用凯特摆测量重力加速度 实验目的:学习凯特摆的实验设计思想和技巧,掌握一种比较精确的测量重力加速度的方法。 实验原理:1、当摆幅很小时,刚体绕O轴摆动的周期: 刚体质量m,重心G到转轴O的距离h,绕O轴的转动惯量I,复 摆绕通过重心G的转轴的转动惯量为I G 。 当G轴与O轴平行时,有I=I G+mh2 ∴ ∴复摆的等效摆长l=( I G+mh2 )/mh 2、利用复摆的共轭性:在复摆重心G旁,存在两点O和O′,可使 该摆以O为悬点的摆动周期T?与以O′为悬点的摆动周期T?相同, 可证得|OO′|=l,可精确求得l。 3、对于凯特摆,两刀口间距就是l,可通过调节A、B、C、D四摆 锤得位置使正、倒悬挂时得摆动周期T?≈T?。 ∴4π2/g=(T?2+T?2)/2l + (T?2-T?2)/2(2h?-l) = a + b 实验仪器:凯特摆、光电探头、米尺、数字测试仪。 实验内容:1、仪器调节 选定两刀口间得距离即该摆得等效摆长l,使两刀口相对摆杆基本 对称,并相互平行,用米尺测出l的值,粗略估算T值。 将摆杆悬挂到支架上水平的V形刀承上,调节底座上的螺丝,借 助于铅垂线,使摆杆能在铅垂面内自由摆动,倒挂也如此。 将光电探头放在摆杆下方,让摆针在摆动时经过光电探测器。
让摆杆作小角度摆动,待稳定后,按下reset钮,则测试仪开始自 动记录一个周期的时间。 2、测量摆动周期T?和T? 调整四个摆锤的位置,使T?和T?逐渐靠近,差值小于,测量正、 倒摆动10个周期的时间10T?和10T?各测5次取平均值。 3、计算重力加速度g及其标准误差σg 。 将摆杆从刀承上取下,平放在刀口上,使其平衡,平衡点即重心G。 测出|GO|即h?,代入公式计算g。 推导误差传递公式计算σg 。 实验数据处理:1、l的值 l=?(l?+l?+l?)= σ=,u A =σ/=, ∴ΔA =t P ?u A =*= u B=ΔB /C=3= ∴u L == T e == 2、T?和T?的值 T?= σ=*10ˉ?s,u A =σ/=*10ˉ?s ∴ΔA =t P ?u A =*=*10ˉ?s u B=ΔB /C=3=*10ˉ?s ∴u T1 ==*10ˉ?s T?= σ=*10ˉ?s,u A =σ/=*10ˉ?s ∴ΔA =t P ?u A =*=*10ˉ?s u B=ΔB /C=3=*10ˉ?s
中国大陆构造环境监测网络技术规程 流动重力测量部分 1测量内容 流动重力测量是利用相对重力仪按一定的周期重复观测固定测点之间重力差的相对重力测量。 2技术要求 a)同一测段往返观测经固体潮、零漂和格值等改正得到每台仪器重力段差,3台仪器所测重力段差的互差限差为40X10七ms「2。特殊困难地区可放宽到 1.5倍。 b)平差后单程联测精度优于20X 10-ms-,点值精度平均值优于15X10七ms「2。 3设备配置 重力相对联测仪器设备见下表。 4测前准备 a)根据工作量、测量地区及交通状况制定实施方案,包括作业推进线路图、作业进度表。 b )人员培训,准备现场记录材料和配备数据处理系统; c)收集测区环境情况资料:包括点之记、观测环境情况、重力观测历史情况和测量结果等。 d )仪器检测。相对重力仪及其附属设备应根据相应仪器说明书或有关规程进行检查或检验。 e )检修车辆,检查和维修仪器箱的固定与减震设备; f)相对重力仪应每5年应进行一次格值一次项系数的标定,标定区间宜涵盖测区重力仪读数范围。格值标定有效期检查。 5观测实施 5.1至少采用3台重力仪。 5.2相对重力仪器检验与调整 a )日常检验(见附录1) b )定期检验(见附录2) 5.3联测方式 a )采用串式对称观测,即A T B T C T T C^ B—A ,或三程推进式对称观测
b)每站需读3次合格读数,LCR-g和Burris仪器每次读数需重新转动度盘,每次读数前需按同一方向逼近; c)一条测线应在3天内闭合,条件不允许时可延长到5天; d)一条测线中仪器静置超过2小时,应测定静态零漂并记录。 5.4绝对和台站点的相对重力联测 a)基准站的并置连续重力站比测点必须进行联测,测点周围30km内的其他绝对重力点必须进行联测; 地震重力固体潮台站,在交通条件许可时,应进行联测。 b)联测方式可采用环线或支线联测。 c)每期联测的点应相同,点位变更应重做点之记。 5.5观测记录与野外验算 a)观测记录采用陆态网络专用电子记簿; b )一条测线结束后,及时进行验算,验算时应加入格值、潮汐改正、气压改正、仪器高改正和零漂改正(见附录3),进行数据备份。 c)Burries重力仪观测数据记录与输出为:大数+FBK数(读数小数)*反馈系数k 6成果整理与工作总结 6.1成果整理 a)外业资料整理 ?电子记簿文档编目 ?外业概算成果整理 b )内业资料整理; ?测段互差统计 ?内业平差计算 ?成果分析 ?内业成果整理 6.2工作总结,内容包括: ?任务概述 ?测区自然地理概况 ?作业技术依据 ?作业过程概述 ?仪器使用情况 ?主要技术问题与处理 ?建议 6.3上交的成果和资料 ?实施方案(电子、纸质); ?观测记录(电子); ?观测计算资料(电子); ?测点的点之记(补充、修正点)(电子); ?重力仪检测资料(电子); ?测量成果表(电子); ?工作总结(电子、纸质); ?检查、验收或监理报告(电子版,纸质版)。 7质量控制 为保证工程质量,陆态网络建设实施2级检查、1级验收和2级监理质量控制体系。
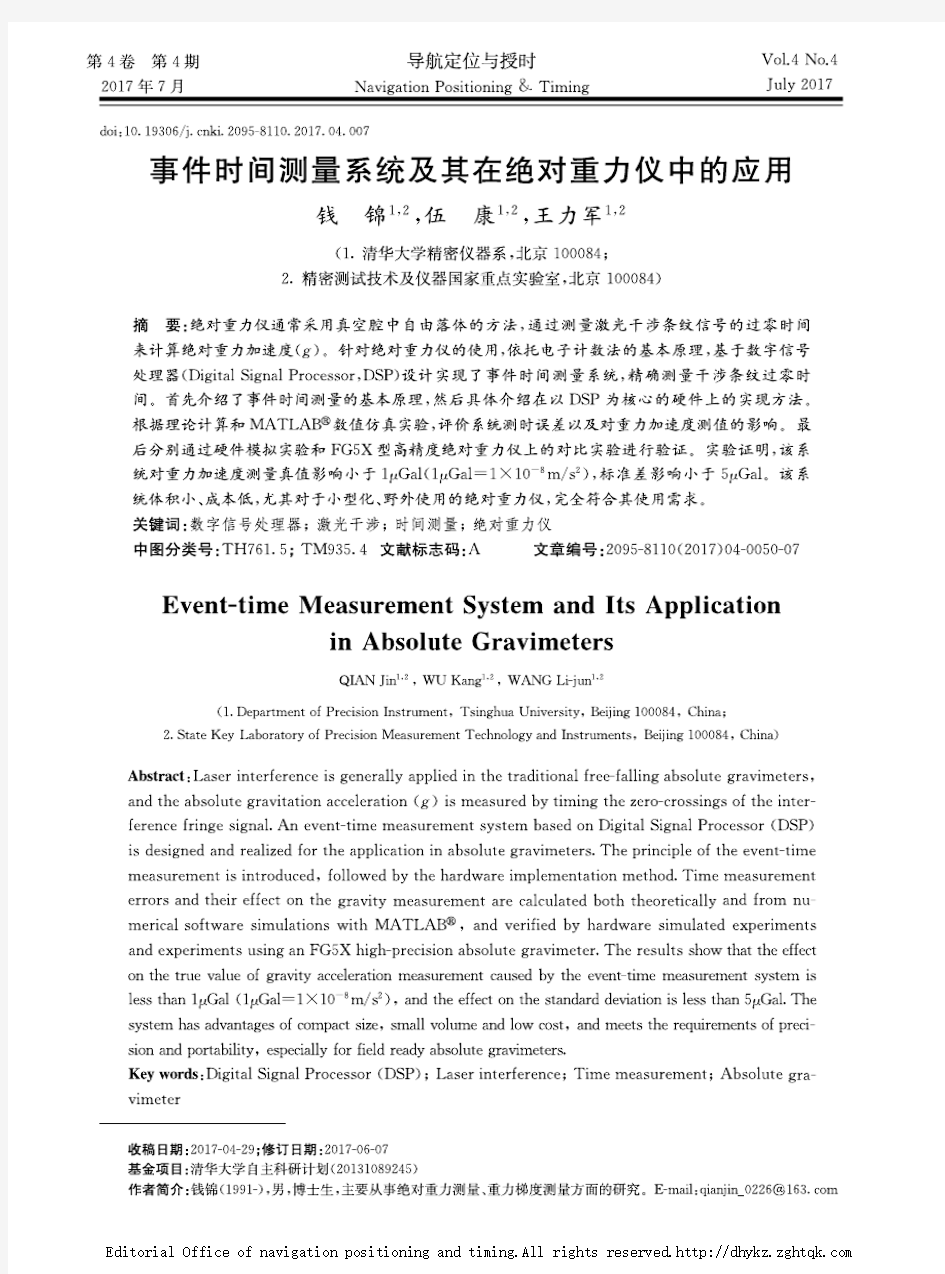
2.重力勘查的仪器 从原理上说,凡是与重力有关的物理现象都可以用于设计制造重力仪器,并用它们来测定出重力全值10-7~10-19量级变化,因此要求重力仪要有高敏度、高精度等良好性能。 2.1重力仪基本原理 根据测量的物理量的不同,重力测量分为动力法和静力法两大类,动力法观测的是物体的运动状态(时间与路径),用以测定重力的全值,即绝对重力值(早期的摆仪也可用于相对测量);静力法则是观测物体在重力作用下静力平衡位置的变化。以测量两点间的重力差,称相对重力测定,重力仪是一种精密、贵重的仪器。 2.1.1绝对重力测量仪器 绝对重力测量的简单原理是利用自由落体的运动规律,在固定或移动点上测量时有单程下落和上抛下落两种行程,自由落体为一光学棱镜,利用稳定的氦氨激光束的波长作为迈克尔逊(michelson )干涉仪的光学尺,直接测量空间距离:时间标准是采用高稳定的石英振荡器与天文台原子频率指标对比。观测时,仍然还有许多干扰因素影响重力值的精度测定,如大地脉动、真空度、落体下落偏摆等等,因此必须加以分析、控制和校正。 1)自由下落单程观测 图2.1表示自由落体在真空中的下落,其质心在时刻t 1、t 2、t 3相对经过的位置分别为h 1、h 2、h 3,时间间隔为T 1、T 2,经过的距离为S 1、S 2 ,则由自由落体运动方程式最后可导出重力值的公式: 1 21122)( 2T T T S T S g --= (2.1.1)
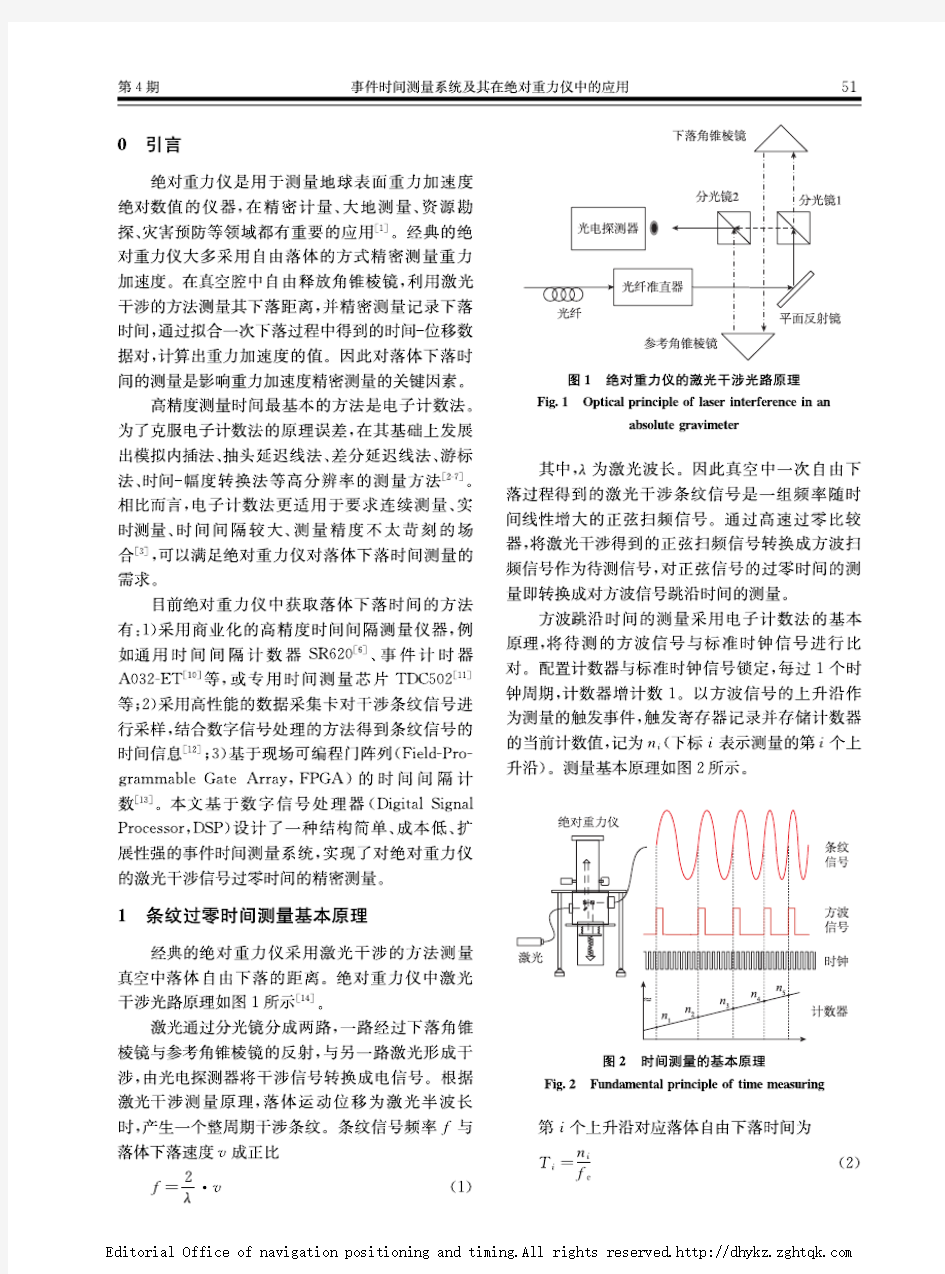
精确测定S 1、S 2是采用迈克尔逊干涉仪的原理,当物体光心在光线方向上移动半波长(21λ)时 ,干涉条纹就产生一次明暗变化,显示干涉条纹数目直接代表下落距离(2λN S =,N 为半干涉条纹数) 。这些干涉条纹信号由光电倍增管接受,转化成电信号,放大后与来自石英振荡器的标准频率信号同时送入高精度的电子系统,以便计算时间间隔与条纹数目,从而精确到S 1、S 2、T 1、T 2。 2)上抛下落双程观测 上抛下落对观测可避免残存空气阻力、时间测定、电磁等影响带来的误差,物体被铅垂上抛后,其质量中心所走的路程先铅垂向上而后下,其时间与距离的关系如图2.2。 图2.1 自由下落单程绝对重力测量示意图 图2.2 上抛下落双程绝对重力测量示意图
基于单片机的重力加速度测量 王磊 摘要:重力加速度通常使用重力加速度测量仪进行测量,其测量过程是通过两个光电门检测物体的下降时刻,由数字毫秒计显示物体所经历的时间,最后通过繁琐的手工计算求得,主要缺点是效率较低且不可避免粗大误差的影响。为了提高实验效率以及实验结果的准确度,我们对传统重力加速度测量仪进行了改进,主要是利用单片机对原实验的光电信号进行检测,通过VC编程完成较精确的计算、存储、显示以及数据处理等一系列工作,极大的改善了实验环境、丰富了实验内容以及提高了实验效率。 关键词:重力加速度;单片机;VC++ 0 引言 在力学实验中,通常测量重力加速度所用的重力加速度测量仪[1],是通过光电门得到物体的下降时间,并由数字毫秒计显示,通过设定不同的距离进行多次测量,然后按最小二乘法进行手工计算求得重力加速度值。其主要缺点是手工计算不方便,会引入计算误差,实验效率较低。 为了精确、有效地测量出重力加速度,设计了以上位PC机VC++程序作为主控制机,以AT89C51单片机作为辅助的重力加速度测量装置,所测时间以10μs 计,误差小,精度高,功耗低,比较适合物理实验用。 1 基本测量原理 物理上测量重力加速度的方法有很多,比如落体法、摆球法、液体测量法等等[2]。本文采用落体法测量重力加速度。基本原理如下: (1)根据自由落体运动,测下落的高度和时间.高度可由米尺测出。测量时间可用手表、秒表、打点计时、闪光照片、滴水法(自来水、滴定管)、光电门、单片机等。 (2)利用小球在保证初速度不变的情况下下落两个不同的高度,则有 , 。 是小球经过上光电门时的初速度。由上两式得:
(3)针对上个方案。采用多种数据处理,实验方案也不同,如多次测量、逐差法、作图法、最小二乘法等。 其结构简图如图1所示。开始时小刚球7被电磁铁6吸住,测量时断开电磁铁,使钢球以初速度为零下落,钢球依次通过二只光电管4和5,落到球座2中的球窝内,测量过程结束。 1—底座 2—球座 3—立柱及标尺 4—移动光 电管 5—固定光电管 6—电磁铁 7—小钢球 图1 测量装置简图 2 系统硬件电路及程序 2.1 硬件电路 本系统采用AT89C51芯片,完成从光电门接收数据,并把接收到的数据发送到PC机,而其他外围设备或芯片都起到辅助作用。AT89C51的最小系统电路图如图2中间部分所示,它由三部分组成:复位电路、时钟电路、中断指示电路[3]。复位电路和时钟电路都是使单片机正常工作所必须的电路,而对于指示灯电路是为了说明有外部中断信号。 AT89C51外部中断电路的作用是实现外部中断信号,也就是在遮光杆通过光电门时要单片机产生外部中断。
大学物理重力加速度的测定实验报告范 文 一、实验任务 精确测定银川地区的重力加速度 二、实验要求 测量结果的相对不确定度不超过5% 三、物理模型的建立及比较 初步确定有以下六种模型方案: 方法一、用打点计时器测量 所用仪器为:打点计时器、直尺、带钱夹的铁架台、纸带、夹子、重物、学生电源等. 利用自由落体原理使重物做自由落体运动.选择理想纸带,找出起始点0,数出时间为t的p点,用米尺测出op的距离为h,其中t=0.02秒×两点间隔数.由公式h=gt2/2得g=2h/t2,将所测代入即可求得g. 方法二、用滴水法测重力加速度 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n 取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法三、取半径为r的玻璃杯,内装适当的液体,固定在旋转台上.旋转台绕其对称轴以角速度ω匀速旋转,这时液体相对于玻璃
杯的形状为旋转抛物面 重力加速度的计算公式推导如下: 取液面上任一液元a,它距转轴为x,质量为m,受重力mg、弹力n.由动力学知: ncosα-mg=0 (1) nsinα=mω2x (2) 两式相比得tgα=ω2x/g,又tgα=dy/dx,∴dy=ω2xdx/g, ∴y/x=ω2x/2g. ∴ g=ω2x2/2y. .将某点对于对称轴和垂直于对称轴最低点的直角坐标系的坐标x、y测出,将转台转速ω代入即可求得g. 方法四、光电控制计时法 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n 取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法五、用圆锥摆测量 所用仪器为:米尺、秒表、单摆. 使单摆的摆锤在水平面内作匀速圆周运动,用直尺测量出h(见图1),用秒表测出摆锥n转所用的时间t,则摆锥角速度ω=2πn/t 摆锥作匀速圆周运动的向心力f=mgtgθ,而tgθ=r/h所以mgtgθ=mω2r由以上几式得: g=4π2n2h/t2. 将所测的n、t、h代入即可求得g值.
重力加速度的测量及应用 重力加速度g值的准确测定对于计量学、精密物理计量、地球物理学、地震预报、重力探矿和空间科学等都具有重要意义。 测量: 最早测定重力加速度的是伽利略。约在1590年,他利用倾角为θ的斜面将g的测定改为测定微小加速度a=gsinθ,。1784年,G?阿特武德将质量同为M的重物用绳连接后,挂在光滑的轻质滑轮上,再在另一个重物上附加一重量小得多的重物m,使其产生一微小加速度a =mg/(2M+m),测得a后,即可算出g。 1888年,法国军事测绘局使用新的方法进行了g值的计量.它的原理简述为:若一个物体如单摆那样以相同的周期绕两个中心摆动,则两个中心之间的距离等于与上述周期相同的单摆的长度。当时的计量结果为:g=9.80991m/s2。 1906年,德国的库能和福脱万勒用相同的方法在波茨坦作了g值的计量,作为国际重力网的参考点,即称为“波茨坦重力系统”的起点,其结果为g(波茨坦)=9.81274m/s2。 根据波茨坦得到的g值可以通过相对重力仪来求得其他地点与它的差值,从而得出地球上各地的g值,这样建立起来的一系列g值就称为波茨坦重力系统。国际计量局在1968年10月的会议上推荐,自1969年1月1日起,g(波茨坦)减小到9.81260m/s2。根据上述修正了的波茨坦系统,在地球上的一级点位置的g值的不确定度可小于5×10-7。 应用: 地球对表面物体具有吸引力,重力加速度是度量地球重力大小的物理量。按照万有引力定律,地球各处的重力加速度应该相等。但是由于地球的自转和地球形状的不规则,造成各处的重力加速度有所差异,与海拔高度、纬度以及地壳成分、地幔深度密切相关。 重力预震:地球物理学研究中要求观测重力长期的细微的变化,即所谓g的长度;这种变化可能是由于地壳运动,地球的内部结构和形状的演变,太阳系中动力常数的长度以及引力常数G的变化等等。观测这些变化要求g值的计量不确定度达10-8至10-9量级。观测g值的变化可能对预报地震有密切的关系.据有关方面报道,七级地震相对应的g值变化约为0.1×10-5m/s2。目前,许多国家都在探索用g值的变化作临震预报。 重力探矿:利用地下岩石和矿体密度的不同而引起地面重力加速度的相应的变化。故根据在地面上或海上测定g的变化,就可以间接地了解地下密度与周围岩石不同的地质构造、矿体和岩体埋藏情况,圈定它们的位置。所用的仪器是重力仪和扭秤(目前已为高精度重力仪所代替)。
Acceleration due to gravity 1. Aim: To measure ‘g’, the acceleration due to gravity using a simple pendulum. 2. Theory: A simple pendulum consists of a particle of mass m, attached to a frictionless pivot P by a cable of length L and negligible mass. When the particle is pulled away from its equilibrium position by an angle θand released, it swings back and forth as Figure 1 shows. By attaching a pen to the bottom of the swinging particle and moving a strip of paper beneath it at a steady rate, we can record the position of the particle as time passes. The graphical record reveals a pattern that is similar (but not identical) to the sinusoidal pattern for simple harmonic motion. Figure 1 A simple pendulum swinging back and forth about the pivot P. If the angle θis small, the swinging is approximately simple harmonic motion. Gravity causes the back-and-forth rotation about the axis at P. The rotation speeds up as the particle approaches the lowest point and slows down on the upward part of the swing. Eventually the angular speed is reduced to zero, and the particle swings back. If the angle of oscillation is large, the pendulum does not exhibit simple harmonic motion. The motion of a simple pendulum is nearly simple harmonic. The periodic time T is related to the length L of the pendulum and the local acceleration due to gravity g. 2 T=or 2 2 4 T L g π ?? = ? ?? If we measure the periodic time T for different lengths L, and plot T2 versus L,
重力加速度的测定 一,实验目的 1,学习秒表、米尺的正确使用 2,理解单摆法和落球法测量重力加速度的原理。 3,研究单摆振动的周期与摆长、摆角的关系。 4,学习系统误差的修正及在实验中减小不确定度的方法。 二,实验器材 单摆装置,停表(精度为0.01s),钢卷尺(精度为1mm),游标卡尺(精度为0.02mm) 三,实验原理 单摆是由一根不能伸长的轻质细线和悬在此线下端体积很小的重球所构成。在摆长远大于球的直径,摆球质量远大于线的质量的条件下,将悬挂的小球自平衡位置拉至一边(很小距离,摆角小于5°),然后释放,摆球即在平衡位置左右作周期性的往返摆动,如图2-1所示。 f =F sinθf θ T=F cosθ F= mg L 单摆原理图
摆球所受的力f 是重力和绳子张力的合力,f 指向平衡位置。当摆角很小时(θ<5°),圆弧可近似地看成直线,f 也可近似地看作沿着这一直线。设摆长为L ,小球位移为x ,质量为m ,则 L x = θsin f=θsin F =-L x mg - =-m L g x 由f=ma ,可知a=- L g x 式中负号表示f 与位移x 方向相反。 单摆在摆角很小时的运动,可近似为简谐振动,比较谐振动公式:a = m f =-ω2 x 可得ω=l g ,即02 22=+x dt x d ω,解得)cos(0?ω+=t A x ,0A 为振幅,?为初相。 应有[])2cos())((cos )cos(000?πω?ω?ω++=++=+=t A T t A t A x 于是得单摆运动周期为:T =ωπ 2=2πg L 即 T 2=g 2 4πL 或 g=4π22 T L 又由于细线不是完全没有质量,他在外力作用下也不可能完成伸长,所以,单摆的重力加速度公式修正为 22 21 4T d L g +=π 四,实验步骤 1,数据采集 (1)测量摆长L 用米尺测量摆球支点和摆球顶点或最低点的间距l ,用游标卡尺测量小球的直径d,则摆长 d l L 2 1+= (2)测量摆动周期 用手把摆球拉至偏离平衡位置约? 5放开,让其在一个铅直面内自由摆动,当小球通过平衡位置的瞬间,开始计时,连续默数100次全振动时间为t ,再除以100,得到周期T 。 (3)将所测数据列于下表中,并计算出摆长、周期及重力加速度。
《重力测量实习指导书》 2007年3月 赵晓燕 重力仪的安全保护须知 重力仪是一种精密、贵重的测试仪器,正确的、严格的保养维护是保证观测成果质量的前提,也是保证仪器安全所必须的。 (1)重力仪的保管和使用应建立严格的责任制,仪器的主管人员和使用人员应对仪器的安全负责,未经主管人员和操作者同意,别人不得随意动用仪器。重力仪的配件和工具一般应随仪器妥善保管,不得弃置或改作它用。 (2)长距离运输重力仪时应有专人负责,并尽量设法减震,严禁将仪器大角度倾斜,操作过程中防止对仪器的任何碰撞。仪器筒提手、挂钩和背带等应随时检查以发现隐患,予以及时消除。仪器放在底盘上后,操作员不得离开,以防意外事故发生。 (3)在野外观测中,重力仪要防止被阳光直照、淋雨。每日工作后应将仪器表面擦试一次,目镜应用软毛刷或擦镜纸轻轻擦拭,不准用其他不合适的代用品。 每周至每月应对脚螺丝清洗、润滑一次。 (4)存放重力仪的环境应安全、稳固、干燥,如长期不用应及时取出电池,并在放仪器的防展筒内放置干燥剂。 (5)重力仪的重大检修应送仪器厂或仪修站进行。在野外观测过程中如发现较大故障时,不得轻率动手,随意拆卸仪器部件,而应由具有一定检修经验的人员在主管批准下,于力所能及的范围内进行处理,检修时应有一个洁静的环境,且有两人同时在场才行。 (6)在发放和验收仪器时,应作相应的仪器性能检验,双方签署记录,严格交接手续。 实训一、重力仪的认识与操作 实训目的:认识ZSM型、CG型、GS型、DZW型重力仪的结构及其功能,学会ZSM型、CG型石英 弹簧重力仪的操作。 实训内容:熟悉ZSM型、CG型重力仪的操作面板,完成重力仪在一个点上的读数。 基本要求:每人分别完成一个点上的读数、记录任务。每人一个点上的读数的自差不大于0.4 格。 实训步骤: (1)了解重力仪运输防震设备、防震措施、建立重力仪运输、使用的安全意识。 (2)认识重力仪面板:计数器、目镜、纵、横水泡了望孔、电源与照明系统、脚螺旋。 (3)整平仪器:先调横脚螺旋,使横水泡居中,然后调纵脚螺旋,使纵水泡居中。 (4)旋转计数器使亮线与刻度盘零线对齐。 (5)取计数器的读数,读数为5位有效数字,三位整数,最后一位是估读的。 (6)重复(3)、(4)、(5)读取第二、三次读数。 (7)判断:三次读数最大值与最小值不大于0.2时,取其三次平均值作为本点重力读数。当
目 录 一、概述 (1) 二、主要特征 (1) 三、基本工作特性指标 (2) 四、面板描述 (4) 五、操作指南 (7) 六、工作原理简介 (8) 七、仪器的维护和保养 (9) 八、仪器附件 (10)
一、概述 ZC4137型低失真度测量仪是一台新型全自动数字化的仪器,是根据当前科研、生产、计量检测、教学和国防等用户实现快速精确测量的迫切需要重新设计的。最小失真测量达到0.005%,它是一台性能/价格比较高的智能型仪器,是中策仪器ZC41系列全数字失真仪家族中的最新成员。 被测信号的电压、失真、频率全部集中在一块LCD液晶屏上自动显示,采用了真有效值检波,电压测量可在输入电压300μV~300V,频率10Hz~750kHz内实现全自动测量;失真度测量可在输入电压50mV~300V,频率10Hz~150kHz内全自动测量,失真测量范围为100%~0.005%。该仪器具有平衡和不平衡输入电压和失真测量的功能,同时还具有测量S/N(信噪比)、SINAD(信杂比)的功能。幅度显示单位可为V、mV、dB,失真度显示单位可选择%或dB,S/N、SINAD 显示单位为dB。该仪器内设400Hz高通、30kHz和80kHz低通滤波器,方便用户使用。 该仪器是一台具有全自动测量信号电压、频率和信号失真等多种功能的新一代智能型仪器,也是当前在信号失真测量领域国内较高水平的一种全数字化、全自动、多功能型的智能化仪器。 二、主要特征 1.具有全自动失真度测试功能,内部自动校准,自动跟踪滤波。 2.可测量的最小失真度≥0.005% 3.设置了 30kHz,80kHz低通滤波器,降低了宽带非谐波(例如噪声)的影响,使测量低频段信号的谐波失真时更精确。 4.增加了测量信/杂比(SINAD)和信/噪比(S/N)的功能。 5.提高了测量信号失真时输入信号的电压范围:50 mV~300V。 6.具有测试平衡信号或不平衡信号的功能。 7.增设了频率计数功能,被测信号频率可直接由LCD液晶屏精确显示。8.保留了示波器输出监视插孔,方便使用者观察被测信号的波形,以及小失真信号测量时的整机滤谐状态。 9.陷波网络滤除特性可达90dB~100dB。 10.采用高精度真有效值检波器检波,有效减少检波误差。
自由落体重力加速度测量仪/重力加速度测量仪型号:HAD-LG-2 利用自由落体(条形物体)测定重力加速度,比球体测量准确.方便.配有数字毫秒计,五位半数显. 自由落体实验仪 1 自由落体重力加速度测量仪概述 自由落体实验仪是基础力学教学实验的必备仪器,利用自由落体实验仪可进行定性观测和定量研究物体在自由落体状态下的运动规律。从而达到教学演示实验的目的。 HAD-LG-2型为:主体高度1.6m,铸铁腿三脚支架,底座稳固,抗震动好,利于实验室摆放操作。 从教学使用出发,HAD-LG-1型为:主体高度1.2m,便携式三脚支架,底座轻巧,便于移动,利于课堂演示教学。 以上两种自由落体实验仪均可与J0201-G-2型计时器, J0201-CC存贮式计时器,J0201-CHJ存贮式数字毫秒计,J0416-2型多用大屏幕数字显示测试仪配合使用,适用于中学进行物理教学的演示实验或分组实验。 本仪器还可以与J02015-2型简易频闪光源和照相机同步配合使用,用频闪照像法研究自由落体运动的规律。 2 重力加速度测量仪技术性能 2.1 仪器总高: HAD-LG-1型≥1.2m ;HAD-LG-2型≥1.6m 2.2 实验有效高度: HAD-LG-1型≥1.0m ;xe77FT-LG-2型≥1.4m 2.3 电磁铁电源: DC6V 2.4 钢球直径: 18mm 2.5 g值实验相对误差:≤ 2% 3 结构与特点 3.1 见图一。仪器由带有标尺的铝合金型材为主体,顶端装有电磁铁吸球器,中间装有两个可任意移动的光电门光电传感器,下端装有接球架网,立柱下端固定在可调节的三脚支架上。 3.2 钢球的起始位置由电磁铁的固定支架端板的下端“ ”形的下边沿作为位置指针,能方便地调节确定钢球自由下落的起始刻度基准。 3.3 立柱上端装有电磁铁吸球器,当电磁铁线圈接通直流6V电源时,电磁铁吸住钢球,切断电源时,钢球下落作自由落体运动。电磁铁的支架上还装有两个接线柱,可以与频闪光源的同步输入开关及学生实验电源直流6V相连接用于频闪照相实验用。(注:原接电缆的接线端子可卸下不用) 3.4 两个光电门由小型聚光电珠和光敏接收管组成。两个光电门可以上下任意移动,在立柱上的位置由光电门支架的凹型槽底边所对标尺的刻度决定。
实验3 重力加速度的测量(单摆法) 单摆实验有着悠久历史,当年伽利略在观察比萨教堂中的吊灯摆动时发现,摆长一定的摆,其摆动周期不因摆角而变化,因此可用它来计时,后来惠更斯利用了伽利略的这个观察结果,发明了摆钟。 本实验是用经典的单摆公式测量重力加速度g ,对影响测量精度的因素进行分析,学习如何改进测量方法,以进一步提高测量精度。 【目的要求】 1、用单摆测定动力加速度; 2、学习使用计时仪器(停表、光电计时器); 3、学习在直角坐标纸上正确作图及处理数据; 4、学习用最小二乘法作直线拟合。 【仪器用具】 单摆装置,带卡口的米尺,游标卡尺,电子停表,光电计时器。 【实验原理】 把一个金属小球拴在一根细长的线上,如图1所示。如果细线的质量比小球的质量小很多,而球的直径又比细线的长度小很多,则此装置可看做是一根不计质量的细线系住一个质点,这就是单摆。略去空气的阻力和浮力以及线的伸长不计,在摆角很小时,可以认为单摆 作简谐振动,其振动周期T 为 g l T π 2= ,224T l g π= (1) 式中l 是单摆的摆长,就是从悬点O 到小球 球心的距离,g 是重力加速度。因而,单摆周期 T 只与摆长l 和重力加速度g 有关。如果我们测量 出单摆的l 和T ,就可以计算出重力加速度g 。 【实验内容】 1、固定摆长,测定g 。 (1)测定摆长(摆长l 取100cm 左右)。 图1 ①先用带刀口的米尺测量悬点O 到小球最低点A 的距离1l (见图1),如下所列: 再估计1l 的极限不确定l e 1,计算出标准不确定度31 1l l e =σ。 ②先用游标卡尺多次测量小球沿摆长方向的直径d (见图4-1),如下所列:
失真度测试仪 摘要 本系统由输入衰减电路,陷波器,检波电路,单片机系统与LCD 等纽成,实现对信号的失真度的测量。 陷波采用文氏桥有源陷波电路,使陷波深度大,结构简单,调试方便;检波电路采用专用集成电路,误差小, 实现简单;单片机控制使测试过程简单方便,体现智能化;LCD 与LED 显示界面直观,友好等优点。本设计 较好地实现了对信号失真度测量的功能。 一、 题H 要求: 1、 设计内容:设计一个失真度测试仪 2、 测试频率范围:20H ?20kHz 3、 失真度测量范围:30%~0.01% 二、 整体方案 1. 工作原理 非线性失真的程度可用非线性失真系数来表示,简称失真度。其定义为:「是谐波总功率与基波功 xlOO%, P 是信号总功率,P1是基波功率,Pi 为笫i 次谐波功率。 为测量方便,实际测量屮常接下式测量 式屮,分子表示谐波电压的总有效值,分母表示被测信号电压总的有效值。 图1基波抑制法测失真度原理框图 失真度仪常采用基波抑制法测量失真大小,原理框图如图1。开关接S1吋,即信号未经抑制,测量出被 测电压的有效值作为基准,称为“校准”,然后将开关接至S2,滤去基波后再经过测量,将两次测量结果经 过计算,可得出信号的失真度。 2. 结构框图 率之比的平方根,即
图2 整机框图 输入信号经过衰减,一?路信号直接进行有效值检波,另一路由文氏电桥对其基波进行吸收后,检波器对文氏桥输出的残余谐波信号检出直流号,单片机对检波后的两路信号进行AD转换和失真度的相应运算,得出失真度值和频率测试范围并在LCD, LED±显示。 三、方案论证与比较: 1?输入衰减器 方案一、使用电阻网络。电阻网络衰减器应用广泛,但其衰减过手动机械式实现,不具备先进性,故不采用。 方案二、采用AGC电路。AGC通过反馈来调节增益,使输岀幅度保持一定,这种闭环控制电路有很好的效果,但其电路复杂,且电路本身会产牛一定的噪声,使信号产牛的失真,故不采用。 方案三?数字电位器体积小,使电路结构简单,便于实现单片机控制,但价格过高,使整机性价比降低。 2?陷波器 方案一、双T陷波滤波器 结构简单,可运用一个运算放大器来实现一个陷波器。但调谐屮心频率包括了对3个相同阻值电阻器的同时调整,电阻器不匹配会使陷波器陷波深度不够,调谐需采用高精度的组件,双T结构难以在单电源下工作且不能用全差动放大器来实施,故不采用。 方案二、文氏电桥有源陷波器 文氏桥陷波电路的失真度设计屮最常用的器件,其基波衰减深度一般可达80dB以上,且结构简单,易于装配和调试。 基于电路的易实现和方便调整性,我们选择文氏电桥作为陷波器。 3?检波器 方案一、专用检波集成电路 专用集成检波电路集成度高,外围电路少,电结构路简单,工作稳定,误差小。 方案二、分离器件检波 分离器件实现检波具有结构简单等优点,但由于失真度测量输入信号本身就是不规则的失真信号,而分离元件组成的有效值检波电路是在检测出信号的峰值后按照一定的关系计算得出有效值,一般只能用于检测规则信号(诸如正弦波等信号),输出误差较大,不适用于失真度仪。 通过以上分析,选用专用集成电路检波。 四、电路设计 (1)输入衰减器
实验一自由落体重力加速度的测定 一、实验目的 1. 通过测定重力加速度,加深对匀加速运动规律的理解: 2. 学习用光电法计时; 3. 学习用落体法测定重力加速度. 二、仪器组成 YJ-LG-3自由落体重力加速度测定仪、YJ-LG-3自由落体重力加速度测定仪专用毫秒计、钢球、卷尺等 三、仪器结构 1. YJ-LG-3自由落体重力加速度测定仪专用毫秒 计面板如图l所示 2. 自由落体测定仪如图2所示 四、实验原理 在重力作用下,物体的下落运动是匀加速直线运 动.可用下列方程来描述: 式中s是在时间t内物体下落的距离.g是重力加速度.如果物体下落的初速度为0,即Vo=0时, 可见若能测得物体在最初t秒内通过的距离S,就可以 估算出g的值,在实验中要严格保证初速度为零有一定 的困难.,故常采用下列方法:实验时,让物体从静止开 始自由下落.如图3所示,设它到达A点的速度为V0. 从A点开始,经过时间t1到达B点,令A、B两点的距 离为S1., 则 若保持上述的初始条件不变,则从A点起,经过时
间t2后.物体到达C点.令A、C两点的距离为S2.则 由式3和式4得: 以上两式相减,得: 那么就有 这里不再出现初速度值,式中的各值均可用自由落体测定仪测量得到. 五、实验步骤 1.调节自由落体仪垂直.将重锤装置安装好,调整底座上的调节螺旋,使重锤悬线与落体仪两立柱平行. 2.将第一光电门放在立柱A处.如离顶端20cm处,调第二光电门于B处.如两光电门相距90cm处,将实验装置上的激光器、接收器与YJ-LG-3自由落体重力加速度测定仪专用毫秒计连接,打开电源,可看见激光器发出红光. 3.调节上、下两个激光器。使激光束平行地对准重锤线后,取下重锤装置. 4.保持上、下两个激光器位置不变,调节上、下两个接收器分别与对应的激光器对准(使激光束垂直射入接收器入射孔),直至用手指通过上、下两光电门时,专用毫秒计能正常计时. 5.按动YJ-LG-3自由落体重力加速度测定仪专用毫秒计功能键(使用方法见附录),选择计时精度为0.0001s,(测完一组数据后,按动复位键归零). 6.用手指托住钢球至落球定位孔,迅速松开手指,记录钢球自由下落通过上、下两光电门的时间t1。 7.用卷尺置于两光电门之间,测出两激光束之间的距离S1。 8. 重复以上步骤,测量八组数据,求平均值. 9.重复以上步骤,改变两光电门距离,用卷尺置于两光电门之间,测出两激光束之间的距离S2,测量八组t2数据,求平均值. 10.将实验数据填入下表.并按式(8)计算重力加速度g.求其误差.
卫星重力测量-基础、模型化方法与数据处理算法 作者简介:张传定,男,1966年04月出生,1996年09月师从于解放军信息工程大学陆仲连教授,于2000年12月获博士学位。 摘要 论文的中心内容是卫星重力测量中如何由星载传感器获得的观测数据恢复地球重力场这一过程的模型化问题。旨在吸取前人的研究成果,提出更加合理的数据处理模型。论文最突出的贡献是,改造并完善了大地重力学、空间大地测量、卫星轨道力学等学科模型化的理论与方法以适应卫星重力测量这一新型观测技术。作者的主要工作和创新点有: 1.在综合卫星重力测量有关最新研究成果的基础上,系统地论述了动态加速度测量、卫星重力梯度测量的基本原理;论证了它们的测量精度与姿态角加速度的关系以及卫星重力测量系统最终恢复地球重力场能力的判定准则;深入理解并掌握了现行SST、SGG卫星CHAMP、GRACE、GOCE各项指标及恢复地球重力场各频段的精度指标。 2.简要介绍了卫星重力测量中所涉及到的曲线坐标系下矢量、张量与曲线坐标之间的微分关系、坐标系之间的变换关系以及它们的矩阵表示。详细研究了在地球重力场确定中常用的关于研究点P和流动点Q相互关联的球极坐标系,给出了球极坐标系下地球引力位V关于P点和关于Q点的微分公式以及它们与球坐标系下局部微分算子的关系。深入研究了关于P和Q两点局部导数算子的相互作用问题,得到了扰动场元之间核函数和协方差函数的解析与级数展开式,首次给出了较为实用的明晰表达式。此结果是对物理大地测量学关于这一论题的补充和完善。这项工作是本文的一个创新点。 3.详细推导了地球、卫星、加速度传感器检验荷载这一特殊限定性三体问题的运动方程;指出星载加速度传感器的输出就是卫星所受非引力加速度和检验荷载相对于卫星中心地球引力的潮汐力之差;进而得到了由星载加速度传感器的比力测量和GPS跟踪测量数据直接恢复地球引力矢量的理论公式。 4.通过对扭秤、旋转梯度仪工作原理的考察和Molodensky关于垂线偏差推求高程异常的论述以及目前业已发现水平梯度分量的某种组合是球面正交函数系的事实,作者明确指出,在地球重力场的研究中,水平方向观测量的组合应作为复数使用。扰动场元观测量的复数表达是本文立论和各种模型化(建模)工作的思想基础,也是本文最为突出的创新点。 5.在§2.7中,直接由体球谐函数水平梯度的复表示定义并证明了描述地球引力位直到二阶水平梯度所需的球面正交函数系。它们关于纬度的函数是Legender函数及其导数的拟线性组合,可由目前熟知有关Legender函数及其导数的递推公式给予赋值。连同球谐函数构成了描述引力矢量、引力梯度张量所需的正交函数系。因而,利用它们可将引力矢量、引力梯度张量的复分量表达成一致的形式。 6.利用卫星重力测量数据恢复地球重力场,若从边值问题理论上可将其归结为平均轨道面上卫星重力测量超定边值问题。通常又将利用单个边值条件确定扰动位问题称为单定问题。在§3中,先以重力异常为例,类比依次给出直到二阶梯度球域单定连续边值问题恢复地球引力位系数的理论公式及其外部解析解和向下延拓截断核函数解;接着导出离散网格平均重力异常对应的简单调和分析公式和最小二乘调和分析公式;然后推广得到广义梯度调和分析公式和超定边值问题的最小方差解、最小二乘解。并证明了最小方差解等价于单定边值问题调和分析解的频域加权平均;最小二乘解等价于单定离散边值问题最小二乘调和分析解法方
重力仪器使用及注意事项
甘肃省地质调查院201项目
由于工作区位于甘肃陇南秦林山脉一带,山高谷深,区内地形复杂,切割十分厉害,森林覆盖率高,给区域重力调查工作带来不利因素,为了更好地使用重力仪器,安全工作尤为重要,为了圆满完成生产,保证安全生产。根据重力规范及CG-5重力仪操作手册等方面的内容,结合区内实际情况,特制定重力仪器使用注意事项,以保证项目的生产安全,望重力操作员遵照执行。 (1)有几个仪器参数需要进行定期的检查,如果需要,可以使用辅助键盘进行修改。随着仪器的老化,就不需要频繁的检查仪器参数了。需要定期进行检查和调整的参数有: ●漂移 ●倾斜补偿 ●倾斜灵敏度 ●校准常数 (2)在任何情况下,漂移校正检查的间隔时间不得大于三个月,同时根据需要更新漂移值和启动时间。对于新仪器,要连续四周每周一次进行漂移校正检查,此后大约每一个月检查一次。对于大部分的传感器,漂移率将随着老化而降低,特别是前两个月。 (3)倾斜传感器偏移调整:大约每两个月需要对仪器进行一次倾斜校正。选择一个安静的位置,将仪器放置在三角架上,仪器下的地板应该是坚硬的(水泥地板最好),木地板或地毯是不可用的。在大部分情况下,新旧偏移值的差别应该很小。一般小于10或20角度秒,. 如果大于该范围,则测量过程很可能存在问题。-此时请不要接受此值,并进行重新测量。如果新旧值之差大于100角度秒,请多次进行重复测量,并在接受新的偏移值之前和Scintrex联系。 (4)仪器的存放:要使你的仪器能得到最为精确的测量值,存放时要遵守下面几个步骤: ?将仪器调整水平 ?在不用时,总是保持仪器和电源相接 ?存放在干燥安全的地方 ?在仪器储存时,移去电池槽的门,这样可以防护电池组所产生的气体对仪器的影响。 (5)仪器长期存放的库房应防止过热和过冷,应注意防潮、防腐蚀、防光系发霉,应取出电池恒温仪器每月通电恒温4;低于5d。 (6)电源使用中的问题 ?电源的范围100—240V如果在野外有变化清处理。不要随便使用外接电源 ?电池使用的是6.6AH,在25度时可工作14--16个小时。 ?建议充电时的温度在0—45度 ?建议在一定时间用外部充电器,可对电池进行重新标定。当主机显示不出电池状态时,电池需要重新标定。 (7)CG-5 不能识别电池怎么办? ?CG-5的Smart电池会被主机识别并显示其电量。如果电池电量太低,CG-5主机将不会识别它们。或者电池比平时充电时间快。 ?解决办法:建议在一定时间用外部充电器,可对电池进行重新标定。当主机显示不出电池状态时,电池需要重新标定。标定完毕后,CG-5将会重新识别电池。
高精度失真度测试仪 摘要:设计并制作了一个高精度失真度测试仪,用于测量正弦波、方波以及三角波等等信号波的失真度。该测试仪硬件系统基于AT89S52单片机,控制包括过零比较整形电路,倍频锁相环,加法器,A/D信号采集和系统显示板五部分组成;软件基于离散型傅立叶变换,应用准同步技术的失真度测量方法。由于锁相环的作用,使得采样周期与信号周期严格同步,有效地克服了传统的基于DFT的失真度测量方法中非整周期采样引起的频谱泄漏对测量结果的影响,实验结果表明,该方法的采用使失真度测量的准确度提高了一个数量级,测量误差在百分之一以下。 关键字:倍频锁相环,A/D信号采集,离散型傅立叶变换
目录 1. 系统设计 (3) 1.1 设计要求 (3) 1.1.1 设计任务 (3) 1.1.2 技术要求 (3) 1.2 总体方案 (3) 1.2.1 总体设计思路 (3) 1.2.2 总体设计方案 (4) 1.3单元电路设计 (4) 1.3.1 过零比较整形 (4) 1.3.2 加法器 (4) 1.3.3 锁相环 (5) 1.3.4 数据采集 (7) 1.3.5 结果显示 (7) 2. 数据处理 (7) 2.1 准同步采样原理 (7) 2.2利用准同步技术实现失真度的高精度测量 (9) 2.2.1 失真度的定义 (9) 2.2.2 周期信号基波和谐波幅值的测量 (9) 2.2.3 基于准同步算法的失真度计算 (10) 3. 软件设计 (10) 3.1 开发软件及编程语言的简介 (10) 3.2 总体程序流程 (10) 4 系统测试 (12) 4.1 测试仪器与设备 (12) 4.2 指标测试 (12) 参考文献 (12) 附录:c51程序: (13)