
运算放大器的稳定性
第5部分(共15部分):单电源缓冲器电路的实际设计
作者:Tim Green,德州仪器公司
本系列的第5部分将着重讨论“实际”应用,我们到目前为止所学会的技巧和经验都将得到应用,帮助我们方便地稳定一个复杂的电路。我们将设计一个通用单电源缓冲放大器(将2.1V 缓冲至4.1V参考),5V单电源供电使它能够线性地工作,可提供较大的输出电流(>13mA),并在 -40°C 至 +125°C工作温度范围的飘移为0.4V。虽然可将该电路用于许多应用中,但我们仍将简要介绍一下促使给出这个设计的原因,并解释为何没有现成的电路可用来完成此项工作。我们这里采用综合技术来开发器件网络,以提供一个证明对许多运放应用都有益的稳定电路。
技术背景:
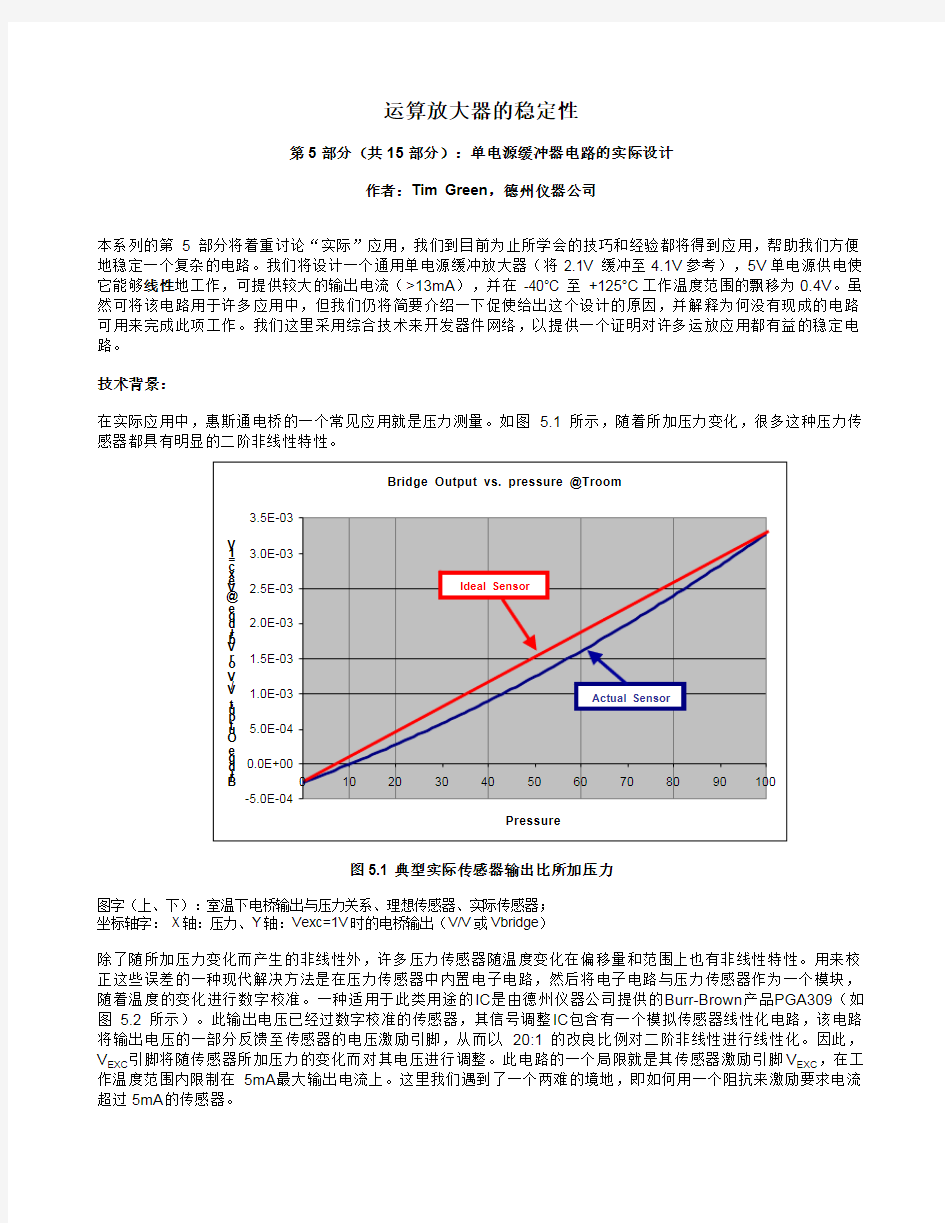
在实际应用中,惠斯通电桥的一个常见应用就是压力测量。如图 5.1所示,随着所加压力变化,很多这种压力传感器都具有明显的二阶非线性特性。
图5.1 典型实际传感器输出比所加压力
图字(上、下):室温下电桥输出与压力关系、理想传感器、实际传感器;
坐标轴字: X轴:压力、Y轴:Vexc=1V时的电桥输出(V/V或Vbridge)
除了随所加压力变化而产生的非线性外,许多压力传感器随温度变化在偏移量和范围上也有非线性特性。用来校正这些误差的一种现代解决方法是在压力传感器中内置电子电路,然后将电子电路与压力传感器作为一个模块,随着温度的变化进行数字校准。一种适用于此类用途的IC是由德州仪器公司提供的Burr-Brown产品PGA309(如图 5.2所示)。此输出电压已经过数字校准的传感器,其信号调整IC包含有一个模拟传感器线性化电路,该电路将输出电压的一部分反馈至传感器的电压激励引脚,从而以20:1的改良比例对二阶非线性进行线性化。因此,V EXC引脚将随传感器所加压力的变化而对其电压进行调整。此电路的一个局限就是其传感器激励引脚V EXC,在工作温度范围内限制在5mA最大输出电流上。这里我们遇到了一个两难的境地,即如何用一个阻抗来激励要求电流
图 5.2:现代数字校准传感器信号调整器
图字(左右、上下):非线性电传式感器、线性化电路、参考、模拟传感器线性化电路、线性化DAC、故障监视器、自动零点PGIA、过/欠刻度限幅器、模拟信号调整电路、外部温度、数字温度补偿、内部温度、温度ADC、控制寄存器接口电路、线性Vout、数字计算。
设计要求:
图 5.3详细给出了主要的设计指标。我们希望用一个容差为10%的5V电源来供电。我们需要一个统一增益缓冲器,因为我们不希望在PGA309线性化环路中引入任何误差。由于PGA309在V EXC引脚上有很宽的可编程范围,因此我们需要容纳从 2.1V至 4.1V的电压范围。我们最小的传感器阻值为300?。因此,对于最大 4.1V的输出电压,我们至少需要提供13.6mA的电流。PGA309线性化电路具有大约35 kHz的带宽。由于环路闭合的方式,我们的缓冲器带宽至少要等于或大于线性化环路的带宽。我们将目标定为100kHz的小信号闭环带宽。对于我们感兴趣的传感器应用来说,大信号响应若有1V/μs的摆动速率就足够了。该设计在从 -40°C 至 +125°C的温度范围内应该是稳定工作的。因为我们不希望由于缓冲器的原因而在最后应用电路中引入任何额外的误差,因此我们需要一个在运放共模输入范围内不会有任何交叉失真的电路。我们将简要讨论一下这个问题,因为它几乎对所有CMOS 单电源轨至轨输入 (RRI) 运放来说都是一个问题。
Requirements:
?Single Supply (4.5V< V
< 5.5V)
S
?Unity Gain Buffer
?V
= 2.1V to 4.1V
IN
?RL = 300?to 820?
?I
= 13.6mA (4.1V / 300?)
OUT MAX
?Small Signal Bandwidth 100kHz
?Large Signal Slew Rate 1V/μs
?-40°C < Operating Temperature < +125°C
?No crossover distortion in CM range of Op Amp Input
图字:
指标:
单电源(4.5V 统一增益缓冲器 V IN=2.1V 至4.1V RL=300?到820? I OUT MAX=13.6mA→(4.1V/300?) 小信号带宽100kHz 大信号摆动速率1V/μs -40°C <工作温度<+125°C 在运放的共模范围内不能有交叉失真 对于轨至轨输入运放,传统的解决方案是将N沟道和P沟道MOSFET并联使用来实现轨以外的摆动。问题是这里存在着一个过渡区,如图5.4所示,此处两对晶体管都是打开。在此区域,PSR、CMR、偏移电压及偏移漂移都与通常情况不同。现代解决方法采用正在申请专利的低噪声电荷泵浦技术,来避免使用传统技术中的并联N沟道与P 沟道MOSFET。这样就能消除偏移量被打乱的过渡区。在整个共模范围内,OPA363和 OPA364均有线性偏移。上面给出的典型曲线是对 1.8V电源来说的。当电源电压升到 +5V时,V OS的变化及非线性特性将变得更差。因此,为获得共模输入电压下最好的线性度,我们将采用OPA364。 图5.4:单电源、RRI运放V OS比共模输入电压关系曲线 图字:竞争产品、共模电压(V) 图5.5给出了OPA364的一些关键指标: OPA364 RRIO Op Amp Supply: 1.8V to 5.5V Temp Range: -40C to +125C Common Mode Voltage Range: (V-)-0.1V to (V+)+0.1V Slew Rate: 5V/μs Gain Bandwidth: 7MHz 图5.5:OPA364关键指标 图字:OPA364 RRIO运放 电源电压:1.8V至5.5V 温度范围:-40°C至+125°C 共模电压范围:(V-)-0.1V至 (V+)+0.1V 摆动速率:5V/μs 增益带宽:7MHz 输出电压摆动与输出电流之间的关系、输出电压(V)、输出电流(mA) 设计拓扑: 既然我们知道我们所拥有的电压空间很少,那么让我们使用双极型晶体管而不是MOSFET,因为双极型晶体管的Vbe大约为0.65V,而MOSFET的栅-源电压可能为2V或更大。此外,让我们使用如图5.6所示的射极跟随器结构。由于将超出电压空间,因此,如图5.6所示,在任何温度下都无法使用射极跟随器结构,且在 -40°C温度上情况最差。 V EXC 图5.6:使用射极跟随器?–– 容易稳定! 让我们先保留双极型晶体管,因为我们还是只有很少的电压空间。但让我们把晶体管变成一个PNP 型,如图5.7所示。现在我们看图 5.7所示的拓扑结构时觉得它看起来有点奇怪。乍一看,我们可能认为它似乎像使用了正反馈而且即将产生振荡!但经过进一步检查后我们会发现,事实上通过T1我们获得了一个180度的反相。我们可以直观地看到随着U1输出的降低,更多的基极电流被驱动流过T1的基极,这将导致更多的电流流入T1的集电极并流过负载RL 。然后这又会导致VOUT 增加。因此U1输出的降低将导致VOUT 的增加。由于这个反相,我们的电路拓扑将用负输入U1来作为输入,而将正输入U1作为反馈点。 我们将增加一个R1来限制 OPA364在启动或瞬态条件下所需的最大瞬态或直流电流。R1还将运放的输出与晶体管T1的寄生电容进行隔离,这样就提供了一个地方,如果需要的话可方便地加入稳定性网络。 图5.7:基本缓冲放大器电路拓扑 图字:选择PNP 晶体管以得到靠近电源轨的摆动及大电流 要求反馈至运放+由于通过晶体管反相的输入 选择OPA364避免共模交叉失真 假定最小 VOA =0.1V 选择R1来限制流入OPA364输出端的最大Ib 值 最大Ib =4.7V/500欧姆 =9.4mA :一个合理值 R1也提供了VOA 和T1基极之间的“隔离” R1还使我们有潜在地方来加入稳定性网络 图5.8详细给出了我们所需要的有关T1——2N3906 PNP 晶体管的一些关键参数。 4.1Vdc Choose PNP transitor for close swing to the rail and high current Requires feedback into OP Amp +input due to phase inversion through transistor Choose OPA364 for no CM crossover distortion Assume VOA min = 0.1V Choose R1 to limit the maximum Ib into OPA364 Output Ib max = 4.7V / 500 oms = 9.4mA: a reasonable value R1 also provides “isolation” between VOA and T1 base R1 will also allow us a potential place for stability networks to be added V in 图5.8: T1-2N3906关键参数 图字:开通特性 直流电流增益、集电极-发射极饱和电压、基极-发射极饱和电压 1/β分析: 现在我们开始对缓冲器电路进行稳定性分析。首先,图5.9详细给出了直流1/β项的计算。假设T1拥有hfe = 200的电流增益,300?负载需要从缓冲器电路上得到4.1V 上的13.67mA 电流。这意味着T1处的基极电流将需要68.35uA 。假设T1的压降Vbe 为0.7V ,我们将看到VOA 将需要4.2658V 电压来提供T1所需的基极电流。如图5.9所示,这意味着OPA364的输出电压若有0.0342V 的变化,将导致13.67mA 的电流流入RL 。因此,我们可以计算在此电路中与电压有关的β项,得到的计算值为119.88。对直流1/β,这意味着 -41.5dB 的值。对大多数运放电路而言,1/β通常是一个正数,但我们所开发的技术仍然有效,并使我们能分析此电路拓扑。通过在运放电路的反馈路径中增加增益,我们就得到了一个负的1/β值。我们知道,在晶体管T1中有寄生电容,我们猜测它可能会在反馈路径中引入几个高频极点——亦即1/β曲线上的零点。但无论是从器件数据资料来看,还是经过和经验丰富的IC 设计者就如何在环路分析中方便地确定电容的影响进行长时间讨论以后,这一点也并不十分明显。因此我们将获取制造商的SPICE 晶体管模型,并用Tina SPICE 仿真来为我们演示它们应位于何处。 图5.9:什么是直流1/β? 图字:我们知道在某些地方会有一些高频极点(由于T1的寄生电容),但我们不能确定在哪里? We know there is some high frequency roll-of somewhere (due to parasitic capacitances of T1) but not sure about where?V in 图5.10显示我们如何用Tina SPICE 电路来寻找可能出现的高频极点。请注意,我们使用了一个直流电压V1,它设置了我们的直流工作点,这样晶体管T1就在其实际工作点附近被偏置。这能保证我们能获得适当的交流分析结果。 图5.10:“高频极点在哪里?”电路 图字:Aol=VOA/(VOUT-VM) 1/Beta=Vloop/VOUT 环路增益=VOA/Vloop 图5.11给出了我们寻找高频极点的仿真结果。我们注意到,对RL = 300? 来说直流1/β值为 -30.89dB 。我们用一阶分析得到的预测值为 -41.5dB 。如同实际的结果,仿真结果也依赖于实际使用的晶体管。对于RL = 820?,仿真结果表明直流1/β值为 -39.6dB 。我们确实希望β值会随负载的增加而增加(1/β值降低)。VOUT 保持不变,但负载增加时IOUT 减少,因此基极电流变小,ΔVOA 也变小。这就说明,将β设为较大值(1/β设为较小值)时VOUT /ΔVOA 将变大(负dB 数量级更大)。我们看到高频极点在大约736kHz 处。为便于使用一阶分析,我们取直流 1/β值为 -40dB 而高频极点为1MHz 。根据我们关于稳定性的一阶闭合速度准则,我们发现电流缓冲电路是不稳定的(fcl 处的闭合速度为40dB/Decade )! T Frequency (Hz)G a i n (d B ) 作为对我们的不稳定性预测的快速验证,我们对如图5.12所示的现有缓冲器电路做了一个Tina 瞬态分析,这类似于我们的实际稳定性测试。如图5.13所示,我们发现它振荡得很严重! V 1 0 图5.12:瞬态分析电路 –––– 缓冲器拓扑w/o 补偿 T Time (s) 图5.13:瞬态分析结果 –––– 缓冲器拓扑w/o 补偿 我们在实验室建成了缓冲器拓扑w/o 补偿结构,以100Hz 方波激励的结果如图5.14所示。现在,通过预计电路的不稳定性,我们“闭合了环路”。通过用一阶分析预测,再用Tina SPICE 仿真,最后在实际电路中证明这个电路如同预计的一样,是不稳定的。振荡的准确频率与SPICE 仿真结果并不相同,这是因为使用了别的晶体管来代替T1,就算实验室有2N3906可用的话,也无法得到2N3906在 SPICE 模型中所具有的确切参数。 VG1 VM VOA VOUT VIN VOUT foscillation = 8.7MHz 图5.14:“实际瞬态稳定性测试结果” –––– 缓冲器拓扑 w/o 补偿 为进一步进行我们的一阶稳定性分析,我们需要从数据资料中找到OPA364的Aol曲线,曲线如图5.15所示。 图5.15:OPA364数据资料Aol曲线 图字(上下、左右):开环增益/相位与频率关系、电压增益(dB)、相位 (°)、频率 (Hz)。 在图5.16中,我们分析了缓冲器电路拓扑w/o补偿原理,并给出了采用两条反馈路径的解决方案。我们的Aol曲线是取自厂商的数据资料(见图5.15)。标为“缓冲器拓扑w/o补偿”的曲线是我们的直流Beta分析结果,我们用Tina SPICE仿真来找出高频极点。现在我们利用十倍频程经验法则来调整FB#1,这是我们缓冲电路中已有的反馈路径。我们注意到,在fcl处,我们想得到20dB/decade的闭合速度。从 -40dB 到0dB的距离较大,因此我们每次用掉数量上的一个十倍频程,这使我们得到如图5.16所示的阶跃式上升,频率上也是如此。一旦我们在FB#1曲线上达到1MHz,由于晶体管电容的寄生效应,我们需要加入高频极点(从1/Beta w/no补偿曲线)。我 加第二条反馈路径FB#2 1MHz 时占优势,且1/βFrequency (Hz)G a i n (d B ) -60-40 -20 0204060 80 100120 图5.16:1阶分析:Aol 与1/β曲线 图字:所期望的FB#2 1/β-、所期望的FB#1 1/β+、所期望的1/Beta 1/(β--β+)、1/Beta w/no 补偿 如果我们将1/β曲线转化成β曲线的话,我们将更容易将需的1/β曲线综合至器件中。正如我们在反馈环路中“围绕”缓冲器电路一样, 我们可以更容易地知道在哪里增加所需的极点和零点。如图 5.17所示,我们利用有关β和1/β互为倒数的知识,可方便地画出β曲线。在 FB#2 中我们需要增加fZ3。而在FB#1 中我们则需要增加fz1、fp2与fz2。由于晶体管T1的寄生电容,fp0已经存在。 图5.17:得自1/β+的β+曲线与得自1/β- 的β-曲线 当我们看图5.18时,我们首先环顾FB#1周围,找出在哪里我们可以方便的加入fz1、fp2及fz2。由于在我们以β+视图沿着环路的行走过程中,fz1是一个极点,因此我们可以方便的通过增加 C2来加入该点,且可以利用已有的R1来使用它。fp2作为β+视图中的零点,可以通过电阻R3与C2的串联来加入。fz2作为β+视图中的极点,可以通过增加电容CL 与负载电阻RL 并联来实现。事实上,CL 起了双重作用。除有助于提高回路的稳定性外,它还作为阻性电桥负载的局部高频旁路,这里用RL 来表示。FB#2 要求我们加入β-视图中的极点fz3。这可通过增加反馈电容C1与输入电阻R2来实现。鉴于完整性,我们考虑是否要将RO 的影响包括进来,RO 是我们在计算β 和 1/ β时运放的开环输出电阻。对于OPA364,RO 为160?。对FB#2来说,VOA 是RO 与T1基极输入(它看起来是个大阻抗)的中点。对于FB#1,RO 与R1串联,为500?,这对我们的一阶分析来说并不会带来 很大的误差。因此在此电路中,对于一阶分析,我们可以忽略RO 的影响,同时检查与使用Tina SPICE 仿真的结果是否相接近。 F o r E a s e o f C i r c u i t I m p l e m e n t a t i o n –U s e βP l o t s requency (Hz) G a i n (d B ) F -60-40 -200 20 4060 80100 V 1 4.From our Loop Stability Tricks and Rules-Of-Thumb: Look at FB#1 (1/β+) and FB#2 (1/β-) and add poles and zeros where our desired 1/βbreakpoints are. Often this is easier to do from a β+ and β-plot.FB#1 (1/β+): fz1 = 1 / (2 ·П·R1·C2) fz1 = 1kHz (Pole in β+ Plot)fp2 = 1 /(2 ·П· R3·C2) fp2 = 10kHz (Zero in β+ Plot)fz2 = 1 / (2 ·П· RL·CL) fz2 = 100kHz (Pole in β+ Plot)FB#2 (1/β-): fz3 = 1 / (2 ·П· R2·C1)fz3 = 100kHz (Pole in β-Plot) Remember a smaller V FB Smaller β Larger 1/β 图5.18:用于稳定性的极点与零点综合 图字: (β+曲线上的极点) (β+曲线上的零点) (β+曲线上的极点) (β-曲线上的极点) 从我们的环路稳定性技巧和经验可得: 考虑FB#1(β+)和FB#2(β-),在我们所预计的1/β断点处增加极点与零点,这通常在β+和β-曲线上较容易实现。 请记住:V FB 越小→β越小→1/β越大 CMOS 放大器与Aol 注意点: 一个关于Aol 和CMOS 的注意点。随着CMOS 放大器输出负载的增加(负载阻值变小),Aol 曲线的直流部分在数值上减小。对如图 5.19所示的OPA364电路,我们看到VOUT 上有一个2M ?的负载。图5.20给出了用这个负载时,对Aol 曲线的Tina SPICE 仿真结果。我们注意到图 5.20中的直流Aol 值在10Hz 时扩大到大约118dB ,这与图5.15中的数据资料Aol 曲线不相符。 V O U T 图5.19:OPA364 Aol 测试电路w/Load = 2M ? T 图5.20:OPA364 Aol w/Load = 2M ? 图5.21所示电路在OPA364的输出上加了10k ? 的负载。这是在OPA364数据资料Aol 曲线中给定的。我们对负载为10k ? 的OPA364(图5.22)所进行的Tina SPICE 仿真结果与数据资料Aol 曲线相符。因此,在单电源缓冲器Tina SPICE 分析中,所给出的未加负载的OPA364 Aol 曲线也是正确的。因此这个OPA364 SPICE 模型准确地模拟了OPA364 CMOS 放大器在实际电路中的行为,即低频情况下输出负载改变时Aol 的变化。 Frequency (Hz) G a i n (d B ) V O U T 图5.21:OPA364 Aol 测试电路w/Load = 10K ?(数据资料Aol 曲线) T 图5.22:OPA364 Aol w/Load = 10k ?(数据资料Aol 曲线) 图字:OPA364 Aol 曲线、数据资料负载、Load=10k ?、增益、频率 最终缓冲器分析: 现在我们将用如图5.23所示电路来对我们的补偿缓冲放大器电路进行Tina SPICE 分析。通过一个Tina SPICE 交流分析运算,我们能得到图5.23列出的公式所表示的所有感兴趣曲线。 Frequency (Hz) G a i n (d B ) V 1 4.1 图5.23:完整交流分析电路 在图5.24中,我们可以看到OPA364 Aol 曲线和1/β+曲线及1/β-曲线。请注意,正如我们所预计的,在任何给定频率下,1/β曲线的增益比1/β+曲线及1/β-曲线都要低。同样需注意的是,与我们的一阶分析相比,这些Tina SPICE 仿真曲线与我们所预计结果的相符! T 图5.24:Aol 、1/β+、1/β- 与1/β曲线 Frequency (Hz) V o l t a g e (V ) 那么,如果想对我们的稳定性画面进行仔细查看的话,我们可以使用从Tina SPICE 得到的环路增益幅度和相位曲线(见图5.25),从而可详细地查看我们在综合一个稳定的统一增益缓冲电路中的工作。我们的一个目的是避免相位余量在频率小于fcl 时降低到45度以下。我们的结果不错,但在300kHz 附近稍微下降到了45度以下,从那以后相位余量上升直至超出频率范围。 图5.25:环路增益 (Aol β) 幅度与相位曲线 图5.26所示电路将被用来预测及仿真VOUT/VIN 的交流闭环传输函数。 T Frequency (Hz) G a i n (d B ) Frequency (Hz)P h a s e [d e g ] V 1 4.1V IN 图字:V OUT/V IN交流响应:VOUT/VG1 曲线以用于闭环交流响 VOUT与VIN相 X C1/R2的存在,VOUT/VIN ( Frequency (Hz) G a i n ( d B ) -60 -40 -20 20 40 60 80 100 120 图5.27:1阶VOUT / VIN分析 图字:从直流到fpx: OPA364充当一个带有积分器功能的误差放大器。V OUT/V IN=0dB fpx处: X C1/R2=1 fpx 到 fpy: 由于X C1/R2,V OUT/V IN继续以-20db/decade下降 >fpy: 由于没有余下环路增益(Aolβ=0)可用来校正误差,因此V OUT/V IN随Aol下降 图5.28给出了用Tina SPICE仿真得到的VOUT/VIN结果,该结果也表明它与我们从一阶分析得到的预测一致。我们还注意到,我们达到了缓冲放大器电路100kHz小信号带宽的最初目标。 -80 -100 OPA364 acts as error amp with integrator function. V OUT/V IN= 0dB X C1/R2 =1 V OUT/V IN continues down @ -20db/decade due to X C1/ R2. V OUT/V IN follows down Aol curve since no loop gain left to correct for errors (Aolβ=0). DC to fpx: At fpx: fpx to fpy: > fpy: T Frequency (Hz) G a i n (d B ) Frequency (Hz) P h a s e [d e g ] 图5.28:VOUT / VIN SPICE 仿真结果 图字:VOUT/VIN 交流传输函数幅度曲线 VOUT/VIN 交流传输函数相位曲线 现在,让我们根据实际的稳定性测试,在Tina SPICE 上运行一个瞬态分析测试来查看过冲与振铃现象。图5.29给出了该电路。 V IN V OUT 图5.29:瞬态稳定性测试电路 图字:V /V 瞬态响应:V /V 从Tina SPICE 瞬态分析得到如图5.30所示的结果,表明VOUT 没有表现出过大的过冲和振铃,这是我们从环路稳定性分析中所预计到的。此外,我们还监测了在快速200mV 阶跃变化时(从4V 升至4.2V ,又返回)从 OPA364流入和流出的电流。这里,也没有产生过大的电流尖峰,我们可以预计,我们现在的缓冲放大器电路运行良好、耐用、稳定、真实且具有统一增益。 T Time (s)0.00100.00u 200.00u 300.00u 400.00u AM1-192.50u 26.96u VM 3.99 4.21 VOA 4.114.23VOUT 3.99 4.21Vin 4.004.20 图5.30:瞬态稳定性测试SPICE 结果 但等一等,这还不是全部。我们还在实验室实际电路中增加了稳定性网络,并对它进行了瞬态稳定性测试,结果如图5.31所示。真是令人愉快的成功!我们从使用一阶分析,到使用Tina SPICE 仿真,再到最后使用实际电路稳定性测试,都证实了我们的缓冲放大电路是稳定的。我们的分析与综合技术证明是行之有效的,它得到了一种稳定、可靠、单电源、大电流的缓冲放大器电路。 VIN VOUT 图5.31:“实际瞬态稳定性测试结果” –––– 缓冲器拓扑 w/o 补偿 关于共模反馈环路稳定性的考虑Return To Innocence 在全差分运放的设计中,通常共模反馈的环路会比主运放的级数要多,这时共模反馈环路中多个极点会影响环路的稳定性,这里试着对此问题做些分析 下图是一个简单的两级全差分放大器,其中的cmfb部分利用两个VCVS得到输出信号的共模,再与输入的Vcmo比较得到cmfb的反馈控制信号。 考虑共模反馈环路,其中存在3个极点,包括运放第一级的输出极点、第二级的输出极点以及cmfb节点对应的极点。与分析运放稳定性问题一样,前两者分别为主极点和次主极点,对于第3个极点,由于其阻抗和输出极点一样在1/gm 量级(实际上,为消除系统失调,运放输出共源放大的mos 管和cmfb的二极管连接的mos管有相同的过驱动电压,其gm按w/l成比例),不能简单的忽略。 实际上,这个cmfb的极点与上图中P管的特征频率ft相关,为此我们需要为其选择一个合适的过驱动电压Vov:首先Vov不能太低,这样才能以保证其ft在足够高的频率,以避免cmfb极点对环路的作用;同时这Vov也不能太高,他必须提供一定的gm/Id,保证运放输出级在电流一定的条件下 有足够的gm,从而避免运放输出极点频率的下降。 上面是对利用理想VCVS得到输出共模的方式下的一些分析,下面我们看看实际的得到输出共模电路中的问题。 以电阻方式等到输出信号的共模电平是一种常见的方法,如果忽略前面电路的输出阻抗,cm-sense的电阻Rs和之后的共模比较电路的栅节点电容Cx会在共模反馈的环路中引入一个极点。考虑到一般Rs至少要在Rds量级以避免其对运放增益的衰减,这位个极点的位置不会太高,因此必须加以考虑。实际中,可通过在电阻Rs上并联电容Cs来减小这一极点的影响。 在上面的电路中, 通过简单的分析, 可以得到: 引入Cs 之后, 由cm-sense 部分引入的零极点为: Po=1/(Rs*(Cs+Cx)), Zo=1/(Rs*Cs), 即在极点之后补了一个零点来抵消其作用. 至于具体的Cs 的取值, 考虑Cs 至少与Cx 比较接近, cmfb 环路才能得到一定的相位裕度, 若进一步考虑零极点对建立时间的影响, 应该将Cs/Cx 取为一定值以上才能将零极点拉的足够近, 以减小这一零极点对对共模信号建立时间的影响。 2 您可能也喜欢: 系统稳定性意义以及稳定性的几种定义 一、引言: 研究系统的稳定性之前,我们首先要对系统的概念有初步的认识。 在数字信号处理的理论中,人们把能加工、变换数字信号的实体称作系统。由于处理数字信号的系统是在指定的时刻或时序对信号进行加工运算,所以这种系统被看作是离散时间的,也可以用基于时间的语言、表格、公式、波形等四种方法来描述。从抽象的意义来说,系统和信号都可以看作是序列。但是,系统是加工信号的机构,这点与信号是不同的。人们研究系统还要设计系统,利用系统加工信号、服务人类,系统还需要其它方法进一步描述。描述系统的方法还有符号、单位脉冲响应、差分方程和图形。 电路系统的稳定性是电路系统的一个重要问题,稳定是控制系统提出的基本要求,也保证电路工作的基本条件;不稳定系统不具备调节能力,也不能正常工作,稳定性是系统自身性之一,系统是否稳定与激励信号的情况无关。对于线性系统来说可以用几点分布来判断,也可以用劳斯稳定性判据分析。对于非线性系统的分析则比较复杂,劳斯稳定性判据和奈奎斯特稳定性判据受到一定的局限性。 二、稳定性定义: 1、是指系统受到扰动作用偏离平衡状态后,当扰动消失,系统经过自身调节能否以一定的准确度恢复到原平衡状态的性能。若当扰动消失后,系统能逐渐恢复到原来的平衡状态,则称系统是稳定的,否则称系统为不稳定。 稳定性又分为绝对稳定性和相对稳定性。 绝对稳定性。如果控制系统没有受到任何扰动,同时也没有输入信号的作用,系统的输出量保持在某一状态上,则控制系统处于平衡状态。 (1)如果线性系统在初始条件的作用下,其输出量最终返回它的平衡状态,那么这种系统是稳定的。 (2)如果线性系统的输出量呈现持续不断的等幅振荡过程,则称其为临界稳定。(临界稳定状态按李雅普洛夫的定义属于稳定的状态,但由于系统参数变化等原因,实际上等幅振荡不能维持,系统总会由于某些因素导致不稳定。因此从工程应用的角度来看,临界稳定属于不稳定系统,或称工程意义上的不稳定。) (3)如果系统在初始条件作用下,其输出量无限制地偏离其平衡状态,这称系统是不稳定的。 实际上,物理系统的输出量只能增大到一定范围,此后或者受到机械制动装置的限制,或者系统遭到破坏,也可以当输出量超过一定数值后,系统变成非线性的,从而使线性微分方程不再适用。因此,绝对稳定性是系统能够正常工作的前提。 运放稳定性分析 环路稳定性基础 引言 本系列所采用的所有技术都将“以实例来定义”,而不管它在其他应用中能否用普通公式来表达。为便于进行稳定性分析,我们在工具箱中使用了多种工具,包括数据资料信息、技巧、经验、SPICE仿真以及真实世界测试等,都将用来加快我们的稳定运放电路设计。尽管很多技术都适用于电压反馈运放,但上述这些工具尤其适用于统一增益带宽小于20MHz的电压反馈运放。选择增益带宽小于20MHz的原因是,随着运放带宽的增加,电路中的其他一些主要因素会形成回路,如印制板(PCB) 上的寄生电容、电容中的寄生电感以及电阻中的寄生电容与电感等。我们下面介绍的大多数经验与技术并非仅仅是理论上的,而且是从利用增益带宽小于20MHz的运放、实际设计并构建真实世界电路中得来的。 本系列的第1部分回顾了进行稳定性分析所需的一些基本知识,并定义了将在整个系列中使用的一些术语。 波特图(曲线)基础 幅度曲线的频率响应是电压增益改变与频率改变的关系。这种关系可用波特图上一条以分贝(dB) 来表示的电压增益比频率(Hz) 曲线来描述。波特幅度图被绘成一种半对数曲线:x轴为采用对数刻度的频率(Hz)、y轴 则为采用线性刻度的电压增益(dB) ,y轴最好是采用方便的每主格45°刻度。波特图的另一半则是相位曲线(相移比频率),并被描绘成以“度”来表示的相移比频率关系。波特相位曲线亦被绘成一种半对数曲线:x轴为采用对数刻度的频率(Hz)、y轴为采用线性刻度的相移(度),y轴最好是采用方便的每主格45°刻度。 幅度波特图要求将电压增益转换成分贝(dB) 。进行增益分析时,我们将采用以dB(定义为20Log10A)表示的电压增益,其中A为以伏/伏表示的电压增益。 5.5 生态系统的稳定性 【学习目标】 1.阐明生态系统的自我调节能力。2.举例说明抵抗力稳定性和恢复力稳定性。 3.简述提高生态系统稳定性的措施。 4.设计并制作生态缸,观察其稳定性。 5.认同生态 系统稳定性的重要性,关注人类活动对生态系统稳定性的影响。 【自主学习讨论】 一、生态系统的自我调节能力 1.生态系统的稳定性 ⑴概念:生态系统所具有的自身结构和功能相对稳定的。 ⑵原因:生态系统具有。 2.生态系统的自我调节能力 ⑴实例:。 ⑵基础:调节。 ⑶调节限度:生态系统自我调节能力是的,当外界干扰因素的强度超过一定限度时,生态系统的自我调节能力会迅速丧失,这样,生态系统难以恢复。 二、抵抗力稳定性和恢复力稳定性 1.抵抗力稳定性 ⑴概念:生态系统抵抗外界干扰并使自身的结构与功能 (不受损害)的能力。 ⑵规律:生态系统中的组分越多,食物网越,其自我调节能力就,抵抗力稳定性就。 2.恢复力稳定性 ⑴概念:生态系统在受到外界干扰因素的破坏后的能力。 ⑵特点:生态系统在受到不同的干扰(破坏)后,其恢复速度与恢复时间是。 三、提高生态系统的稳定性 1.控制对生态系统的,对生态系统的利用应适度,不应超过生态系统的自我调节能力。 2.对人类利用强度较大的生态系统,应实施相应的的投入,保证生态系统内部的协调。 四、设计并制作生态缸及观察其稳定性 1.制作小生态缸的目的:探究生态系统保持相对稳定的条件。 1.生态系统的自我调节能力主要取决于() A.生产者B.营养结构的复杂程度C.分解者D.非生物的物质和能量2.在下列4种措施中能提高区域生态系统自我调节能力的是() A.减少该生态系统内捕食者和寄生生物的数量 B.增加该生态系统内各营养级生物的种类 C.使该生态系统内生产者和消费者在数量上保持平衡 D.减少该生态系统内生物种类 3.如果将一处原始森林开辟为一个森林公园,为了继续维持森林生态系统的稳定性,应当采取的措施是() 运放稳定性 第1部分(共15部分):环路稳定性基础 作者:Tim Green ,TI 公司Burr-Brown 产品战略发展经理 1.0 引言 本系列所采用的所有技术都将“以实例来定义”,而不管它在其他应用中能否用普通公式来表达。为便于进行稳定性分析,我们在工具箱中使用了多种工具,包括数据资料信息、技巧、经验、SPICE 仿真以及真实世界测试等,都将用来加快我们的稳定运放电路设计。尽管很多技术都适用于电压反馈运放,但上述这些工具尤其适用于统一增益带宽小于20MHz 的电压反馈运放。选择增益带宽小于20MHz 的原因是,随着运放带宽的增加,电路中的其他一些主要因素会形成回路,如印制板 (PCB) 上的寄生电容、电容中的寄生电感以及电阻中的寄生电容与电感等。我们下面介绍的大多数经验与技术并非仅仅是理论上的,而且是从利用增益带宽小于20MHz 的运放、实际设计并构建真实世界电路中得来的。 本系列的第1部分回顾了进行稳定性分析所需的一些基本知识,并定义了将在整个系列中使用的一些术语。 9Data Sheet Info 9Tricks 9Rules-Of-Thumb 9 9 Testing Goal:EASILY Tricks & Rules-Of-Thumb apply for Voltage Feedback Op Amps, Unity Gain Bandwidth <20MHz To learn how to analyze and design Op Amp circuits for guaranteed Loop Stability using Data Sheet Info, Tricks, Rules-Of-Thumb, Tina SPICE Simulation, and Testing.Note: 图1.0 稳定性分析工具箱 图字(上、下): 数据资料信息、技巧、经验、Tina SPICE 仿真、测试; 目的:学习如何用数据资料信息、技巧、经验法则、Tina SPICE 仿真及测试来“更容易地”分析和设计运放,以确保环路稳定性; 注:用于统一增益带宽小于20MHz 的电压反馈运放的技巧与经验法则。 1.1 波特图(曲线)基础 幅度曲线的频率响应是电压增益改变与频率改变的关系。这种关系可用波特图上一条以分贝 (dB) 来表示的电压增益比频率 (Hz) 曲线来描述。波特幅度图被绘成一种半对数曲线:x 轴为采用对数刻度的频率 (Hz)、y 轴则为采用线性刻度的电压增益 (dB) ,y 轴最好是采用方便的每主格45°刻度。波特图的另一半则是相位曲线(相移比频率),并被描绘成以“度”来表示的相移比频率关系。波特相位曲线亦被绘成一种半对数曲线:x 轴为采用对数刻度的频率 (Hz)、y 轴为采用线性刻度的相移(度),y 轴最好是采用方便的每主格45°刻度。 普通高中课程标准实验教科书—生物第三册[人教版] 第5节生态系统的稳定性 一、知识结构 抵抗力稳定性 生态系统的稳定性 恢复力稳定性 二、教学目标 1、阐明生态系统的自我调节能力。 2、举例说明抵抗力稳定性和恢复力稳定性。 3、简述提高生态系统稳定性的措施。 4、设计并制作生态缸,观察其稳定性。 5、认同生态系统稳定性的重要性,关注人类活动对生态系统稳定性的影响。 三、教学重点、难点及解决方法 1、教学重点及解决方法 [教学重点] 阐明生态系统的自我调节能力。 [解决方法] 以具体的实例来说明生物群落内部负反馈调节的存在,进而阐明生态系统的自我调节能力。 2、教学难点及解决方法 [教学难点] 抵抗力稳定性和恢复力稳定性的概念。 [解决方法] 通过生态系统的自我调节能力的教学,已为学生理解抵抗力稳定性和恢复力稳定性的概念打下了伏笔,再借实例说明之。 四、课时安排 2课时。 五、教学方法 讲解法。 六、教具准备 图片、动画。 七、学生活动 1、问题探讨、思考与讨论。 2、设计并制作生态缸。 八、教学程序 (一)明确目标 (二)重点、难点的学习与目标完成过程 第1课时 导入:[问题探讨]教材P109,引导学生从群落的种间关系,生态系统的结构与功能讨论生态系统具有稳定性;再设问:“人类能否在生物圈之外建造一个适于人类长期生活的生态系统呢?”引出“生物圈2号”实验,引导学生思考生物圈2号失败的原因。上述正反两个实例,可以说明自然界中生态具有相对稳定性,稳定的生态系统对于生物生存至关重要。那 么,什么是生态系统的稳定性呢? 学生阅读教材P109相关内容。教师指出:只有生态系统发展到一定阶段,它的生产者、消费者和分解者三大功能类群齐全,能量的输入保持稳定,物质的输入和输出相对平衡时才表现出来。稳定性表现在结构相对稳定和功能相对稳定上。例如,原始森林生态系统是经过千百年来形成的,尽管其中的生物生生死死,迁入迁出,无机环境也不断变化,但从某一阶段来看,该系统内各种生物的种类和数量总是大体相同的。生态系统的稳定性指的是生态系统的一种能力或特性,而不是一种状态。它包括抵抗力稳定性和恢复力稳定性两个方面。 设问:为什么生态系统具有稳定性? 学生阅读教材P109——110相关内容,动画模拟演示兔种群与植物种群之间的负反馈示意图。设置下列问题: 1、草原中生活着野兔和狼,由于狼的捕食,野兔数量减少,分析草、野兔、狼的种群数量是如何逐步达到稳定的? 2、为什么森林中害虫数量不会持续大幅度增长? 3、适度捕捞后,池塘中鱼的种群数量为什么不会减少? 4、森林局部大火过后,为什么植株能较快生长? 5、生态系统的自我调节能力是无限的吗? 教师总结归纳。 学生阅读教材P110——111相关内容,思考回答下列问题: 1、什么是抵抗力稳定性和恢复力稳定性? 2、抵抗力稳定性和恢复力稳定性的核心分别是什么? 3、草原、北极苔原、森林生态系统,抵抗力稳定性谁强谁弱?恢复力稳定性谁高谁低? 4、抵抗力稳定性与生态系统自身的组分和营养结构关系如何?恢复力稳定性呢? 5、抵抗力稳定性与恢复力稳定性关系如何? 教师总结归纳:“抵抗力稳定性”要强调其核心是“抵抗干扰,保持原状”。“干扰”是指破坏稳定状态的外界因素;“保持”是指与干扰同时表现的系统内在的自动调节能力。“恢复力稳定性”要强调其核心是“遭到破坏,恢复原状”。“破坏”是指受外界因素影响使生态系统较远地偏离了原来的稳定范围;“恢复”是指外界因素消除了,生态系统重新建立稳定状态。 1、自动调节能力取决于生态系统自身的净化作用和完善的营养结构。净化作用包括物理沉降、化学分解和微生物的分解三个方面,它是河流生态系统抵抗环境污染的有效途径。 完善的营养结构使生态系统具有一种反馈调节机制,进而抵抗外界干扰,维持自身稳定。反馈调节是生态系统自动调节能力的基础,如在森林中,当害虫数量增加时,食虫鸟类由于食物丰富,数量也会增加,害虫种群数量增加时,食虫鸟类由于食物丰富,数量也会增加,害虫种群的增长就会受到抑制。生态系统的自动调节主要依靠群落内种间关系(主要是捕食)和种群内的种内斗争而实现的。 2、自动调节能力与生态系统成分和营养结构的关系 生态系统的自动调节能力与其自身的成分和营养结构成正比。一般来说,生态系统的成分越单纯,营养结构越简单,自动调节能力就越小,反之就越大。 3、生态系统的自动调节能力与抵抗力稳定性的关系 生态系统抵抗力稳定性的强弱取决于自动调节能力的大小,它们之间呈正相关,即生态系统的抵抗力稳定性与其自身的成分和营养结构的复杂程度成正比关系。 4、生态系统的自动调节能力与恢复力稳定性的关系 生态系统的自动调节能力是有限度的,当外界干扰超过了这一限度时,生态系统原有的稳定性遭到破坏,抵抗力稳定性不能发挥作用于,恢复力稳定性得以充分体现,最终使其恢 多级运算放大器的频率补偿分析 Bo yang 2009-5-3 由于单级运算放大器cascode不能满足低电压的要求,而且短沟道效应和深亚微米CMOS的本征增益下降,所以要使用多级放大,这样就涉及到频率补偿的问题。大部分的频率补偿拓扑结构都是采用极点分离和零极点抵消技术(使用电容和电阻)。对于两级运算放大器而言这样的补偿无论是在理论分析还是在实际电路中都是可行的,但是对于多级放大器而言,要考虑的因素很多(电容面积,功耗,压摆率等)。而且理论的分析不一定都适用于实际的电路。所以对于多级放大器的频率补偿,这里给出了几种拓扑结构。 由于系统结构,传输函数都很复杂,所以在分析这些拓扑结构之前先给出一些假设条件:1):假设每一级的增益都远远大于1; 2):假设负载电容和补偿电容都大于寄生集总电容; 3):每一级之间的寄生电容忽略不计。 以上这些假设都是很容易满足,而且在大部分电路中都是满足这些条件条件的。 一single stage 对于单级放大器而言,其频率响应比较好,只有一个左半平面得极点,没有零点,所以 整个系统是稳定的。极点位置为:。其增益带宽积为GBW=gmL/CL.所以可以通过增大跨导,减小输出电容的方式来增大带宽。实际上它的相位裕度没有90度,是因为存在着寄生的零极点。二这些寄生的零极点于信号路径上的偏置电流和器件的尺寸有关,所以单位增益带宽也不能无限制的增加,而是等于寄生最小极点或者零点的一半为比较合适的,而且大的偏置电流和小的器件尺寸对于稳定性是必要的 二 two stage 对于两级的运放,就是采用简单的米勒补偿(SMC)。其补偿的结构如下所示: 对于这种结构的传递函数可以表述如下 从传递函数中很容易知道零极点位置。其中一个右半平面得零点和两个极点。为了保证系统稳定性,次极点和零点要在比单位增益频率大的地方,这样就要求Cm很大并把主极点推的很低,这样增益带宽积就要减小,要保持同样的速度即单位增益带宽,就要求大的功耗(增加跨导)通常选择次极点在单位增益频率两倍的位置。同时在这里要注意一点的是,零点的位置一定要比次级点位置高,要不就会出现稳定性问题。为了维持系统稳定,次级点 是GBW的1/2。所以。同样则有通过以上两个关系式不难发现,GBW并不随第一级的跨导的增大而增大,因为补偿电容也在同比增大。所以,要增大GBW 就要增大第二级跨导和减小输出电容。 第5节生态系统的稳定性 一、知识结构 抵抗力稳定性 生态系统的稳定性 恢复力稳定性 二、教学目标 1、阐明生态系统的自我调节能力。 2、举例说明抵抗力稳定性和恢复力稳定性。 3、简述提高生态系统稳定性的措施。 4、设计并制作生态缸,观察其稳定性。 5、认同生态系统稳定性的重要性,关注人类活动对生态系统稳定性的影响。 三、教学重点、难点及解决方法 1、教学重点及解决方法 [教学重点] 阐明生态系统的自我调节能力。 [解决方法] 以具体的实例来说明生物群落内部负反馈调节的存在,进而阐明生态系统的自我调节能力。 2、教学难点及解决方法 [教学难点] 抵抗力稳定性和恢复力稳定性的概念。 [解决方法] 通过生态系统的自我调节能力的教学,已为学生理解抵抗力稳定性和恢复力稳定性的概念打下了伏笔,再借实例说明之。 四、课时安排 2课时。 五、教学方法 讲解法。 六、教具准备 图片、动画。 七、学生活动 1、问题探讨、思考与讨论。 2、设计并制作生态缸。 八、教学程序 (一)明确目标 (二)重点、难点的学习与目标完成过程 第1课时 导入:[问题探讨]教材P109,引导学生从群落的种间关系,生态系统的结构与功能讨论生态系统具有稳定性;再设问:“人类能否在生物圈之外建造一个适于人类长期生活的生态系统呢?”引出“生物圈2号”实验,引导学生思考生物圈2号失败的原因。上述正反两个实例,可以说明自然界中生态具有相对稳定性,稳定的生态系统对于生物生存至关重要。那么,什么是生态系统的稳定性呢? 学生阅读教材P109相关内容。教师指出:只有生态系统发展到一定阶段,它的生产者、消费者和分解者三大功能类群齐全,能量的输入保持稳定,物质的输入和输出相对平衡时才表现出来。稳定性表现在结构相对稳定和功能相对稳定上。例如,原始森林生态系统是经过千百年来形成的,尽管其中的生物生生死死,迁入迁出,无机环境也不断变化,但从某一阶段来看,该系统内各种生物的种类和数量总是大体相同的。生态系统的稳定性指的是生态系统的一种能力或特性,而不是一种状态。它包括抵抗力稳定性和恢复力稳定性两个方面。 设问:为什么生态系统具有稳定性? 学生阅读教材P109——110相关内容,动画模拟演示兔种群与植物种群之间的负反馈示意图。设置下列问题: 1、草原中生活着野兔和狼,由于狼的捕食,野兔数量减少,分析草、野兔、狼的种群数量是如何逐步达到稳定的? 2、为什么森林中害虫数量不会持续大幅度增长? 3、适度捕捞后,池塘中鱼的种群数量为什么不会减少? 4、森林局部大火过后,为什么植株能较快生长? 5、生态系统的自我调节能力是无限的吗? 教师总结归纳。 学生阅读教材P110——111相关内容,思考回答下列问题: 1、什么是抵抗力稳定性和恢复力稳定性? 2、抵抗力稳定性和恢复力稳定性的核心分别是什么? 3、草原、北极苔原、森林生态系统,抵抗力稳定性谁强谁弱?恢复力稳定性谁高谁低? 4、抵抗力稳定性与生态系统自身的组分和营养结构关系如何?恢复力稳定性呢? 5、抵抗力稳定性与恢复力稳定性关系如何? 教师总结归纳:“抵抗力稳定性”要强调其核心是“抵抗干扰,保持原状”。“干扰”是指破坏稳定状态的外界因素;“保持”是指与干扰同时表现的系统内在的自动调节能力。“恢复力稳定性”要强调其核心是“遭到破坏,恢复原状”。“破坏”是指受外界因素影响使生态系统较远地偏离了原来的稳定范围;“恢复”是指外界因素消除了,生态系统重新建立稳定状态。 1、自动调节能力取决于生态系统自身的净化作用和完善的营养结构。净化作用包括物理沉降、化学分解和微生物的分解三个方面,它是河流生态系统抵抗环境污染的有效途径。 完善的营养结构使生态系统具有一种反馈调节机制,进而抵抗外界干扰,维持自身稳定。反馈调节是生态系统自动调节能力的基础,如在森林中,当害虫数量增加时,食虫鸟类由于食物丰富,数量也会增加,害虫种群数量增加时,食虫鸟类由于食物丰富,数量也会增加,害虫种群的增长就会受到抑制。生态系统的自动调节主要依靠群落内种间关系(主要是捕食)和种群内的种内斗争而实现的。 2、自动调节能力与生态系统成分和营养结构的关系 生态系统的自动调节能力与其自身的成分和营养结构成正比。一般来说,生态系统的成分越单纯,营养结构越简单,自动调节能力就越小,反之就越大。 3、生态系统的自动调节能力与抵抗力稳定性的关系 生态系统抵抗力稳定性的强弱取决于自动调节能力的大小,它们之间呈正相关,即生态系统的抵抗力稳定性与其自身的成分和营养结构的复杂程度成正比关系。 4、生态系统的自动调节能力与恢复力稳定性的关系 生态系统的自动调节能力是有限度的,当外界干扰超过了这一限度时,生态系统原有的稳定性遭到破坏,抵抗力稳定性不能发挥作用于,恢复力稳定性得以充分体现,最终使其恢复接近原状或代之以另一全新的生态系统,并且重新具备抵抗力稳定性,又表现出自动调节 典型的两级运算放大器环路稳定性分析 典型的两级运放如图所示,负载电容CL=50fF。 首先建立静态工作点。加偏置电流I0=4uA,加共模输入电平1.25V。仿真后得到结果如下,静态工作点是合适的。 1.开环分析 米勒补偿前做开环分析如下,显然,这是不合适的。 加米勒补偿电容Cc=200fF,做开环分析如下,显然,这也是不合适的。这是由于电路中存在零点造成的。 加入调零电阻Rz=40K,,仿真结果如下。可以看出,, ,相位裕度为40度,不够。可通过加大补偿电容来进一步分裂p1,p2主次极 点。(已尝试过加米勒补偿电容Cc=300fF可以得到大于60度的相位裕度)。但是本次设计的运放用在负反馈环路中,故只需要负反馈环路是稳定的就达到设计标准。 理论计算。 查看各管子的静态工作点。 ,,,即。 ,,,即 。 , 。理论值与仿真结果非常接近。 ,理论值与仿真结果非常接近。 , ,理论值与仿真结果非常接近。 , ,理论值 与仿真结果40度偏差较大。 2.在负反馈环路中做环路稳定性分析: 从上图可以看出,加入反馈电阻网络R1,R2后就打破了原有的静态工作点:主要是反馈电阻网络R1,R2中的电流由M7管提供,所以M7管的静态工作点打破了,即运放的第二级跨导GmⅡ,输出电阻R2都变了。从波特图中可以看出相位裕度为77度,满足设计标准。理论计算: 查看各管子的静态工作点。 ,, ,即。 ,,,即 。 , 。理论值与仿真结果非常接近。 ,理论值与仿真结果非常接近。 。 ,理论值与仿真结果非常接近。 , ,理论值 与仿真结果77度偏差较大。 此结果可能是由于gm7变大,原来的调零电阻RZ过大造成的。现在改变调零电阻Rz=25K, ,仿真结果如下: 此时,相位裕度为63度,满足设计标准。 3.改用大电感大电容仿真环路增益: 讨论电容对运放稳定性的影响 今天我们来学习电容对运放稳定性的影响,这是最后一部分内容,之后还有两次总结和回顾就结束了运放提高课的全部内容,感觉还有点意犹未尽。下面我们先来看一下输出电容对稳定性影响,上节课提到,当运放接成跟随器的形式的时候,其相应的相角裕度将会比较小,稳定性比较差,如果输出端再接一个100pF或50pF的电容将会使运放的稳定性变差,由于运放内部是由三级构成,输入级、放大级和驱动级,这里每一级的输出都会经电阻和电容的并联接地,根据第二十集的内容我们知道,电阻和电容的并联会产生一个极点,所以输入级、放大级和驱动级的电阻和电容都会引入一个极点,其中放大级极点为低频极点,输入级极点为高频极点,驱动级极点介于两者之间,而运放输出端再接一个电容时,就会使得驱动级极点频率降低,从而使得相角提前到达-180度,使得相角裕度变小,从而使得稳定性变差。 而相应的解决办法有两种,一是通过与输出电容并联一个电阻来解决,通过并联电阻使得驱动级极点频率增加,但是这里有一个问题,并联电阻将成为负载要分得一部分电流。另一种方法,如下图所示,输出经过电阻再经电容接地,这同样会带来问题,会有电流流过该电阻使得电阻将分得一部分电压使得运放输出端和电容电压不同,需要电阻的阻值很小。 至于为什么串联电阻会解决该问题,这要回到我们之前学过的内容,它虽然没有改变该极点,但是它又引入了一个零点,从而会抵消该极点的作用,使得相位在没有到达-180度之前再回到-90度。 接下来再看一下输入级电容对运放稳定性的影响,下图为同相放大器,并在反相输入端经电容接地。 再对反馈环节进行分析,得到其反馈环节为一阶系统,之前提到过,运放可以等效为理想 关于共模反馈环路稳定性的考虑 | Return To Innocence 收藏人:mzsm 2014-10-13 | 阅:转:| 来源| 分享 在全差分运放的设计中,通常共模反馈的环路会比主运放的级数要多,这时共模反馈环路中多个极点会影响环路的稳定性,这里试着对此问题做些分析 下图是一个简单的两级全差分放大器,其中的cmfb部分利用两个VCVS得到输出信号的共模,再与输入的Vcmo比较得到cmfb的反馈控制信号。 考虑共模反馈环路,其中存在3个极点,包括运放第一级的输出极点、第二级的输出极点以及cmfb节点对应的极点。与分析运放稳定性问题一样,前两者分别为主极点和次主极点,对于第3个极点,由于其阻抗和输出极点一样在1/gm量级(实际上,为消除系统失调,运放输出共源放大的mos管和cmfb的二极管连接的mos管有相同的过驱动电压,其gm按w/l成比例),不能简单的忽略。 实际上,这个cmfb的极点与上图中P管的特征频率ft相关,为此我们需要为其选择一个合适的过驱动电压Vov:首先Vov不能太低,这样才能以保证其ft在足够高的频率,以避免cmfb极点对环路的作用;同时这Vov也不能太高,他必须提供一定的gm/Id,保证运放输出级在电流一定的条件下有足够的gm,从而避免运放输出极点频率的下降。 上面是对利用理想VCVS得到输出共模的方式下的一些分析,下面我们看看实际的得到输出共模电路中的问题。 以电阻方式等到输出信号的共模电平是一种常见的方法,如果忽略前面电路的输出阻抗, cm-sense的电阻Rs和之后的共模比较电路的栅节点电容Cx会在共模反馈的环路中引入一个极点。考虑到一般Rs至少要在Rds量级以避免其对运放增益的衰减,这位个极点的位置不会太高,因此必须加以考虑。实际中,可通过在电阻Rs上并联电容Cs来减小这一极点的影响。 ●Hello,and welcome to the TI Precision Lab supplement for op amp stability. ●This lab will walk through detailed calculations,SPICE simulations,and real-world measurements that greatly help to reinforce the concepts established in the stability video series. ●你好,欢迎来到TI Precision Labs(德州仪器高精度实验室)的运放稳定 性环节。 ●这个实验会包括计算,SPICE仿真和实际测试。这些环节帮助大家对视频中 的概念加深理解。 ●The detailed calculation portion of this lab can be done by hand,but calculation tools such as MathCAD or Excel can help greatly. ●The simulation exercises can be performed in any SPICE simulator,since Texas Instruments provides generic SPICE models of the op amps used in this lab. However,the simulations are most conveniently done in TINA-TI,which is a free SPICE simulator available from the Texas Instruments website.TINA simulation schematics are embedded in the presentation. ●Finally,the real-world measurements are made using a printed circuit board,or PCB,provided by Texas Instruments.If you have access to standard lab equipment,you can make the necessary measurements with any oscilloscope, function generator,Bode plotter,and±15V power supply.However,we highly recommend the VirtualBench from National Instruments.The VirtualBench is an all-in-one test equipment solution which connects to a computer over USB or Wi-Fi and provides power supply rails,analog signal generator and oscilloscope channels,and a5?digit multimeter for convenient and accurate measurements. This lab is optimized for use with the VirtualBench. ●本实验的计算可以通过實際計算,如果使用Mathcad或者Excel这样工具会 更好。 环路相位-开关电源稳定性设计 专业技术 环路相位-开关电源稳定性设计 摘要:环路,相位,增益,负载,开关电源,稳定性,电压,相移,电源,频率, 信号接收机-基于单芯片的GPS接收机硬件设计白光调光-白光和彩色光智能照明系统解决方案设备方案-台达UPS在中小企业中的创新应用方案触摸屏电容-电容式触摸屏系统解决方案测量肺活量-利用高性能模拟器件简化便携式医疗设备设计测量温度-热敏电阻(NTC)的基本参数及其应用动能产品-动能电子企业文化活动丰富员工生活电路板镀锡-无锡华文默克发布PCB/SMT工艺方案引擎电压-采用接近传感器的火花探测器太阳能控制器-太阳能LED街灯的挑战及安森美半导体高能效解决方案众所周知,任何闭环系统在增益为单位增益l,且内部随频率变化的相移为360°时,该闭环控制系统都会存在不稳定的可能性。因此几乎所有的开关电源都有一个闭环反馈控制系统,从而能获得较好的性能。在负反馈系统中,控制放大器的连接方式 有意地引入了180°相移,如果反馈 众所周知,任何闭环系统在增益为单位增益l,且内部随频率变化的相移为360°时,该闭环控制系统都会存在不稳定的可能性。因此几乎所有的开关电源都有一个闭环反馈控制系统,从而能获得较好的性能。在负反馈系统中,控制放大器的连接方式有意地引入了180°相移,如果反馈的相位保持在180°以内,那么控制环路将总是稳定的。当然,在现实中这种情况是不会存在的,由于各种各样的开关延时和电抗引入了额外的相移,如果不采用适合的环路补偿,这类相移同样会导致开关电源的不稳定。 1 稳定性指标衡量开关电源稳定性的指标是相位裕度和增益裕度。相位裕度是指:增益降到0dB 时所对应的相位。增益裕度是指:相位为-180度时所对应的增益大小(实际是衰减)。在实际设计开关电源时,只在设计反激变换器时才考虑增益裕度,设计其它变换器时,一般不使用增益裕度。在开关电源设计中,相位裕度有两个相互独立作用:一是可以阻尼变换器在负载阶跃变化时出现的动态过程;另一个作用是当元器件参数发生变化时,仍然可以保证系统稳定。相位裕度只能用来保证“小信号稳定”。在负载阶跃变化时,电源不可避免要进入“大信号稳定”范围。工程中我们认为在室温和标准输入、正常负载条件下,环路的相位裕度要求大于45°。在各种参数变化和误差情况下,这个相位裕度足以确保系统稳定。如果负载变化或者输入电压范围变化非常大,考虑在所有负载和输入电压下环路和相 运算放大器的稳定性 第4部分(共15部分):环路稳定性主要技巧与经验 作者:Tim Green,TI公司 本系列的第4部分着重讨论了环路稳定性的主要技巧与经验。首先,我们将讨论45度相位及环路增益带宽准则,考察了在Aol 曲线与1/β曲线以及环路增益曲线Aolβ中的极点与零点之间的互相转化关系。我们还将讨论用于环路增益稳定性分析的频率“十倍频程准则”。这些十倍频程准则将被用于1/β、Aol及Aolβ曲线。我们将给出运放输入网络ZI与反馈网络ZF的幅度“十倍频程准则”。我们将开发一种用于在1/β曲线上绘制双反馈路径的技术,并将解释为何在使用双反馈路径时应该避免出现“BIG NOT”这种特殊情况。最后,我们将给出一种便于使用的实际稳定性测试方法。在本系列的第5部分中,这些关键工具的综合使用使我们能够系统而方便地稳定一个带有复杂反馈电路的实际运放应用。 环路增益带宽准则 已确立的环路稳定性标准要求在fcl处相移必须小于180度,fcl是环路增益降为零时的频率。在fcl处的相移与整个180度相移之间的差定义为相位余量。图4.0详细给出了建议用于实际电路的经验,亦即在整个环路增益带宽(f≤fcl)中设计得到135度的相移(对应于45度的相位余量)。这是考虑到,在实际电路中存在着功率上升、下降及瞬态情况,在这些情况下,运放在Aol曲线上的改变可能会导致瞬态振荡。而这种情况在功率运放电路中是特别不希望看到的。由于存在寄生电容与印制板布局寄生效应,因此这种经验还考虑在环路增益带宽中用额外的相位余量来考虑实际电路中的附加相移的。此外,当环路增益带宽中相位余量小于45度时,即可能在闭环传输函数中导致不必要的尖峰。相位余量越低及越靠近fcl,则闭环尖峰就会越明显。 180 135 45 Frequency (Hz) 90 θ -45 -135o Design for: < Loop Stability Criteria:<-180 degree phase shift at fcl -135 degree phase shift at all frequencies 利用Pspice模型分析放大器环路的稳定性 放大器放大器放大器的稳定性,但评估一个较为复杂的电路是否稳定,难度可能会大得多。本文使用常见的Pspice宏模型结合一些简单的电路设计技巧来提高设计工程师的设计能力,以确保其设计的实用性与稳定性。 导致放大器不稳定的原因 在任何相关频率下,只要环路增益不转变为正反馈,则闭环系统稳定。环路增益是一个相量,因而具有幅度和相位特性。环路由理想的负反馈转变为正反馈所带来的额外相移即是最常见的不稳定因素。环路增益相位的“相关”频率,一般出现在环路增益大于或等于0dB之处。 图1:总等效噪声密度-反馈电阻关系曲线。 的放大器电路,通过断开环路,测量信号在环路中传播一次所产生的相移,即可推算出电路的稳定情况。以下例子介绍的方法可利用仿真软件,运算放大器宏模型以及Pspice提供的理想元器件来实现。 图2:跨阻抗放大器。 高速低噪声跨阻放大器(TIA)稳定性示例 我们以一个跨阻放大器(TIA)为例,通过分析其稳定性来阐述我们将要推荐的技术。TIA 广泛应用在工业领域和消费领域,例如LIDAR(光探测和测距)、条形码扫描仪、工厂自动化等。设计工程师遇到的挑战是,在不会造成衰减和老化的情况下,如何最大化信噪比(SNR),以及如何获得足够的速度/带宽来传递所需的信号。图2为采用了LMH6629的放大器示意图,这款超高速(GBWP=4GHz)低噪声(0.69nV/RtHz)器件具有+10V/V的最小稳定增益(COMP 引脚连至VCC)的。LMH6629的补偿(COMP)输入可以连至VEE,从而进一步将最小稳定增益降低到4V/V。 为获得最大的转换速率和带宽(小信号和大信号),在这个例子中,COMP引脚被连接到VCC。可获得的带宽与放大器GBWP直接相关,与跨阻增益(RF)和光电二极管内的寄生电容成反比。确定一个给定放大器所使用的反馈电阻(RF)有一个简单方便的办法:在使用了LMH6629的情况下,总等效输入电流噪声密度“ini”与RF的关系。图中的“in”是LMH6629的输入噪声电流,“en”是LMH6629的输入噪声电压,“k”是波尔兹曼常数,而“T”是用℃表示的绝对温度。 由图1可知,对于LMH6629而言,将RF设定为10k?确保了最小的总等效输入电流噪声密度ini,由此也可以得到最高的SNR。RF的进一步增加会降低可获取的最大速度,而SNR 不会得到明显改善。 是什么使得一个看起来很简单的电路的稳定性分析变得如此复杂呢?主要原因就是寄生元件的影响。在图2的电路中,几乎没有迹象表明这个电路会是不稳定的,图中所示的寄生元件“CD”是光电二极管固有电容,其实际大小由光电二极管的面积和灵敏度来决定。R2用于消除LMH6629的输入偏置电流产生的偏移误差,同时C2消除了R2的噪声。 假设一个光电二极管标称电容(CD)为10pF,图2中电路的仿真响应,由此可以判断出电路是不稳定的:其频率响应曲线中大而尖的峰值即为证明。在频域内,通过了解电路的相位裕度(PM)就可以确定电路的稳定性。为便于仿真,可将光电二极管的电路简化等效为一 [转载]使用运放构成电压跟随器的稳定性问题[转载]使用运放构成电压跟随器的稳定性问题题外话: a: 对于采用负反馈的放大电路,如何减少振荡以保持稳定,目前尚无定论。电压跟随器也不例外。(fig 1.) 运算放大器理想的运行状态是输出电压和输入电压为同相,即,当负输入端的印加电压引起输出增大时,运算放大器能够相应地使增加的电压降低。不过,运算放大器的输入端和输出端的相位总有差异。当输出和输出之间的相位相差180°时,负输入与正输入正好相同,原本应该减少的输出却得到了增强。(成为正反溃的状态。)如果在特定频段陷入这一状态,并且仍然保持原有振幅,那么该输出频率和振荡状态将一直持续下去。 fig 1.电压跟随器和反馈环路 2.输入输出端出现相位差的主要原因 其原因大致可分为两种: 1,由于运算放大器固有的特性 2,由于运算放大器以外的反馈环路的特性 2.1.运算放大器的特性 fig2a及fig2b分别代表性地反映了运算放大器的电压增益—频率特性和相位—频率特性。 数据手册中也有这两张曲线图。 如图所示,运算放大器的电压增益和相位随频率变化。运算放大器的增益与反馈后的增益(使用电压跟随器时为0db)之差,即为反馈环路绕行一周的增益(反馈增益)。如果反馈增益不足1倍(0db),那么,即使相位变化 180o,回到正反馈状态,负增益也将在电路中逐渐衰减,理论上不会引起震荡。 反而言之,当相位变化180o后,如频率对应的环路增益为1倍,则将维持原有振幅;如频率对应的环路增益为大于1倍时,振幅将逐渐发散。在多数情况下,在振幅发散过程中,受最大输出电压等非线性要素的影响,振幅受到限制,将维持震荡状态。 为此,当环路增益为0db时的频率所对应的相位与180o之间的差是判断负反馈环路稳定性的重要因素,该参数称为相位裕度。(fig2b.) 如没有特别说明,单个放大器作为电压跟随器时,要保持足够相位裕度的。注: 数据手册注明「建议使用6db以上的增益」的放大器,不可用作电压跟随器。 2.2.运算放大器周边电路对反馈环路的影响 在实际应用中,构成电压跟随器并非象fig 1.那样简单地将输入端和输出端直接连接在一起。 至少输出端是与某个负载连接在一起的。因此,必须考虑到该负载对放大器的影响。 例如,如fig 3.所示,输出端和接地之间接电容时,这一容量与运算放大器的输出电阻构成的常数造成相位滞后。 (fig2b.所示之状态可能变化为fig2c所示之状态)这时,环路增益在输出电阻和c的作用下降低。同时,相位和增益之间不再有比例关系,相位滞后成为决定性因素,使反馈环路失去稳定,最糟糕时可能导致震荡。单纯地在输出端关于共模反馈环路稳定性的考虑 Return To Innocence
系统稳定性意义以及稳定性的几种定义.
运放稳定性分析环路稳定性基础
5.5 生态系统的稳定性
运放稳定性1-环路稳定性基础
5.5 生态系统的稳定性
多级运放稳定性分析及补偿方法
生态系统的稳定性教案.doc
典型的两级运放环路稳定性分析
讨论电容对运放稳定性的影响
关于共模反馈环路稳定性的考虑
运算放大器稳定性实验
环路相位-开关电源稳定性设计
运算放大器的稳定性4―环路稳定性主要技巧与经验
利用Pspice模型分析放大器环路的稳定性
使用运放构成电压跟随器的稳定性问题
相关主题
文本预览