无线遥控方案
1. 要实现的目标 遥控距离:200M
遥控响应时间:低于100ms 频率范围:400M ~ 470M 信道个数:16个
通信速率:30000~40000 较强的绕射能力 高可靠性 2.
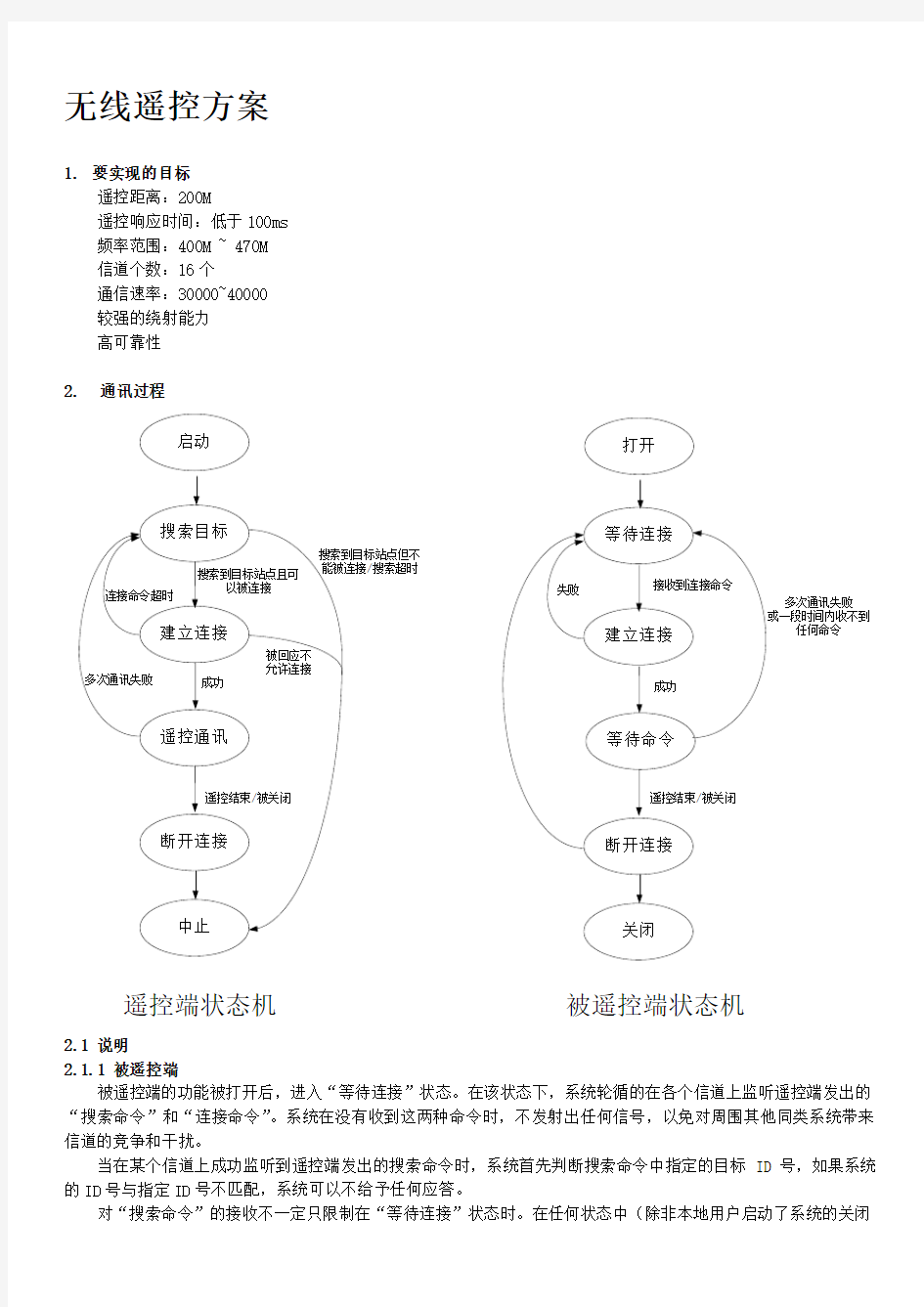
通讯过程
多次通讯失败任何命令
遥控端状态机被遥控端状态机
/搜索超时
2.1 说明
2.1.1 被遥控端
被遥控端的功能被打开后,进入“等待连接”状态。在该状态下,系统轮循的在各个信道上监听遥控端发出的“搜索命令”和“连接命令”。系统在没有收到这两种命令时,不发射出任何信号,以免对周围其他同类系统带来信道的竞争和干扰。
当在某个信道上成功监听到遥控端发出的搜索命令时,系统首先判断搜索命令中指定的目标ID 号,如果系统的ID 号与指定ID 号不匹配,系统可以不给予任何应答。
对“搜索命令”的接收不一定只限制在“等待连接”状态时。在任何状态中(除非本地用户启动了系统的关闭
过程),只要成功接收到针对本系统ID的“搜索命令”,都可以给予应答。如果系统已被连接到另一个遥控端,则在“搜索命令”的应答中给予指示。这样可以防止遥控端发出连接命令。
当在“等待连接”状态中收到“连接命令”时,将进入“建立连接”过程。系统将通过接收到的“连接命令”中一些参数(可以包含一些认证信息)来判断是否与遥控端建立连接。不管接受或不接受“连接命令”都要求向遥控端发出一个应答。
如果建立连接成功了,系统将进入“等待命令”状态。在该状态下,如果较长时间内收不到来自已经建立连接的遥控端的任何命令(接收不到命令的情况包括:收不到或收到很弱的无线电信号;被严重干扰的,效验错误的数据),系统将退回到“等待连接”状态,以备再次建立连接。
为了保证连接的双方能够感知到对方的存在和信道的可用性,在遥控端没有任何遥控命令的情况下,遥控端必须每隔一段时间,发送一次“保持连接”命令。也可以设计一些其它在空闲时间使用的命令,例如获取被遥控端所处位置的信道状态信息。
当接收到连接遥控端发出的“断开连接”的命令时,进入断开连接过程。遥控端必须立即回应该命令。然后再次进入“等待连接”状态。
如果是由本地用户启动了系统的关闭过程(例如:关机),这时系统可以主动通知遥控端断开连接。
2.1.2 遥控端
系统被启动一次遥控任务后,进入“搜索目标”状态。在该状态下,系统轮循的向各个信道发出“搜索命令”。在每次发出命令后,系统立即切换到接收状态以接收可能的应答。如果在某个信道上接收到目标端的应答,且该端点可以被连接,将进入“建立连接”过程。如果接收到目标端的应答,但应答数据中指示该端点不能被连接(可能是目标端已经和其他遥控端已经建立连接),则可以结束此次遥控任务。
如果目标端不在遥控端的信号范围内,或者每个信道的可用性都非常糟糕,那么有可能导致遥控端在一段时间内的发出的“搜索命令”都收不到正确的应答。当出现这样的超时情况时,将中止此次遥控任务。
在“建立连接”的过程中,系统向目标端发送“连接”命令。如果成功接收到“连接”命令的应答,而且应答数据中指示连接成功,则连接已被建立。此后,系统进入“遥控通讯”状态。在此过程中,可能出现目标端点没有任何回应(可能是信道可用信很差,或发送命令时目标端已经跳到另外一个信道),这时系统将退回到“搜索目标”状态。如果系统被回应的应答数据中指示不允许被连接(可能是目标端已经和其他遥控端建立了连接,或认证信息没有被通过),那么这次遥控任务将被中止。
进入“遥控通讯”状态后,系统将用户发出的遥控指令发射给目标端。如果一段时间内,用户没有发出任何遥控指令,系统将自动的定时的向目标端发射“保持连接”命令。所有发出的命令,都要求目标端立即回应应答。如果发送完命令后,在一段时间内没有成功接收到目标端的应答,系统将重复发送命令。如果,重发了多次后,一直没成功接收到目标端的应答,系统将可以判断为与目标端失去了连接。此后系统将退回到“搜索目标”状态,准备再次进行连接。
如果连接建立后(“遥控通讯”状态),这时用户要求结束遥控任务,将进入断开连接过程。这个过程中,系统向目标端发出一个“断开连接”的命令,而且也等待目标端的应答,但等待超时后不必采取重发措施。
3.可靠性问题
3.1 通信信道的选择
常见的无线收发器件中一般都存在CS(Carrier Sense)和RSSI(Received Signal Strength Indicator)的功能。我们可以利用这些功能来确定一个信道的可用性(被占用情况或干扰程度)。
建立连接前,不论是遥控端发出“搜索目标”命令,还是被遥控端监听命令,都应尽可能的在较好的信道中进行。我们可以采取这样的办法:当系统(遥控端或被遥控端)轮循到一个可用性较好的信道时,停留的时间可以延长一点。在轮循到一个较差的信道时,停留的时间可以缩短一点。
当建立连接后,在通信过程中可能出现信道被干扰或者与同类系统通信相冲突等信道可用性降低的情况。这时可以切换到另外一个较好的信道。这要求通信双方在建立连接后,还能对各个信道进行检测和统计。然后,遥控端可以采取一种通信协议或安排一种命令获取到目标端的信道检测和统计数据。遥控端根据这些数据来决定是否进行切换和切换到哪个信道。
还有一种情况,可能发生在建立连接后的某个时刻。信道被干扰或其他无线通讯系统长时间的连续的占据,以至遥控端无法通知目标端进行信道切换。这时,要求通讯双方能同时的切换到另一个相同的信道。这个信道要求通讯双方事先协商好。这点也必须基于前面所述的对各个信道进行检测和统计。
以上描述可以看成是一种跳频策略。与一般的FH 系统(Frequency Hopping System)相比,统计性代替了随机性。如果使用一般的FH 策略,一旦发生跳频时失去同步的情况,将可能导致遥控器在较长的时间内失灵。
3.2 采用CSMA/CA 机制
考虑到在系统附近范围内可能存在多个同类系统,并且与这些系统存在使用相同信道的可能,有必要采用CSMA/CA (Carrier Sense Multiple Access with Collision Avoidance )机制来防止冲突发生和解决冲突问题。 在802.11(主要应用于无线局域网)和802.15.4(主要应用于Zigbee )中,都采取了CSMA/CA 机制。这种机制在一些点到点的无线通信中也比较常见。其过程是:
(1)数据发送就绪时,先检查信道是否被占用。
(2)如果信道被占用,则等到介质空闲后,再随机退避一段时间,重复(1)过程。 (3)发送数据。
(4)等待接收者应答。如果,等待应答超时,则重复(1)过程。如果成功接收到应答,则此次发送过程成功结束。
出现冲突的可能性分析
说明:
接收或监听载波时间发送就绪时,信道判断时刻收发模式切换时间和其它延时发送数据时,占用信道的时间
由上图可知,发生冲突的主要原因是从接收或监听状态切换到数据发送时刻,需要经历一定的时间。在这段时间内,可能被其他同类系统认为是信道空闲且启动了发送过程。如果使用CSMA/CA 机制并采用随机退避时间办法,降低冲突发生的概率的办法有两种:1)加大退避时间的最大值。2)降低收发模式切换时间。
在一定范围内和同一个信道中,越多的同类系统,冲突发生的概率也会越高。即使通过了载波检测,避免了一次或多次冲突,也会增加数据发送的延时。
要降低冲突的发生,还可以把CSMA/CA 机制设计的更智能一点。类似于802.11中的VCS(Virtual Carrier Sense ,基于CSMA/CA)技术。这要求系统不仅要检测信道的空闲状态,还要接收同类系统发出的数据包,并且分析出同类系
统通讯将持续的时间,然后退避这段时间。
还有一种CSMA/CA 机制失效的可能性。如下图所示:
A 和
B 都在相互信号能够到达的范围内。但A 的信号不能到达D ,D 的信号也不能到达A ,而且D 的信号可以覆盖到B 。这时A 不能检测到D 对信道占用的情况。如果A 向B 发送数据时,D 正好也在发送数据,那么就会产生冲突。要解决这个问题,可以把上述几个站点的发射功率加大,让它们都能检测和接收到每个站点发出的信号。这样
有点类似于一个无线网络。
3.3 校验和应答机制
上述CSMA/CA机制必须基于校验和应答的机制。能够采用CSMA/CA机制的前提是同一个信道中存在同类系统或同样采取CSMA/CA机制的系统。如果信道中存在一些其他干扰,校验和应答机制将是保证传输可靠的关键。
遥控端和被遥控端所发的数据包,都要求使用一种校验码。最常见的是CRC校验码。通讯双方收到数据包只有通过了校验码校验无误后,才能算成功接收。否则,将收到的数据包丢弃,和没收到数据包的情况一样。
遥控端和被遥控端采用一种命令和应答的机制,或者说是一种Master和Slave的关系。建立连接后,遥控端向被遥控端发出的所有命令(断开连接命令除外),都要求被遥控端尽快返回应答。如果遥控端在一段时间内,没有收到被遥控端的应答,则重新发送命令。
可能出现的情况如下图所示:
遥控端被遥控端
注意上图情况3和情况4,为了使被遥控端收到重复的命令时,不再去重复的执行命令操作,可以对命令采取一种编号的策略:命令中包含一个命令编号(Command Number)。遥控端在发送了一个命令且成功的收到应答之后,对本地的命令编号加1,下次发送命令时,将使用这个新的命令编号值。被遥控端成功收到命令后,先检查其中的命令编号,如果命令编号与本地的命令编号相同,则直接回应上次发送的应答。如果命令编号与本地的不同,则将本地的命令编号赋值为接收的命令编号,并执行命令操作和回应应答。
3.4 通讯加密
为了防止他人能轻易自造出兼容通讯协议的遥控装置并进行非法的恶意遥控,有必要对建立连接后的通讯过程采取一定的加密措施。
4. 性能评估
这里先假设使用了TI公司的无线收发器件CC1100,根据CC1100的数据手册和上述提出的理论,做一个基本的性能评估。以下是CC1100的一些重要特性:
使用CC1100的优势:支持RSSI和Carrier Sense;较快的收发模式切换;FIFO缓冲;硬件封包;这些都有利于CSMA/CA的实现。较短的PLL稳定时间,有利于跳频功能的实现。
假设基本系统设定为:
调制:2FSK
频率: 433MHz
码率:38.4kbps
假设命令数据包和应答数据包的长度都为20个字节(CC1100硬件封包时可能要占用12个字节)。
如果将38.4kbps的码率当成4Kbyte的字节速率来进行计算。发送一个数据包时,大概占用信道的时间为: 20/4000 = 5ms
如果所有信道内不存在与其他系统竞争和其他干扰情况,顺利的完成一个命令和应答的全过程略大于10ms。那么一秒钟内,遥控端发送命令最多可以达到上百次。如果使用16个信道,在搜索目标时,遥控端在160ms内就可以搜索到目标。
如果信道内存在其他同类系统,其中有两个系统进入发送就绪状态(正在等待信道可用后,随机避让一段时间后启动发送),假设最大避让时间设为10ms,这时冲突发生的概率为:
10ms/(9.6us+D) (其中D为一些其它延时,例如:CPU通过SPI总线写寄存器的所用时间)
此时,在不存在由冲突和干扰导致重发的情况下,完成一个命令和应答的过程将在10ms(发送数据时间*2)~30ms(发送数据时间*2+最大避让时间*2)。如果遥控端把命令超时设置为20ms(发送数据时间:5ms+最大退避时
间:10ms+其他延时时间:5ms)。重发命令的周期为25ms~35ms。
吉林电子信息职业技术学院 毕业论文 题目:简易无线电遥控系统 专业: 学生姓名: 指导老师:
摘要 本系统主要由单片机进行控制,发射部分通过单片机对信号进行编码输出,与晶体振荡电路产生的载波信号,共同作用到ASK调制器经谐振功率放大器,低通滤波器发射出去。接收部分,天线接收到信号经小信号放大器、解调器、解码器,把信号送到被控端,从而控制灯泡的亮度及LED的亮灭。 关键词:AT89C52单片机晶体振荡电路 ASK Abstract This system mainly by the single-chip microcomputer control, partly through the monolithic integrated circuit to launch code, and the output signal of crystal oscillator circuit carrier signal, produced by the joint action of ASK modulator resonant power amplifier, low-pass filter launch out. Receiving part, the antenna to signal the small signal amplifiers, modem and decoder, accused the signals to the bulb, which control the bright brightness and LED them. Key words:AT89C52 single chip computer crystal oscillator circuit ASK
“发明杯”大学生创新大赛作品题目: 无线遥控玩具小车设计与制作
目录 摘要 (1) 引言 (3) 1 方案设计与论证 (4) 1.1 直流调速系统 (4) 1.2 防碰撞系统 (5) 1.3 显示系统 (5) 2 硬件设计 (5) 2.1 小车系统框图 (5) 2.2 单片机最小系统设计 (6) 2.3 电机驱动电路设计 (7) 2.4 遥控发射接收电路设计 (9) 2.4.1 无线发送电路 (10) 2.4.2 无线接收电路 (11) 2.5 检测系统设计 (11) 2.5.1 速度检测设计 (11) 2.5.2 防跌落系统设计 (12) 2.5.3 防碰撞系统设计 (13) 2.6 显示电路设计 (13) 2.7 单片机I/O口的分配 (14) 2.8 电源设计 (14) 2.9 小车车体设计 (14) 3 软件设计 (15) 3.1 主程序设计 (15) 3.2 PWM子程序设计 (17) 3.3 遥控子程序 (18) 3.4 防跌落、碰撞子程序 (20) 3.5 显示子程序 (21) 4 结果分析及结论 (22) 5 谢辞 (23)
6 参考文献 (23) 附件1 程序清单 (24) 附件2 硬件电路图 (33) 附件3 电路PCB图 (34)
无线遥控玩具小车设计与制作 摘要:80C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评,该课题的基本思想是设计一台能够遥控行走并自动回退防止跌落的机器小车。遥控接收端以 80C51 单片机为控制核心,其中数据的发射和接收部分通过无线通讯模块完成。可通过发射端来控制小车的直流电机实现无极调速, 遥控小车进行转向, 并能在液晶上显示出小车的实时速度值。小车还能自动检测落差较大的落差,遇到楼梯等低处会自动回避,以防止小车由高处摔落。 关键词:80C51单片机、PWM调速、遥控小车
“发明杯”大学生创新大赛作品 题目: 无线遥控玩具小车设计与制作 目录 摘要 (1) 引言 (3) 1 方案设计与论证 (4) 1.1 直流调速系统 (4) 1.2 防碰撞系统 (5) 1.3 显示系统 (5) 2 硬件设计 (5) 2.1 小车系统框图 (5) 2.2 单片机最小系统设计 (6) 2.3 电机驱动电路设计 (7) 2.4 遥控发射接收电路设计 (9) 2.4.1 无线发送电路 (10) 2.4.2 无线接收电路 (11) 2.5 检测系统设计 (11) 2.5.1 速度检测设计 (11) 2.5.2 防跌落系统设计 (12) 2.5.3 防碰撞系统设计 (13) 2.6 显示电路设计 (13) 2.7 单片机I/O口的分配 (14) 2.8 电源设计 (14) 2.9 小车车体设计 (14) 3 软件设计 (15) 3.1 主程序设计 (15) 3.2 PWM子程序设计 (17) 3.3 遥控子程序 (18) 3.4 防跌落、碰撞子程序 (20) 3.5 显示子程序 (21)
4 结果分析及结论 (22) 5 谢辞 (23) 6 参考文献 (23) 附件1 程序清单 (24) 附件2 硬件电路图 (33) 附件3 电路PCB图 (34) 无线遥控玩具小车设计与制作 摘要:80C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评,该课题的基本思想是设计一台能够遥控行走并自动回退防止跌落的机器小车。遥控接收端以 80C51 单片机为控制核心,其中数据的发射和接收部分通过无线通讯模块完成。可通过发射端来控制小车的直流电机实现无极调速, 遥控小车进行转向, 并能在液晶上显示出小车的实时 速度值。小车还能自动检测落差较大的落差,遇到楼梯等低处会自动回避,以防止小车由高 处摔落。 关键词:80C51单片机、PWM调速、遥控小车 引言 在我国,单片机已不是一个陌生的名词,它的出现是近代计算机技术的里程碑事件,因为单片机的诞生标志着计算机正式形成了通用计算机系统和嵌入式计算机系统两大分支。在单片机诞生之前,为了满足工控对象的嵌入式应用要求,只能将计算机进行机械加固、电气加固后嵌入到对象体系中构成自动控制。但由于体积过大,无法嵌入到大多数对象体系,如家电、玩具、仪器仪表等。单片机则应嵌入式应运而生。单片机的微小体积和极低的成本,可广泛应用到如玩具、家电、仪器仪表、汽车电子系统、工业控制单元、办工自动化系统、金融电子系统、个人信息终端及通信产品中,成为现代化电子系统中最重要的智能化工具。 本系统以80C51单片机为核心器件,由一块液晶显示小车的运动数据,采用L298N来驱动控制电机的正反转,利用无线遥控装置对小车进行遥控,实现具有前进、后退、左移和右移四种运动方式。利用光电一体化红外线传感器,检测落差较大的地方,实现自己判定,并自己避免落到落差较大的地方。利用微动开关,实现小车碰撞到物体后能自动回避,从而达到遥控智能控制的目的。 基于单片机控制的设计思想,选用廉价的遥控编码解码集成电路(PT2262/PT2272)采用LM298N芯片驱动直流电机,通过PWM实现调速,在小车的外围安置红外传感器。实现小车的无级调速控制 ,小车调试性能稳定。这种遥控方案能实现对电动小车的运动状态进行实时控
. 无线遥控开关电路图及原理 随着社会进步,无线遥控开关被大量的使用,无线遥控开关是采用高科技的射频识别技术设计制作,用无线遥控开关设备控制各类灯饰、家电、门、窗帘等家居用品,是一种新型智能化开关,可对室内灯具、家电等进行无线控制,操作简单方便,性能稳定可靠,受到广大消费者喜爱和追捧,下面就是小编对无线遥控开关原理的具体介绍。 > 随着社会不断发展,科技技术也在不断提升,现在无线遥控开关被大量的使用于我们日常生活中各个角落,例如:家庭、酒店、商场、医院、仓库、办公室等场所用于灯饰照明控制及其它用途电器控制,相信大家对于无线遥控开关并不陌生,但大多数人对于无线遥控开关工作原理都不是很了解,下面小编就对无限遥控开关进行具体介绍,希望对大家有所借鉴作用。 在了解无线遥控开关原理之前,我们先来了解一下无线遥控开关功能,无线遥控开关在设计制作上采用射频识别技术,无方向性,与其它同型号产品间不会造成任何影响和干扰,具有高保密性、性能稳定、功耗低、存储量大、使用方便,可以让灯具同时或个别进行开光,开关和遥控器不必配套购买,用户可自由选配,误码率低,抗干扰能力强。 无线遥控开关安装异常简单方便,不需要接零线,也不需要对灯饰电器进行任何改动,可直接替换原有开关,电网停电后再来电,开关会自动处于关闭状态,避免浪费不必要的电能,可以集中控制全家所有的智能遥控开关。在款式设计上也是多种多样,可供选择面非常广泛,可以将无线遥控开关与传统机械开关进行结合使用,方便简单。 无线遥控开关-原理 无线遥控开关是由发射器和接收器两者组合而成,发射器将控制者的控制按键经过编码,调制到射频信号上进行发射出无线信号,也可以说成是一个编码器。而接收器是将接收到的无线信号进行编码信号再解码,得到与控制按键相对应的信号,然后去控制相应的电路工作了,也被称为解码器。随着科技进步无线遥控开关在工业控制和无线智能家居领域都得到了广泛使用。 无线遥控开关-分类 由于科技进步无线遥控开关种类和功能繁多,按传输控制指令信号的载体分可以分为为:无线电遥控、超声波遥控、红外线遥控,按信号的编码方式不同可以分为:频率编码和脉冲编码,按传输通道数可以分为:多通道遥控和单通道,按同一时间能够传输的指令数目不同可以分为:单路和多路遥控,按指令信号对被控目标的控制技术可以分为:开关型比例型遥控。 无线遥控开关-组成 日常比较常用的无线遥控开关由发射和接收两个部分组成,其无线遥控开关的原理也按照发射和接受来分析。发射部分即遥控器与发射模块,遥控器是作为一个整机来独立使用,对外引出有接线桩头,遥控模块被当作一个元件来使用,接收部分即超外差与超再生接收方式,超再生解调电路它实际上是工作在间歇振荡状态下的再生检波电路。 ;.
四路无线遥控开关的设计方案 摘要:鉴于市场上很多遥控产品质量参差不齐、性能不好,我们设计了性能稳定、价格便宜的无线遥控器。该遥控器发射部分采用315MHz无线数据发射模块和编码集成PT2262组成,接收部分采用超再生式接收模块、PT2272和D触发器4013构成的双稳态电路组成,本设计也解决了PT2272-M4改为PT2272-L4时实现了4路输出就有自锁状态变为非锁定状态。本无线遥控距离可达200m.适用于控制电动门的开关、工业用电动机的开停、正反转等。 0引言 目前市场上有很多无线遥控产品出售,质量参差不齐,有些还使用LC振荡器,频率漂移严重,性能不好。本文介绍一种性能稳定、价格便宜的无线遥控组件。该模块工作频率为315MHz,采用声表谐振器SAW稳频,器频率稳定度极高,当环境温度在一25℃-+85℃之间变化时,频飘仅为3ppm/度。它与编解码集成PT2622/PT2722配套使用时,可以实现遥控、遥测、数据采集、 生物信号采集等功能。 1 PT2262/2272 编码芯片PT2262/2272是台湾普城公司生产的CMOS工艺制造的低功耗低价位通用编码/解码电路,是一对带地址、数据编码功能的无线遥控发射/接收芯片。 发射芯片PT2262将载波振荡器、编码器和发射单元集成于一身,使发射电路变得非常简洁。 它工作电压范围宽(-15V-2.6V),其中A0一A1l为地址管脚,用于进行地址编码,可置为“0”,“1”或“f”(悬空)。DO-D5为数据输入端,有一个为“1”即有编码发出,内部下拉。TE为编码启动端,低电平有效。OSCl、OSC2分别为振荡电阻的输入和输出端,外接电阻决定振荡频率。设定的地址码和数据码从17脚串行输出,平时为低电平,可以直接调制发射模块发射信号。 PT2272通常有L4、L6和M4等后缀输出形式。L4、L6是4路和6路自锁存输出,M4则是四路非锁定输出。而锁存功能是指,当发射信号消失时,PT2272的数据输出端仍保持原来的状态,直到下次接收到新的信号输入。PT2272的非锁存功能是指当发射信号消失时,PT2272的对应数据输出位即变为低电平即数据脚输出的电平是瞬时的,而且和发射端是否发射相对应, 可用以类似点动的控制。 2四路遥控器的工作原理 2.1发射部分 发射部分电路原理图如图1中(a)所示。
毕业设计方案 课题名称:《基于51单片机的WIFI 遥控小车设计》
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
1前言 1.1无线遥控技术现状 无线遥控,即是在控制端把控制指令以某种编码方式形成易于传输的信号,通过无线传输,在受控端经解码等处理形成相应的控制操作。无线控制方式多种多样,可以根据不同的应用需要采用适宜的方式。各种遥控方式的不同,主要在于信息的编码处理方式和信息的传输方式。所传信息的形式以及信息量的大小决定采用何种信息编码和处理方式,而信息传送的距离决定采用何种传输方式。 在编码方式上,目前在简单信息的遥控中常采用的是PCM方式和DTMF方式。这两种方式均具有实现简单、可靠性高的优点。对于复杂以及大量信息的遥控,可以采用相应的信号处理方式,经过适当的信源信道编码以及数字调制等处理来生成易于传输的信号。对于这些编码处理方式,可以根据系统功能需要进行灵活选择。 在传输方式上,对于近距离遥控,可以采用基带传输。对于远距离遥控,需要选择适当的调制方式,进行频带传输。目前常用的调制方式有幅度调制,频率调制和相位调制三种。对于不同形式的基带信号,又可以分为模拟调制和数字调制。对于各种调制方式的选择,可以根据基带信号的形式,传输的带宽限制等因素决定。 对于无线遥控技术,当前基本上通过以下几种方式实现:红外线遥控方式,无线电遥控方式,超声波遥控方式和声音遥控方式。红外技术出现比较早,成本低,价格也具有优势。红外遥控具有以下优点:控制内容多,抗干扰能力比较强,不会发生任何误动作;响应速度快,不会对其他电器产生干扰从而影响用户使用;体积小,成本低,功耗小,与其他方式比可以降低功耗90%。但是他的缺点也很明显,在使用中需要保证遥控发射器和遥控接收设备处与一定的角度范围,中间不能有任何物品,否则就会阻挡红外线的传输,因为红外线不能穿越砖瓦水泥砌筑的墙体,这在日常使用中经常会造成不便,毕竟用户不希望只能在一定的角度范围内才能对对象进行操作,之外红外线方式也容易受到外界干扰。超声波遥控方式中的超声传感器频带窄,能携带的信息量少,易于受干扰而引起误动作,同时该种方式作用距离短,通用性强可以互换因而不适合在灯具遥控中运用。声音遥控方式通用性强,作用距离短,声音携带的信息量少,易受干扰而引起误动,它适合于像声控电灯开关的场合。无线电作为新一代的信息传送方式,具有绕射和穿透特性,只要在有效工作范围之内,无线设备就可以不受角度,方向和障碍物的限制而自由使用。并且采用特定的编码解码技术可以防止无线电波的互相干扰,抗干扰能力强。
无线电遥控器工作原理介绍 2008-07-09 07:14:21 来源: 作者: 【大中小】评论:0条 无线电遥控器的分类和组成 要了解无线电遥控就必须首先知道什么是无线电遥控,无线电遥控就是利用电磁波在远距离上,按照人们的意志实现对物体对象的无线操纵和控制,这种无线控制的方式就叫做无线电遥控。 无线电遥控遥控技术的诞生,起源于无线电通讯技术,最初的构想是无线电电报技术的建立,真空电子管的发明使得无限电技术的应用和普及很快应用在民用和军用等各个领域。在第一次世界大战时,无线电遥控应用较多的是在军事上,将遥控装置安装在鱼雷,当鱼雷发射后利用遥控鱼雷去攻击敌方的船只和舰艇,使得鱼雷的命中率大大的提高。到了第二次世界大战时,纳粹德国又将无线电遥控系统安装在V——2火箭上,对英国伦敦进行了大规模的轰炸,在那时可以说无线电遥控技术发挥到了极至。后来随着晶体管的发明和集成电路的诞生,无线电遥控技术达到了更加完善的程度,现如今我们所知道导弹、卫星、航天飞机等高科技技术都是利用无线电遥控技术的结晶,它已经不再是军事领域唯一成员,我们的日常生活可以说是已经离不了无线电遥控,如:遥控监视、报警、遥控电视、遥控玩具等等。那么,无线电遥控是怎样划分的呢?又是怎样工作的呢?下面我们就来谈谈这个问题。 从无线电遥控的定义上看,所有能够实现无线遥控的控制系统,都应视为无线电遥控装置,为此我们按其发射和接收波谱频率上分,有音频声控、可见光控、红外线控、射频电磁波控和载频电磁波控等;按发射和接收的传输方式上分,有再生式、超再式、外差式、超外差式、等幅、调幅式和调频式等等;如果按发射和接收的载体性质上分,有单音频式遥控、双单音频式遥控、脉冲数字式遥控等等;如果我们按发射和接收的动作类型上分,有开关式、占空比式、脉宽式、脉位式、复合式、时分比例式和混合比例式等等;如果按发射和接收的通道数量上分,有单通道、双通道、四通道、八通道和十通道以上的多通道等等;如果再按发射和接收频率波长上分,有长波、中波、短波或低频、高频和甚高频等等;从发射和接收的电路组成上看,有分立元件、集成电路、模拟电路、数字电路、混合电路等等。可以说从广义上看无线电遥控技术的种类和方式多种多样,我们不能一一的详尽。为了能使大家对无线电遥控有更加深刻的了解,我们先介绍一下模型用无线电遥控设备和电路的组成。 无线电遥控模型的设备一般都包括以下几个部分遥控发射机、遥控接收机、执行舵机、电子调速器组成。 1.遥控发射机 就是我们所说的遥控器,它是来操控我们的车模或船模的,由于它外部有一个长长的天线,遥控指令都是通过机壳外部的控制开关和按钮,经过内部电路的调制、编码,再通过高频信号放大电路由天线将电磁波发射出去。目前模型常用的遥控发射机有三种类型:一种是盒式按键手持用的小型遥控发射机;一种是便携杆式遥控发射机;另一种是手持枪式遥控发射机。前一种多为开关式模拟电路的遥控系统,为一般普通的玩具遥控车模、船模或航模使
目录 第1章绪论 (4) 1.1 课题背景、目的及意义 (4) 1.1.1课题的背景 (4) 1.1.2课题的目的及意义 (4) 1.2 论文的主要内容 (5) 第2章系统的原理 (6) 2.1 系统总体原理 (6) 2.1.1概述 (6) 2.1.2发射机的技术指标 (6) 2.2 发射电路原理 (7) 2.2.1低频信号振荡器 (7) 2.2.2高频信号振荡器 (7) 2.2.3幅度调制 (8) 2.2.4小信号谐振放大 (10) 2.2.5高频功放 (14) 2.3 接收电路原理 (18) 2.3.1天线 (18) 2.3.2检波 (18) 2.3.3低频功放 (21) 第3章系统的电路设计 (23) 3.1 方案的选择 (23) 3.2 方案比较 (24) 第4章发射电路的设计 (25) 4.1 低频振荡器 (25) 4.1.1555定时器 (25) 4.1.2555定时器构成多谐振荡器 (26) 4.1.3电路设计及仿真 (27)
4.2 高频振荡器 (28) 4.2.1电路分析 (28) 4.2.2振荡频率分析 (29) 4.2.3电路设计与仿真 (30) 4.3 调幅 (31) 4.3.1MC1496 (31) 4.3.2MC1496组成的调幅电路 (32) 4.4 小信号谐振放大 (32) 4.4.1高频小信号放大器的主要技术指标 (33) 4.4.29018三极管简介 (32) 4.4.3小信号谐振放大电路的设计 (34) 4.5 高频功放 (36) 4.5.1甲类功放 (37) 4.5.2丙类功放 (38) 4.5.3高频功放电路分析与设计 (39) 第5 章接收电路设计 (42) 5.1 天线 (42) 5.2 小信号谐振放大 (42) 5.3 检波 (42) 5.3.1检波二极管 (42) 5.3.2检波电路分析与设计 (43) 5.4 低频功放 (45) 第6章系统的组装与调试 (48) 6.1 调试仪器及方法 (48) 6.2 电路组装和调试 (48) 6.3 调试过程中出现的故障、原因及解决方法 (48) 结论 (51) 致谢 (52) 参考文献 (53) 附录1 发射电路原理图 ................................................... 错误!未定义书签。 附录2 接收电路原理图 ................................................... 错误!未定义书签。
何谓[比例式遥控器]: 所谓的比例式遥控装置,就是当操纵者以不同的速度或幅度拨动发射机的操纵杆,遥控系统的接收机接收到信号,相应的控制舵机或变速器做相同速度或幅度的运动的遥控装置。换言之,模型的动作完全与发射机操纵杆的动作成比例,这不同于过去的开关式的遥控装置,受动物会随着操纵者的小幅度操纵而做小幅度的动作,基本上模型通过比例式遥控装置真实的反应操纵者的所想所做。这正是[比例式遥控器]的优点。 遥控器的分类:为了操纵不同类别的遥控模型,遥控器也分为许多种类。通常,以它的频道(Channel)数目作为区分方法。像模型车和模型船,多采用2频道遥控装置控制转向系统和油门(节油阀)系统;用于控制模型飞机和直升飞机的遥控器装置,通常采用2-4频道以上,甚至有的还采用10频道的遥控器。另一种区分方法是以使用的特性,也就是根据特有附加功能进行分类。 此外。根据不同的无线电波频率又可以分为(AM)和(FM),前者着重于简单方便,后者着重于稳定可靠。最顶级的遥控装置则采用技术最先进的(PCM-Pulse Code Modulation)脉冲编码调制或称(数码)方式。用于模型飞机及直升飞机波段频率MHz 71 40.710 73 40.730 75 40.750 77 40.770 79 40.790 81 40.810 83 40.830 85 40.850 17 72.130 18 72.150 19 72.170 20 72.190 21 72.210 50 72.790 51 72.810 52 72.830 53 72.850 54 72.870 用于模型车船艇和帆船波段频率MHz 01 26.975 02 26.995 03 27.025 04 27.045 05 27.075 06 27.095 07 27.125 08 27.145 09 27.175 10 27.195 11 27.225 12 27.245 61 40.610 63 40.630 65 40.650 67 40.670 69 40.690 注意使用频率! 众所周知,遥控装置的发射机与接收机之间是通过无线电波沟通的,为了愉快地享受遥控模型的乐趣,对所用的无线电波实行管制是致为重要的,右表所示是为国际及美国政府规定合法的无线电波使用频率。无论您使用怎样高级的遥控装置,或采用各种各样的发讯方式,使用的频率范围是不能变化的。所以,必须注意在同一场合玩遥控模型的朋友不可同时使用相同的频率的遥控装置,否则便会互相干扰使遥控模型失去控制,甚至产生重大事故!! 无线电遥控器的分类和组成要了解无线电遥控就必须首先知道什么是无线电遥控,无线电遥控就是利用电磁波在远距离上,按照人们的意志实现对物体对象的无线操纵和控制,这种无线控制的方式就叫做无线电遥控。无线电遥控遥控技术的诞生,起源于无线电通讯技术,最初的构想是无线电电报技术的建立,真空电子管的发明使得无限电技术的应用和普及很快应用在民用和军用等各个领域。在第一次世界大战时,无线电遥控应用较多的是在军事上,将遥控装置安装在鱼雷,当鱼雷发射后利用遥控鱼雷去攻击敌方的船只和舰艇,使得鱼雷的命中率大大的提高。到了第二次世界大战时,纳粹德国又将无线电遥控系统安装在V——2火箭上,对英国伦敦进行了大规模的轰炸,在那时可以说无线电遥控技术发挥到了极至。后来随着晶体管的发明和集成电路的诞生,无线电遥控技术达到了更加完善的程度,现如今我们所知道导弹、卫星、航天飞机等高科技技术都是利用无线电遥控技术的结晶,它已经不再是军事领域唯一成员,我们的日常生活可以说是已经离不了无线电遥控,如:遥控监视、报警、遥控电视、遥控玩具等等。那么,无线电遥控是怎样划分的呢?又是怎样工作的呢?下面我们就来谈谈这个问题。从无线电遥控的定义上看,所有能够实现无线遥控的控制系统,都应视为无线电遥控装置,为此我们按其发射和接收波谱频率上分,有音频声控、可见光控、红外线控、射频电磁波控和载频电磁波控等;按发射和接收的传输方式上分,有再生式、超再式、外差式、超外差式、等幅、调幅式和调频式等等;如果按发射和接收的载体性质上分,有单音频式遥控、双单音频式遥控、脉冲数字式遥控等等;如果我们按发射和接收的动作类型上分,有开关式、占空比式、脉宽式、脉位式、复合式、时分比例式和混合比例式等等;如果按发射和接收的通道数量上分,有单通道、双通道、四通道、八通道和十通道以上的多通道等等;如果再按发射和接收频率波长上分,有长波、中波、短波或低频、高频和甚高频等等;从发射
龙源期刊网 https://www.doczj.com/doc/b95540372.html, 智能家居系统的无线控制方案设计 作者:张占军陈诗伟赵煜李未超 来源:《科教导刊·电子版》2015年第01期 摘要本方案设计了利用树莓派卡片电脑为控制服务器,ZigBee作为无线组网工具的无线智能家居控制系统。通过该系统,用户可以通过网络端实时访问并控制树莓派向ZigBee协调器发送控制命令,并由ZigBee路由器接收协调器转发的命令,从而控制终端电器设备。方案为智能门锁设计了用高低电平控制开闭锁;为智能窗帘设计了两个电机正反转控制窗帘的开闭;为智能电灯设计了通过调光模块调节电灯亮度。 关键词树莓派 ZigBee 智能家居 中图分类号:TN873 文献标识码:A 智能家居作为一个新兴产业,正于一个成长发展期,技术的发展更新正是物联网智能家居发展方向。当前,智能家居系统尚未有统一的行业标准,其控制方式也形式多样,但有线连接控制的方式居多,与无线相比,安装工作和使用维护的方便性都要逊一筹。随着近两年Wi-Fi、蓝牙和ZigBee等技术突飞猛进地发展和广泛应用,无线技术和设备已带给人们诸多便 利,悄然改变着人们传统的生活习惯。本方案在现有智能家居技术的背景下,研究无线智能家居的控制。 1 主要开发设备及环境 1.1 系统控制设备 本方案以当前迅速兴起的树莓派(Raspberry Pi)作为系统控制设备。它是一款基于Linux 系统的、只有一张信用卡大小的卡片式计算机,内存为256M、CPU为ARM1176JZF-S,具有多媒体处理能力,具有体积小、价格低廉、功能强大的特点。通过通用端口(GPIO)来控制外连设备,简单的说就是给其26个针脚赋值高低电平,以达到对外部设备的控制。 1.2 无线通信设备 随着物联网的发展,衍生出来的无线连接方式多种多样,红外、蓝牙、Wi-Fi和ZigBee等都已成为开发人员研究方向。与蓝牙等相比,ZigBee在家庭自动化控制中,在功耗、距离和 组网容量、时延短等方面稍有优势,而Wi-Fi则在连接互联网、智能手机和个人电脑方面表现更好,因此本方案设计使用了两种无线通信技术:Wi-Fi和ZigBee。 2 系统设计 2.1 总体设计目标
高级职业技能实训
课程设计报告
课题名称基于 ARM 平台的智能遥控小车 专 班 姓 业
电子信息工程技术
级电子 B1512 班 名
同 组 人 指导教师
2017-11-02
目
录
1.设计题目、要求及分工 .................................................................................... 3 1.1 设计题目 ............................................................................................................ 3 1.2 设计要求 ............................................................................................................ 3 1.3 分工 .................................................................................................................... 3 2.设计方案 .......................................................................................................... 3 3.硬件电路设计 ................................................................................................... 4 3.1 硬件系统整体分析 ............................................................................................. 4 3.2 各模块功能介绍 ................................................................................................. 4
3.2.1 L298N 驱动模块 ................................................................................................ 4 3.2.2 NRF24L01 无线通信模块 ................................................................................ 5 3.2.3 STM32 处理器 .................................................................................................... 6 3.2.4 液晶屏显示模块 ............................................................................................... 6 3.2.5 显示屏与微控制器通信方式 ......................................................................... 6 3.2.6 本章小结 ............................................................................................................ 8
4.软件系统的分析与设计 .................................................................................... 8 5.调试结果记录及分析.......................................................................................10 5.1 作品编译环境 ................................................................................................... 10 5.2 结果记录及分析 ............................................................................................... 11
5.2.1 电阻式触摸屏调试记录 .................................................................................. 11 5.2.2 2.4G 无线通信模块调试记录 ........................................................................ 11 5.2.3 直流电机调试记录 .......................................................................................... 11
参考文献 .............................................................................................................12 附录 1..................................................................................................................13 附录 2..................................................................................................................22
简易无线电遥控系统 ----正式选拔 一、任务 设计并制作无线电遥控发射机和接收机。 1.无线电遥控发射机 二、要求 1.基本要求 (1)工作频率:f o=1~10MHz中任选一种频率。 (2)调制方式:AM、FM或FSK……任选一种。 (3)输出功率:不大于20mW(在标准75Ω假负载上)。 (4)遥控对象:8个,被控设备用LED分别代替,LED发光表示工作。 (5)接收机距离发射机不小于2m。 2.发挥部分 (1)8路设备中的一路为电灯,用指令遥控电灯亮度,亮度分为8级并用数码管显示级数。 (2)在一定发射功率下(不大于20mW),尽量增大接收距离。 (3)增加信道抗干扰措施。 (4)尽量降低电源功耗。 注:不能采用现成的收、发信机整机。 三、设计及其原理 1、设计总思路
根据要求,控制对象是8盏灯,因对频带宽度没有限制,为了提高抗干扰能力,实现方法简单,载波传输采用FSK调制方式。 发射机主振电路型式本设计选择了变容二极管直接调频的西勒电路,即可获得较大的频偏,又可保证一定的频率稳定度。 功率放大器一般可由推动级、中间级和输出级组成,具体级数应由所要求的总功率增益而定。试题要求输出功率不大于20mW,假设天线特性阻抗为75Ω,则在匹配良好条件下天线上电压峰——峰值要小于3.5v。一般西勒振荡器输出电压峰——峰值为1v是可实现的,故用一级功率放大应能满足要求。考虑到前后级影响的问题,在振荡器与功放间加入了一级射随器,起隔离和激励的作用。鉴于输出功率低,兼顾效率,功放管工作状态选为甲乙类。 接收机高频放大器,为保证接收机具有较高的灵敏度,选用低噪声高频晶体管2SC763。为获得一定的电压增益,采用共射极谐振放大电路。 接收机解调器,通过查阅资料,选择了摩托罗拉的单片集成窄带FM解调芯片MC3361构成解调电路。MC3361的特点为低功耗、低电压和高灵敏度,在窄带语音和数据通信中有良好的镜频抑制能力。 控制部分,我们先用74HC148进行优先编码,然后为了便于码元的传输,需要对码元件进行再编码(一是进行并/串转换,二是加入一定冗余信息提高可靠性)。经查阅资料,VD5026和VD5027(本来要用MC145026和MC145027但是没买到)是专门设计用于遥控电路中的编/解码器。故用VD5026和VD5027来控制信号的再编码与解码。 2、发射机 发射机又分两个部分,发射部分和编码部分 (1)发射部分
WFS-501型1路无线遥控开关制作 文章作者:沃福斯电子来源:本站原 创 浏览次数:11195 字体:大中 小 阅读权限:游客身份花费会员币: 添加时间: 2009-5-16 10:51:03 提交会员: admin 在电子制作实训网上以前介绍的一款1路遥控开关中,用到了双向可控硅作为控制元件,由于97A6双向可控硅工作电流较小,且对负载的要求较高,只能对小功率的阻性负载进行控制,因此在实际应用中有一定的局限性,在这里,我们介绍一款利用继电器作为控制元件的继电器型1路遥控开关的制作,由于选用的继电器触点容量达到10A,且不挑负载,因此具有更广泛的应用。 1、电路工作原理 电路原理图见图1。电路主要由供电部分、无线接收部分、数据解码部分和开关控制部分组成。220V交流市电接在进线端子上,经C1、R2、VD1、VD2、VD 3、VD4组成的降压整流电路后,经R1限流后,在CW1上形成24V左右的直流电压,为电路提供工作电源。另一路电源经R4限流降压后,在CW3两端形成稳定的5V工作电压,作为无接接收模块和解码电路的工作电源。 平时,IC1的12脚输出低电平,VT1关断,继电器断开。当接收模块SH9902收到遥控器发射的无线电编码信号后,就会在其输出端输出一串控制数据码,这个编码信息经专用解码集成电路IC1解码后,在数据输出端输出相应的控制数据,本文介绍的数据信息为有效时D1输出为高电平,这个高电平经R3输入到VT1 的基极,使其导通,从而使继电器吸合,其控制的电灯被点亮;当无线接收部分收到的数据信息为D1数据为0时,VT1截止,继电器断开,灯泡回路关断,从而达到遥控控制电灯的目的。
****************大学 班级:****** 作者:****** 指导老师:****
1引言 1.1编写目的 本概要设计说明书是针对电子设计的课程要求而编写。目的是对该项目进行总体设计,在明确系统需求的基础上划分系统的功能模块,进行系统开发的分工,明确各模块的接口,为进行后面的详细设计和实现做准备。满足无线遥控爱好者对智能小车的设计要求,想通过这份概要设计给爱好者一个好的设计思路,设计方法进行参考。 本概要设计说明书的预期读者为本项目小组成员以及无线遥控爱好者。 1.2背景 a.实践题目的名称:无线遥控智能小车 b.项目的任务提出者:***,***,*** c.项目的开发者:***,***,*** d.面向用户:所有无线遥控爱好者,对智能小车感兴趣,想借此提高动手能 力的用户。 鉴于电子设计课程要求,需要一份设计实品,加之小组成员对智能小车有着独特的爱好,所以这次设计选择了遥控智能小车作为电子设计的题目。 2总体设计 2.1需求规定 ●所设计智能小车功能: 主要功能:无线遥控,避障; 附加功能:超声波测距、速度调节、液晶显示、音乐、流水灯和散热系统。 ★通过无线串口对小车进行无线遥控,可以在遥控,避障这两个主要功能之间自由切换。 ★遥控时,通过遥控器上的按钮可以方便灵活地控制小车前进,后退,左转和右转等。 ★避障时,利用红外传感器探测障碍物,从而达到避障的目的。 ●小车安装了超声波传感器,可以进行距离测量,如果距离过近,蜂鸣器发出警报,并将距离等数据实时传到液晶屏上显示。 ★通过按钮同时控制一些其他功能,如音乐,风扇和流水灯等。
2.2运行环境 最好是室内平地 2.3基本设计概念和处理流程 整体框图: 2.4所需器件 ★小车模型(三轮,带电机) ★ATMAGE16单片机最小系统(3个,小车上两个一个负责接受无线,控制电机,另外一个则是负责其他功能,最后一个遥控器上的) ★直流电机驱动模块,采用两个LM298驱动模块分别控制两个电机 ★传感器模块,采用红外传感器2个,超声波传感器两个 ★无线串口模块 ★电源模块(5v,12v) ★按键模块,用于无线遥控小车 ★LCD1602液晶一块
无线遥控设计 一. 总体概述:本系统有六大部分组成分PS/2电脑键盘控 制部分.双单片机控制部分.无线数字收发部分.摄相头采集部分. 高频放大发射部分.电视观察接收信号图像部分。 二. 题目分析及方案论证:本题中要求发射大于10米,且 多通道。所以可采用高频无线数字收发模块。如NRF 系列数字收发模块。可选用单片机给数字模块进行控制和配置寄存器,及用SPI给数字模块发送数据。 1 .NRF系列数字收发模块选择方案论证 1.1 NRF401可以达到题目要求所设计的无线数传模块由单片射频收发芯片nRF401.AT89C52微控制器和MAX3316接口芯片构成,工作在433.92/434.33MHz频段; nRF401是北欧集成电路公司(NORDIC)的产品,是一个为433MHz ISM频段设计的真正单片UHF无线收发芯片,满足欧洲电信工业标准(ETSI)EN300200-1 V 1.2.1。它采用FSK调制解调技术,最高工作速率可以达到 20K,发射功率可以调整,最大发射功率是+10dBm。nRF401的天线接口设计为差分天线,以便于使用低成本的PCB天线。它要求非 常少的外围元件(约10个),无需声表滤波器.变容管等昂贵的 元件,只需要便宜且易于获得的4MHz晶体,收发天线合一。无需进行初始化和配置,不需要对数据进行曼彻斯特编码,有两个工 作频宽(433.92/434.33MHz),工作电压范围可以从
2.7-5V,还具有待机模式,可以更省电和高效。n RF401无线收发芯片的结构框图如图1所示:内部结构可分为发射电路.接收电路.模式和低功耗控制逻辑电路及串行接口几部分。发射电路包含有:射频功率放大器.锁相环(PLL),压控振荡器(VCO),频率合成器等电路。基准振荡器采用外接晶体振荡器,产生电路所需的基准频率。 其主要特性如下: ●工作频率为国际通用的数传频段●FSK 调制,抗干扰能力强,特别适合工业控制场合;●采用PLL频率合成技术,频率稳定性极好;●灵敏度高,达到-105dBm (nRF401);●功耗小,接收状态250 A,待机状态仅为8 A (nRF401);●最大发射功率达 +10dBm ;●低工作电压( 2.7V),可满足低功耗设备的要求;●具有多个频道,可方便地切换工作频率;●工作速率最高可达20Kbit/s(RF401); ●仅外接一个晶体和几个阻容.电感元件,基本无需调试;●因采用了低发射功率.高接收灵敏度的设计,使用无需申请许可证,开阔地的使用距离最远可达1000米 (与具体使用环境及元件参数有关)。T X与RX之间的切换当从RX切换到TX模式时,数据输入脚(DIN)必须保持为高至少1ms才能收发数据。当从TX切换到RX 时,数据输出脚(DOUT)要至少3ms以后有数据输出。S tandby 与RX之间的切换从待机模式到接收模式,当PWR_UP输入设成1时,经过tSR时间后,DOUT脚输出数据才有效。对 nRF401来说,tST最长的时间是3ms。