
激光雷达技术及其应用综述
一、激光雷达的概念
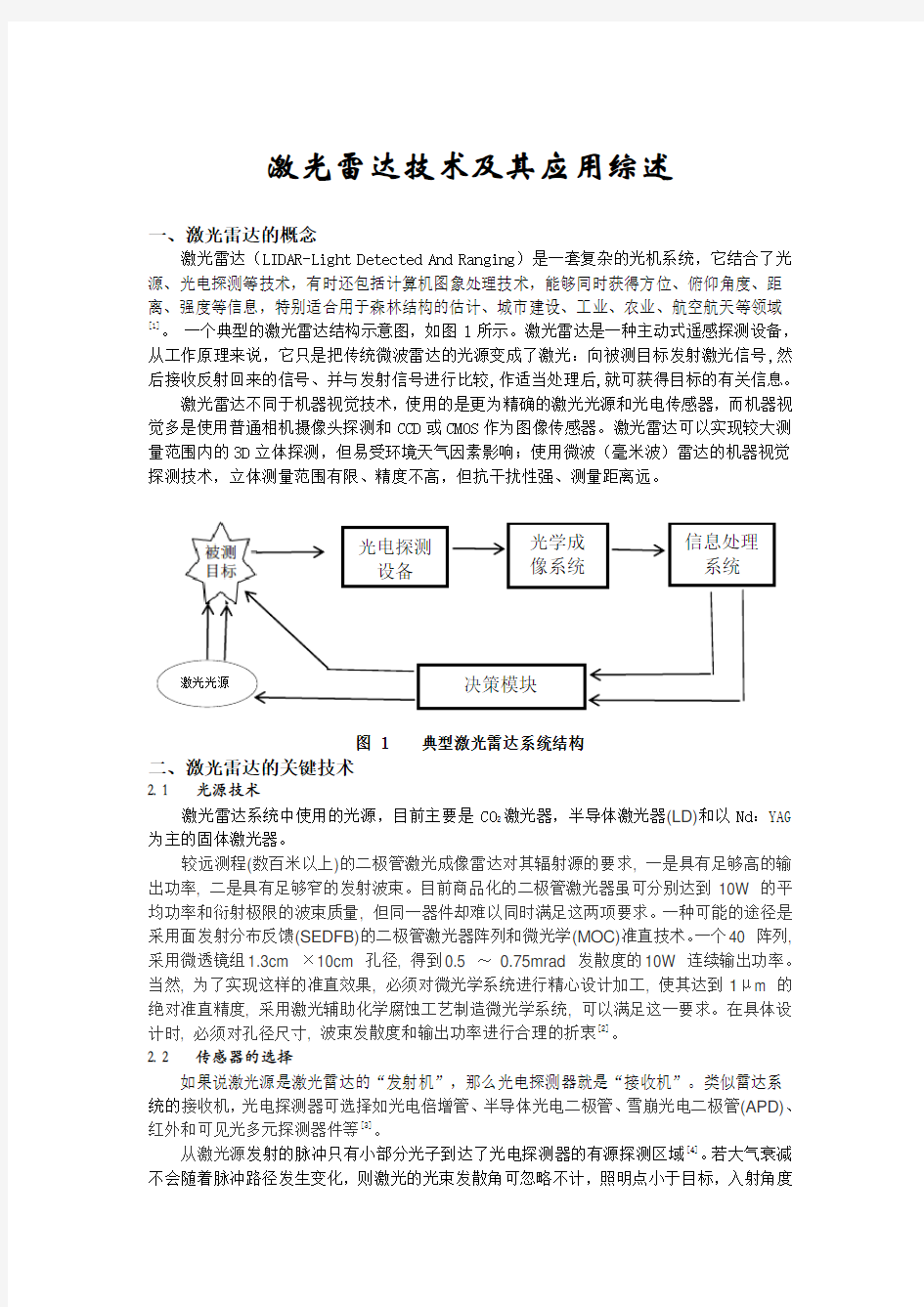
激光雷达(LIDAR-Light Detected And Ranging)是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。一个典型的激光雷达结构示意图,如图1所示。激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD或CMOS作为图像传感器。激光雷达可以实现较大测量范围内的3D立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。
图 1 典型激光雷达系统结构
二、激光雷达的关键技术
2. 1 光源技术
激光雷达系统中使用的光源,目前主要是CO2激光器,半导体激光器(LD)和以Nd:YAG 为主的固体激光器。
较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~0.75mrad 发散度的10W 连续输出功率。当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。在具体设计时, 必须对孔径尺寸, 波束发散度和输出功率进行合理的折衷[2]。
2. 2 传感器的选择
如果说激光源是激光雷达的“发射机”,那么光电探测器就是“接收机”。类似雷达系统的接收机,光电探测器可选择如光电倍增管、半导体光电二极管、雪崩光电二极管(APD)、红外和可见光多元探测器件等[3]。
从激光源发射的脉冲只有小部分光子到达了光电探测器的有源探测区域[4]。若大气衰减不会随着脉冲路径发生变化,则激光的光束发散角可忽略不计,照明点小于目标,入射角度
为零,反射为完全漫反射,那么脉冲光接收的峰值功率P(R)为:
其中,P0为发射激光脉冲的光峰值功率,ρ为目标反射率,A0为接收器的孔径面积,η0为探测光的光谱透射,γ为大气衰减系数。上述方程表明,随着距离 R的增加,接收功率迅速降低,当然这是显而易见的。而大气衰减主要是由于空气中的“瑞利散射”,由于它与波长的4次方成反比,所以大多数激光雷达传感器的接受光谱范围都处在近红外区。目前主流激光雷达供应商采用的也是1550nm波段的激光源。
三、激光雷达的主要实现方法
激光雷达目前尤以在汽车无人驾驶领域的应用最为引人关注。智能汽车的激光雷达测距壁障系统,是精确还原汽车周围的360° x 20°的3D地图,需用光栅扫描单个或多个激光光束,或对场景进行光覆盖并收集点坐标数据。前一种方法被称为扫描式LiDAR,而后者是Flash面阵式LiDAR。
3. 1 扫描式LiDAR
①以Velodyne公司为例,安装在车顶的激光雷达平台以每分钟300~900转的速度旋转,同时从64颗905 nm激光二极管发出脉冲。每个光束都有一颗专用雪崩光电二极管(APD)检测器。类似的方法是使用旋转多面镜,在不同方位和下倾角度,以略微不同的倾斜角度来控制单束脉冲。在恶劣且复杂的驾驶环境中,这两个设计中的运动部件都暗藏着失败的风险。
②基于微机电系统(MEMS),整套系统只需一个很小的反射镜就能引导固定的激光束射向不同方向。由于反射镜很小,因此其惯性力矩并不大,可以快速移动,速度快到可以在不到一秒时间里跟踪到2D扫描模式。MEMS激光雷达的一大优势是传感器可以动态调整自己的扫描模式,以此来聚焦特殊物体,采集更远更小物体的细节信息并对其进行识别,这是传统机械激光雷达无法实现的。
③激光雷达采用相控阵(OPA)设计,它搭载的一排发射器可以通过调整信号的相对相位来改变激光束的发射方向。如果发射器同步发射激光,激光则会射向同一个方向。不过,如果左侧发射器相位处在右侧之后,激光则会发射向左边,向右发射同理[5]。
相控阵LiDAR 工作原理
虽然OPA原理简单易懂,但相控阵激光雷达目前应用仍然没有机械式和MEMS激光雷达广泛,还有很大的上升和改进空间。
3. 2 面阵式LiDAR
多束密集的激光束直接向各个方向漫射,因此只要一次快闪就能照亮整个场景。它运行起来更像摄像头[6]。随后,系统会利用微型传感器阵列采集不同方向反射回来的激光束。
Flash LiDAR 的一大优势是它能快速记录整个场景,避免了扫描过程中目标或激光雷达移动带来的各种麻烦。不过,这种方式也有自己的缺陷。Flash面阵式LiDAR的主要缺点是光子预算:一旦距离超过几十米,返回光子的数量就太少,根本无法进行可靠的探测。如果不是对场景进行光覆盖,以牺牲切向分辨率为代价,用网格点状结构光来照明,这就可得到改善。垂直腔面发射激光器(VCSELs)使其可在不同方向同时发射成千上万的光束。四、激光雷达技术的实际应用
激光雷达拥有众多已知的优势特征,如极高的距离分辨率和角分辨率、速度分辨率高、测速范围广、能获得目标的多种图像、比微波雷达的体积和重量小等。这使得激光雷达能精确测量目标位置(距离和角度)、运动状态(速度、振动和姿态)和形状,探测、识别、分辨和跟踪目标。激光雷达主要的实际应用场景在于民用、军事和科研领域。
3. 1 民用领域
伴随着目前人工智能技术开发的热潮,激光雷达在无人驾驶领域的应用得到了前所未有的青睐。以谷歌为首的一批科技企业,汲取早前电动车巨擘特斯拉使用毫米波雷达和单目摄像头进行的无人驾驶实验中出现的事故经验,在识别物体时选择激光雷达(LiDAR)技术,使得这一路线得到无人驾驶业界的进一步肯定。
3. 3 科学研究领域
在科学研究领域用到激光雷达的学科也不少,尤其是在环境勘探监测领域[7]。依赖于激光束与大气物质相互作用的理论基础。不同波长的激光与大气相互作用机制对应于不同种类的大气探测激光雷达。
近来在海洋生命科学领域,激光雷达也正高效地为我国海洋事业强国梦发挥着至关重要的作用。海洋生物中的浮游植物有着特殊的存在意义,因为其它海洋生物以浮游植物作为直接或间接的食物来源。为观察海洋生物量的分布,一般会借助于测定海水中的叶绿素浓度来作为浮游植物生物量的指标。传统的仪器分析技术,如分光光度法、荧光分光光度法和色谱分析,虽然精度能满足要求,但这些方法依靠逐点采样测量的方式,分析速度很慢,故很难应用于大面积水域的现场探测。海洋激光雷达是进行叶绿素浓度测量的主动遥测设备,也是目前研究的一个热点。另外,海洋遥感卫星的发射,需要精确的地面遥测手段作为印证,激光雷达系统又可作为重要的印证设备。
3. 4 军事领域
美国、俄罗斯等国在激光武器研发领域拥有深厚经验,以他们为首的西方军事强国,将激光雷达技术应用在很多武器设备上,包括侦察用的成像激光雷达、直升机壁障激光雷达、化学试剂探测激光雷达和机载海洋激光雷达等。
五、结语
诚然,激光雷达仍有很多不足之处,其中最重要的就是鲁棒性较差。鲁棒性是我们对“抗干扰性”工业上的通俗称呼,指光源对目标的位置敏感程度。激光源由于方向性强,放置在摄像头视野的不同区域或不同角度时,对目标对高亮区域的镜面反射发生的可能性不同,图像会随之变化,不利于后续的特征提取,是为鲁棒性差。而机器视觉基本不受约束。
因此未来必然是多种类型传感器相融合的时代,机器视觉与激光雷达技术携手共存、优势互补是大势所趋[8]。
参考文献:
[1] B. Koetz, F. Morsdorf, G. Sun, K. J. Ranson, K. Itten, B. Allg?wer,“Inversion of a Lidar Waveform Model for Forest Biophysical Parameter Estimation”[J],IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, 3(1), 2006, p.49-53.
[2] 陈湘君,陈自来,戴永江,萧泉,“固体激光雷达的发展现状”[J],红外与激光工程,1998
[3] 马宗峰,欧攀,张春熹,红外探测器及其在系统中的应用学术交流会,2007
[4] 赵连城,中国功能材料科技与产业高层论坛,2009
[5] 叶征宇,赵思思,王智勇,“应用于激光雷达的光学相控阵技术”[J],光电工程, 2012(2)
[6] 方毅,张秀达,胡剑,“一种直接应用灰度叠加提高面阵激光雷达测距精度的方法”[J],中国激光,2013
[7] 尹青,何金海,张华,“激光雷达在气象和大气环境监测中的应用”[J],气象与环境学报,2009
[8] 张永泽,艾长胜,“基于激光雷达与机器视觉相结合的植保机械导航方式的研究”[J],科技尚品,2016
合成孔径雷达概述 1合成孔径雷达简介 (2) 1.1 合成孔径雷达的概念 (2) 1.2 合成孔径雷达的分类 (3) 1.3 合成孔径雷达(SAR)的特点 (4) 2合成孔径雷达的发展历史 (5) 2.1 国外合成孔径雷达的发展历程及现状 (5) 2.1.1 合成孔径雷达发展历程表 (6) 2.1.2 世界各国的SAR系统 (9) 2.2 我国的发展概况 (11) 2.2.1 我国SAR研究历程表 (11) 2.2.2 国内各单位的研究现状 (12) 2.2.2.1 电子科技大学 (12) 2.2.2.2 中科院电子所 (12) 2.2.2.3 国防科技大学 (13) 2.2.2.4 西安电子科技大学 (13) 3 合成孔径雷达的应用 (13) 4 合成孔径雷达的发展趋势 (14) 4.1 多参数SAR系统 (15) 4.2 聚束SAR (15) 4.3极化干涉SAR(POLINSAR) (16) 4.4合成孔径激光雷达(Synthetic Aperture Ladar) (16) 4.5 小型化成为星载合成孔径雷达发展的主要趋势 (17) 4.6 性能技术指标不断提高 (17) 4.7 多功能、多模式是未来星载SAR的主要特征 (18) 4.8 雷达与可见光卫星的多星组网是主要的使用模式 (18) 4.9 分布SAR成为一种很有发展潜力的星载合成孔径雷达 (18) 4.10 星载合成孔径雷达的干扰与反干扰成为电子战的重要内容 (19) 4.11 军用和民用卫星的界线越来越不明显 (19) 5 与SAR相关技术的研究动态 (20) 5.1 国内外SAR图像相干斑抑制的研究现状 (20) 5.2 合成孔径雷达干扰技术的现状和发展 (20) 5.3 SAR图像目标检测与识别 (22) 5.4 恒虚警技术的研究现状与发展动向 (25) 5.5 SAR图像变化检测方法 (27) 5.6 干涉合成孔径雷达 (31) 5.7 机载合成孔径雷达技术发展动态 (33) 5.8 SAR图像地理编码技术的发展状况 (35) 5.9 星载SAR天线方向图在轨测试的发展状况 (37) 5.10 逆合成孔径雷达的发展动态 (38) 5.11 干涉合成孔径雷达的发展简史与应用 (38)
雷达简介及分类 英文中的“radar”(雷达)一词来源于缩略语(RADAR),表示“radio detection and ranging”(无线电检测与测距)。现如今,由于它已经成为一项非常广泛实用的技术,“radar”一词也变成一个标准的英文名词。它是利用目标对电磁波的散射来发现,探测、识别各种目标,测定目标坐标和其它情报的装置。在现代军事和生产中,雷达的作用越来越显示其重要性,特别是第二次世界大战,英国空军和纳粹德国空军的“不列颠”空战,使雷达的重要性显露的非常清楚。雷达由天线系统、发射装置、接收装置、防干扰设备、显示器、信号处理器、电源等组成。其中,天线是雷达实现大空域、多功能、多目标的技术关键之一;信号处理器是雷达具有多功能能力的核心组件之一。 雷达的分类: 雷达种类很多,分类方法也很复杂,以下列举部分分类方法: (1)按定位方法可分为:有源雷达、半有源雷达和无源雷达。 (2)按装设地点可分为;地面雷达、舰载雷达、航空雷达、卫星雷达等。 (3)按辐射种类(雷达信号形式)可分为:脉冲雷达和连续波雷达、脉部压缩雷达和频率捷变雷达等。 (4)按照角跟踪方式可分为:单脉冲雷达、圆锥扫描雷达和隐蔽圆锥扫 描雷达等。 (5)按工作频段可分为:米波雷达、分米波雷达、厘米波雷达和其它波段雷达、超视距雷达、微波雷达、毫米波雷达以及激光雷达等。 (6)按照目标测量参数可分为:测高雷达、二坐标雷达、三坐标雷达和 故我识对雷达、多站雷达等。 (7)按照天线扫描方式可分为:分为机械扫描雷达、相控阵雷达等。 (8)按照雷达采用的技术和信号处理的方式可分为:相参积累和非相参 积累、动目标显示、动目标检测、脉冲多普勒雷达、合成孔径雷达、边扫描 边跟踪雷达。 (9)按用途可分为:空中监视雷达(如远程预警、地面控制的拦截等)、 空间和导航监视雷达(弹道导弹告警、卫星监视等)、表面搜索和战场监视 雷达(地面测绘、港口和航道控制)、跟踪和制导雷达(表面火控、弹道制
雷达的目标识别技术 摘要: 对雷达自动目标识别技术和雷达目标识别过程进行了简要回顾,研究了相控阵雷达系统中多目标跟踪识别的重复检测问题提出了角度相关区算法,分析了实现中的若干问题,通过在相控阵雷达地址系统中进行的地址实验和结果分析表明:采用角度相关区算法对重复检测的回波数据进行处理时将使识别的目标信息更精确从而能更早地形成稳定的航迹达到对目标的准确识别。 一.引言 随着科学技术的发展,雷达目标识别技术越来越引起人们的广泛关注,在国防及未来战争中扮演着重要角色。地面雷达目标识别技术目前主要有-Se方式,分别是一维距离成象技术、极化成象技术和目标振动声音频谱识别技术。 1.一维距离成象技术 一维距离成象技术是将合成孔径雷达中的距离成象技术应用于地面雷达。信号带宽与时间分辨率成反比。例如一尖脉冲信号经过一窄带滤波器后宽度变宽、时间模糊变大。其基本原理如图1所示。 2.极化成象技术 电磁波是由电场和磁场组成的。若电场方向是固定的,例如为水
平方向或垂直方向,则叫做线性极化电磁波。线性极化电磁波的反射与目标的形状密切相关。当目标长尺寸的方向与电场的方向一致时,反射系数增大,反之减小。根据这一特征,向目标发射不同极化方向的线性极化电磁波,分别接收它们反射(散射)的回波。通过计算目标散射矩阵便可以识别目标的形状。该方法对复杂形状的目标识别很困难。 3.目标振动声音频谱识别技术 根据多普勒原理,目标的振动、旋转翼旋转将引起发射电磁波的频率移动。通过解调反射电磁波的频率调制,复现目标振动频谱。根据目标振动频谱进行目标识别。 传统上我国地面雷达主要通过两个方面进行目标识别:回波宽度和波色图。点状目标的回波宽度等于入射波宽度。一定尺寸的目标将展宽回波宽度,其回波宽度变化量正比于目标尺寸。通过目标回波宽度的变化可估计目标的大小。目标往往有不同的强反射点,如飞机的机尾、机头、机翼以及机群内各飞机等,往往会在回波上形成不同形状的子峰,如图2所示。 这类波型图叫作波色图。根据波色图内子峰的形状,可获得一些目标信息。熟练的操作员根据回波宽度变化和波色图内子峰形状,进行目标识别。
概述 介绍 Rockwell Collions WXR-2100型多扫描气象雷达在气象信息的处理和提炼方法上有革命性的突破,多扫描气象雷达是一种全自动雷达,它可以在不需要飞行员输入扫描角度和进行增益设置的情况下,不管在什么时候,不管飞机的姿态如何,对所有范围内重要的气象信息进行无杂波的显示。当多扫描气象雷达工作在自动模式的时候,每个飞行员将会获得一般只有有经验的雷达操作员才能获得的气象信息,而飞行员只需进行简单的规范化航空公司飞行员培训。多扫描气象雷达有效的减少了飞行员的工作负担,并增强了天气的探测能力,增加了机组及旅客的安全性。 多扫描雷达工作的关键在于雷达对雷雨底部反射部分的探测,然后通过先进的数字信号处理技术对地面杂波进行抑制。为了对短、中、长距离范围内的气象进行更好的探测,多扫描气象雷达也集成了多雷达扫描功能,对扫描角度进行预设。因此,在不同的飞行阶段,不同的探测距离,它的气象探测结果都十分出色。真320海里探测和Qverflight Protection功能是多扫描气象雷达众多新特征中的两个。多扫描气象雷达因为使用先进的运算法则来消除地面杂波,这使它能够跨越雷达视野的限制,为飞行员提供真正意义上的320海里气象资料。Overflight Protection功能使机组人员能够躲开雷雨顶部渗透,这是如今导致飞机颠簸的主要原因之一。Overflight Protection功能将那些对飞机造成威胁的任何雷雨信息保持在雷达显示屏上,直到它不在对飞机造成威胁为止。 系统描述 重要的运行特点 全自动工作:多扫描气象雷达设计工作在全自动模式,飞行员只需输入探测范围,而不需要输入扫描角度和进行增益设置。 理想的无杂波显示:Rockwell Collions第三代地面杂波抑制算法能减少约98%的地面杂波,这使它能理想的无杂波显示有威胁的气象信息。 在不同探测范围和飞行高度情况下良好的气象探测能力:多扫描气象雷达将从不同扫描角度获得的气象数据储存在存储器中,当飞行员选择了所要求的显示范围,不同角度的扫描信息将会从存储器中取出并一起显示。通过多角度的扫描,可以获得近距离和远距离的气象信息,这使得不管飞机的姿态如何,不管何种探测范围,显示屏上所呈现的都是一幅最优化的气象图。 决策气象:多扫描气象雷达能够提供真正意义上的320海里决策气象信息。 Gain Plus:Gain Plus包括以下功能: 传统的加减增益控制:多扫描气象雷达允许机组人员在人工或自动工作模式的时候进行增加或减小增益。 基于温度的增益控制:在高海拔的巡航高度,由于低的雷雨雷达反射率,将会基于温度对雷雨增益进行补偿。 路径衰减补偿和警报(PAC Alert):对距飞机80海里范围内的干扰性气象造成的衰减进行补偿,当补偿超过限制,一个黄色的PAC Alert杆将显示以提醒飞行员注意雷达阴影区。Overflight Protection:Overflight Protection功能减少了在高海拔巡航高度时疏漏雷雨顶部渗漏的可能性。多扫描气象雷达向下扫描波束的信息和它的信息存储能力将发挥作用,可以防止在飞机完全穿越有威胁的雷雨区之前,雷雨区图象在显示屏上消失。 海洋气候反射率补偿:多扫描气象雷达能对海洋雷雨反射率的减小进行增益补偿,以便在
雷达技术综述 Overview of Radar Technology 摘要: 雷达被广泛用于军事预警、导弹制导、民航管制、地形测量、气象、航海等众多领域。本文首先概述了雷达发展历程并总结了雷达技术发展的成因,然后对雷达的基本工作原理和基本雷达方程作了简要的介绍。最后介绍了几种实际雷达并指出了雷达的未来发展方向。 关键词: 雷达技术;工作原理;雷达应用;发展趋势 Abstract: Radar is widely used in many fields of military early warning, missile guidance, aviation control, topographic surveying, meteorology, navigation and so on.This paper outlines the development process of radar and summarizes the causes of the development of radar technology,then briefly introduces the basic principle of radar and basic radar equation.Finally, introduces several kinds of practical radar and points out the future development direction of radar. Key words: radar technology; working principles; radar applications; trend in development 引言 雷达是英文Radar的音译,源于radio detection and ranging的缩写,原意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达最先是作为一种军事装备服务于人类,主要用来实施国土防空警戒,指挥和引导己方作战飞机以及各种地面防空武器。随着雷达技术的不断改进,如今雷达被广泛用于民航管制、地形测量、气象、航海等众多领域。随着高科技的不断发展,雷达技术将在21世纪得到更广泛的应用。 1 雷达的发展历程 雷达诞生于20世纪30年代,从美、欧等发达国家的雷达装备技术发展来看,雷达的发展历程大致经历了4个阶段:第1个阶段是从20世纪30年代到50年代,为实施国土防空警戒,指挥和引导己方作战飞机以及各种地面防空武器(高炮、高射机枪、探照灯等),西方大量研制部署米波段雷达和以磁控管为发射机的微波雷达。当时雷达探测目标的种类简单,主要是飞机,此外还有少量的飞艇和气球,雷达的典型技术特征是电子管、非相参,这种雷达被称为第1代。 第2个阶段是从20世纪50年代到80年代,防空作战对雷达提出了由粗略
机载激光雷达数据后处理软件(LiDAR_Suite)简介 LiDAR_Suite是武汉天擎空间信息技术有限公司在国家高新技术发展计划项目基础上,开发的具有完全自主知识产权的机载LiDAR 数据后处理软件(如图1)。 图1:LiDAR_Suite 系统界面 LiDAR_Suite 综合考虑了当前机载激光雷达数据处理与应用的实际,形成了一套从原始点云数据到高质量行业产品、成熟高效的机载LiDAR数据处理工艺流程。LiDAR_Suite 功能齐全,性能稳定,提供了涵盖机载激光雷达数据预处理、基础共性处理和专业应用处理等三个处理层次的丰富功能。具体包括: 1)机载LiDAR 点云数据、影像、矢量及DEM 等多源空间数据的存取与可视 化,提供了和主流LiDAR 数据处理软件、遥感影像处理软件以及GIS软件的数据接口; 2)机载LiDAR 数据质量控制;机载LiDAR 系统检校、点云数据精度评价 和点云数据的无缝航带拼接; 3)海量点云数据的工程化组织管理及其自动批处理;集群环境下的点云数据快 速处理; 4)多种点云数据的自动滤波、分类算法,基于多模式和多视图的点云编辑精细
分类,多模式和可视化的分类精度评价; 5)基于机载LiDAR 点云的高质量数字高程模型和等高线生产; 6)面向机载LiDAR 同机航空数码相机的整区域快速正射影像生产;机载 LiDAR点云与非同机遥感影像的配准; 7)电力行业应用:电力线提取与建模、电力设施周边地物要素采集、危险点间 距量测等; 8)数字城市应用:独立的子模块Building Modeler,实现城市建筑物三维模型的 自动、半自动建立。 LiDAR_Suite采用了当前机载LiDAR最新数据处理技术,采用了模块化设计思想以及插件集成技术,在可视化、人机交互、易操作性、处理精度与效率等方面与现有商业化的主流机载激光雷达数据处理软件相比均具有一定的技术优势,并提供了灵活方便的、面向行业的二次开发功能。LiDAR_Suite兼顾了先进算法自动化处理和人机交互的作用,使系统更具实用性;面向专业应用提供了测绘生产、数字城市建模、电力行业应用等功能。目前,该软件已应用于实际的高精效测绘生产中,完成从原始点云数据到基础测绘产品生产(含DEM、DOM、等高线、部分DLG)以及产品精度评价的全部流程,效果良好(图2为数据生产工程管理示意图,图3为多模式和多视图的点云精细分类编辑示意图,图4为点云自动分类结果,图5为高精度DEM渲染结果,图6为电力悬链线的提取与建模,图7为建筑物半自动建模)。目前,LiDAR_Suite的生产处理成果已应用于国土、交通、水利等领域,并可望在更多领域如资源、环境、灾害、电力、农林等得到广泛应用。
国外雷达技术新进展概述 朱峥嵘 (南京电子技术研究所,江苏省南京市210039) 摘 要:雷达技术的研发与应用重点仍然集中在有源相控阵雷达、合成孔径雷达方面。有源相控阵雷达技术在机载雷达系统、舰载雷达系统及陆基雷达系统中获得到了广泛的应用。文中指出Ga N (氮化镓)单片微波集成电路功率放大器的可靠性有所提高,有望成为有源相控阵雷达的关键部件,并使有源相控阵雷达的探测距离进一步增加。为满足在无人机上的应用要求,合成孔径雷达的小型化在2009年取得了新的进展。 关键词:有源相控阵雷达;合成孔径雷达;单片微波集成电路中图分类号:T N958 收稿日期:2010205221。 0 引 言 有源相控阵是近年来正在迅速发展的雷达新技 术,它将成为提高雷达在恶劣电磁环境下对付快速、机动及隐身目标的一项关键技术。有源相控阵雷达是集现代相控阵理论、超大规模集成电路、高速计算机、先进固态器件及光电子技术为一体的高新技术产物[122] 。合成孔径雷达是一种高分辨率的二维成像雷达,由于其具有全天候、全天时的优点,特别适于大面积的地表 成像[324] 。 2009年,国外有源相控阵雷达技术与合成孔径雷达技术取得了新进展。 1 有源相控阵雷达技术 有源相控阵雷达具有机械扫描雷达不可比拟的优越性,是雷达技术的主要发展方向。2009年,欧美各国竞相发展和装备有源相控阵雷达。陆基、舰载、机载有源相控阵雷达的研制取得了重大进展,欧洲雷达集团公司研制出可旋转的有源相控阵雷达天线,使该雷达具备了对飞机身后区域的探测能力。美国诺斯罗普?格鲁曼公司开发出敏捷波束机载有源相控阵雷达,不仅能对多个空中目标进行探测,还能进行地面动目标探测,使作战飞机能完成多种作战任务。随着技术的进步,尤其是Ga N (氮化镓)单片微波集成电路在T/R 组件中的应用,有源相控阵雷达的性能将进一步提高。1.1 GaN 单片微波集成电路可靠性提高,有望成为有源相控阵雷达的关键部件 与Ga A s (砷化镓)器件相比,Ga N 器件的功率密度更高(可达40W /mm ),并具有更高的耐高温特性 (工作温度可达600℃以上)。Ga N 高电子迁移率晶 体管可以提供较好的线性功率和效率以及较高的带宽 (高频参数达230GHz )。 美国雷声公司Ga N 芯片进行了长达1000h 的可靠性测试。在长达1000h 的Ga N 单片微波集成电路功率放大器可靠性测试中,器件性能没有降低,这表明此器件向实用化方向迈出了重要的一步。该公司称此Ga N 芯片将广泛用于防空/反导系统的雷达中,它将使有源相控阵雷达的探测距离大大增加,并将使其具有更强的电子攻击能力。1.2 有源相控阵雷达技术首次应用于防空系统的火控雷达 欧洲航空防务航天公司为美、意、德联合开发的ME ADS (中程扩展防空系统)的X 波段MFCR (多功能火控雷达)提供了第一批次5000个T/R 组件及其相关电子设备。这些组件是有源相控阵雷达的关键部件,它揭开了有源相控阵雷达技术应用于防空系统火控雷达的序幕。 X 波段多功能火控雷达是一种固态有源相控阵雷达,在它的主雷达天线上集成了一个敌我识别天线,并可选择性地集成电子支援分系统、GPS 天线和数字处理器。该雷达的天线安装在一台5t 的卡车上,用液体进行冷却,冷却剂从热交换器流向T/R 组件,然后回流至热交换器。该雷达能以“点对点模式”来监视有限方位角范围,也能以“选择模式”进行360°全向扫描。它的最远探测距离达400k m ,具有引导中远程精确制导武器拦截目标的能力,能同时捕捉多个低雷达截面积目标。该雷达的运用将为导弹防御系统提供一种功能更强的火控雷达。 ? 8?第36卷第6期2010年6月 信息化研究 I nf or matizati on Research Vol .36No .6Jun .2010
机载激光雷达选择参考 目前市场上销售的机载激光雷达来自多个厂家,有多种品牌和种类。那么,如何从中选择技术先进、性价比好、故障少又售后服务完善的设备呢? 一、机载激光雷达系统生产厂家介绍 目前提供机载激光雷达设备的厂家主要有:徕卡、Optech(加拿大)、IGI、天宝、TopEye和Riegl。 这些厂家的特点是什么呢? (a)自己生产机载激光扫描仪,然后购买其他厂家的GPS/IMU及硬件和软件,集成机载激光雷达。这类厂家有徕卡,Optech(加拿大),Topeye(瑞典)和Riegl(奥地利)。 在这些生产激光扫描仪的厂家中,生产规模最大的和研究能力最强的是Riegl公司,他向许多厂家提供了一系列产品,如: LMS-Q系列机载激光扫描仪:LMS-Q240, LMS-Q280, LMS-Q120i,LMS-Q160(超轻型,防摔型,无人机专用)等。 新型的具备数字化全波形数据获取和实时处理能力的VQ系列机载激光扫描仪:VQ180, VQ280, VQ480,LMS-Q560和VQ680i等。 目前,徕卡只生产一种激光扫描仪,而其他厂家也大多只生产两款机载激光扫描仪作为自己的系统集成使用。Optech虽然能够生产具备数字化全波形数据的激光扫描仪,但不是标准配置,用户需要另外付费。但即便如此,也已经落后Riegl公司六年。 这里还要指出的是:徕卡公司在2005年前一直使用的是加拿大Applanix POS系统,由于美国的禁运政策,向中国出口的POS系统都进行了许多修改,性能明显下降,并且伴随不稳定的情况。为了保证激光雷达性能的可靠性,徕卡在2004年后测试了许多不同公司(包括Honeywell)的POS系统。在2005年7月又从加拿大TerraMatics公司(1998年成立)购买了其POS系统的IP(知识产权),避开北美区域,由自己(在瑞士)来研发和委托生产型号为iPAS 的POS系统。目前国内所销售的徕卡的ALS50-ii和60系统基本都是配置iPAS定位系统。
雷达技术的发展历程及其在现代战争下的发展趋势研究 摘要:文章简要介绍了雷达系统和技术的发展历程,分析了雷达系统与技术发展的特点,提出了现代战争下雷达技术发展展望。 关键词:雷达技术相控阵合成孔径发展历程发展趋势 引言 自从雷达诞生至今,在70 多年的发展历程中,随着科技的不断发展、需求的不断变化,出现了多种体制的新功能雷达,雷达的技术性能、体积和重量、可靠性、维修性、抗恶劣环境的生存能力等也发生了天翻地覆的变化。特别是其在现代战争中的广泛应用,使得对雷达技术的研究具有了重要的意义。 一、雷达系统与技术的发展历程 1.20 世纪30 年代及以前 19 世纪后期,物理学家麦克斯韦、法拉第和安培等人,预言并用数学公式描述了移动电流产生的电磁波的存在情况。1935 年英国和美国科学家第一次研制出能够探测空中飞机的实用米波雷达,至此宣告了雷达的诞生。1936 年美国海军研究实验室研制了T / R (收发)开关,可使雷达系统的接收和发射分系统共用一副天线,大大简化了雷达系统结构。1939 年英国科学家发明了大功率磁控管,克服了甚高频雷达波束和频带窄的缺点,使实用雷达步入了微波频段。 2.20 世纪40 年代 20 世纪40 年代美国辐射研究室把微波新技术应用于军用机载、陆基和舰载雷达取得成功,其代表产品是SCR -270 机载雷达、SCR -584 炮瞄雷达和AN / APQ-机载轰炸瞄准相控阵雷达。20 世纪40 年代主要的雷达技术有动目标显示技术、中继技术以及单脉冲跟踪技术理论的提出。动目标显示技术应用于各型对空警戒雷达,后来应用于着陆引导、岸防等型雷达,其优势是能有效抑制地海杂波,抑制大山、建筑物、风雨雪等静止和慢动目标的干扰能将机载情报传送到地面观测站,能有效加强地空之间的信息联系。 3.20 世纪50 年代 20 世纪50 年代是雷达理论发展的鼎盛时期,雷达设计从基于工程经验阶段,进人了以理论为基础,结合实践经验的高级阶段。50 年代产生的主要理论有匹配滤波器概念、统计检测理论、模糊图理论和动目标显示理论等。各种新技术的应用,出现了诸如脉冲多普勒雷达、合成孔径雷达等新休制雷达。 4.20世纪60年代 20 世纪60 年代雷达系统发展的主要标志是数字处理技术革命和相控阵雷达的应运而生。为了探测洲际弹道导弹,为防空系统提供预测情报,产生了相控阵雷达体制。新一代雷达发展方向是全固态电扫相控阵多功能雷达。雷达信号和数据处理的数字化革命、半导体元件、大规模和超大规模集成电路的应用,使雷达技术的发展日臻完善并达到比较高的水平。
第二讲国内外地质雷达技术发展状况(历史与现状) 探地雷达的历史最早可追溯到20世纪初,1904年,德国人Hulsmeyer首次将电磁波信号应用与地下金属体的探测。1910年Leimback和Lowy以专利形式在1910年的专利,他们用埋设在一组钻孔里的偶极子天线探测地下相对高的导电性质的区域,并正式提出了探地雷达的概念。1926年Hulsenbeck第一个提出应用脉冲技术确定地下结构的思路,指出只要介电常数发生变化就会在交界面会产生电磁波反射,而且该方法易于实现,优于地震方法[1,2]。但由于地下介质具有比空气强得多的电磁衰减特性,加之地下介质情况的多样性,电磁波在地下的传播比空气中复杂的多,使得探地雷达技术和应用受到了很多的限制,初期的探测仅限于对波吸收很弱的冰层厚度(1951,B.O.Steenson,1963,S.Evans)和岩石和煤矿的调查(J.C.Cook)等。随着电子技术的发展,直到70探地雷达技术才重新得到人们的重视,同时美国阿波罗月球表面探测实验的需要,更加速了对探地雷达技术的发展,其发展过程大体可分为三个阶段: 第一阶段,称为试验阶段,从20世纪70年代初期到70年代中期,在此期间美国,日本、加拿大等国都在大力研究,英国、德国也相继发表了论文和研究报告,首家生产和销售商用GPR的公司问世,即Rex Morey和Art Drake成立的美国地球物理测量系统公司(GSSI),日本电器设备大学也研制出小功率的基带脉冲雷达系统。此期间探地雷达的进展主要表现在,人们对地表附近偶极天线的辐射场以及电磁波与各种地质材料相互作用的关系有了深刻的认识,但这些设备的探测精度、地下杂乱回波中目标体的识别、分别率等方面依然存在许多问题。 第二阶段,也称为实用化阶段,从20世纪70年代中后其到80年代,在次期间技术不段发展,美国、日本、加拿大等国相继推出定型的探地雷达系统,在国际市场,主要有美国的地球物理探测设备公司(GSSI)的SIR系统,日本应用地质株式社会(OYO)的YL-R2地质雷达,英国的煤气公司的GP管道公司雷达,在70年代末,加拿大A-Cube公司的Annan和Davis等人于1998年创建了探头及软件公司(SSI),针对SIR系统的局限性以及野外实际探测的具体要求,在系统结构和探测方式上做了重大的改进,大胆采用了微型计算机控制、数字信号处理以及光缆传输高新技术,发展成了EKKO Ground Penetrating Radar 系列产品,简称EKKO GPR系列。瑞典地质公司(SGAB)也生产出RAMAC 钻孔雷达系统,此外,英国ERA公司、SPPSCAN公司,意大利IDS公司、瑞典及丹麦也都在生产和研制各种不同型号的雷达。80年代全数字化的GPR问世,具有划时代的意义,数字化GPR不仅提供了大量数据存储的解决方案,增强了实时和现场数据处理的能力,为数据的深层次后处理带来方便,更重要的是GPR 因此显露出更大的潜力,应用领域得以向纵身拓展。 第三阶段,从上个世纪80年代至今,可称为完善和提高阶段。在此期间,GPR技术突飞猛进,更多的国家开始关注探地雷达技术,出现了很多探地雷达的研究机构,如荷兰的应用科学研究组织和代尔夫大学,法国_德国的Saint-Louis 研究所(ISL),英国的DERA,瑞典的FOA,娜威科技大学和地质研究所,比利时的RMA,南非的开普敦大学,澳大利亚昆士兰大学,美国的林肯实验室和Lawrence Livermore国家实验室以及日本的一些研究机构等等。同时,探地雷达也得到了地球物理和电子工程界的更多关注,对天线的改进、信号的处理、地下目标的成像等方面提出了许多新的见解。GSSI公司在商业上取得了极大的成功,
2006年10月第34卷 第5期 现代防御技术 MODERN DEFENCE TECHNOLOGY O ct.2006 V o.l34 N o.5雷达空间目标识别技术综述* 马君国,付 强,肖怀铁,朱 江 (国防科技大学ATR实验室,湖南 长沙 410073) 摘 要:随着人类航天活动的增加,对于卫星和碎片等空间目标进行监视变得非常重要。为了实现空间监视任务,对空间目标进行识别是非常必要的。对空间目标的轨道特性与动力学特性进行了介绍,对雷达空间目标识别技术的研究现状和发展趋势进行了详细的综述。 关键词:空间目标识别;低分辨雷达;高分辨雷达成像 中图分类号:TN957 52 文献标识码:A 文章编号:1009 086X(2006) 05 0090 05 Survey of radar space target recognition technology MA Jun guo,F U Q iang,X I AO Huai tie,Z HU Jiang (ATR L ab.,N ationa lU n i versity o f De fense T echno l ogy,Hunan Changsha410073,Ch i na) Abst ract:W ith t h e deve l o pm ent of spacefli g ht acti v ity of hum an,surveillance of space tar get such as sate llite and debris beco m es very i m portan.t In or der to i m p le m ent surveillance task,space target recogni ti o n is ver y necessary.Orb it property and dyna m ics property of space targe t are i n troduced,a deta iled sur vey is set forth about current research state and developi n g trend of radar space target recogn iti o n techno l ogy. K ey w ords:space tar get recogniti o n;lo w reso lution radar;h i g h reso lution radar i m aging 1 引 言 自从前苏联发射了第1颗人造地球卫星以来,卫星在预警、通信、侦察、导航定位、监视和气象等方面具有不可替代的优势。随着人类航天活动的增加,空间碎片日益增多,对于卫星等航天器的安全造成极大的威胁,因此对于卫星和碎片等空间目标进行监视变得非常重要。其中空间目标识别是空间监视任务中不可或缺的基本条件,空间目标识别主要是利用雷达等传感器获取空间目标的回波信号,从中提取目标的位置、速度、结构等特征信息,进而实现对空间目标的类型或属性进行识别。 2 空间目标的轨道特性与动力学特性 (1)轨道特性[1,2] 空间目标在轨道上的运动是无动力惯性飞行,本质上空间目标与自然天体的运动是一致的,故研究空间目标的运动可以用天体力学的方法。空间目标在运动时受到地球引力、月球引力、太阳及其他星体引力、大气阻力和太阳光辐射压力等的作用,轨道存在摄动。但是对轨道的实际分析表明,空间目标受到的主要力是地球引力。假设空间目标只是受到地球引力的作用,同时假设地球是一个质量均匀分布的球体,则空间目标与地球构成二体运动系统,开 *收稿日期:2005-12-15;修回日期:2006-01-23 作者简介:马君国(1970-),男,吉林长春人,博士生,主要从事目标识别与信号处理研究。 通信地址:410073 湖南长沙国防科技大学ATR实验室 电话:(0731)4576401
综合文献调研及综述 课题:基于单片机的超声波倒车雷达综述 学院 专业 年级班别 学号 学生姓名 指导教师 2015年1 月13日
一、文献调研部分 1. 中文切题期刊论文8篇 [1]刘海峰.汽车倒车雷达系统全接触[J].汽车电器,2007,12:5-8. 摘要:简要介绍倒车雷达的组成和工作原理,回顾倒车雷达的发展历程,就时下主流新车的倒车雷达安装状况以及非原车倒车雷达的性能检测结果进行报道,对倒车雷达的选购安装和使用过程中的注意事项进行总结,最后展望倒车雷达系统的未来发展。 [2]陈烁华,冯桑.倒车辅助系统的技术发展[J].城市车辆,2009,10:36-38. 摘要:倒车辅助系统,又称泊车辅助系统或可视倒车雷达,能够给驾驶员倒车、泊车操作带来极大的方便,现已越来越多配置于汽车当中。本文详细地介绍倒车辅助系统的产生背景、发展历程以及现有主流产品的种种特点;并对其缺陷做出了初步探讨,提出了新的解决思路。 [3]段现星.超声波传感器在倒车雷达上的发展[J].家电检修技术,2009,12:1. 摘要:<正>倒车雷达是汽车泊车或者倒车时的安全辅助装置,能以声音或者更为直观的视频显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。 [4]刘鑫,朱靖玉.基于单片机的倒车雷达的设计[J].电子设计工程,2012,01:94-97. 摘要:为降低汽车倒车时的碰撞事故,提出了一种基于单片机的超声波测距倒车雷达的设计方案。该设计根据超声波测距原理,采用AT89S52单片机为控制核心,设计了超声波测距倒车雷达,并对测量距离误差进行了分析。测量距离为0.1~5.0 m,其精度经过校正后可达1 cm。该设计结构简单、工作可靠,有良好的测量精度和灵敏度。 [5]吴琼,封维忠,马文杰.汽车倒车雷达系统的设计与实现[J].现代电子技术,2009,09:191-194. 摘要:为避免汽车倒车过程中发生碰撞,设计一种基于单片机AT89C51的倒车雷达系统,介绍了超声波测距的基本原理,阐述了倒车雷达系统的结构组成、硬件电路设计以及软件设计,并在数据处理部分采用温度补偿消除温度对声速的影响,提高了测距精度。倒车距离采用LCD进行实时显示,并通过语音报警电路对不同距离段做出不同的语音提示。实验表明该倒车雷达系统在30~500 cm范围内可实现准确测距,具有可靠性较高、外围电路简单、实用性强等优点。 [6]高旭,朱军.基于AT89S52单片机的超声波倒车雷达系统的设计[J].电子技术,2010,01:60-61+56. 摘要:利用超声波测距原理,出于低成本、高精度的目的,提出了一种基于AT89S52的超声波倒车雷达系统的设计方案。硬件部分采用AT89S52单片机作为控制器,主要有超声波发射电路、超声波接收电路、温度检测电路、LCD显示电路和报警电路。本文在分析超声波测距原理的基础上,给出了实现超声波倒车雷达系统的软件设计流程图和硬件设计电路图。该系统测量精度为1cm,完全能够满足汽车倒车系统的设计要求。 [7]林勇.汽车倒车防撞雷达系统原理及优化的探讨[J].电脑知识与技术,2008,33:1498-1499. 摘要:文章概述了利用单片机控制的超声波测距应用于汽车倒车防撞雷达系统的基本原理,例如当汽车倒车时,启动单片机及外部传感器实现距离测量,单片机对超声波的发射与接收通过计时进行控制,当所测得的距离小于预设的安全距离时,启动声光报警,有效避开可能对倒车造成危害的障碍物和行人。同时文章对该系统存在的弊端及其优化思路进行详细阐述。
激光雷达原理、关键技术及应用的深度解析 “雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等 特征参数。 传统的雷达是微波和毫米波波段的电磁波为载波的雷达。激光雷达以激光作为载波.可以用 振幅、频率、相位和振幅来搭载信息,作为信息载体。 激光雷达利用激光光波来完成上述任务。可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。还可以采用相干接收方式接收信号,通过后置信号处理实现探测。激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图激光雷达是工作在光频波段的雷达。与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。激光光速发散角小,能量集中,探测灵敏度和分辨率高。多普勒频移大,可以探测从低速到高速的目标。天线和系统的尺寸可以作得很小。利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。 激光雷达的种类目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种: 按激光波段分:有紫外激光雷达、可见激光雷达和红外激光雷达。 按激光介质分:有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。 按激光发射波形分:有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。按显示方式分:有模拟或数字显示激光雷达和成像激光雷达。 按运载平台分:有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、
机载激光雷达数据处理 编制:深圳飞马机器人科技有限公司版本号:V0.1 日期:2019-3-22
版权声明 本文档版权由深圳飞马机器人科技有限公司所有。任何形式的拷贝或部分拷贝都是不允许的,除非是出于有保护的评价目的。 本文档由深圳飞马机器人科技有限公司提供。此信息只用于软件业务项目管理的成员或咨询专家。特别指出的是,本文档的内容在没有得到深圳飞马机器人科技有限公书面允许的情况下不能把全部或部分泄露给任何其它单位。
目录 机载激光雷达数据处理 (1) 1.概述 (5) 2.软件准备 (5) 3.数据整理 (6) 3.1.GPS数据 (6) 3.2.LIDAR原始数据 (7) 3.3.影像数据...........................................错误!未定义书签。 3.4.数据整理与存放..............................错误!未定义书签。 4.差分解算 (7) 4.1.GPS数据格式转换 (7) 4.2.影像POS数据处理..........................错误!未定义书签。 4.3.点云轨迹解算 (10) 5.影像数据处理..............................................错误!未定义书签。 6.点云数据预处理 (26) 6.1.新建项目 (26) 6.2.点云解算 (30) 6.3.数据检核 (31) 6.4.特征提取 (33) 6.5.航带平差 (34) 6.6.点云赋色 (35)
6.7.坐标转换 (36) 6.8.点云标准格式(LAS)导出 (38) 7.点云数据后处理 (39) 7.1.数据分块 (39) 7.2.噪声点滤除 (40) 7.3.分类编辑 (41) 7.4.DEM输出 (44) 7.5.EPS采集DLG (45) 7.6.基于点云采集DLG (51) 8.成果精度检查与汇交 (57) 8.1.点云精度检查 (58) 8.2.成果提交(只列出点云成果,不含影像) (58)
目标识别技术 2009-11-27 20:56:41| 分类:我的学习笔记| 标签:|字号大中小订阅 摘要: 针对雷达自动目标识别技术进行了简要回顾。讨论了目前理论研究和应用比较成功的几类目标识别方法:基于目标运动的回波起伏和调制谱特性的目标识别方法、基于极点分布的目标识别方法、基于高分辨雷达成像的目标识别方法和基于极化特征的目标识别方法,同时讨论了应用于雷达目标识别中的几种模式识别技术:统计模式识别方法、模糊模式识别方法、基于模型和基于知识的模式识别方法以及神经网络 模式识别方法。最后分析了问题的可能解决思路。 引言: 雷达目标识别技术回顾及发展现状 雷达目标识别的研究始于"20世纪50年代,早期雷达目标特征信号的研究工作主要是研究达目标的有效散射截面积。但是,对形状不同、性质各异的各类目标,笼统用一个有效散射面积来描述,就显得过于粗糙,也难以实现有效识别。几十年来,随着电磁散射理论的不断发展以及雷达技术的不断提高,在先进的现代信号处理技术条件下,许多可资识别的雷达目标特征信号相继被发现,从而建立起了相应的目标 识别理论和技术。 随着科学技术的飞速发展,一场以信息技术为基础、以获取信息优势为核心、以高技术武器为先导的军事领域的变革正在世界范围内兴起,夺取信息优势已成为夺取战争主动权的关键。电子信息装备作为夺取信息优势的物质基础,是推进武器装备信息化进程的重要动力,其总体水平和规模将在很大程度上反 映一个国家的军事实力和作战能力。 雷达作为重要的电子信息装备,自诞生起就在战争中发挥了极其重要的作用。但随着进攻武器装备的发展,只具有探测和跟踪功能的雷达也已经不能满足信息化战争的需要,迫切要求雷达不仅要具有探测和跟踪功能,而且还要具有目标识别功能,雷达目标分类与识别已成为现代雷达的重要发展方向,也是未来雷达的基本功能之一。目标识别技术是指:利用雷达和计算机对遥远目标进行辨认的技术。目标识别的基本原理是利用雷达回波中的幅度、相位、频谱和极化等目标特征信息,通过数学上的各种多维空间变换来估算目标的大小、形状、重量和表面层的物理特性参数,最后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决。目标识别还可利用再入大气层后的大团过滤技术。当目标群进入大气层时,在大气阻力的作用下,目标群中的真假目标由于轻重和阻力的不同而分开,轻目标、外形不规则的目标开始减 速,落在真弹头的后面,从而可以区别目标。 所谓雷达目标识别,是指利用雷达获得的目标信息,通过综合处理,得到目标的详细信息(包括物理尺寸、散射特征等),最终进行分类和描述。随着科学技术的发展,武器性能的提高,对雷达目标识别 提出了越来越高的要求。 目前,目标识别作为雷达新的功能之一,已在诸如海情监控系统、弹道导弹防御系统、防空系统及地球物理、射电天文、气象预报、埋地物探测等技术领域发挥出很大威力。为了提高我国的军事实力,适应未来反导弹、反卫、空间攻防、国土防空与对海军事斗争的需要,急需加大雷达目标识别技术研究的力度雷达目标识别策略主要基于中段、再入段过程中弹道导弹目标群的不同特性。从结构特性看,飞行中段
先进雷达技术综述 李煜卉 摘要:雷达技术可分为雷达信号处理技术和雷达数据处理技术,随着雷达技术的高速发展,信号和数据处理的技术也越加成熟和先进。本文将在信号和数据处理方面对现今先进的雷达技术进行一个简单的介绍,并加以综述,还会略有涉及其在某些领域的重要应用。 关键词:相干信号的杂波抑制技术雷达抗电子干扰技术空时二维信号处理技术雷达自动检测及点迹凝聚技术相控阵雷达的跟踪技术帧间滤波技术 Advanced radar technology Y uhui li Abstract: radar technology can be divided for radar signal processing and radar data processing technology, with the development of radar technology high speed development, signal and data processing technology is more mature and advanced. This paper will be in the signal and data processing aspects of the current advanced radar technology for a simple presentation, and reviewed, but slightly related in some important field of application. Key words: coherent signal clutter suppression technology Radar anti jamming technology Radar signal processing system