车流量检测系统设计
随着我国经济的快速发展交通安全的有效保障显得尤其重要,并且对交通管理的要求越来越高。与此同时各种各样的道路监控设备也应运而生。雷达监控系统视频监控系统地表传感系统激光检测系统等相继应用。由此计算机科学与现代通信等高新技术运用于交通监控管理与车辆控制以保障交通顺畅及行车安全。而实时获取交通车流量的车辆检测技术是是进行交通管理必不可少的一个步骤。随着我国城市车辆使用的增多道路状况同时也变得复杂如何对道路车流量进行实时监控对统计、预测道路交通状况十分重要并且同时这也是对道路车辆运行情况高效调度的一项十分的重要参考依据。而且当前对道路监测多使用视频方法有事还可能采用人工计数方法此方法对每条公路在某个时间段车辆行驶情况不容易做到长时间、高效的统计。因此我们需要进行一种低成本、高准确率的智能识别装系统的设计由此促进对高速路口交通情况的检测水准。
本文设计了一种基于A T89C51单片机的车速检测系统。其主要原理是将红外传感器测得的电平信号传递到单片机中通过单片机判断处理、计数等功能实现车流量的检测。本系统传感电路采用的的是红外传感矩阵利用单片机实时对传感器的输出数据进行连续读取通过特定的算法处理数据然后送显示或者发出报警信号。本系统致力于为路口车流量的监控服务从而形成对路口行车的科学管理减少交通事故的发生。
1、工作原理及总体方案选择
1.1车流量监测系统的工作原理
红外线矩阵法是一种利用红外传感器组成的红外线矩阵检测设备检测道路上机动车流量和车速的方法。它是利用红外线发射和接收方向较强的特点在车辆经过的路面上安装密度适当的几排红外线发射接收电路由此组成红外线矩阵红外线检测矩阵由两排嵌入路面内的接收器和安装在其上方几米处的发射器组成两排接收器之间的距离为0.5到2米每排接收器由若干间隔0.2到0.9米的接收管和接收电路组成。接收管在没有遮挡的情况下可以接收发射器发出的信号接收电路中产生低电平接收管在受到遮蔽的状况下下收不到发射器发出的信号接收电路中出现高电平信号。因此根据车辆驶入、通过、驶出检测区域以及车辆行驶方向并排行驶车辆的流量等情况引起的矩阵内部各测试点高低电平信号的变化经过硬件电路设计和软件编程计算方法,最终统计计算出经过该测量区域内双向并排经过的多辆车的车流量测量。
1.1.1系统总体模块设计
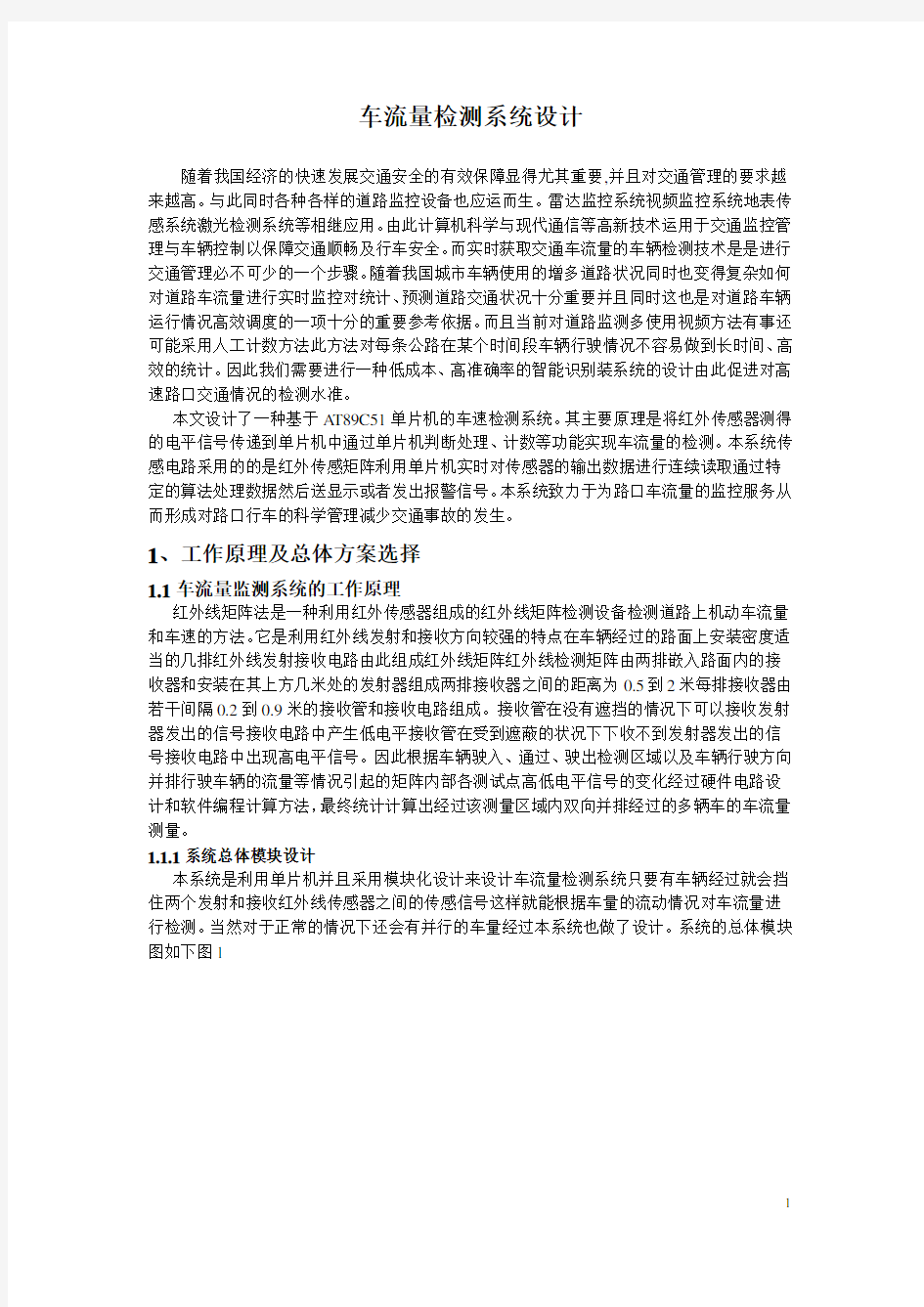
本系统是利用单片机并且采用模块化设计来设计车流量检测系统只要有车辆经过就会挡住两个发射和接收红外线传感器之间的传感信号这样就能根据车量的流动情况对车流量进行检测。当然对于正常的情况下还会有并行的车量经过本系统也做了设计。系统的总体模块图如下图1
红外线传感器 滤波放大 LCD 显示
A/D 转换 键盘 电源电路 报警器
图1 系统总体模块图
本系统采用红外线传感器组成的矩阵作为采集信号对车流量进行检测红外线传感器采集到信号之后经电源电路和以及滤波放大电路之后再传送到单片机进行处理单片机再将处理结果由LCD 显示.系统会通过出现低电平的次数来统计车流量。
1.2系统总体硬件方案选择
1.2.1核心控制器
对于该系统控制部分无疑是整个系统的最核心部分其功能可以实现与上位机通信并且接收上位机发送的数据和控制指令经处理过后控制显示屏显示内容。我们这次选取51系列单片机作为控制部分的核心器件。
单片机是内部集成了CPU 、ROM 、RAM 和I/ O 口等的微型计算机。它本身具有很强的接口性能非常适合于应用在工业控制因此又叫微控制器(MCU)。单片机品种十分齐全型号多样 CPU 从8、16、32到64位其中多采用RISC 技术片上I/O 非常丰富有的单片机内部集成有A/ D “看门狗”PWM 显示驱动、波形发生器、键盘电路等。它们具有高低不等的价格因此极大地促进了开发者的选择应用自由。除此之外单片机还具有低电压和低功耗的特点。伴随着超大规模集成电路的快速发展单片机在便携式电子产品中已被广泛使用。 1.2.2电源电路 LM7805三端稳压器稳压器件作为系统供电电源。采用一块LM7805三端集成稳压器。把市电经变压器降压输入电路而后经过整流送到LM7805三端稳压器稳压输出作为工作电压。不仅功率上可以满足系统需要不需要更换电源并且比较轻便便利使用更加安全可靠。
1.2.3 I\O 口扩展芯片
我决定选取74LS574作为列线驱动I\O 口扩展芯片。采用边沿触发 D 型触发器74LS574、74LS574是三态总线驱动输出器件可以缓冲控制输入置数并行存取并且有改善抗扰度的滞后作用。输出控制不影响触发器的内部工作既老数据可以保持甚至当输出被关闭新的数据依旧可以置入。时钟上升沿输入有效8块74LS574共用16个I/O 口数据可以并行写入芯片延迟时间较少满足设计要求。 1.2.4串口通讯芯片的选择
我决定选取MAX232作为串行通信芯片。采用单电源电平转换芯片MAX232这种器件电源与单片机供电相同外围电路简单、可靠使用十分广泛。采用RS-232接口与上位机通信方便
单片
机
控制
器
后来设计的软件调试和程序烧录。
1.2.5显示器件
基于分析流量及其它数据显示部分采用1602液晶显示。1602液晶也叫1602字符型液晶模块其是一种专门用来显示字母、数字、符号等的点阵型液晶模块。它由若干个5X7或者5X11等点阵字符位组成每个点阵字符位都可以显示一个字符每位之间有一个点距的间隔每行之间也有间隔起到了字符间距和行间距的作用正因为如此所以它不能很好地显示图形。1602LCD是指显示的内容为16X2,即可以显示两行每行16个字符液晶模块显示字符和数字。目前市面上字符液晶绝大多数是基于HD44780液晶芯片的控制原理也基本完全相同因此基于HD44780写的控制程序可以很方便地应用于市面上大部分的字符型液晶。
1.2.6硬件电路绘图软件
Proteus 是英国Labcente公司开发研制的电路分析与实物仿真软件。它运行于Windows 操作系统上可以仿真、分析各种模拟器件和集成电路该软件具有如下特点:
1、可以单片机仿真与SPICE电路设计仿真结合。可以数字电路仿真、模拟电路仿真、单片机和其外围电路组成的电路系统的仿真、I2C测试器、RS232动态仿真、SPI检测器、键盘和LCD系统仿真的功能各种各样的虚拟仪器设备如逻辑分析仪、示波器、信号产生器等。
2、可以主流单片机的仿真。目前可以使用的单片机类型有ARM7、PIC10/12/16/18系列、AVR、80C51/51系列、HC11系列和多种外围接口芯片。
3、支持软件测试功能。硬件电路仿真系统中支持单步、全速、设置断点等检测功能同时可以观察各个变量、寄存器等的当前状态因此在该软件仿真系统中也必须具有这些功能同时支持第三方的软件编译和测试环境如KeilC51 uVision2、WAVE伟福等软件。
4、具有强大的原理图绘制功能。
总之,该软件是一款集单片机和SPICE分析于一身的仿真软件功能极其强大。基于以上分析本次设计决定选取Proteus软件进行仿真。
1.3系统总体软件方案选择
软件的设计除了满足设计功能外还必须要满足易读写方便下载和编译。设计目标和硬件总体结构确定的情况下可以把软件可以分为主程序显示子程序各种延时子程序按键扫描程序四个主要部分组成。软件的编写需要借助软件编辑器和编译软件编译完成后还需要程序烧录器下载到单片机中执行。编写软件之前得首先选择一种合适的语言以及配套的编辑器和编译软件。最后还要选择一款与所选单片机的下载器或下载软件来把编写的程序下载到单片机中执行。
1.3.1单片机编程语言
现在主要运用的单片机编程语言为汇编语言和C语言。C语言是一种结构化语言可产生压缩代码。与汇编相比C语言有如下特点。(1)C语言简洁、紧凑使用方便、灵活。(2)C
语言具备高级语言和低级语言的特征。(3)C语言是结构化语言具有结构化的控制语句.(4)C 语言具有各种各样的数据类型。(5)C语言具有强大的图形功能支持多种显示器和驱动器而且计算功能、逻辑判断功能也比较强大可实现决策目的。(6)C语言适用范围大。(7)C语言
C 语言。
1.3.2系统软件编译器keil介绍
keilKeil C51是美国Keil Software公司推出的51系列兼容各种单片机C语言软件开发环境与汇编语言相比C语言在可读性、结构性、功能上、可维护性上具有很大的优势因此很容易学习。Keil中包括C语言编译器、宏汇编、库管理、连接器和一个具有强大功能的仿真调试器等在内的一体开发方案通过一个集成环境将这些部分有机的组合在一起。运行Keil软件需要WIN98、NT、WIN2000、WINXP等操作系统。如果你使用C语言编程那么Keil
几乎就是你的不二之选即使不使用C 语言而仅用汇编语言编程其方便易用的集成环境、强大的软件仿真调试工具会使我们的设计事倍功半。
2、系统硬件总体设计
2.1系统总体模块
系统的总功能模块设计如图所示整个装置可划分为三部分分别为采集部分信号调理部分和识别处理部分。在应用中由于本次设计的是没有返程的,所以在需要的路段可以将多个装置分别安装在各个路段两侧以采集到有效的数据再经过信号的调理、信号判断处理等过程最后将处理结果汇集到最近的上位机节点接着将各地方节点集总到中心工作站由此对数据进行分析、存储、统计从而达到道路车流量检测目的。为了解各路段车辆通行情况估测车流高峰以及堵车高峰制定出科学管理和措施提供重要依据。但本设计没涉及到这一点。
处理
信号 结果 信号 指令 指令 图2系统总框图设计 2.1.1信号采集部分和信号处理部分
信号采集部分主要采用矩阵理念应用红外线发射和接收管形成检测区域矩阵电路如果有车辆通过检测区就会遮挡部分发射与接收管由此引起电路中电平的相应变化。从而对通行车行驶状况的作出充分分析构建识别算法微处理器就能按照算法将车辆的行驶状况识别出来。本文将以实验模型说明设计思路。矩阵采集区由发射电路和对应在其下方的接收电路两部分组成发射部分采用两排红外线发射管每排分别8个组成。正对着每个发射管的接收管组成接收电路一样是两个测量层次和对应的每排八个单元的测量密度。在信号测量应用中为提升辨别的准确性和匹配道路状况可以灵活的增加矩阵中的测量层次和采集点密度同时还需要根据具体环境对识别算法简要改变。
信号处理部分主要作用是将采样的信号进行放大、调整使微处理器能够处理然后根据处理单元的需要选通矩阵中的测量排。
2.2系统总体电路图
信号判断处理部分也就是系统的重要部分它采用的是非曲直片AT89C51芯片作为单片机P1口来控制选通两片74HC244芯片中的一个即分别选通两个接收排中的一排将接收到的数据用的P2口接收通过仿真可检测算法在运行中的正确性。另外微处理器的P1口用于与外部进行通信如果检测到有信号的变化将识别结果发送到上位机。
2.3电源供电系统设计
电路能够正常工作电源是必不可少的。单片机属于数字电路中的器件所以这里需要选择+5V 的直流电源。所以这先将220V
式整流电路与滤波电容整流和滤波一个并不十分稳定的直流电压便会在固定式三端稳压器LM7805的输入端和地端两端形成。此直流电压在经过LM7805的稳压和电容的滤波作用便可在稳压电源的输出端产生一个稳定度好、精度高的直流输出电压。此稳压电源可作为TTL 电路或者单片机应用电路的电源。三端稳压器是一种系列化、标准化的主流线性稳压电源集
采
集
部分
信号调理部分
判断处理部分
上位机
成电路。这种稳压器以其成本低、体积小、性能高、工作可靠性好、使用十分简捷方便等特点成为当前稳压电源中应用十分广泛的一种单片式集成稳压器。在TTL器件电路广泛采用LM7805三端稳压器作为供电电源的控制器。
2.4系列单片机简介
单片机Microcontroller又称微处理器是在一块硅基片上集成了各种小器件的的微型处理器这些器件包括数据存储器RAM、中央处理器CPU、程序存储器ROM、定时器/计数器和I/O接口电路。单片机最小系统由时钟电路和复位电路组成。时钟电路用于产AT89C51单片机工作时必需的控制信号。单片机的内部电路正是在时钟信号的控制下严格地按照时序执行指令进行工作。复位电路是为单片机初始化操作准备的。只要单片机的复位引脚RST 上的复位信号要持续两个机器周期24个时钟周期以上就可以使A T89C51单片机复位。单片机最小系统电路图如图3所示。
图3单片机最小系统电路图
2.5时钟电路设计
A T89C51单片机各功能部件的运行都以时钟信号为基准有条不紊、一拍一拍地工作。因此时钟频率直接影响单片机的处理速度时钟电路的质量也是直接影响单片机系统的稳定性。常用的时钟电路有两种方式一种是内部时钟方式另一种是外部时钟方式。本次采用外部时钟方式。AT89C51XTAL1和XTAL2XTAL1和XTAL2引脚上外接定时元件内部振荡电路就会产生自激振荡。系统采用的定时元件为石英晶体和电容组成的并联谐振回路。时钟频率fosc采用12MHZC1、C2的电容值取30pF电容的大小起频率微测的作用。时钟电路如图4所示
图4时钟电路图
2.6复位电路设计
A T89C51单片机在启动运行时或者出现死机时需要复位使CPU以及其他功能部件处于一个确定的初始状态PC初始化为0000H。单片机从这个状态开始执行程序。除了进入系统的正常初始化之外当程序行出错(如程序“跑飞”)或操作错误使系统处于“死锁”状态时也需要按复位键即RST脚为高电平使A T89C51摆脱“跑飞”“死锁”状态而重新启动程序。单片机有多种复位方式常用的复位操作有上电复位和手动按键电平复位方式。本设计采用手动按键电平复位方式电路搭建。上电复位是通过外部复位电路的电容充电来实现的复位电路产生的复位信号高电平有效由RST通过一个施密特触发器与复位电路相连施密特触发器用来抑制噪声干扰在每一个机器周期的S5P2施密特触发器的输出电平由复位电路采样一次然后才能得到内部复位操作所需要的信号对A T89C51单片机进行复位。
2.7通信系统硬件设计
两个计算机或一个计算机与终端之间的数据传输可以使用并行通讯和二串行通讯种方式。由于串行通讯方式有使用成本低、线路少的特点特别是在远程通讯时避免了多条线路特征的不一致而被广泛使用。RS-232C标准是美国EIA(电子工业联合会)与BELL等公司一起开发的1969年公布的通信协议。它适合于数据传输速率在0~20000b/s范围内的通信。这个标准对串行通信接口的有关问题如信号线功能、电器特性都作了明确规定。由于通行设备厂商都生产与RS-232C制式兼容的通信设备因此它作为一种标准目前已在微机通信接口中广泛采用。AT89C51单片机具有全双工串行UART通道支持单片机进行数据的串行通信传输。除了单片机要与PC机制定通信协议确定发送速率外还需要解决的问题就是信号电平问题。RS-232C标准规定了PC机发送数据总线TXD和接收数据总线RXD采用EIA电平即传送数字“1”时传输线上的电平在3至15V之间传送数字“0”时传输线上的电平在3至15之间。但单片机串行口采用正逻辑TTL电平即数字“1”时为5V数字“0”时为-5V所以单片机与计算机不能直接相连进行通信必须将RS-232C与TTL电平进行通过芯片转换。串口通信系统电平转换电路图如图5所示。在通用的电平转换芯片中MAX232系列的芯片以集成度高单5V电源工作只需外接5个小电容即可完成RS-232C与TTL电平之间的转换而成为单片
可直接通过PC机的串行口再经过MAX232电平转换下载到单片机中从而去执行相应的功能。在该显示系统中MAX232为通信系统中最重要的硬件组成部分。
图5串口通信系统下载电路图
2.8红外线传感器
红外线传感器是使用红外线的物理特性来进行测量的传感器。红外线具有散射、吸收、反射、干涉、折射等性质。任何物体只要它本身能够产生一定的温度高于绝对零度都会辐射红外线。红外线传感器测量时可以不与被测目标直接接触因此不会产生摩擦并且有灵敏度高响应快等优点。红外线传感器有转换电路、检测元件和光学系统组成。光学系统按结构不同可划分为反射式和透射式两类。检测元件按工作原理有热敏检测元件和光电检测元件两种。热敏元件是应用最多的热敏电阻。热敏电阻受到红外线辐射时温度会升高电阻也会发生微小的变化在经过转换模块变成电信号输出。光电检测元件中最流行的是光敏器件大多数情况下是由硒化铅、砷化锑、砷化铟、硫化铅、碲镉汞三元合金、锗及硅掺杂等材料制作而成。红外线传感器主要应用于无接触式温度测量无损探伤和气体的成分分析。另外在空间技术、军事、医学和环境工程等领域也得到了大规模应用。例如使用红外线传感器从远距离测量人体表面的温度的热像图还能够发现温度异常部位及时对有疾病的患者进行诊断治疗采用人造地球卫星上的红外线传感器能够对地球云层进行实时监控能够实现大范围的天气预测正在运行的飞机上正在运行的发动机的过热情况等可以采用红外线传感器检测。红外线又被叫做红外光其实频带在700纳米以上的不可见光波长处于可见光与无线电电波之间具有折射、反射、吸收、干涉、散射等性质。复杂环境中的可见光不会影响红外线因此可在昼夜间进行检测。采用红外线原理制造的传感器又被称为红外传感器它是一种应用光电效应原理的的接近觉传感器。红外线传感器在进行测量时不与被测目标直接接触因此不会产生摩擦同时有灵敏度好响应较快等特点。常用基于红外光电式的传感器选择靠近红外区即760至2500nm频率段常用的发光器件由880nm和930nm两个系列组成。红外线传感器由检测元件、光学元件和转换模块组成。光学元件按硬件构成不同可分为透射式和反射式两类。检测元件按工作方式可分为热敏检测元件和光电检测元件。光敏元件是光电检测常用的元件其元件构成一般为
砷化钾(GaAS等半导体材料具有吸收光并能将之转换成电能当在不同距离测量时变化的光的强度将会导致电流的缓慢变化再把电流信号通过放大和相关处理就能够达到检测距离的目的。红外线通讯时将发射红外线的发光二极管和接受红外线二极管组合在一起实现。本次设计所用红外传感器的工作原理图如图所示。如果有车量经过时单片机输出的电平信号为“1”如图3.9(a)所示没有车量经过装置时红外传感器的发射端发射出的信号到达了接收端单片机检测到的电平信号就为“1”单片机通过计数功能计算出现“1”的次数来统计车流量。反之如图6所示装置分别装有发射的接收两个红外传感器。当有车量经过时车量挡住了发射端发出的信号到接收端这样检测到的电平信号就是低电平单片机会根据检测到的“0”的次数通过单片机计数功能统计车流量。
接收端
发射端
a
接收端
发射端
b
图6红外线传感器工作示意图
接地线、控制线。其内部集成了高频的滤波器件主要用来滤除红外线合成信号中的载波信号(38KH)并且同时将接收到的信号送出。在红外线合成信号被红外接收模块接受在其输出信号端就可得到前发射器发出的数字代码再由中央控制器做出对应的处理。红外是经过发射端产生红外信号接收端主要接收障碍物反射回来的反映环境的信号来判断是否有障碍物。
3、系统软件方案设计
3.1识别算法的设计过程
识别的效果直接由算法的设计决定甚至还能决定系统的成本。算法中最主要的问题是怎样判断有车辆驶入检测区间、推断车辆行驶方向、并行驶多辆车的判别、车的型号和及车流量的检测。采用单片机语言对本系统进行编程软件调试主要采用硬件检测、单排车辆判别测试、稳定双排车辆判别测试和用外部通信技术的测试四个阶段分层设计、修改、优化算法和程序最后达到一个比较好的识别效果。
(1)在硬件检测中接收电路中所使用的电阻和三极管的型号主要采用程序检测是否科学这将对采集灵敏性和采集效果产生直接影响。
(2)完成硬件检测后经过单排车辆检测测试第一需要解决判断是否有车驶入检测区的标准此步骤最重要一点是检测两个接收点的距离w首先要确保最小的车型宽度能够挡住n个检测
辆车通过还是多辆车在设计算法中提供了很大的可行性。能根据测试环境中接收点密度确定n n为3。所以在判断一排的接收信号中挡住了连续3个以上的
接收点,即表明有车辆通过。编号一排接收点从r[0]至r[7]如果首次检测到r[i]到r[j]接连被挡将j和i的差值送存变量i,如果i的值大于3即确定有车辆并且l*w即可以判断车辆宽度比对车宽标准可以确定车型。此外取出第j位以后的每一位如果7-j大于3则有可能有并行过车依照第一次的判断标准计算出是否有车辆并行通过以及车型号。
(3) 并排识别的作用是稳定的确定出车辆驶入的方向同时读取经过检测区车流量信息。这就要依据车辆顺序经过并排检测并排时产生的信号的依次变化和对车经过检测区域的分解时序建立模型设计判断车流量的方法。在这个过程新的干扰问题又会出现就是车辆依次经过两个测试点的过程中刚要通过每个测试排时就会产生提取信息的变化造成最后判别的严重错误所以在这一环节中要加入防抖和抗干扰措施在一定时段内对每一排信号进行多次信息采取设置信息采取变量将多次采取的标准变量进行综合分配分配后结果在置信区域内则判断采样信息属实。然而太多采样就会影响系统的运行速度通过实验采用两次采样间隔时间1ms就可达到满意的效果。比如第一排假如第一次采取信息中识别的车辆标志变量为a1(是0表明无车是1表明有车)并行行车标志变量b1(为0表明无车为1表明有并行车)同样道理设第二次采取到的对应变量为a2和b2则第一排真实行车情况标志变量a和b。使用相似方式获取第二排的置信信息分析两排车辆行驶情况采用设计的判断车辆通过、驶入、驶出和驶离状态模型使用算法就可以完成这一套动作以此判定车行驶方向以及车辆真正经过检测区完成一次计数的标准。综上各步骤程序和采取到的数据信息完成双向并排车流量的判别。3.2系统设计流程图
在实现车流量检测中最核心的部分主要采用单片机语言设计实现采取车流量信息的算法。怎样判断通车状态判定有无并行车辆通过怎样确定车辆已经驶入、经过、驶离和离开测试区的状态信息由此达到计数这些问题要有算法解决。软件设计最重要的部分要可划分为以下三个过称如图所示。依次对第一排车辆行驶状态进行有效采取、第二排通车情况有效采取、记过检测区域车流量采取对每一个过程全设计了一些对应的功能模块。拿第一步举例子有采取提取模块与防抖抗干扰两个模块组成。此部分的工作流程如下第一进行首次采集由此判断是否有车辆经过检测区第二判断是否通过并排的车辆。因为在实验室的实验中使用的是每排8个感应传感器但所假设的车的宽度都在3个感应传感器的距离之上并且在这个模型中检测的两排驶过的车辆最多只有2辆所以只要在算法中进行一排接收点的最多两次信息采样。并且在现实使用中只要采用合适的修改算法结构并且增加对应的感应传感器的数量来实现多辆车的多排检测。因为当车辆驶入检测装置排的一刹那该排信息提取部分的引脚电位将发生剧烈变化可能得到不正确结果所以要在采取中加入防抖措施即在首次提取信息后等待一定的时间然后开始第二次信息采取由此重复下去将多次采集的数据比对分析。假如在置信区间
样可能会降低装置处理数据的速度。通过数据的分析通过两次信息等待1毫秒已经可以达到实际应用要求准确度同时也有相当快的处理速度。软件流程图如图7
开始
第一排车辆状态提取第二排车辆状态提取通过测试区车流量提取
单片机计数
输出
图7系统软件流程图
初始化
判断状态标志 否 a1和a2是否同时非0
是
判断状态标志 否 b1和b2是否同时非0 是
图8 系统设计软件流程图
第一排第一次采集 延时1ms 第一排第二次采集
状态变量a 置1 状态变量b 置1 计数 状态变量b 置0 状态变量a 置0
上位机
以系统信息采取模块为例如果首次信息提取模块部分为第1模块流程图如上图8。其中将信息提取到的数据依次用状态变量a1首排首次采样到的车辆状态为0排车辆通过为0表明无并行车为1表明监测到有并行车表明。由此能够得到首排第二次采样到的结果。将结果赋予状态变量a2首排第二次信息采样到的车辆情况为0表明无车为1表明检测到车和b2首排第
0表明无并行车为1
次采样后用第一排防抖采集模块处理判断出第一排准确的行车结果分别用状态标志变量a
第一排测试到的车辆状态和b第一排测试到的并排过车状态表示。当a1和a2同时不为零时a=1否则a=0为0表示无车为1表明监测到有车在b1 和b2同时不为零时b=1否则b=0为0 表明没有并行车通过为1表明监测到并行车。使用同样方法对第二排信息接收点进行监测。综合第二排首次检测的结果即2a1、2b1的状态与第二排第二次监测的结果即2a2、2b2的状态使用第二排采样的抗干扰防抖部分推算出出第二排信号采样的准确结果依次使用状态标志变量2a第二排监测到的车辆状态和2b第二排监测到的并排通车状态表示。通过以上两排监测中所得到的中间环节的信息数据经过设计合适的算法同时可以及时判断车辆的宽度并且当考虑到车辆经过前后两排监测排时一定偏差可能随之产生所以还加入了中点校准模糊的算法基本消除车辆偏差的影响。其中最主要的部分是使用车辆在驶入、经过、驶出和离开监测区时可能会引发两个测量排所获得数据信息的不同变化使用第一步、第二步对各排状态位的结果分析经过算法的设计可以将车辆的行驶情况逐步提取出来,而且可以完成这一套四个动作由此确定车真正驶过监测区的标准由此作为计数依据同时还能实现对车驶进方向的判断。所以综合分析以上采样到的的各种数据信息最后可以实现双向的并排经过的多辆车的车流量监测。系统检测结果输到上位机之后又会再返回第一次采集时接着开始下一次的计数。
4.3系统相关程序
4.3.1主程序设计
系统软件采用C语言编写按照模块化的设计思路设计程序。首先分析程序所要实现的功能程序要实现液晶显示、蜂鸣器报警显示、车速计算车流量计算超标报警LED闪烁。通过按键控对部分数值标准进行设定与模式切换。主程序的工作流程如图4.2所示。程序开始时首先必须对单片机进行初始化设置其中初始化设置的内容包括中断优先级的设定中断初始化定时器初始化串行通信时通信方式的选择和波特率的设定各IO口功能的设定等。把各子程序写为一个可单独执行的完整子程序段。各子程序编译没有错误后再下载到单片机进行仿真验证这两项都通过后再将所有的程序整合到一起形成一个完整的程序再进行编译和仿真验证。
4.3.2 1602显示程序的设计
显示采用1602液晶显示显示内容包括通道1车速、通道1车流量、通道1计时时间、通道1车速标准,、通道2车速、通道2车流量、通道2计时时间、通道2车速标准。显示子程序有写数据、写命令、测忙、延时、初始化等组成。显示程序流程如图所示。
4.3.3软件中防止程序出错ERR处理
CPU受到干扰后,则CPU就不能按正常状态执行程序往往将一些操作数当作指令码来执行造成程序执行混乱。这就是经常所说的程序“跑飞”现象。“跑飞”程序后使其回到正常的一个最普遍的方法是使CPU复位使程序从头开始重新运行。大多数单片机控制设备中都有设置的人工复位电路。人工复位大多数是在整个装置都已经完全瘫痪没有办法的情况下才不得已而为之的。所以在进行软件设计时就要考虑到万一程序“跑飞”怎么应让它能够自动恢复到正常状态下运行。使用“指令冗余”是使“跑飞”的程序回到正常的一种方法。所说的“指令冗余”是指在一些比较重要的地方人为地插入几个单字节的空操作指令NOP。使程序“跑飞”到某一条单字节指令上时就不会出现将操作数当成指令来执行的错误。应该
注意的是在一个程序中“指令冗余”不能使用过多否则会降低程序的执行效率。这时可以采用另一种软件抗干扰措施即设置“软件陷阱”。“软件陷阱”是一条引导指令将采样到的程序强行的引导到一个特定的地址有一段特定的处理错误的程序。如果这段处理错误的程序入口地址为ERR所以下面三条指令便可以组成一个“软件陷阱”NOP NOP LJMP ERR
开始
程序初始化
显示数据送P0
选通列,送锁存器输出
送下一列数据,选通信号左移
左移次数>8
显示完成后
子程序返回
图9显示程序流程图
“软件陷阱”一般安排在下列四种地方。L、未使用的中断向量区。51 单片机的中断向量区为0003H至002FH在剩余的中断向量区安排“软件陷阱”以便能捕捉到错误的中断。2、未使用的大片EPROM 空间。对于剩余未编程的EPROM 空间一般都维持其原状即其内容为OFFH。3、表格区。表格一般有两种即数据表格和散转表格。由于表格的内容与检索值有一一对应的关系因此只能在表格的最后安排陷阱设置指令。4、子程序区。子程序区是
4.3.4 ISP 软件程序下载
ISP (In-System Programming )是当今流行的单片机编程模式。可在线系统编程的意思是指电路板上的可编程下载的空白元器件可以直接编程写入最终用户代码而不需要从电路板上取下可重复编程逻辑器件。已经编程的器件也可以用ISP 方式擦除或再编程。在完成编写程序的编译通过之后把可以烧写AT89C51的
ISP
相应下载软件按步骤即可对A T89C51芯片进行程序烧录下载。烧录完成成功后会有提示。重新通电即可测试和运行电路。
5、软件仿真
5.1 Proteus 仿真
5.1.1 Proteus 简介
Proteus 是目前最好的模拟单片机外围器件的环境其实proteus 与multisim 比较类似但它同时还可以仿真MCU 。如果你在学51单片机如果你想自己动手做做LCD 、LED 、AD/DA 、直流马达SPI 、IIC 、键盘等小实验Proteus 是一个不错的选择。Proteus 与其它单片机仿真软件不同的是它不仅能仿真单片机CPU 的工作情况还能仿真单片机外围电路或没有单片机参与的其它电路的工作情况。因此在仿真和程序调试时关心的不再是某些语句执行时单片机
对于这样的仿真实验从某种意义上讲弥补了实验和工程应用间脱节的矛盾和现象。 5.1.2 总体电路图
C B1
D5
XTAL3R x 1M
R 11K
S1
C 1100p F
123456789
10
JTAG
HEADER 5X2
GND
R J110K R J210K R J310K R J410K
JC K TD0TMS VIC TD1
VIC R ES ET
GND
VCC
R ES ET
1
2
C x220
C x1
20
AVR 1
AVR 2
AVR 3
PB0(XCK/T0)PB1(T1)
PB2(AIN1/INT2)PB3(AIN1/OC 0)PB4(SS )PB5(M OS I)PB6(M IS O)PB7(SC K)
PD0(R XD)PD1(TXD)PD2(INT0)PD3(INT1)PD4(OC1B)PD5(OC1A)PD6(IC P)PD7(OC2)
PA2(ADC 2)PA3(ADC 3)PA4(ADC 4)PA5(ADC 5)PA6(ADC 6)PA7(ADC 7)
PC0(SC L)
PC1PC2(TCK)PC3(TMS )PC4(TD0)PC5(TD1)PC6(TOS C1)PC7(TOS C2)
VCC AVC C AREF GND GND R SET
XTAL2X2XTAL1
X1
PA1(ADC 1)PA0(ADC 0)ATM EGA16
VIC
VCC
D1D2D3D4D5D6D7D8
V1-OE V2-OE
IS ET 18DIN 1LOAD 12C LK
13
SEGA 14SEGB 16SEGC 20SEGD 23SEGE 21SEGF 15SEGF 17SEGDP 22DIG02DIG111DIG2
6
V C C
19
G N D
4
G N D
9
U3M AX7219
R 9
15k ΩVCC
GND A D E F G B C D0D1D2
AVR 4a b f c g d
e
D PY 1234567a b c d e f g 8
dp
dp
U5
DPY_7-S EG_DP A B C D E F G
C O M
D1VIC
1A121A241A361A482A1112A2132A3152A4171Y1181Y2161Y3141Y4122Y192Y272Y352Y4
3
1G 12G
19
U2
74HC244V2--OE
V2--OE c9c10c11c12c13c14c15c16D1D2D3D4D5D6D7D8
1A121A241A361A482A1112A2132A3152A4171Y1181Y2161Y3141Y4122Y192Y272Y352Y4
3
1G 12G
19
U1
74HC244
c2c3c4c1c5c6c7c8D1D2D3D4D5D6D7D8
V1--OE V1--OE
Q4Q5Q3Q1Q2Q9Q10Q16
Q6Q15Q7Q14Q11Q12Q13Q8
D16D15D12D8D3D10D13D9D11D7D1D14D4D5D6D2R 2R 5R 1R 15R 6R 3R 9R 11R 10R 8
R 7R 4R 13R 12R 16
R 14c1c2c3c4c5c6c7c8
c9
c10
c11
c12
c13
c14
c15
c16
VCC
GND
图10系统总体电路图
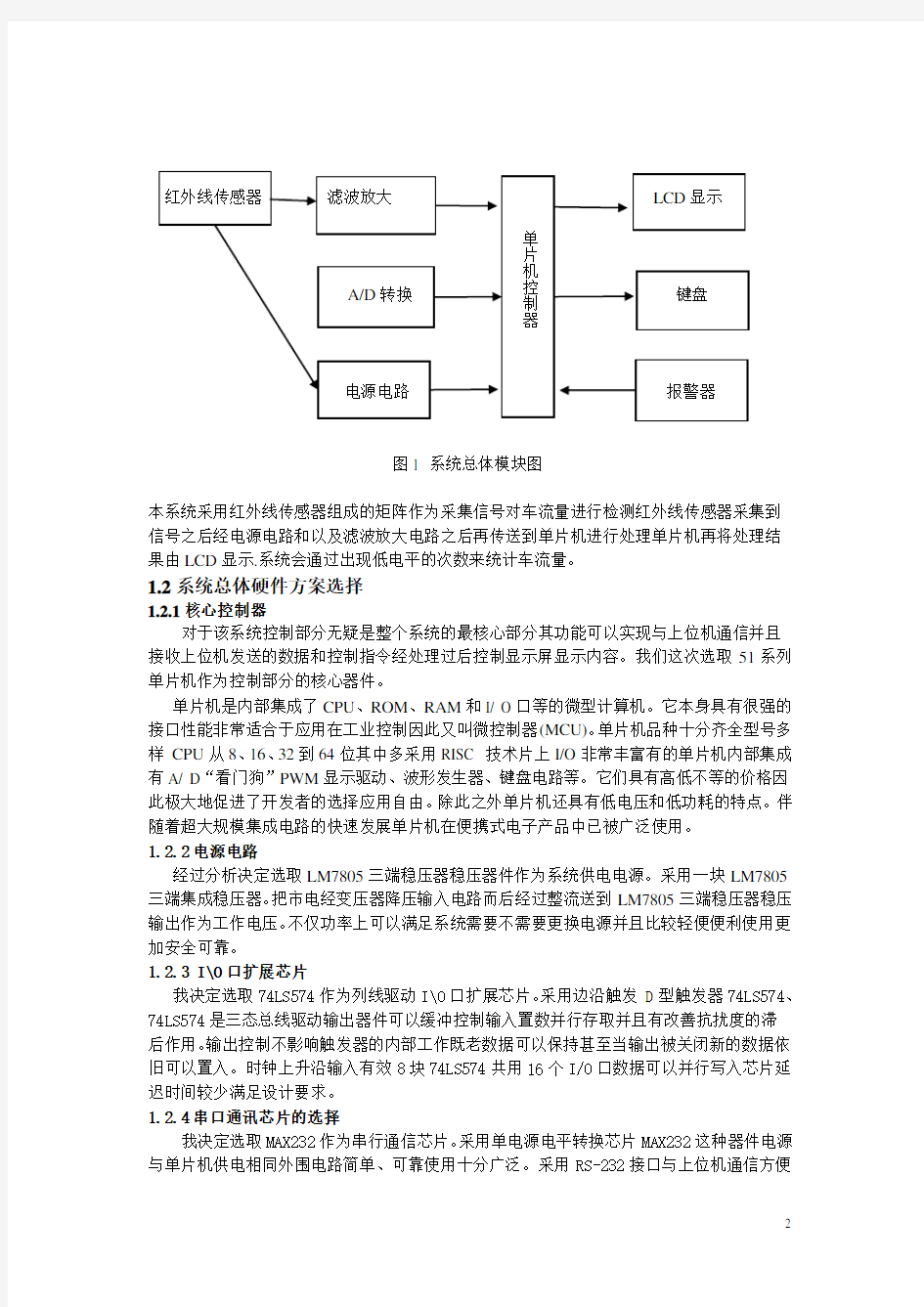
5.1.3仿真电路调试
在PROTEUS绘制好原理图后调入已编译好的目标代码文件*.HEX可以在PROTEUS的原理图中看到模拟的实物运行状态和过程。PROTEUS不仅可将许多单片机实例功能形象化也可将许多单片机实例运行过程形象化。前者可在相当程度上得到实物演示实验的效果后者则是实物演示实验难以达到的效果。并且proteus的元器件、连接线路等却和传统的单片机实验硬件高度对应。这在相当程度上替代了传统的单片机实验教学的功能例元器件选择、电路连接、电路检测、电路修改、软件调试、运行结果等。PROTEUS可以提供实验室无法相比的大量的元器件库提供了修改电路设计的灵活性、提供实验室在数量、质量上难以相比的虚拟仪器、仪表。应用PROTEUS最重要的目的是仿真从而实现我们的电路或系统实际在软件平台的的调试从而更快的完成我们的系统开发。仿真中我们用开关代替红外线矩阵一共用了9个第一个开关代替第一组的一个开关传感器形成触发信号第二组的五个开关代表接下来的5个红外传感器形成车辆驶入第一次判断信号第三组的3个开关代表最后的3个红外传感器输出车辆离开的信号。单片机通过对这几个开关状态的查询即可实现路口的监控然后把数据进行处理然后送液晶显示蜂鸣器报警即可实现系统的仿真。
道路车辆检测技术概述 近年来,随着我国交通运输事业的蓬勃发展,智能交通系统(ITS)的研究和应用越来越得到重视,交通运输部于2011年4月颁布了《公路水路交通运输信息化“十二五”发展规划》,提出“必须把推进交通运输信息化建设摆在‘十二五’规划中的突出位置”。准确、实时、完整的交通信息采集是ITS的基础,而车辆检测器则是对动态交通信息进行实时采集的基础设施。 随着电子技术、通信技术和计算机技术的不断发展,车辆检测器也由过去比较单一的种类发展为采用不同技术手段,具有多类型、多品种、多系列的交通车辆参数检测器家族。按信息采集方式的不同,可分为固定型检测技术和移动型检测技术。固定型检测技术可分为磁频采集、波频采集和视频采集3类,主要有感应线圈检测器、磁力检测器、微波检测器、超声波检测器、红外线检测器和视频检测器等,目前我国道路监控系统中,使用最多的是感应线圈车辆检测器、视频车辆检测器和微波车辆检测器3种。移动型检测技术目前主要有浮动车法、车辆识别法和探测车法等,运用的技术主要有基于GPS的定位采集技术、基于汽车牌照自动判别的采集技术、基于电子标签(Beacon)的定位采集技术和基于手机探测车的采集技术。 1磁频类车辆检测器 磁频类车辆检测器是基于电磁感应原理的车辆检测器,主要有感应线圈检测器、磁性检测器和地磁检测器等,其中感应线圈检测器是目前使用最广泛的交通流量检测装置。 1.1感应线圈检测器 感应线圈检测器是地埋型检测器,其传感器为一组通有一定工作电流的环形感应线圈。当车辆进入环形感应线圈所形成的磁场时,引起电路中调谐电流的频率或相位变化,检测处理单元通过对频率或相位变化的响应,得出一个检测到车辆的输出信号。感应线圈检测器可直接提供车辆出现、车辆通过、车辆计数及车道占有率等交通流信息。调查表明,用2m×2m的标准感应线圈对交通流量进行检测,其精度可达到98%~99%。通常在同一车道内埋设2个感应线圈,根据测定车辆
目次 前言............................................................................. II 1 范围 (1) 2 规范性引用文件 (1) 3 术语与定义 (1) 4 基本规定 (2) 5 基础设施系统 (2) 6 电力牵引供电系统 (5) 7 通信与信号系统 (8) 8 空气动力学响应、噪声和电磁环境 (10) 参考文献 (12)
前言 本标准按照GB/T1.1—2009给出的规则起草。 本标准由北京市交通委员会提出并归口。 本标准由北京市交通委员会组织实施。 本标准起草单位:北京市轨道交通建设管理有限公司、中国铁道科学研究院集团有限公司、北京市轨道交通运营管理有限公司、北京市城市轨道交通咨询有限公司、中国中铁设计咨询集团有限公司、北京市轨道交通设计研究院有限公司、中国中铁电气化局集团有限公司、中国中车长春轨道客车股份有限公司、中国中车四方机车车辆股份有限公司。 本标准主要起草人:韩志伟、于鑫、张艳兵、王道敏、田桂艳、王文斌、戴源廷、黑勇进、虞蕹、王进、王颖、李晓刚、赵静、饶东、赵立峰、李克飞、石熠、朱胜利、杜智恒、张传祺、侯庆华、赵鑫、程永谊、王冰、魏志恒、李洋、李玉路、戴华明、吴宗臻、赵俣钧、周安国、刘力、李照星、张凌云、李晔、凌晨、李媛芳、杨斯泐、徐倩、张冰、姚京川、赵欣欣、刘鹏辉、李天石、马九洋、张弘毅、范季陶、苏立轩、荣峤、张超、王朝阳、刘敏、杨峰、徐栋、孙静、张东风、刘玮、张继菁、杨珂、田琪、周启斌、兴佰祥、李雪昆、李雪飞、翟国锐、姜朝勇、程斌、梁君海、王学亮、刘江涛、李春峰、侯小强。
制动系统匹配设计计算 根据AA车型整车开发计划,AA车型制动系统在参考BB轿车底盘制造平台的基础上进行逆向开发设计,管路重新设计。本计算是以选配C发动机为基础。 AA车型的行车制动系统采用液压制动系统。前、后制动器分别为前通风盘式制动器和实心盘式制动器,制动踏板为吊挂式踏板,带真空助力器,制动管路为双回路对角线(X型)布置,采用ABS。驻车制动系统为机械式手动后盘式制动,采用远距离棘轮拉索操纵机构。因AA车型与参考样车BB的整车参数接近,制动系统采用了BB样车制动系统,因此,计算的目的在于校核前/后制动力、最大制动距离、制动踏板力、驻车制动手柄力及驻坡极限倾角。 设计要符合GB 12676-1999《汽车制动系统结构、性能和试验方法》;GB 13594-2003《机动车和挂车防抱制动性能和试验方法》和GB 7258-2004《机动车运行安全技术条件》的要求,其中的踏板力要求≤500N,驻车制动停驻角度为20%(12),驻车制动操纵手柄力≤400N。 制动系统设计的输入条件 整车基本参数见表1,零部件主要参数见表2。 表1 整车基本参数
表2 零部件主要参数制动系统设计计算 1.地面对前、后车轮的法向反作用力 地面对前、后车轮的法向反作用力如图1所示。 图1 制动工况受力简图由图1,对后轮接地点取力矩得:
式中:FZ1(N):地面对前轮的法向反作用力;G(N):汽车重力;b(m):汽车质心至后轴中心线的水平距离;m(kg):汽车质量;hg(m):汽车质心高度;L(m):轴距;(m/s2):汽车减速度。 对前轮接地点取力矩,得: 式中:FZ2(N):地面对后轮的法向反作用力;a(m):汽车质心至前轴中心线的距离。 2.理想前后制动力分配 在附着系数为ψ的路面上,前、后车轮同步抱死的条件是:前、后轮制动器制动力之和等于汽车的地面附着力;并且前、后轮制动器制动力Fm1、Fm2分别等于各自的附着力,即:
智能交通管理网络系统中城市道路监控设计 随着机动车数量的逐年增长,城市交通问题也日益突现出来。交通拥挤,车流不畅,大大影响了人们的出行速度,进而降低了生产和工作效率。因此,城市交通拥挤问题成为当今我国城市发展的重要问题。实践证明,解决城市交通问题的有效方法是在现有交通基础设施的基础上,提高交通管理水平,达到从根本上解决问题的目的。先进的交通管理系统可以有效提高城市现代化交通的有效利用率和交通流量,减少道路的交通拥挤程度,交通事故的发生率以及由于交通拥挤交通事故等造成的出行延误。城市智能交通管理系统正是通过对高科技、高水平的技术的应用,来提高交通管理系统的工作效率,达到改变城市交通混乱的局面。 智能交通系统是将先进的信息技术、数据通讯传输技术、电子传感技术、电子控制技术及计算机处理技术等有效的集成运用于整个地面交通管理系统而建立的一种在大范围内、全方位发挥作用的,实时、准确、高效的综合交通运输管理系统。城市智能交通系统是由交通信息采集和信息处理、决策、发布两部分组成。交通信息实时采集系统是交通路面的高清数字化视频系统采集。通过实时交通视频实时检测,记录来往车辆类型、车速等数据,将各监测点的各时段车辆行驶状态、车型种类、违法类型、平均车速、车流量、堵塞路口及路段的交通情况准确、快速、实时地发往交通指挥中心。道路交通信息接收、处理和发布系统是通过设置的交通信息采集网络,获取各种实时道路交通情报,经过综合处理和分析等,及时发布路面交通状况信息,向交通参与者提供有关信息,方便其选择出行路径。对采集来的信息通过计算机程序筛选处理,配合综合交通信息平台、GIS电子地图、交通疏导的决策支持 等综合信息处理,分析得出整个交通的动态交通流分布状况和交通管理的预警信息,最后形成一目了然的诱导信息。 智能交通把交通信息统计系统和电子警察执法处罚系统引入到城市道路监控中,实现了城市道路的点面结合式监控,提高了城市整体安全防范水平,缓解了日益严重的交通压力,加强了驾驶员遵守交通法规的意识,降低了恶性事件发生率。下面主要介绍交通监控的几个系统及应用:
车流量检测技术综述 胡明亮1,李飞飞 2 ,钟德浩3 (1、江西方兴科技有限公司,江西南昌330003) (2、江西省高等级公路管理局泰井管理处,江西南昌330003) (3、江西省高等级公路管理局瑞赣养护中心,江西南昌330003) 摘要:车流量检测是交通管理与控制的基础。在综述了车流量检测的传统方法、技术特点和 存在的问题后,重点分析了基于视频图像的车流量检测技术,并对其发展趋势进行了展望。 关键词:信息工程;视频图像;车流量检测;数字图像处理 0 前言 城市智能交通已逐步得到社会各界的广泛关注,如何通过智能交通系统建设来缓解日益严重的交通问题已成为交通领域的研究热点。车流量检测系统是智能交通(ITS)的基础部分,在城市道路建设、国道高速公路建设、隧道桥梁建设以及交通流的基础理论研究中占有很重要的地位。近年来,逐渐发展起来了以空气管道检测技术、磁感应检测技术、波频检测技术和视频检测技术等[1~2]为代表的多种交通检测技术[3]。车流量检测主要是通过各种传感设备对路面行驶车辆进行探测,获取相关交通参数,以达到对公路各路段交通状况及异常事件的自动检测、监控、报警等目的。 较其它方法而言,基于视频图像的检测技术涉及到视频采集、通信传输、图像处理、人工智能以及计算机视觉等多个学科,具有安装维修灵活、成本低、应用范围广、可拓展性强和交通管理信息全面等优点,并已经在国内外高速公路和公路的交通监控系统中得到应用。常用的基于视频图像的车辆检测算法有:灰度法、背景差法、相邻帧差法、边缘检测法[4]等。随着图像处理技术、计算机视觉、人工智能的发展和硬件处理速度的提高,基于视频图像的车流量检测技术得到了广泛的应用。本文对各种车流量检测方法进行了综述,并对基于视频图像的车流量检测研究工作进行了展望。 1 传统车流量检测方法 按照车辆信息获取方式的不同,实际应用当中已经产生了空气管道检测技术、磁感应检测技术和波频检测技术。 1.1 空气管道检测技术 空气管道检测是接触式的检测方法,在高速公路主线的检测点拉一条空心的塑料管道并作固定,一端封闭,另一端连接计数器,当车辆经过塑料管道时,车轮压到空气管道,管内空气被挤压而触动计数器进行计算车流量的方法。 显然,该方法只能获取单一的车辆信息,且方法繁琐,寿命短,已经被磁感应检测等技术所取代。 1.2 磁感应检测技术 磁感应检测器可分为线圈和磁阻传感器两种。环形线圈检测器是目前世界上应用最广泛的一种检测设备,由埋设在路表下的线圈和能够测量该线圈电感的电子设备组成。车辆通过线圈,引起线圈磁场的变化,检测器据此计算出车辆的流量、速度、时间占有率和长度等交通参数。图1利用一个LC振荡器和一个通用单片机即构成了感应线圈检测系统。当感应线圈的电感L发生变化时,LC振荡器的振荡频率也随之变化,由单片机获取其振荡频率并通过频率变化给出高/低电平信号来判断是否有车辆通过[5~6]。磁阻传感器的基本原理是在铁磁材料中会发生磁阻的非均质现像(AMR)。当沿着一条长且薄的铁磁合金带的长度方向施加一个电流,在垂直于电流的方向施
车流量检测技术综述 胡明亮1,李飞飞2 ,钟德浩3 (1、江西方兴科技有限公司,江西南昌330003) (2、江西省高等级公路管理局泰井管理处,江西南昌330003) (3、江西省高等级公路管理局瑞赣养护中心,江西南昌330003) 摘要:车流量检测是交通管理与控制的基础。在综述了车流量检测的传统方法、技术特点和 存在的问题后,重点分析了基于视频图像的车流量检测技术,并对其发展趋势进行了展望。 关键词:信息工程;视频图像;车流量检测;数字图像处理 0 前言 城市智能交通已逐步得到社会各界的广泛关注,如何通过智能交通系统建设来缓解日益严重的交通问题已成为交通领域的研究热点。车流量检测系统是智能交通(ITS)的基础部分,在城市道路建设、国道高速公路建设、隧道桥梁建设以及交通流的基础理论研究中占有很重要的地位。近年来,逐渐发展起来了以空气管道检测技术、磁感应检测技术、波频检测技术和视频检测技术等[1~2]为代表的多种交通检测技术[3]。车流量检测主要是通过各种传感设备对路面行驶车辆进行探测,获取相关交通参数,以达到对公路各路段交通状况及异常事件的自动检测、监控、报警等目的。 较其它方法而言,基于视频图像的检测技术涉及到视频采集、通信传输、图像处理、人工智能以及计算机视觉等多个学科,具有安装维修灵活、成本低、应用范围广、可拓展性强和交通管理信息全面等优点,并已经在国内外高速公路和公路的交通监控系统中得到应用。常用的基于视频图像的车辆检测算法有:灰度法、背景差法、相邻帧差法、边缘检测法[4]等。随着图像处理技术、计算机视觉、人工智能的发展和硬件处理速度的提高,基于视频图像的车流量检测技术得到了广泛的应用。本文对各种车流量检测方法进行了综述,并对基于视频图像的车流量检测研究工作进行了展望。 1 传统车流量检测方法 按照车辆信息获取方式的不同,实际应用当中已经产生了空气管道检测技术、磁感应检测技术和波频检测技术。 1.1 空气管道检测技术
佰誉达 车流量检测雷达 (本产品已通过国家道路交通安全产品质量监督检验中心公安部交通安全产品质量监督检测中心认证) 用户手册 佰誉达科技 深圳
目录 一、微波车流量检测雷达概述 (1) 1.1用途 (1) 1.2描述 (1) 1.3技术指标 (2) 1.3.1微波指标 (2) 1.3.2检测指标 (2) 1.3.3通信指标 (2) 1.3.4环境与可靠性指标 (2) 1.3.5电源指标 (2) 1.3.6物理指标 (3) 1.4应用领域 (3) 1.4.1路口模式(城市交通) (3) 1.4.2高速公路(城市交通、高速公路) (3) 1.5典型应用 (3) 1.5.1路口模式(城市交通) (3) 1.5.2路段模式(城市交通、高速公路) (4) 二、微波车流量检测雷达的安装 (6) 2.1设备组成 (6) 2.2设备安装 (6) 2.3工程安装 (7) 2.4雷达接口 (7) 三、微波车流量检测雷达的调试及使用 (7) 3.1软件运行环境 (7) 3.2软件安装 (8) 3.3软件使用说明 (8) 3.3.1主界面 (8) 3.3.2 设备参数 (8) 3.3.3雷达参数 (9) 3.3.4 安装参数 (9) 3.3.5 连接雷达 (10) 3.3.6按钮功能说明 (10) 3.3.7 车道计数 (11) 3.3.8 车道流量统计直方图 (11) 四、微波车流量检测雷达数据传输 (11) 4.1雷达数据传输模式 (11) 五、微波车流量检测雷达故障排除 (12) 附录1 (12)
一、微波车流量检测雷达概述 1.1用途 车流量检测雷达是拥有完全自主知识产权的新型微波车辆检测器,利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型等交通流基本信息的非接触式交通检测器。检测器主要应用于高速公路、城市快速路、普通公路交通流量调查站和桥梁的交通参数采集,为交通管理提供准确、可靠、实时的交通情报,为实现交通智能化提供技术支持。 1.2描述 车流量检测雷达是一种工作在微波频段的雷达探测器。雷达向路面连续发射线性调频微波波束,车辆通过微波波束时反射信号,根据反射信号检测目标是否存在并计算其交通参数。每隔一定时间(1s-1000s)将各种交通流参数信息通过数据通道传输到指挥控制中心。它能可靠的检测与区分公路上的任何车辆,包括从摩托车到多轴、高车身的车辆以及拖车等,检测路上每一车道所通过的车流量、车辆速度、车道占有率、车型分类等参数。 检测器雷达采用的是中心频率为24GHz的微波信号,因此具有高频微波的所有特性,自主开发的雷达信号分析处理算法检测精度高,检测范围宽,可以跨越道路中央隔离带的防眩板、树丛及金属护栏等障碍物检测到驶过的车辆,大大降低了隔离带对检测精度的影响。同时,由于微波对环境干扰不敏感,使得其在各种天气气候条件下都保持准确的检测。 检测器采用了创新的软件设计理念,将车道的静态划分和动态划分结合起来,在使用前静态划分车道,并在使用中根据车流的实际情况调整车道的划分,对跨车道行驶的车辆可通过模糊判断,合理的将该车划分到最近的一个车道,而不会检测为两辆车,解决了城市复杂交通情况下的应用问题。 综合来说主要有以下特点: 1)自主研发,可根据需求更改数据输出接口和协议,且支持远程软件控制; 2)安装方便,维护简单。 3)高适应性,在恶劣气候条下稳定工作,不受风、雨、雾、冰雹等影响。 4)自动车道识别功能,实现0后置距离的安装。
车载车流量监控系统使用说明书
1. 车载车流量监控系统 随着现代社会人民生活水平的提高,经济的快速发展,交通拥挤、道路阻塞频繁发生,为了阻止交通拥堵现象的进一步恶化,各国政府启动智能交通计划。 智能交通系统的关键在于交通信息的采集,开发成本低、可大量布设到各个路口的基于无线传感器网络的车流量监控系统,通过控制交叉口合适的信号参数,使不同方向的车流在时间上隔离,控制车流的运行秩序,实现交叉口车辆运行的安全、有序,是解决交通拥挤的一种基本手段。 2.车载车流量监控系统编写背景、目的及意义 2.1编写背景 在汽车内安装无线通信模块,使汽车通过自身安装的传感器节点或道路基础设施上安装的无线传感器节点感知行驶途中的各种信息,已经成为提高行驶安全和城市的交通性能的一种重要手段。[1]大量的车辆传感器节点通过车上以及道路基础设施上安装的无线通信设备,可构成车载无线传感器网络[2],通过车辆之间的中继传输得到全面的城市交通信息。 车载无线网络可以让行驶者或交管部门得到车辆的状态数据和城市的交通数据。车辆状态数据包括行驶时的各种内在状态、比如位置或快慢等;交通数据包括交通流量或路面状况等。除了车上安装的传感装置外,驾驶员也可以通过对道路和交通的观察,获知复杂事件,如发生的交通事故、比较危险的路段等即时事件。 世界各国的研究机构在近年来对车载无线传感器网络持续关注,美国联邦通信委员会(FCC)1999年在5.9GHz的频谱上为智能交通通信分配了75MHz的带宽[3],并制定了DSRC协议。这个75MHz的频带包括了7个10MHz的信道,另外还提供了1个信道用于传递控制信息和6个信道传递服务信息。DSRC协议是一个
本申请实施例涉及轨道检测技术领域,具体地,涉及一种动态轨道几何状态测量系统。该动态轨道几何状态测量系统包括:行走机构,用于沿待测量轨道移动;测量基准,用于建立坐标系;测量机构,用于检测所述待测量轨道在所述坐标系中的坐标值、角度值、以及所述待测量轨道的轨距和轨道里程;控制装置,用于获取所述测量机构的测量数据,并根据获取的测量数据计算所述待测量轨道的坐标、姿态信息、轨距以及轨道里程。上述动态轨道几何状态测量系统具有检测速度快和检测效率高的特点。 权利要求书 1.一种动态轨道几何状态测量系统,其特征在于,包括: 行走机构,用于沿待测量轨道移动; 测量基准,用于建立坐标系;
测量机构,用于检测所述待测量轨道在所述坐标系中的坐标值、角度值、以及所述待测量轨道的轨距和轨道里程; 控制装置,用于获取所述测量机构的测量数据,并根据获取的测量数据计算所述待测量轨道的坐标、姿态信息、轨距以及轨道里程。 2.根据权利要求1所述的动态轨道几何状态测量系统,其特征在于,所述行走机构包括车体以及安装于所述车体底部的车轮。 3.根据权利要求2所述的动态轨道几何状态测量系统,其特征在于,所述测量基准包括在所述待测量轨道两侧对称设置的多对CPⅢ控制点和固定安装于所述车体顶部的目标棱镜。 4.根据权利要求3所述的动态轨道几何状态测量系统,其特征在于,在每个CPⅢ控制点设置有CPⅢ棱镜,所述CPⅢ棱镜的反射面正对所述全站仪。 5.根据权利要求4所述的动态轨道几何状态测量系统,其特征在于,在每个所述CPⅢ控制点设置有预埋套筒,所述CPⅢ棱镜插设于所述预埋套筒内。 6.根据权利要求5所述的动态轨道几何状态测量系统,其特征在于,在所述车体的顶部固定连接有支撑杆,在所述支撑杆的顶部固定安装有卡具; 所述目标棱镜固定安装于所述卡具上。 7.根据权利要求6所述的动态轨道几何状态测量系统,其特征在于,所述测量机构包括全站仪、惯性导航仪、旋转编码器以及距离传感器; 所述待测量轨道分为沿其延伸方向的多个测量单元; 所述全站仪用于测量所述测量单元的起点和终点的坐标信息; 所述惯性导航仪固定安装于所述车体的顶部,用于测量所述行走机构的角速度信息和线加速
毕业设计(论文)开题报告
1 选题的背景和意义 1.1 选题的背景 在全球面临着能源和环境双重危机的严峻挑战下世界各国汽车企业都在寻求新的解决方案一一如开发新能源技术,发展新能源汽车等等然而. 新能源汽车在研发过程中已出现!群雄争霸的局面在能源领域. 有压缩天然气,液化石油气,煤炼乙醇,植物乙醇,生物乙醇,,生物柴油,甲醇,二甲醚,合成油等等新能源动力汽车在转换能源方面有燃料电池汽车氢燃料汽车纯电动汽车轮毅电机车等等。选择哪种新能源技术作为未来汽车产业发展的主要方向是摆在中国汽车行业面前的重要课题。据有关专家分析进入新世纪以来,以汽车动力电气化为主要特征的新能源电动汽车技术突飞猛进。其中油电混合动力技术逐步进入产业化锂动力电池技术取得重大突破。新能源电动汽车技术的变革为我国车用能源转型和汽车产业化振兴提供了历史机遇[1]。 作为 21 世纪最清洁的能源———电能,既是无污染又是可再生资源,因此电动汽车应运而生,随着人民生活水平和环保觉悟的提高电动汽车越来越受到广泛关注[2]。传统车辆的转向、驱动和制动都通过机械部件连接来操纵,而在电动汽车中,这些系统操纵机构中的机械部件(包括液压件)有被更紧凑、反应更敏捷的电子控制元件系统所取代的趋势。加上四轮能实现± 90°偏转的四轮转向技术,车辆可实现任意角度的平移,绕任意指定转向点转向以及进行原地旋转。线控和四轮转向的有机结合,是当今汽车新技术领域的一大亮点,其突出特点就是操纵灵活和行驶稳定[3]。轮毂电机驱动电动车以其节能环保高效的特点顺应了当今时代的潮流,全方位移动车辆是解决日益突出的城市停车难问题的重要技术途径,因此,全方位移动的线控转向轮毂电机驱动电动车是未来先进车辆发展的主流方向之一。全方位移动车辆可实现常规行驶、沿任意方向的平移、绕任意设定点、零半径原地转向等转向功能[4]。 1.2 国内外研究现状及发展趋势 电动汽车的出现得益于19世纪末电池技术和电机技术的发展较内燃机成熟,而此时石油的运用还没有普及,电动车辆最早出现在英国,1834年Thomas Davenport 在布兰顿演示了采用不可充电的玻璃封装蓄电池的蓄电池车,此车的出现比世界上第一部内燃机型的汽车(1885年)早了半个世纪。1873年英国人Robert Davidson制造的一辆三轮车,它由一块铁锌电池向电机提供电力,这被认为是电动汽车的诞生,这也比第一部内燃机型的汽车早出现了13年。到了1881年,法国人Gustave Trouve 使用铅酸电池制造了第一辆能反复充电的电动汽车。此后三四十年间,电动汽车在当时的汽车发展中占据着重要位置,据统计,到1890年在全世界4200辆汽车中,有
西南交通大学 毕业设计(论文) 基于视频的车流量检测算法研究 专业: 自动化 指导老师: 侯进 二零一零年六月
西南交通大学本科毕业设计(论文)第I页 院系信息科学与技术学院专业自动化 年级2006级姓名安伟 题目基于视频的车流量检测算法研究 指导教师 评语 指导教师(签章) 评阅人 评语 评阅人(签章) 成绩 答辩委员会主任(签章) 年月日
毕业设计任务书 班级自动化2班学生姓名安伟学号2006 专业自动化 发题日期:2010 年1月1 日完成日期:2010 年6 月15 日 题目基于视频的车流量检测算法研究 题目类型:工程设计√技术专题研究理论研究软硬件产品开发 一、设计任务及要求 车流量信息是交通控制中的重要信息,其检测在智能交通系统中占有重要地位。基于视频图像处理技术的车流量检测系统,通过安装在道路旁边或者中间隔离带的支架上的摄像机和图像采集设备将实时的视频信息采入,经过对视频图像的处理分析可以进行车流量的实时检测。基于视频的车流量检测系统有易安装、维护及实现方便等明显的优势,非常有利于交通系统的管理及控制。具体要求如下: 1. 对图像进行预处理 2. 进行车流量的统计 3. 人机界面简单清楚友好 二、应完成的硬件或软件实验 采集视频图像,对图像进行分析处理,完成车流量的统计,与实际通过车辆数目比较,分析本系统的正确检测率。 三、应交出的设计文件及实物(包括设计论文、程序清单或磁盘、实验装置或产品等) 1. 毕业设计论文(必须完全符合学校规范,内容严禁有丝毫的抄袭剽窃) 2. CD-R(含论文,程序,程序使用说明书,演示视频,盘面注明姓名,专业,日期) 3. 英文翻译按学校规定,导师无特殊要求
基于MAT LAB 的汽车制动系统 3 设计与分析软件开发 孙益民(上汽汽车工程研究院 【摘要】根据整车制动系统开发需要, 利用MAT LAB 平台开发了汽车制动系统的设计和性能仿真软件。 该软件用户界面和模块化设计方法可有效缩短开发时间, 提高设计效率。并以上汽赛宝车为例, 对该软件的可行性进行了验证。 【主题词】制动系汽车设计 统分成两个小闭环系统, 使设计人员更加容易把 1引言 制动性能是衡量汽车主动安全性的主要指标。如何在较短的开发周期内设计性能良好的制动系统一直是各汽车公司争相解决的课题。 本文拟根据公司产品开发工作需要, 利用现有MA T LAB 软件平台, 建立一套面向设计工程师, 易于调试的制动开发系统, 实现良好的人机互动, 以提高设计效率、缩短产品开发周期。 握各参数对整体性能的影响, 使调试更具针对性。 其具体实施过程如图1所示。 3软件开发
与图1所示的制动系统方案设计流程对应, 软件开发也按照整车参数输入、预演及主要参数确定, 其他参数确定和生成方案报告4个步骤实现。3. 1车辆参数输入 根据整车产品的定位、配置及总布置方案得出空载和满载两种条件下的整车质量、前后轴荷分配、质心高度, 轮胎规格及额定最高车速。以便获取理想的前后轴制动力分配及应急制动所需面临的极限工况。 3. 2预演及主要参数确定 在获取车辆参数后, 设计人员需根据整车参数进行制动系的设计, 软件利用MAT LAB 的G U I 工具箱建立如图2所示调试界面。左侧为各主要参数, 右侧为4组制动效能仿真曲线, 从曲线可以查看给定主要参数下的制动力分配、同步附着系数、管路压力分配、路面附着系数利用率随路况的变化曲线, 及利用附着系数与国标和法规的符合现制动器选型、性能尺寸调节, 查看液压比例阀、感载比例阀、射线阀等多种调压工况的制动效能, 并通过观察了 2汽车制动系统方案设计流程的优化 从整车开发角度, 制动系统的开发流程主要包括系统方案设计、产品开发和试验验证三大环节。制动系统的方案设计主要包含结构选型、参数选择、性能仿真与评估, 方案确定4个环节。以前, 制动系统设计软件都是在完成整个流程后, 根据仿真结果对初始设计参数修正。因此, 设计人员往往要反复多次方可获得良好的设计效果, 而且, 在调试过程中, 一些参数在特定情况下的相互影响不易在调试中发现, 调试的尺度很难把握。 本文将整车设计流程划分为两个阶段:主要参数的预演和确定、其他参数的预演和参数确定。即根据模块化设计思想, 将原来一个闭环设计系 收稿日期:2004-12-27 3本文为上海市汽车工程学会2004年(第11届学术年会优秀论文。
车流量检测系统设计 随着我国经济的快速发展交通安全的有效保障显得尤其重要,并且对交通管理的要求越来越高。与此同时各种各样的道路监控设备也应运而生。雷达监控系统视频监控系统地表传感系统激光检测系统等相继应用。由此计算机科学与现代通信等高新技术运用于交通监控管理与车辆控制以保障交通顺畅及行车安全。而实时获取交通车流量的车辆检测技术是是进行交通管理必不可少的一个步骤。随着我国城市车辆使用的增多道路状况同时也变得复杂如何对道路车流量进行实时监控对统计、预测道路交通状况十分重要并且同时这也是对道路车辆运行情况高效调度的一项十分的重要参考依据。而且当前对道路监测多使用视频方法有事还可能采用人工计数方法此方法对每条公路在某个时间段车辆行驶情况不容易做到长时间、高效的统计。因此我们需要进行一种低成本、高准确率的智能识别装系统的设计由此促进对高速路口交通情况的检测水准。 本文设计了一种基于A T89C51单片机的车速检测系统。其主要原理是将红外传感器测得的电平信号传递到单片机中通过单片机判断处理、计数等功能实现车流量的检测。本系统传感电路采用的的是红外传感矩阵利用单片机实时对传感器的输出数据进行连续读取通过特定的算法处理数据然后送显示或者发出报警信号。本系统致力于为路口车流量的监控服务从而形成对路口行车的科学管理减少交通事故的发生。 1、工作原理及总体方案选择 1.1车流量监测系统的工作原理 红外线矩阵法是一种利用红外传感器组成的红外线矩阵检测设备检测道路上机动车流量和车速的方法。它是利用红外线发射和接收方向较强的特点在车辆经过的路面上安装密度适当的几排红外线发射接收电路由此组成红外线矩阵红外线检测矩阵由两排嵌入路面内的接收器和安装在其上方几米处的发射器组成两排接收器之间的距离为0.5到2米每排接收器由若干间隔0.2到0.9米的接收管和接收电路组成。接收管在没有遮挡的情况下可以接收发射器发出的信号接收电路中产生低电平接收管在受到遮蔽的状况下下收不到发射器发出的信号接收电路中出现高电平信号。因此根据车辆驶入、通过、驶出检测区域以及车辆行驶方向并排行驶车辆的流量等情况引起的矩阵内部各测试点高低电平信号的变化经过硬件电路设计和软件编程计算方法,最终统计计算出经过该测量区域内双向并排经过的多辆车的车流量测量。 1.1.1系统总体模块设计 本系统是利用单片机并且采用模块化设计来设计车流量检测系统只要有车辆经过就会挡住两个发射和接收红外线传感器之间的传感信号这样就能根据车量的流动情况对车流量进行检测。当然对于正常的情况下还会有并行的车量经过本系统也做了设计。系统的总体模块图如下图1
第1章绪论 1.1制动系统设计的意义 汽车是现代交通工具中用得最多,最普遍,也是最方便的交通运输工具。汽车制动系是汽车底盘上的一个重要系统,它是制约汽车运动的装置。而制动器又是制动系中直接作用制约汽车运动的一个关键装置,是汽车上最重要的安全件。汽车的制动性能直接影响汽车的行驶安全性。随着公路业的迅速发展和车流密度的日益增大,人们对安全性、可靠性要求越来越高,为保证人身和车辆的安全,必须为汽车配备十分可靠的制动系统。 通过查阅相关的资料,运用专业基础理论和专业知识,确定汽车制动器的设计方案,进行部件的设计计算和结构设计。使其达到以下要求:具有足够的制动效能以保证汽车的安全性;同时在材料的选择上尽量采用对人体无害的材料。 1.2制动系统研究现状 车辆在行驶过程中要频繁进行制动操作,由于制动性能的好坏直接关系到交通和人身安全,因此制动性能是车辆非常重要的性能之一,改善汽车的制动性能始终是汽车设计制造和使用部门的重要任务。当车辆制动时,由于车辆受到与行驶方向相反的外力,所以才导致汽车的速度逐渐减小至零,对这一过程中车辆受力情况的分析有助于制动系统的分析和设计,因此制动过程受力情况分析是车辆试验和设计的基础,由于这一过程较为复杂,因此一般在实际中只能建立简化模型分析,通常人们主要从三个方面来对制动过程进行分析和评价: (1)制动效能:即制动距离与制动减速度; 1
(2)制动效能的恒定性:即抗热衰退性; (3)制动时汽车的方向稳定性; 目前,对于整车制动系统的研究主要通过路试或台架进行,由于在汽车道路试验中车轮扭矩不易测量,因此,多数有关传动系!制动系的试验均通过间接测量来进行汽车在道路上行驶,其车轮与地面的作用力是汽车运动变化的根据,在汽车道路试验中,如果能够方便地测量出车轮上扭矩的变化,则可为汽车整车制动系统性能研究提供更全面的试验数据和性能评价。 1.3制动系统设计内容 (1)研究、确定制动系统的构成 (2)汽车必需制动力及其前后分配的确定 前提条件一经确定,与前项的系统的研究、确定的同时,研究汽车必需的制动力并把它们适当地分配到前后轴上,确定每个车轮制动器必需的制动力。 (3)确定制动器制动力、摩擦片寿命及构造、参数 制动器必需制动力求出后,考虑摩擦片寿命和由轮胎尺寸等所限制的空间,选定制动器的型式、构造和参数,绘制布置图,进行制动力制动力矩计算、摩擦磨损计算。 (4)制动器零件设计 零件设计、材料、强度、耐久性及装配性等的研究确定,进行工作图设计。 1.4制动系统设计要求 制定出制动系统的结构方案,确定计算制动系统的主要设计参数制动器主要参数设计和液压驱动系统的参数计算。利用计算机辅助设计绘制装配图 2
山东建筑大学 课程设计说明书 题目:监控视频中道路车流量检测系统设计课程:数字图像处理课程设计 院(部):信息与电气工程学院 专业:电子信息工程 班级:电信 学生姓名: 学号: 指导教师: 完成日期:2013年6月
目录 摘要································································································II 1 设计目的 (1) 2 设计要求 (1) 3 设计内容 (2) 3.1运动车辆检测算法比较 (2) 3.2形态学滤波 (5) 3.3车辆检测 (6) 3.4车辆计数 (9) 3.5软件设计 (9) 总结与致谢 (10) 参考文献 (11) 附录 (12)
摘要 获得实时的交通信息是当前各种检测方式的前提,但是现有的信息采集方式并不能满足交通管理与控制的需求。随着计算机技术的快速发展,基于视频的检测技术在交通中得到了广泛的应用,同其它检测方式相比,它具有检测范围大、设置灵活、安装维护方便、检测参数多等优点。基于图像处理的视频检测方式近年来发展很快,已成为当今智能交通系统的一个研究热点。本论文对视频交通流运动车辆检测的内容进行了深入地研究。结合视频图像详细的介绍了视频检测中的背景更新、阴影去除、车辆分割等关键技术和算法,介绍了视频检测的方法。最后在MATLAB的平台上进行了系统实现设计。实验结果表明,该算法具有一定的可行性,能够快速的将目标参数检测出来关键词:MATLAB;帧间差法;车辆检测
随着经济的发展,人民生活水平的提高,汽车保有量大幅增加,怎样安全高效地对交通进行管理,就显得非常重要.解决这一问题的关键是建立智能交通系统(ITS),其中车辆检测系统是智能交通系统的基础.它为智能控制提供重要的数据来源 作为ITS的基础部分,车辆检测系统在ITS中占有很重要的地位,目前基于视频的检测法是最有前途的一种方法,它是通过图像数字的方法获得交通流量信息,主要有以下优点:(1)能够提供高质量的图像信息,能高效、准确、安全可靠地完成道路交通的监视和控制工作.(2)安装视频摄像机破坏性低、方便、经济.现在我国许多城市已经安装了视频摄像机,用于交通监视和控制.(3)由计算机视觉得到的交通信息便于联网工作,有利于实现道路交通网的监视和控制.(4)随着计算机技术和图像处理技术的发展,满足了系统实时性、安全性和可靠性的要求 2 设计要求 通过对视频流中的车辆进行检测和跟踪,准确地统计每个车道流量、平均车速、平均车道占有率、车队长度、平均车间距等信息为交通规划,交通疏导和车辆动态导航领域提供一系列指导。 设计车辆检测与识别方法和车流量统计方法,实现监控视频中道路车流量检测。通过实验验证检测精度。
摘要 Formula SAE比赛由美国车辆工程师学会(SAE)于1979年创立,每年在世界各地有600余支大学车队参加各个分站赛,2011年将在中国举办第一届中国大学生方程式赛车,本设计将针对中国赛程规定进行设计。 本说明书主要介绍了大学生方程式赛车制动的设计,首先介绍了汽车制动系统的设计意义、研究现状以及设计目标。然后对制动系统进行方案论证分析与选择,主要包括制动器形式方案分析、制动驱动机构的机构形式选择、液压分路系统的形式选择和液压制动主缸的设计方案,最后确定方案采用简单人力液压制动双回路前后盘式制动器。除此之外,还根据已知的汽车相关参数,通过计算得到了制动器主要参数、前后制动力矩分配系数、制动力矩和制动力以及液压制动驱动机构相关参数。最后对制动性能进行了详细分析。 关键字:制动、盘式制动器、液压
Abstract Formula SAE race was founded in 1979 by the American cars institute of Engineers every year more than 600 teams participate in various races around the world,China will hold the first Formula one for Chinese college students,the design will be for design of the provisions of the Chinese calendar. This paper mainly introduces the design of breaking system of the Formula Student.First of all,breaking system's development,structure and category are shown,and according to the structures,virtues and weakness of drum brake and disc brake analysis is done. At last, the plan adopting hydroid two-backway brake with front disc and rear disc.Besides, this paper also introduces the designing process of front brake and rear break,braking cylinder,parameter's choice of main components braking and channel settings and the analysis of brake performance. Key words:braking,braking disc,hydroid pressure
上海工程技术大学 毕业设计(论文) 开题报告 题目SY1046载货汽车制动系统设计 汽车工程学院(系)车辆工程专业班 学生姓名 学号 指导教师 开题日期:2016 年3 月14 日
开题报告 一、毕业设计题目的来源、理论、实际意义和发展趋势 1、题目:SY1046载货汽车制动系统设计 2、题目来源:生产实践 3、意义: 从汽车诞生时起,车辆制动系统在车辆的安全方面就扮演着至关重要的角色。近年来,随着车辆技术的进步和汽车行驶速度的提高,这种重要性表现得越来越明显。汽车制动系统种类很多,形式多样。传统的制动系统结构型式主要有机械式、气动式、液压式、气-液混合式。它们的工作原理基本都一样,都是利用制动装置,用工作时产生的摩擦热来逐渐消耗车辆所具有的动能,以达到车辆制动减速,或直至停车的目的。伴随着节能和清洁能源汽车的研究开发,汽车动力系统发生了很大的改变,出现了很多新的结构型式和功能形式。新型动力系统的出现也要求制动系统结构形式和功能形式发生相应的改变,例如电动汽车没有内燃机,无法为真空助力器提供真空源,一种解决方案是利用电动真空泵为真空助力器提供真空。[1]制动系统在汽车中是非常重要的,当一辆车在高速上行驶的时候,制动系统突然出现问题导致汽车无法制动,这个是非常危险的,国内很多报道都报道过,某某车辆由于制动系统失灵出现了严重的事故,制动系统作用是:使行驶中的汽车按照驾驶员的要求进行强制减速甚至停车;使已停驶的汽车在各种道路条件下(包括在坡道上)稳定驻车;使下坡行驶的汽车速度保持稳定。对汽车起制动作用的只能是作用在汽车上且方向与汽车行驶方向相反的外力,而这些外力的大小都是随机的、不可控制的,因此汽车上必须装设一系列专门装置以实现上述功能。 2013年7月14日至2014年3月1日期间生产的2013款翼虎汽车,共计191368辆。被福特召回,原因是由于制动真空助力器密封圈缺少润滑油脂,导致密封圈过早磨损,极端情况下密封圈会与隔板分离,导致制动踏板变硬,车主会感觉到真空助力不足从而需要更用力地踩刹车,存在安全隐患。长安福特汽车有限公司将为召回范围内的车辆免费检查并更换有潜在风险的制动真空助力器,以消除安全隐患。 可想而知,汽车拥有传动系统、制动系统、行走系统、转向系统,而可以看出,制动系统是汽车四大系统之一。 本课题研究的是SY1046载货汽车制动系统的设计,这个制动系统对整车来言是重要部件之一,设计的要求双管路前、后鼓式制动系统,进行动力分配,同时进行相关关键部件的校核运算。本设计能充分体现大学期间的知识掌握程度和创新思想,具有重要意义。 4、国内外研究现状与趋势 (1)国外研究现状与趋势:已经普遍应用的液压制动现在已经是非常成熟的技术,随着人们对制动性能要求的提高,防抱死制动系统、驱动防滑控制系统、电子稳定性控制程序、主动避撞技术等功能逐渐融人到制动系统当中,需要在制动系统上添加很多附加装置来实现这些功能,这就使得制动系统结构复杂化,增加了液压回路泄漏的可能以及装配、维修的难度,制动系统要求结
文章编号:100128220(2004)0420404205 基于视频的车流量检测 ①彭仁明1,贺春林2 (11四川绵阳职业技术学院,四川绵阳621000;21西华师范大学计算机学院,四川南充637002) 摘 要:介绍了目前基于视频的车辆检测算法的优点和缺点,在此基础上提出了一种新的算法,该算法自适应能力强,计算量小,可正确判断有无车辆、完成车辆的计数,实现车流量计算、车速估计.采用了预估校正和相关性修正等措施,提高了检测精度,为交通监控系统提供实时有效的交通参数. 关键词:视频;数据流;相关性;修正 中图分类号:TP399 文献标识码:A 1 引 言 随着经济的发展,人民生活水平的提高,汽车保有量大幅增加,怎样安全高效地对交通进行管理,就显得非常重要.解决这一问题的关键是建立智能交通系统(ITS ),其中车辆检测系统是智能交通系统的基础.它为智能控制提供重要的数据来源[1-3]. 作为ITS 的基础部分,车辆检测系统在ITS 中占有很重要的地位,目前基于视频的检测法是最有前途的图1 检测算法流程Fig.1 The flow of defection alg orithm 一种方法,它是通过图像数字的方法获得交通流量信息, 主要有以下优点:(1)能够提供高质量的图像信息,能高 效、准确、安全可靠地完成道路交通的监视和控制工作. (2)安装视频摄像机破坏性低、方便、经济.现在我国许多 城市已经安装了视频摄像机,用于交通监视和控制.(3) 由计算机视觉得到的交通信息便于联网工作,有利于实 现道路交通网的监视和控制.(4)随着计算机技术和图像 处理技术的发展,满足了系统实时性、安全性和可靠性的 要求. 目前常用的基于视频的车辆检测方法主要有:灰度 比较法、背景差法、帧差法、边缘检测法.灰度比较法采用 对路面和车辆的灰度统计值来检测车辆.但它对环境光 线的变化十分敏感.背景差法计算当前输入帧与背景图 像的差值,以提取车辆,但背景图像需实时刷新[3],其检 测精度很大程度上依赖于背景图像的可靠性.帧差法是 将相邻两帧相减,对保留的运动车辆信息进行检测,环境 光线变化对其影响不大[4].然而当摄像头的抖动引起相 邻两帧背景点的相应“抖动”时,该方法不能完全将背景 滤除,从而引起误判,而且对于静止或车速过慢的车辆, 该方法不能有效检测.边缘检测法能够在不同的光线条 件下检测到车辆的边缘,利用车体的不同部件、颜色等提 供的边缘信息可进行静止和运动车辆的检测[5],但是对①收稿日期:2004-09-02 作者简介:彭仁明(1969-),男,四川广安人,绵阳职业技术学院讲师,主要从事电子类教学和科研工作. 第25卷Vol 125 第4期No 14西华师范大学学报(自然科学版)Journal of China West Normal University (Natural Sciences )2004年12月Dec 12004