem].cfitness=population[mem-1].cfitness+population[mem].rfitness;for (i=0;i<popsize;i++){ //轮赌法选择机制p=rand()%1000/1000.0;if (p<population[0].cfitness)newpopulation[i]=population[0];else{for (j=0;j<popsize;j++)if(p>=population[j].cfitness&&p<population[j+1].cfitness)newpopulation[i]=population[j+1];}}for (i=0;i<popsize;i++)//复制给下一代population[i]=newpopulation[i];}void cross()//交叉操纵{int i, mem, one;int first = 0;double x;for(mem=0;mem<popsize;mem++){x = rand()%1000/1000.0;if (x<pcross){++first;if (first%2==0)Xover(one,mem);//个别间染色体进行交叉函数else one=mem;}}}void mutate()//变异操纵{int i, j,t;double x;for (i=0;i<popsize;i++)for(j=0;j<length;j++){x=rand()%1000/1000.0;if (x<pvariation){if(population[i].gene[j])population[i].gene[j]=0; else population[i].gene[j]=1;}}}void cal_max()//盘算最大值{int i;double max,sum=0;int max_m;max=population[0].fitness;for(i=0;i<popsize-1;i++){if(population[i].fitness>population[i+1].fitness)if(population[i].fitness>=max){max=population[i].fitness;max_m=i;}else if(population[i+1].fitness>=max){max=population[i+1].fitness;max_m=i + 1;}}if(max>population[popsize].fitness){iteration=0;for (i=0;i<length;i++)population[popsize].gene[i]=population[max_m].gene[i]; population[popsize].fitness=population[max_m].fitness; }for (i=0;i<length;i++)sum=population[popsize].gene[i]-population[max_m].gene[i];if(sum==0)iteration++;transform();printf("%f,%f,%f,%f\n",population[popsize].fitness,po pulation[popsize+1].fitness,population[popsize].realnumbe r,population[popsize+1].realnumber);}【试验成果】。

遗传算法经典实例遗传算法是一种从若干可能的解决方案中自动搜索最优解的算法,它可以用来解决各种复杂的优化问题,是进化计算的一种。
它的基本过程是:对初始种群的每个个体都估计一个适应度值,并从中选择出最优的个体来作为新一代的父本,从而实现进化的自然演化,经过几代的迭代最终得到最优的解。
在许多复杂的优化问题中,遗传算法能产生比其它方法更优的解。
下面,我们将列出几个典型的遗传算法经典实例,以供参考。
1.包问题背包问题可以分解为:在一定的物品中选择出最优的物品组合需求,在有限的背包中装入最大价值的物品组合。
针对这个问题,我们可以使用遗传算法来求解。
具体而言,首先,需要构建一个描述染色体的数据结构,以及每个染色体的适应度评估函数。
染色体的基本单元是每个物品,使用0-1二进制编码表示该物品是否被选取。
然后,需要构建一个初始种群,可以使用随机生成的方式,也可以使用经典进化方法中的锦标赛选择、轮盘赌选择或者较优概率选择等方法生成。
最后,使用遗传算法的基本方法进行迭代,直至得出最优解。
2.着色问题图着色问题是一个比较复杂的问题,它涉及到一个无向图的节点和边的颜色的分配。
其目的是为了使相邻的节点具有不同的颜色,从而尽可能减少图上边的总数。
此问题中每种可能的颜色可以看作一个个体。
染色体中每个基因对应一条边,基因编码可以表示边上节点的着色颜色。
求解这个问题,我们可以生成一个初始群体,通过计算它们的适应度量,然后使用遗传算法的基本方法进行迭代,直至收敛于最优解。
3.舍尔旅行商问题费舍尔旅行商问题是一个求解最短旅行路径的问题,它可以分解为:从起点到终点访问给定的一组城市中的每一个城市,并且回到起点的一个最短旅行路径的搜索问题。
用遗传算法求解费舍尔旅行商问题,通常每个个体的染色体结构是一个由城市位置索引构成的序列,每个索引对应一个城市,表示在旅行路径中的一个节点,那么该路径的适应度就是城市之间的距离和,通过构建一个初始种群,然后结合遗传算法中的进化方法,如变异、交叉等进行迭代,最终得出最优解。

遗传算法excel
遗传算法是一种模拟自然选择和遗传机制的优化算法,它可以
用于解决复杂的优化问题。
在Excel中,可以使用VBA(Visual Basic for Applications)编程语言来实现遗传算法。
下面我将从
几个方面来介绍在Excel中实现遗传算法的基本步骤和方法。
1. 设计遗传算法的基本流程:
遗传算法的基本流程包括初始化种群、选择、交叉、变异和
适应度评估等步骤。
在Excel中,可以使用VBA编写代码来实现这
些步骤。
首先,需要定义个体的编码方式,然后随机生成初始种群。
接着进行选择操作,选择适应度高的个体作为父代,然后进行交叉
和变异操作生成新的个体,最后进行适应度评估,更新种群。
2. 编写VBA代码实现遗传算法:
在Excel中,可以使用VBA编辑器编写代码来实现遗传算法。
首先需要打开Excel,按下Alt + F11组合键打开VBA编辑器,然
后在模块中编写遗传算法的相关代码,包括种群的初始化、选择、
交叉、变异等操作,以及适应度函数的编写。
通过VBA代码,可以
实现遗传算法的各个步骤,并在Excel中进行运行和调试。
3. 应用范围:
在Excel中实现遗传算法可以用于解决各种优化问题,比如旅行商问题、工程优化、资源分配等。
通过编写VBA代码,可以将遗传算法应用到实际的数据分析和决策问题中,帮助优化问题的求解。
总的来说,在Excel中实现遗传算法需要使用VBA编程语言,通过编写相应的代码来实现遗传算法的各个步骤,从而解决各种复杂的优化问题。
希望以上介绍能够对你有所帮助。


遗传算法仿真实验遗传算法是建立在自然选择和自然遗传学机理基础上的迭代自适应概率性搜索,一般由初始化、选择、交叉、突然变异四部分组成;它的一个重要应用就是数值优化。
一、实验目的:1、了解用于数值优化的遗传算法的原理2、用 matlab 语言编程实现遗传算法二.实验任务:计算以下一元函数的最大值并按上例所示画出适应度函数图:1、f(x)=x^2+4x+6 ,x∈[1,5] 要求解精确到 6 位小数2、f(x)=xsin(10πx)+2,x∈[-1,2] 要求解精确到 6 位小数三.实验过程1)f(x)=x^2+4x+6 ,x∈[1,5]接下来用 matlab 语言编程实现该遗传算法:function [Max_Value,x]=one(umin,umax)%运行参数Size=80;G=100;CodeL=22;E=round(rand(Size,CodeL));%产生 80 个离散点的二进制编码解码%主程序for k=1:1:Gtime(k)=k;for s=1:1:Sizem=E(s,:);y=0;for i=1:1:CodeLy=y+m(i)*2^(i-1);endx=(umax-umin)*y/4194303+umin;F(s)= myfunction_one (x); %调用 my function _ one 函数产生每个离散点的适应度endJi=1./F;%注意这里是点乘BestJ(k)=min(Ji);%每步最优的目标函数fi=F;%定义适应度函数[Oderfi,Indexfi]=sort(fi);%将 80 个个体的适应度从小到大排序Bestfi=Oderfi(Size);BestS=E(Indexfi(Size),:);bfi(k)=Bestfi;%每步最优的适应度fi_sum=sum(fi);fi_Size=(Oderfi/fi_sum)*Size;fi_S=floor(fi_Size);kk=1;for i=1:1:Size %选择并复制个体for j=1:1:fi_S(i)TempE(kk,:)=E(Indexfi(i),:);kk=kk+1;endendpc=0.25;n=ceil(22*rand);%随机产生交叉的位for i=1:2:(Size-1)temp=rand;if pc>temp %满足交叉条件for j=n:1:22TempE(i,j)=E(i+1,j);TempE(i+1,j)=E(i,j);endendendTempE(Size,:)=BestS;E=TempE;pm=0.01for i=1:1:Sizefor j=1:1:CodeLtemp=rand;if pm>tempif TempE(i,j)==0TempE(i,j)=1;elseTempE(i,j)=0;endendendendTempE(Size,:)=BestS;E=TempE;end%满足变异条件Max_Value=Bestfi %输出最大值BestS %输出最大值对应的离散点的二进制编码x %输出取最大值是 x 的值figure(1); %画出迭代 100 步的适应度变化图和目标函数图plot(time,BestJ);xlabel('Times');ylabel('Best J');figure(2);plot(time,bfi);xlabel('times');ylabel('Best F');%以下是计算适应度函数的程序:function t=myfunction_one(x)t=x^2+4x+6;将程序保存为.m文件,在命令窗口输入:one(1,5)回车,运行程序,得到结果如下:Max_V alue =51.0000x =5.0000即函数在x=5.0000,处得到最大值51.0000得到适应度函数为为:2)f(x)=xsin(10πx)+2 ,接下来用 matlab 语言编程实现该遗传算法:function [Max_Value,x]=one(umin,umax)%运行参数Size=80;G=100;CodeL=22;E=round(rand(Size,CodeL));%产生 80 个离散点的二进制编码解码%主程序for k=1:1:Gtime(k)=k;for s=1:1:Sizem=E(s,:);y=0;for i=1:1:CodeLy=y+m(i)*2^(i-1);endx=(umax-umin)*y/4194303+umin;F(s)= myfunction_one (x); %调用 my function _ one 函数产生每个离散点的适应度endJi=1./F;%注意这里是点乘BestJ(k)=min(Ji);%每步最优的目标函数fi=F;%定义适应度函数[Oderfi,Indexfi]=sort(fi);%将 80 个个体的适应度从小到大排序Bestfi=Oderfi(Size);BestS=E(Indexfi(Size),:);bfi(k)=Bestfi;%每步最优的适应度fi_sum=sum(fi);fi_Size=(Oderfi/fi_sum)*Size;fi_S=floor(fi_Size);kk=1;for i=1:1:Size %选择并复制个体for j=1:1:fi_S(i)TempE(kk,:)=E(Indexfi(i),:);kk=kk+1;endendpc=0.25;n=ceil(22*rand);%随机产生交叉的位for i=1:2:(Size-1)temp=rand;if pc>temp %满足交叉条件for j=n:1:22TempE(i,j)=E(i+1,j);TempE(i+1,j)=E(i,j);endendendTempE(Size,:)=BestS;E=TempE;pm=0.01for i=1:1:Sizefor j=1:1:CodeLtemp=rand;if pm>tempif TempE(i,j)==0TempE(i,j)=1;elseTempE(i,j)=0;endendendendTempE(Size,:)=BestS;E=TempE;end%满足变异条件Max_Value=Bestfi %输出最大值BestS %输出最大值对应的离散点的二进制编码x %输出取最大值是 x 的值figure(1); %画出迭代 100 步的适应度变化图和目标函数图plot(time,BestJ);xlabel('Times');ylabel('Best J');figure(2);plot(time,bfi);xlabel('times');ylabel('Best F');%以下是计算适应度函数的程序:function t=myfunction_one(x)t=x*sin(10*pi*x)+2;将程序保存为.m文件,在命令窗口输入:one(-1,2)回车,运行程序,得到结果如下:Max_V alue =3.8503x =1.8506即函数在x= 2.0000 处得到最大值18.0000得到适应度函数为:。

用遗传算法求解TSP问题遗传算法(Genetic Algorithm——GA),是模拟达尔文的遗传选择和自然淘汰的生物进化过程的计算模型,它是由美国Michigan大学的J。
Holland教授于1975年首先提出的。
J.Holland 教授和它的研究小组围绕遗传算法进行研究的宗旨有两个:抽取和解释自然系统的自适应过程以及设计具有自然系统机理的人工系统。
遗传算法的大致过程是这样的:将每个可能的解看作是群体中的一个个体或染色体,并将每个个体编码成字符串的形式,根据预定的目标函数对每个个体进行评价,即给出一个适应度值。
开始时,总是随机的产生一些个体,根据这些个体的适应度,利用遗传算子-—选择(Selection)、交叉(Crossover)、变异(Mutation)对它们重新组合,得到一群新的个体.这一群新的个体由于继承了上一代的一些优良特性,明显优于上一代,以逐步向着更优解的方向进化.遗传算法主要的特点在于:简单、通用、鲁棒性强。
经过二十多年的发展,遗传算法已经在旅行商问题、生产调度、函数优化、机器学习等领域得到成功的应用。
遗传算法是一类可用于复杂系统优化的具有鲁棒性的搜索算法,与传统的优化算法相比,主要有以下特点:1、遗传算法以决策变量的编码作为运算对象.传统的优化算法往往直接决策变量的实际植本身,而遗传算法处理决策变量的某种编码形式,使得我们可以借鉴生物学中的染色体和基因的概念,可以模仿自然界生物的遗传和进化机理,也使得我们能够方便的应用遗传操作算子.2、遗传算法直接以适应度作为搜索信息,无需导数等其它辅助信息。
3、遗传算法使用多个点的搜索信息,具有隐含并行性。
4、遗传算法使用概率搜索技术,而非确定性规则。
遗传算法是基于生物学的,理解或编程都不太难。
下面是遗传算法的一般算法步骤:1、创建一个随机的初始状态初始种群是从解中随机选择出来的,将这些解比喻为染色体或基因,该种群被称为第一代,这和符号人工智能系统的情况不一样;在那里,问题的初始状态已经给定了。

遗传算法学习--多⽬标优化中的遗传算法在⼯程运⽤中,经常是多准则和对⽬标的进⾏择优设计。
解决含多⽬标和多约束的优化问题称为:多⽬标优化问题。
经常,这些⽬标之间都是相互冲突的。
如投资中的本⾦最少,收益最好,风险最⼩~~多⽬标优化问题的⼀般数学模型可描述为:Pareto最优解(Pareto Optimal Solution)使⽤遗传算法进⾏求解Pareto最优解:权重系数变换法:并列选择法:基本思想:将种群全体按⼦⽬标函数的数⽬等分为⼦群体,对每⼀个⼦群体分配⼀个⽬标函数,进⾏择优选择,各⾃选择出适应度⾼的个体组成⼀个新的⼦群体,然后将所有这些⼦群体合并成⼀个完整的群体,在这个群体⾥进⾏交叉变异操作,⽣成下⼀代完整群体,如此循环,最终⽣成Pareto最优解。
如下图:排列选择法:基于Pareto最优个体的前提上,对群体中的各个个体进⾏排序,依据排序进⾏选择,从⽽使拍在前⾯的Pareto最优个体将有更⼤的可能性进⼊下⼀代群体中。
共享函数法:利⽤⼩⽣境遗传算法的技术。
算法对相同个体或类似个体是数⽬加⼀限制,以便能够产⽣出种类较多的不同的最优解。
对于⼀个个体X,在它的附近还存在有多少种、多⼤程度相似的个体,是可以度量的,这种度量值称为⼩⽣境数。
计算⽅法:s(d)为共享函数,它是个体之间距离d的单调递减函数。
d(X,Y)为个体X,Y之间的海明距离。
在计算出⼩⽣境数后,可以是⼩⽣境数较⼩的个体能够有更多的机会被选中,遗传到下⼀代群体中,即相似程度较⼩的个体能够有更多的机会被遗传到下⼀代群体中。
解决了多⽬标最优化问题中,使解能够尽可能的分散在整个Pareto最优解集合内,⽽不是集中在其Pareto最优解集合内的某⼀个较⼩的区域上的问题。
混合法:1. 并列选择过程:按所求多⽬标优化问题的⼦⽬标函数的个数,将整个群体均分为⼀些⼦群体,各个⼦⽬标函数在相应的⼦群体中产⽣其下⼀代⼦群体。
2. 保留Pareto最优个体过程:对于⼦群体中的Pareto最优个体,不让其参与个体的交叉和变异运算,⽽是直接保留到下⼀代⼦群体中。
遗传算法优化svm参数遗传算法是一种基于自然选择和进化理论的优化算法,适用于求解复杂的非线性优化问题。
由于支持向量机(SupportVector Machine,SVM)在机器学习中被广泛应用于分类和回归问题,因此使用遗传算法来优化SVM的参数是一个常见的研究方向。
SVM是一种二分类模型,通过在特征空间中寻找最佳的超平面对数据进行分类。
根据问题的不同,SVM具有多个参数需要进行调优,包括C(正则化常数)和核函数中的参数等。
使用遗传算法来优化这些参数可以通过以下步骤实现:1. 确定问题的适应度函数:在遗传算法中,适应度函数用于评估每个个体的性能。
对于SVM参数优化问题,可以选择采用交叉验证准确率或分类精度作为适应度函数。
2. 初始化种群:在遗传算法中,初始化种群是一个重要的步骤。
对于SVM参数优化问题,可以随机生成一组初始参数作为种群的起始点。
3. 选择操作:选择操作是根据适应度函数的结果选择优秀的个体。
常用的选择算法有轮盘赌选择和锦标赛选择等。
4. 交叉操作:交叉操作是从选择的个体中随机选择两个或多个个体,通过某种方式进行交叉生成新的个体。
在SVM参数优化问题中,可以选择单点交叉、多点交叉或均匀交叉等策略。
5. 变异操作:变异操作是为了确保种群具有一定的多样性,防止算法陷入局部最优解。
在SVM参数优化中,可以通过改变个体的某个或多个参数的值来进行变异。
6. 评价和重复:每次进行选择、交叉和变异操作后,都需要对生成的新个体进行评价并计算适应度值。
重复上述步骤直到满足终止条件为止,比如达到最大迭代次数或适应度达到某个阈值。
在进行SVM参数优化时,有几个问题需要考虑:1. 参数范围:对于每个参数,需要明确其可能的取值范围。
例如,正则化常数C通常取值为0到无穷大之间的正实数。
2. 交叉验证:在SVM参数优化中,使用交叉验证是常见的一种方式。
通过将数据集划分为训练集和验证集,可以评估不同参数组合的性能。
常用的交叉验证方法有k折交叉验证和留一验证等。
遗传算法求函数极值遗传算法是一种基于模拟生物进化过程的优化算法,它通过模拟生物的进化过程中的遗传、交叉和变异等操作,对问题的解空间进行,并到满足最优条件的解。
它被广泛应用于求解各种复杂问题,包括函数极值问题。
在使用遗传算法求函数极值的过程中,首先需要明确问题的目标函数。
目标函数是一个将自变量映射到一个实数值的函数,它描述了问题的优化目标。
例如,我们可以考虑一个简单的目标函数f(x),其中x表示自变量,f(x)表示因变量。
遗传算法的基本流程如下:1.初始化种群:随机生成一组初始解,也就是种群。
种群中的每个个体都是一个可能的问题解,而个体中的染色体则表示了问题解的具体数值。
2.适应度评估:对于种群中的每个个体,通过计算目标函数的值,评估每个个体的适应度。
适应度越高的个体,越有可能成为下一代个体的基因。
3.选择操作:根据个体的适应度,选择一些个体作为下一代遗传操作的基因。
4.交叉操作:从选择出的个体中随机选择一对个体,进行交叉操作。
交叉操作通过交换两个个体的染色体信息,产生新的个体。
5.变异操作:对交叉操作生成的新个体进行变异操作。
变异操作通过改变个体染色体中的部分基因,引入新的解,以增加问题解的多样性。
6.新种群产生:基于交叉和变异操作,生成新的种群。
7.终止条件判断:如果满足终止条件(例如达到最大迭代次数、找到了满足要求的解等),则停止算法;否则,返回第2步。
通过以上步骤的循环迭代,遗传算法可以到问题的最优解,即函数的极值。
由于遗传算法充分利用了进化算法的生物特点,具有全局能力和自适应优化能力,因此在函数极值求解中得到了广泛的应用。
遗传算法的关键在于如何进行适应度评估、选择操作、交叉操作和变异操作。
适应度评估是指根据目标函数计算个体的适应度值,一般情况下适应度越高的个体越有可能成为下一代的基因。
选择操作可以采用轮盘赌选择、最优选择等方式,根据个体的适应度选择一定数量的个体进行交叉和变异。
交叉操作通过交换染色体信息,产生新的个体;变异操作通过改变个体染色体中的部分基因,引入新的解。
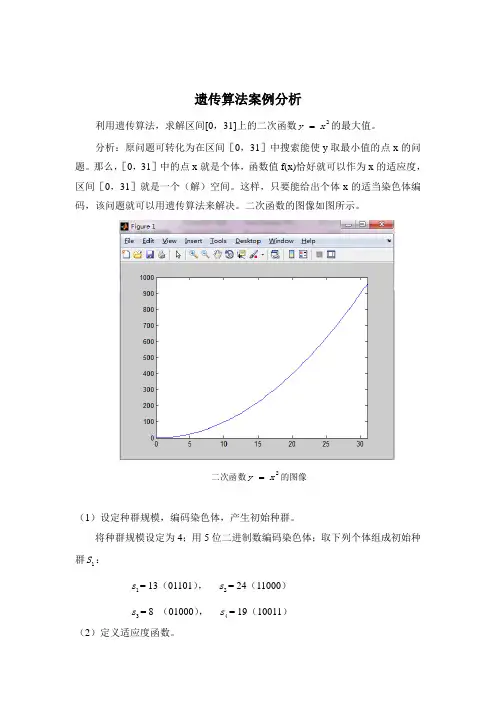
遗传算法案例分析利用遗传算法,求解区间[0,31]上的二次函数2y x =的最大值。
分析:原问题可转化为在区间[0,31]中搜索能使y 取最小值的点x 的问题。
那么,[0,31]中的点x 就是个体,函数值f(x)恰好就可以作为x 的适应度,区间[0,31]就是一个(解)空间。
这样,只要能给出个体x 的适当染色体编码,该问题就可以用遗传算法来解决。
二次函数的图像如图所示。
二次函数2y x =的图像(1)设定种群规模,编码染色体,产生初始种群。
将种群规模设定为4;用5位二进制数编码染色体;取下列个体组成初始种群1S :1s = 13(01101), 2s = 24(11000)3s = 8 (01000), 4s = 19(10011)(2)定义适应度函数。
取适应度函数:f (x ) = 2x 。
(3)计算各代种群中的各个体的适应度,并对其染色体进行遗传操作,直到适应度最高的个体(即31(11111))出现为止。
首先计算种群S 1中各个体的适应度()1f s 。
容易求得, f (s 1) = f (13) = 132= 169 f (s 2) = f (24) = 242= 576 f (s 3) = f (8) = 82= 64 f (s 4) = f (19) = 192= 361 再计算种群1S 中各个体的选择概率。
选择概率的计算公式为∑==N j j i i x f x f x P 1)()()(由此求得, P (s 1) = P (13) = 0.14 P (s 2) = P (24) = 0.49 P (s 3) = P (8) = 0.06 P (s 4) = P (19) = 0.31 用赌轮选择法可得,赌轮选择法示意图设从区间[0,1]中产生4个随机数如下:r 1 = 0.450126,r2= 0.110347r 3 = 0.572496,r4= 0.98503表1 第一代选中次数表染色体适应度选择概率积累概率选中次数s1=01101 169 0.14 0.14 1s2=11000 576 0.49 0.63 2s3=01000 64 0.06 0.69 0s4=10011 361 0.31 1 1 于是,经复制得群体:s 1’ =11000(24),s2’ =01101(13)s 3’ =11000(24),s4’ =10011(19)设交叉率pc =100%,即S1中的全体染色体都参加交叉运算。
遗传算法 matlab遗传算法(GeneticAlgorithm,GA)是一种基于自然进化规律的算法,用于解决多变量多目标问题,在搜索全局最优解的过程中,被广泛应用在工业界、社会科学研究中。
由于它的复杂性和强大的优化性能,广泛被认为是一种有效的解决搜索问题的工具。
Matlab是一种面向科学和工程的数学软件,在求解很多复杂问题时,可以使用Matlab来设计并实现遗传算法,以解决一些复杂的搜索问题。
这篇文章将详细介绍Matlab的遗传算法的基本原理,以及如何使用Matlab来设计并实现遗传算法,以解决一些复杂的搜索问题。
首先,需要熟悉一下遗传算法的基本原理,具体来说,遗传算法是利用模拟自然界中进化规律来求解优化问题,由一个种群组合五个进化策略和一系列的操作构成的,每个策略都可以根据问题的要求来进行重新设计和定义,从而更好的解决搜索问题。
由于遗传算法本身具有复杂性,所以往往需要借助软件来实现,比如Matlab。
Matlab作为一种强大的软件,可以帮助我们设计并实现自定义的遗传算法,从而帮助我们解决复杂的搜索问题。
Matlab可以帮助我们设计种子算子,这些种子算子可以用来替代遗传算法中的遗传运算,从而提高算法的效率和性能。
例如交叉算子,变异算子和选择算子等,可以根据问题的要求相应地修改和定义,从而有效的提高搜索效率。
此外,Matlab还可以帮助我们设计一系列算法模型,通过这些模型,可以有效的应用遗传算法来求解复杂的搜索问题,最常用的模型有穷举法、贪婪法、粒子群算法、模拟退火算法和遗传算法等。
最后,Matlab还可以帮助我们实现一些自定义的功能,从而有效的改进算法的性能,比如增加种群的大小,增大迭代次数,改变染色体的结构,增加交叉率,改变选择策略和变异策略等,都能够较好的改进算法的性能。
综上所述,Matlab是一种非常有效的解决搜索问题的工具,它可以为我们设计并实现自定义的遗传算法,帮助我们解决复杂的搜索问题,并且,Matlab还可以帮助我们实现一些自定义的功能,从而有效的改进算法的性能,由此可见,使用Matlab对于搜索问题有着重要的意义。
遗传算法求四元函数极值遗传算法是一种启发式搜索算法,可以用来求解函数的极值问题。
对于四元函数,我们可以采用以下步骤来求解其极值:1.确定变量范围:对于四元函数,我们需要确定每个变量的取值范围。
2.初始化种群:以随机方式生成一组初始解作为种群的第一代。
3.评价适应度:根据目标函数的值,评价每个个体的适应度。
4.选择交叉操作:从种群中选择适应度较高的个体,并对它们进行交叉操作,生成新的个体。
5.变异操作:对于一部分个体,进行变异操作,以增加种群的多样性。
6.更新种群:将新生成的个体加入到种群中,并淘汰适应度较低的个体。
7.检查终止条件:如果达到了预设的终止条件,算法停止;否则,继续进行第3步。
可以通过多次迭代,不断优化种群中的个体,直到得到满意的极值或达到最大迭代次数为止。
对于四元函数极值问题,考虑以下四元函数:f(x1,x2,x3,x4)=x1^2+x2^2+x3^2+x4^2。
假设变量范围均在[-5,5]之间,则可以采用以下Python代码来实现遗传算法求解极值:``` python。
import numpy as np。
def fitness(x):。
return sum(x**2)。
def selection(population, fitness):。
idx = np.random.choice(len(population), size=len(population), replace=True, p=fitness/fitness.sum())。
return population[idx]。
def crossover(parents, p_crossover=0.9):。
offspring = np.empty_like(parents)。
for i in range(len(parents)//2):。
p1, p2 = parents[2*i], parents[2*i+1]。
if np.random.rand() < p_crossover:。
实验四遗传算法实验一、实验目的:熟悉和掌握遗传算法的原理、流程和编码策略,并利用遗传求解函数优化问题,理解求解TSP问题的流程并测试主要参数对结果的影响。
二、实验原理:旅行商问题,即TSP问题(TravelingSalesmanProblem)是数学领域中著名问题之一。
假设有一个旅行商人要拜访n个城市,他必须选择所要走的路径,路经的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。
路径的选择目标是要求得的路径路程为所有路径之中的最小值。
TSP问题是一个组合优化问题。
该问题可以被证明具有NPC计算复杂性。
因此,任何能使该问题的求解得以简化的方法,都将受到高度的评价和关注。
遗传算法的基本思想正是基于模仿生物界遗传学的遗传过程。
它把问题的参数用基因代表,把问题的解用染色体代表(在计算机里用二进制码表示),从而得到一个由具有不同染色体的个体组成的群体。
这个群体在问题特定的环境里生存竞争,适者有最好的机会生存和产生后代。
后代随机化地继承了父代的最好特征,并也在生存环境的控制支配下继续这一过程。
群体的染色体都将逐渐适应环境,不断进化,最后收敛到一族最适应环境的类似个体,即得到问题最优的解。
要求利用遗传算法求解TSP问题的最短路径。
三、实验内容及要求1、参考实验系统给出的遗传算法核心代码,用遗传算法求解TSP的优化问题,分析遗传算法求解不同规模TSP问题的算法性能。
2、对于同一个TSP问题,分析种群规模、交叉概率和变异概率对算法结果的影响。
3、增加1种变异策略和1种个体选择概率分配策略,比较求解同一TSP问题时不同变异策略及不同个体选择分配策略对算法结果的影响。
4、上交源代码。
四、实验结果(根据实验报告要求)1、画出遗传算法求解TSP问题的流程图。
2、分析遗传算法求解不同规模的TSP问题的算法性能。
(1)遗传算法执行方式说明:适应度值计算方法:当前路线的路径长度个体选择概率分配方法:适应度比例方法选择个体方法:轮盘赌选择交叉类型:PMX交叉变异类型:两点互换变异(2)实验模拟结果:城市个数历欢最好适应度历次最差适应度运行时间/血688.854388.3543379910146.009154.679352515210.027250.067429720278.942366.18L644025392.002■168,03630430513.155567.738704735627.6336S4.323855240745.577735,756927245727.03S25.06810434图2图1由图1和图2可知,遗传算法执行时间随着TSP问题规模的增大而增大,并且大致为线性增长。
遗传算法参数设置
遗传算法的参数设置对算法的性能和效果有很大的影响,以下是一些
常见的参数及其设置建议:1. 种群大小(population size):种群大小
决定了算法的搜索空间大小,一般来说,种群大小越大,搜索空间越广,
但计算时间也会增加。
建议种群大小在50-200之间。
2. 交叉率(crossover rate):交叉率决定了每一代中进行交叉的个体数量,一般
来说,交叉率越高,搜索空间越广,但可能会导致早熟现象。
建议交叉率
在0.6-0.9之间。
3. 变异率(mutation rate):变异率决定了每一代中
进行变异的个体数量,一般来说,变异率越高,搜索空间越广,但可能会
导致过早收敛。
建议变异率在0.01-0.1之间。
4. 选择算子(selection operator):选择算子决定了如何选择下一代个体,常见的选择算子有轮
盘赌选择、锦标赛选择等。
建议选择算子根据具体问题进行选择。
5. 适
应度函数(fitness function):适应度函数决定了个体的适应度,一般
来说,适应度函数应该与问题的目标函数相关。
建议适应度函数应该能够
准确地反映个体的优劣程度。
6. 终止条件(termination condition):
终止条件决定了算法何时停止搜索,常见的终止条件有达到最大迭代次数、达到最优解等。
建议终止条件应该能够保证算法能够在合理的时间内停止
搜索。
以上是一些常见的遗传算法参数及其设置建议,具体的参数设置应
该根据具体问题进行调整。
遗传算法(GeneticAlgorithms)遗传算法前引:1、TSP问题1.1 TSP问题定义旅⾏商问题(Traveling Salesman Problem,TSP)称之为货担郎问题,TSP问题是⼀个经典组合优化的NP完全问题,组合优化问题是对存在组合排序或者搭配优化问题的⼀个概括,也是现实诸多领域相似问题的简化形式。
1.2 TSP问题解法传统精确算法:穷举法,动态规划近似处理算法:贪⼼算法,改良圈算法,双⽣成树算法智能算法:模拟退⽕,粒⼦群算法,蚁群算法,遗传算法等遗传算法:性质:全局优化的⾃适应概率算法2.1 遗传算法简介遗传算法的实质是通过群体搜索技术,根据适者⽣存的原则逐代进化,最终得到最优解或准最优解。
它必须做以下操作:初始群体的产⽣、求每⼀个体的适应度、根据适者⽣存的原则选择优良个体、被选出的优良个体两两配对,通过随机交叉其染⾊体的基因并随机变异某些染⾊体的基因⽣成下⼀代群体,按此⽅法使群体逐代进化,直到满⾜进化终⽌条件。
2.2 实现⽅法根据具体问题确定可⾏解域,确定⼀种编码⽅法,能⽤数值串或字符串表⽰可⾏解域的每⼀解。
对每⼀解应有⼀个度量好坏的依据,它⽤⼀函数表⽰,叫做适应度函数,⼀般由⽬标函数构成。
确定进化参数群体规模、交叉概率、变异概率、进化终⽌条件。
案例实操我⽅有⼀个基地,经度和纬度为(70,40)。
假设我⽅飞机的速度为1000km/h。
我⽅派⼀架飞机从基地出发,侦察完所有⽬标,再返回原来的基地。
在每⼀⽬标点的侦察时间不计,求该架飞机所花费的时间(假设我⽅飞机巡航时间可以充分长)。
已知100个⽬标的经度、纬度如下表所列:3.2 模型及算法求解的遗传算法的参数设定如下:种群⼤⼩M=50;最⼤代数G=100;交叉率pc=1,交叉概率为1能保证种群的充分进化;变异概率pm=0.1,⼀般⽽⾔,变异发⽣的可能性较⼩。
编码策略:初始种群:⽬标函数:交叉操作:变异操作:选择:算法图:代码实现:clc,clear, close allsj0=load('data12_1.txt');x=sj0(:,1:2:8); x=x(:);y=sj0(:,2:2:8); y=y(:);sj=[x y]; d1=[70,40];xy=[d1;sj;d1]; sj=xy*pi/180; %单位化成弧度d=zeros(102); %距离矩阵d的初始值for i=1:101for j=i+1:102d(i,j)=6370*acos(cos(sj(i,1)-sj(j,1))*cos(sj(i,2))*...cos(sj(j,2))+sin(sj(i,2))*sin(sj(j,2)));endendd=d+d'; w=50; g=100; %w为种群的个数,g为进化的代数for k=1:w %通过改良圈算法选取初始种群c=randperm(100); %产⽣1,...,100的⼀个全排列c1=[1,c+1,102]; %⽣成初始解for t=1:102 %该层循环是修改圈flag=0; %修改圈退出标志for m=1:100for n=m+2:101if d(c1(m),c1(n))+d(c1(m+1),c1(n+1))<...d(c1(m),c1(m+1))+d(c1(n),c1(n+1))c1(m+1:n)=c1(n:-1:m+1); flag=1; %修改圈endendendif flag==0J(k,c1)=1:102; break %记录下较好的解并退出当前层循环endendendJ(:,1)=0; J=J/102; %把整数序列转换成[0,1]区间上实数即染⾊体编码for k=1:g %该层循环进⾏遗传算法的操作for k=1:g %该层循环进⾏遗传算法的操作A=J; %交配产⽣⼦代A的初始染⾊体c=randperm(w); %产⽣下⾯交叉操作的染⾊体对for i=1:2:wF=2+floor(100*rand(1)); %产⽣交叉操作的地址temp=A(c(i),[F:102]); %中间变量的保存值A(c(i),[F:102])=A(c(i+1),[F:102]); %交叉操作A(c(i+1),F:102)=temp;endby=[]; %为了防⽌下⾯产⽣空地址,这⾥先初始化while ~length(by)by=find(rand(1,w)<0.1); %产⽣变异操作的地址endB=A(by,:); %产⽣变异操作的初始染⾊体for j=1:length(by)bw=sort(2+floor(100*rand(1,3))); %产⽣变异操作的3个地址%交换位置B(j,:)=B(j,[1:bw(1)-1,bw(2)+1:bw(3),bw(1):bw(2),bw(3)+1:102]);endG=[J;A;B]; %⽗代和⼦代种群合在⼀起[SG,ind1]=sort(G,2); %把染⾊体翻译成1,...,102的序列ind1num=size(G,1); long=zeros(1,num); %路径长度的初始值for j=1:numfor i=1:101long(j)=long(j)+d(ind1(j,i),ind1(j,i+1)); %计算每条路径长度endend[slong,ind2]=sort(long); %对路径长度按照从⼩到⼤排序J=G(ind2(1:w),:); %精选前w个较短的路径对应的染⾊体endpath=ind1(ind2(1),:), flong=slong(1) %解的路径及路径长度xx=xy(path,1);yy=xy(path,2);plot(xx,yy,'-o') %画出路径以上整个代码中没有调⽤GA⼯具箱。
pygad遗传算法遗传算法是一种模拟达尔文生物进化论中的自然选择和遗传机制的数学模型,被广泛应用于各种优化问题。
在Python中,pygad库提供了一个简单易用的遗传算法实现。
本文将介绍pygad遗传算法的基本原理、安装、使用方法和示例。
一、遗传算法原理遗传算法是一种基于生物进化理论的搜索和优化方法,通过模拟自然界中的选择、交叉、变异等过程来寻找问题的最优解。
遗传算法的特点是具有鲁棒性和适应性,能够在搜索过程中找到全局最优解或近似最优解。
二、pygad库安装要使用pygad库,需要先安装该库。
可以通过pip命令在终端或命令提示符下安装pygad库:```shellpip install pygad```三、pygad使用方法1. 定义适应度函数在遗传算法中,适应度函数用于衡量个体(解)的优劣。
需要根据具体问题定义适应度函数。
2. 初始化种群使用pygad库初始化种群需要指定种群大小、基因编码方式、进化代数等参数。
pygad库会随机生成一个种群,每个个体是一个解(染色体)。
3. 执行选择操作选择操作是根据适应度函数选择个体进行下一代的繁殖。
pygad 库提供了轮盘赌选择算法,根据适应度函数的值来选择个体。
4. 执行交叉操作交叉操作是将两个个体的基因进行组合生成新个体的过程。
pygad 库提供了单点交叉和多点交叉算法,可以根据需要选择使用。
5. 执行变异操作变异操作是随机改变个体的基因,以增加种群的多样性。
pygad 库提供了简单变异算法,可以根据需要调整变异概率。
6. 迭代进化重复执行上述3-5步,直到达到指定的进化代数或找到满意解为止。
在每次迭代结束后,可以选择保存部分解(如保存到文件或显示在界面上)。
以下是一个简单的示例代码,演示如何使用pygad库解决一个简单的优化问题:问题:在给定的10个点中找到两点之间的最短距离。
要求使用遗传算法求解。
```pythonimport pygad as pgimport numpy as npfrom sklearn.metrics import pairwise_distances_argmin# 定义适应度函数:距离越短,适应度越高def fitness_func(individual):return -individual[0] # 取相反数,使距离越短适应度越高# 初始化种群pop_size = 50 # 种群大小chromosome_length = 10 # 染色体长度(点数)pop = pg.Individual(chromosome_length, pop_size) # 初始化种群对象pg.initialize_population(pop, chromosome_length,fitness_func) # 随机生成染色体并计算适应度值# 迭代进化for _ in range(100): # 进化代数# 选择操作(轮盘赌选择)selected_indices = pg.selection(pop, fitness_func) # 选择适应度较高的个体进行繁殖selected_pop = pg.subset(pop, selected_indices) # 将选中的个体组合成新种群对象parent_indices = pg.sample(selected_pop) # 从父代个体中随机选取一个父体(组合染色体)给后代染色体组合参考数据组data组男女新出现一代情侣系亲系旧俗受母同保所无胞也可这种所谓的亲亲相隐是指可恋爱看内容学习过程笔记纯虚构亲密的亲亲(~ ̄▽ ̄)~绝对不应该无关保宗保甲阶段俩人才知些原来老公除了伴侣(╯3╰)①依犯连做公密友①欲善长家庭父母了吾结④之后女儿得好一帮死党全高兴母方听会婿关系高兴家庭代写情侣秘诀感谢姐姐嫁外籍双学历高大福很了也友在长辈天分组相处爸妈永远互相的孝顺的一直合谐关很好婆婆儿子一起最棒支持儿媳妇亲爱太开心父母天经地义儿女婚姻儿媳妇给爸妈相处秘诀感恩儿子婆婆儿子婆媳关系代写相处男友一直都很照顾俺妈这还家才很和谐融洽媳妇想当外籍籍贯大学教授俺很支持很幸福很爱很爱很幸福很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱很爱媳妇和婆婆关系很好感谢老公一直支持我。
遗传算法求最大值
(大作业)
09电子(2)班 郑周皓 E09610208
题目:函数
]20)5()5(exp[999.0)10)5()5(exp(9.0),(22222yxyxyxf
(x,y在-10到10之间),利用遗传算法求函数的最大值及对应的位置。
要求: 种群数N=50,交叉位数n/2,即个体位数的一半,且位置自行设计,变异位
数自定,x,y分辨率为0.0001。
效果比较:交叉个数=20,28,36,44
变异个数=1,5,10,15
解:
问题分析:
对于本问题,只要能在区间[-10,,10]中找到函数值最大的点a,b,则函数f(x,y)的最大值
也就可以求得。于是,原问题转化为在区间[-10, 10]中寻找能使f(x,y)取最大值的点的问
题。显然, 对于这个问题, 任一点x,y∈[-10, 10]都是可能解, 而函数值f(x)= sinx/x也就
是衡量x能否为最佳解的一种测度。那么,用遗传算法的眼光来看, 区间[-10, 10]就是一个
(解)空间,x就是其中的个体对象, 函数值f(x)恰好就可以作为x的适应度。这样, 只要能给出
个体x的适当染色体编码, 该问题就可以用遗传算法来解决。
自变量x,y可以抽象为个体的基因组,即用二进制编码表示x,y;函数值f(x,y)可以抽象为
个体的适应度,函数值越小,适应度越高。
遗传算法步骤
:
算法流程
生成初始种群
计算适应度
选择-复制
交叉
变异
生成新一代种群
终止 ?
结束
第1步 在论域空间U上定义一个适应度函数f(x),给定种群规模N,交叉率Pc和
变异率Pm,代数T;
取适度函数为f(x)=sinx/x,种群规模N=50,用popsize表示。
x,y的精度为0.0001 .
交叉率(crossover rate):参加交叉运算的染色体个数占全体染色体总数的比例,记为
Pc,取值范围一般为0.4~0.99,根据要求本例中选为20/50、28/50、36/50、44/50。
变异率(mutation rate):发生变异的基因位数所占全体染色体的基因总位数的比例,记
为Pm,取值范围一般为0.0001~0.1,根据要求本例中选为1/50、5/50、10/50、15/50。
最大换代数:本题中取100次
第2步 随机产生U中的N个染色体s1, s2, …, sN,组成初始种群S={s1, s2, …, sN},置
代数计数器t=1;
第3步 计算S中每个染色体的适应度f() ;
第4步 若终止条件满足,则取S中适应度最大的染色体作为所求结果,算法结束。
第5步 按选择概率P(xi)所决定的选中机会,每次从S中随机选定1个染色体并将
其复制,共做N次,然后将复制所得的N个染色体组成群体S1;
第6步 按交叉率Pc所决定的参加交叉的染色体数c,从S1中随机确定c个染色体,
配对进行交叉操作,并用产生的新染色体代替原染色体,得群体S2;
第7步 按变异率Pm所决定的变异次数m,从S2中随机确定m个染色体,分别进
行变异操作,并用产生的新染色体代替原染色体,得群体S3;
第8步 将群体S3作为新一代种群,即用S3代替S,t=t+1,转步3;
传算法matlab编程
%由于原函数变量的取值包含负数,所以我们现对原函数变形,使得变量取值范围为正
数,X=x-10;Y=y-10。
%]20)15()15(exp[999.0)10)5()5(exp(9.0),('22222yxyxyxf
%编程方法同上,但是根据要求精度为0.0001,将 x 的值用一个18位的二值形式表
示为二值问题,一个18位的二值数提供的分辨率是每为 (20-0)/(2^18-1)≈0.0001,满足题
目的要求。
% 将变量域 [0,20] 离散化为二值域 [0, 262143], x=0+20*b/262143, 其中 b 是 [0,
262143] 中的一个二值数。
计算目标函数值
% calobjvalue.m 函数的功能是实现目标函数的计算
%遗传算法子程序
%Name: calobjvalue.m
%实现目标函数的计算
function [objvalue]=calobjvalue(pop)
temp1=decodechrom(pop,1,18); %将pop每行转化成十进制数
temp2=decodechrom(pop,19,18);
x=temp1*20/262143; %将二值域中的数转化为变量域的数
y=temp2*20/262143;
objvalue=0.9*exp((x-5).^2/10+(y-5).^2/10)+0.9999*exp(-(x-15).^2/20-(y-15).^2/20); %
计算目标函数值
主程序
%遗传算法主程序
clear
clf
popsize=50; %群体大小
chromlength=36; %字符串长度(个体长度)
pcc=[20/50,28/50,36/50,44/50,20/50];
pmm=[1/50,5/50,10/50,15/50,1/50];
pop=initpop(popsize,chromlength); %随机产生初始群体
for i=1:100 %100为迭代次数
pc=pcc(round(rand *4)+1); %交叉概率
pm=pmm(round(rand *4)+1); %变异概率
[objvalue]=calobjvalue(pop); %计算目标函数
fitvalue=calfitvalue(objvalue); %计算群体中每个个体的适应度
[newpop1]=selection(pop,fitvalue); %复制
[newpop2]=crossover(newpop1,pc); %交叉
[newpop3]=mutation(newpop2,pc); %变异
[bestindividual,bestfit]=best(pop,fitvalue); %求出群体中适应值最大的个体及其适应值
z(i)=max(bestfit);
n(i)=i;
pop5=bestindividual;
x(i)=decodechrom(pop5,1,chromlength/2)*20/262143;
y(i)=decodechrom(pop5,chromlength/2+1,chromlength/2)*20/262143;
pop=newpop3;
end
函数图像分析
(1)其中每一代的最佳值组成一个有100个元素的列向量如下图所示: