
证券代码:002472 证券简称:双环传动公告编号:2020-065
浙江双环传动机械股份有限公司
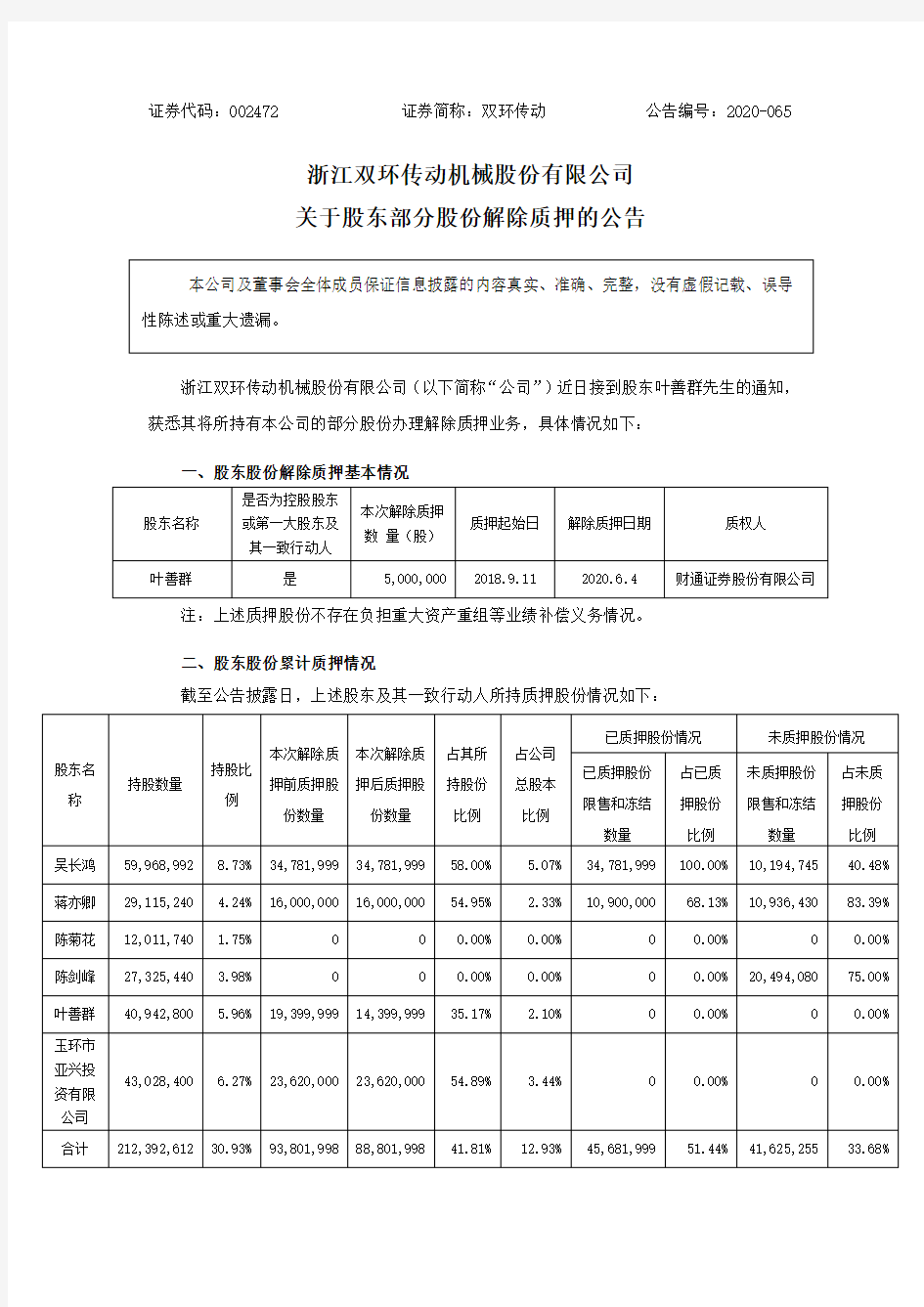
关于股东部分股份解除质押的公告
浙江双环传动机械股份有限公司(以下简称“公司”)近日接到股东叶善群先生的通知,获悉其将所持有本公司的部分股份办理解除质押业务,具体情况如下:
一、股东股份解除质押基本情况
注:上述质押股份不存在负担重大资产重组等业绩补偿义务情况。
二、股东股份累计质押情况
截至公告披露日,上述股东及其一致行动人所持质押股份情况如下:
注:上表“已质押股份限售和冻结数量”、“未质押股份限售和冻结数量”中限售股均为高管锁定股。
特此公告。
浙江双环传动机械股份有限公司董事会 2020年6月5日
课程设计 题目直流双环系统(二)的设计及仿真 分析(四) 学院自动化学院 专业自动化专业 班级 姓名 指导教师 2013 年12 月30 日
课程设计任务书 学生姓名: 专业班级: 指导教师: 工作单位: 自动化学院 题 目: 直流双环系统(二)的设计及仿真分析(四) 初始条件: 有一转速、电流双闭环控制的H 形双极式PWM 直流调速系统,电动机参数为: 200,48, 3.7,200/min N N N N P W U V I A n r ====,电枢电阻 6.5a R =Ω,电枢回路总电阻8R =Ω,允 许电流过载倍数2λ=,电势系数0.12min/e C V r =?,电磁时间常数0.015l T s =,机电时间常数0.2m T s =,电流反馈滤波时间常数0.001oi T s =,转速反馈滤波时间常数 0.005on T s =,调节器输入输出电压**10nm im cm U U U V ===,调节器输入电阻040R k =Ω, 电力晶体管的开关频率1f kHz =,PWM 环节的放大倍数 4.8s K =。 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 试对该系统进行动态参数设计。设计指标:稳态无静差,电流超调量5%i σ≤;空载起动到额定转速时的转速超调量20%n σ≤,过渡过程时间0.1s t s ≤。画出系统结构框图并计算: (1) 电流反馈系数β和转速反馈系数α; (2) 设计电流调节器,计算电阻和电容的数值(取040R k =Ω); (3) 设计转速调节器,计算电阻和电容的数值(取040R k =Ω); (4) 让电机带载(2dL I n ∝,风机泵类负载)启动到额定转速,观察并录下电机的转速、电流等的波形,并进行分析。
2013年度玉环县“三龙”企业等先进名单一、巨龙企业(20家) 浙江苏泊尔股份有限公司 浙江双环传动机械股份有限公司 中捷控股集团有限公司 浙江琦星电子有限公司 浙江正裕工业股份有限公司 浙江双友机电集团股份有限公司 永和流体智控股份有限公司 浙江骆氏减震件股份有限公司 台州华儒阀门有限公司 浙江苏强格液压股份有限公司 隆中控股集团有限公司 浙江艾迪西流体控制股份有限公司 浙江利中实业有限公司 浙江沪龙电机有限公司 浙江环方汽车电器有限公司 浙江和日摇臂有限公司 玉环县锐利机械有限公司 浙江苏尔达洁具有限公司 浙江九隆机械有限公司 浙江汇丰汽配制造有限公司 二、玉龙企业(100家)
浙江华龙巨水科技股份有限公司 华润雪花啤酒(台州)有限公司 浙江康意洁具有限公司 菲时特集团股份有限公司 玉环普天单向器有限公司 浙江万得凯铜业有限公司 浙江海德曼机床制造有限公司 玉环凯凌集团有限公司 浙江清源水暖洁具有限公司 台州迈得医疗工业设备股份有限公司台州易宏实业有限公司 浙江苏泊尔橡塑制品有限公司 玉环津力汽车配件有限公司 浙江华邦机械有限公司 玉环贝立德能源科技有限公司 申达控股集团股份有限公司 浙江世进水控股份有限公司 三木控股集团有限公司 台州康龙医药包装有限公司 浙江中兴减震器制造有限公司 玉环县万全机械制造有限公司 浙江耐士伦机械有限公司
浙江雷安电气有限公司 浙江诺贝家具有限公司 浙江普力源铜业有限公司 台州征帆铜业股份有限公司 台州方科汽车部件有限公司 净化控股集团有限公司 浙江金辉机械有限公司 浙江博民机电股份有限公司 台州奥星纳机械有限公司 浙江天源家具有限公司 浙江玉升医疗器械股份有限公司台州永安转向器有限公司 浙江益新机械制造有限公司 浙江翔帝阀门有限公司 浙江宝路鞋业有限公司 台州和日汽车零部件有限公司 浙江华达机械有限公司 玉环赛林水暖器材有限公司 玉环县祥利机动车配件有限公司浙江宇太汽车零部件制造有限公司台州丰华铜业有限公司 浙江德利众机械制造有限公司
基于准PR双环控制的单相逆变器的设计与研究 发表时间:2019-05-13T16:06:17.847Z 来源:《知识-力量》2019年8月26期作者:王思正 [导读] 本文对单相全桥SPWM逆变器进行了系统的建模与分析,结合运动控制系统的设计思路,引入了电压外环PR控制、电流内环PI控制的双闭环的控制策略,利用极点配置法设计出了所引入的控制器的参数。在MATLAB中对整个系统进行simulink仿真。 (中南大学,湖南长沙 410000) 摘要:本文对单相全桥SPWM逆变器进行了系统的建模与分析,结合运动控制系统的设计思路,引入了电压外环PR控制、电流内环PI控制的双闭环的控制策略,利用极点配置法设计出了所引入的控制器的参数。在MATLAB中对整个系统进行simulink仿真。仿真结果证明,基于准PR双环控制的单相逆变器,即使在有负载扰动的情况下,也能够在稳定的基础上具有良好的动态性能与稳态精度。 关键词:电力电子技术;逆变器;PR控制;极点配置;双闭环 引言 随着数字电路控制技术的不断发展,其开关频率可以设置的很大,使得SPWM逆变器的输出电压的谐波分量高频化,进而我们可以使用体积很小的滤波器就可以获得失真度很小的正弦波。但受到死区效应、A/D转换和非线性负载等因素的影响,会使得逆变系统的输出电压发生畸变。事实上,无论是电网,还是在我们的生活中,大部分的负载都是非线性负载,所以我们必须引入适当的控制器,来减弱或者消除这种影响。 针对传统电压电流双闭环控制方案存在的问题,结合所学知识,考虑到自动控制理论的基本原理——内模原理,本文外环采用准PR控制,提高系统的稳态精度,内环采用经典的PI控制,用以改善系统的动态性能。 1逆变器的数学模型分析 单相全桥逆变器在中大功率场合得到广泛应用因此本文主要对单相全桥逆变器进行研究。常见的单相全桥逆变器的拓扑,主要有直流侧、逆变桥及输出L-C滤波器组成。 1.1逆变桥的建模 1.2 LC滤波结构建模 为便于对逆变器的结构进行分析仅考虑负载端LC滤波低通部分,由滤波器的结构可以得到如下动态空间表达式: 。对于逆变器的LC滤波部分,将输出电压Uin作为输入量,将电容两端的电压Uo作为输出量,电感电流iL作为电流内反馈信号,输出电压Uo作为电压外反馈信号,建立单相逆变器输出滤波部分的电路等效框图如图1所示: 图1:单相逆变器LC滤波结构框图 2逆变器的双闭环控制 2.1逆变器的双闭环控制分析 LC滤波系统的闭环传函:。可知,r很小,系统的阻尼比很小,极易产生震荡,因此必须采用闭环控制提高系统的阻尼比,改善系统的的性能。通常采用双闭环控制,双闭环控制能够在保持系统稳定的基础上极大地改善系统的动态性能和稳态精度。 传统的双闭环控制,内环调节器采用比例控制,外环调节器采用PI控制,这样虽然也能起到改善系统性能的目的,但PI控制并不能无差的跟踪正弦信号,因此本文电压外环采用准PR(比例谐振)控制,它可以无差的跟踪正弦信号,进一步提升系统的稳态精度。内环采用
双环传动2019年财务分析综合报告双环传动2019年财务分析综合报告 一、实现利润分析 2019年实现利润为9,609.67万元,与2018年的22,198.78万元相比有较大幅度下降,下降56.71%。实现利润主要来自于内部经营业务,企业盈利基础比较可靠。在市场份额扩大的情况下,营业利润却出现了较大幅度的下降,企业未能在销售规模扩大的同时提高利润水平,应注意增收减利所隐藏的经营风险。 二、成本费用分析 2019年营业成本为265,475.26万元,与2018年的251,075.76万元相比有所增长,增长5.74%。2019年销售费用为11,337.14万元,与2018年的10,469.47万元相比有较大增长,增长8.29%。2019年在销售费用有较大幅度增长的同时营业收入也有所增长,企业销售活动取得了一些成效,但是销售投入增长明显快于营业收入增长。2019年管理费用为11,955.63万元,与2018年的15,333.15万元相比有较大幅度下降,下降22.03%。2019年管理费用占营业收入的比例为3.69%,与2018年的4.87%相比有所降低,降低1.17个百分点。但并没有带来经济效益的明显提高,要注意控制管理费用的必要性。2019年财务费用为12,816.58万元,与2018年的9,982.93万元相比有较大增长,增长28.38%。 三、资产结构分析 2019年企业资金不合理占用数额较大,企业经营活动资金紧张,资产结构不太合理。从流动资产与收入变化情况来看,流动资产下降,收入增长,资产的盈利能力明显提高,与2018年相比,资产结构趋于改善。 四、偿债能力分析 从支付能力来看,双环传动2019年的经营活动的正常开展,在一定程度上还要依赖于短期债务融资活动的支持。从企业当期资本结构、借款利率和盈利水平三者的关系来看,企业增加负债不会增加企业的盈利水平, 内部资料,妥善保管第1 页共3 页
证券代码:002472 证券简称:双环传动公告编号:2020-063 浙江双环传动机械股份有限公司 关于公司为子公司提供担保的进展公告 一、担保情况概述 浙江双环传动机械股份有限公司(以下简称“公司”)于2020年4月26日召开的第五届董事会第十五次会议和2020年5月19日召开的2019年年度股东大会,审议通过了《关于2020年度公司及子公司提供融资担保的议案》。2020年度,根据整体生产经营计划和资金需求情况,公司、下属全资及控股子公司拟向金融机构、融资租赁公司进行融资,为确保生产经营持续、健康发展,公司拟为部分全资及控股子公司提供不超过220,000万元额度的金融机构、融资租赁公司融资担保;同时,部分全资子公司拟为公司提供不超过30,000万元额度的金融机构融资担保,实际担保金额以最终签订的担保合同为准。上述担保额度的有效期自2019年年度股东大会审议通过本议案之日起至2020年年度股东大会召开之日止。具体内容详见公司于2020年4月28日、2020年5月20日在指定信息披露媒体《中国证券报》、《上海证券报》、《证券时报》、《证券日报》及巨潮资讯网(https://www.doczj.com/doc/ae3360799.html,)披露的相关公告(公告编号:2020-028、2020-033、2020-053)。 二、担保进展情况 1、2020年6月3日,公司与广发银行股份有限公司淮安分行签署《最高额保证合同》,为全资子公司江苏双环齿轮有限公司向广发银行股份有限公司淮安分行申请人民币15,000万元融资授信额度提供连带责任担保,担保的最高债权额为人民币15,000万元。 2、2020年6月3日,公司与中国银行股份有限公司淮安楚州支行签署《最高额保证合同》,为全资子公司江苏双环齿轮有限公司向中国银行股份有限公司淮安楚州支行申请人民币10,000万元融资授信额度提供连带责任担保,担保的最高债权额为人民币10,000万元。 3、2020年6月3日,公司与平安国际融资租赁有限公司签署《保证合同》及相关补充协议,为控股子公司重庆神箭汽车传动件有限责任公司(以下简称“重庆神箭”)与平安国
双环传动2019年财务分析详细报告 一、资产结构分析 1.资产构成基本情况 双环传动2019年资产总额为815,966.85万元,其中流动资产为287,145.63万元,主要分布在存货、应收账款、货币资金等环节,分别占企业流动资产合计的40.52%、28.79%和11.94%。非流动资产为528,821.22万元,主要分布在固定资产和在建工程,分别占企业非流动资产的60.44%、29.96%。 资产构成表 项目名称 2019年2018年2017年 数值百分比(%) 数值百分比(%) 数值百分比(%) 总资产815,966.85 100.00 792,374.57 100.00 748,718.39 100.00 流动资产287,145.63 35.19 315,316.83 39.79 407,292.18 54.40 长期投资13,007.84 1.59 20,706.61 2.61 20,201.07 2.70 固定资产319,605.59 39.17 244,392.98 30.84 182,857.5 24.42 其他196,207.8 24.05 211,958.15 26.75 138,367.64 18.48 2.流动资产构成特点 企业营业环节占用的资金数额较大,约占企业流动资产的40.52%,说
明市场销售情况的变化会对企业资产的质量和价值带来较大影响,要密切关注企业产品的销售前景和增值能力。企业流动资产中被别人占用的、应当收回的资产数额较大,约占企业流动资产的29.45%,应当加强应收款项管理,关注应收款项的质量。 流动资产构成表 项目名称 2019年2018年2017年 数值百分比(%) 数值百分比(%) 数值百分比(%) 流动资产287,145.63 100.00 315,316.83 100.00 407,292.18 100.00 存货116,361.49 40.52 114,602.25 36.35 96,539.16 23.70 应收账款82,655.21 28.79 68,507.99 21.73 59,596.6 14.63 其他应收款1,916.82 0.67 5,960.22 1.89 868.78 0.21 交易性金融资产0 0.00 0 0.00 0 0.00 应收票据1,810.42 0.63 29,314.05 9.30 29,471.36 7.24 货币资金34,274.75 11.94 61,861.31 19.62 184,126.2 45.21 其他50,126.94 17.46 35,071.01 11.12 36,690.08 9.01 3.资产的增减变化 2019年总资产为815,966.85万元,与2018年的792,374.57万元相比有所增长,增长2.98%。
/******************************************************************************* *********** 函数类型:双环PID 适用编程环境:CS+ 参数个数:共15个 分别为三种姿态每种姿态各有5个参数:外环(角度环)的P、I、D 及内环(角速度环)的P、D 函数说明:1、这个双环PID是根据crazepony的串行PID的伪代码改的用于瑞萨的程序本双环PID 外环是角度环有P、I、D三个参数外环PID输出公式为: 外环PIDout = P * 角度差 + I * 角度差积分 + D * 角速度 (其中角度差=期望角度-实时角度;另外由于角度差的微分为角速度所以直接用6050读出的角速度参与计算) 内环是角速度环有P、D两个参数内环PD输出公式为: 内环PDout = P * 角速度差 + D * 角加速度 (其中角速度差=外环PID输出-实时角速度;另外由于角速度差的微分为角加速度所以直接用6050读出的角加速度参与计算) 2、期望角度(Q_Roll,Q_Pitch,Q_Yaw)由主程序mpu6050初始化后得出 3、瑞萨编译器CS+中汉语字符乱码所以所有注释均由拼音给出 ******************************************************************************** *************/ /**** bian liang & chang liang ding yi *********/ /*******chang liang ding yi *********/ double Q_Roll,Q_Pitch,Q_Yaw; //chu shi jiao du (qi wang jiao) /*******bian liang ding yi ********/ double RA_Roll,RA_Pitch,RA_Yaw; //shi shi jiao du //double RA_Roll_old,RA_Pitch_old,RA_Yaw_old; //shang yi ci jiao du zhi double RS_Roll,RS_Pitch,RS_Yaw; //shi shi jiao su du //double RS_Roll_old,RS_Pitch_old,RS_Yaw_old; //shang yi ci jiao su du zhi double RJ_Roll,RJ_Pitch,RJ_Yaw; //shi shi jiao jia su du /*****WAI HUAN****/ //wai huan bian liang double W_Roll_p,W_Pitch_p,W_Yaw_p; //wai huan bi li bian liang double W_Roll_i,W_Pitch_i,W_Yaw_i; //wai huan ji fen bian liang double W_Roll_d,W_Pitch_d,W_Yaw_d; //wai huan wei fen bian liang //wai huan PID can shu double P_W_Roll,P_W_Pitch,P_W_Yaw; //wai huan P can shu
基于自抗扰控制的双环伺服系统详解 近年来,由于永磁同步电机(permanentmagnetsynchronousmotor,PMSM)高转矩电流比、效率高等优点,在伺服系统中得到广泛应用。随着人们对快速定位、调试简单等需求的增加,对伺服驱动器的控制技术提出了更高要求。因此PMSM构成的伺服系统的控制技术成为研究热点。针对永磁同步电机系统存在的负载转矩扰动和参数摄动等干扰,人们采用不同的思路进行解决。一方面,以经典的PID控制为基础,研究参数的在线调整。另一方面,智能控制技术、滑模变结构控制、预测控制、观测器等先进的控制理论也得到广泛地研究。 本文针对PMSM位置控制,提出一种基于自抗扰控制的双环控制方法。将ADRC引入到PMSM伺服系统的控制中,利用二阶非线性ADRC实现位置、速度的复合控制,从控制结构上将传统位置、速度、电流三环串级控制变为位置电流双环控制,可简化伺服系统的调试过程和提高动态响应速度。在建立伺服系统数学模型的基础上,给出位置环的二阶非线性ADRC、电流环一阶线性ADRC的设计方法,并对伺服系统的动态响应以及抗扰动性能进行研究。 一、ADRC抗干扰机理ADRC之所以能够有效地提高系统的抗干扰能力,关键之处在于从被控输出量中提取干扰信号,并在控制律中进行扰动补偿。为了对系统中的扰动进行观测,需要设计扩张状态观测器,其以系统实际输出y和控制量u来跟踪估计系统的状态变量和扰动量,形式如下所示: 式中:z1,z2,,zn为状态变量的观测值;zn+1为扰动估计值;01,02,,0(n+1)为观测器参数。 当i(e)为线性函数时,ESO为线性观测器;而i(e)具有非线性特性时,则为非线性观测器,通过适当选择参数来准确估计系统的状态变量和扰动值。 二、伺服系统自抗扰控制1、伺服系统扰动分析 在同步旋转坐标系下,电磁转矩Te可表示为
直流电机转速电流双闭环调速系统实验 一、 实验目的 通过实验了解直流调速系统的原理及一般组成结构,会设计并调节速度电流双闭环PID 参数。 二、 实验系统结构 本系统由以下模块构成: DSP2407以及相应的接口电路构成的控制板卡一块 电机驱动板卡一块 直流电机一个 负载轮一个 计算机一台 DSP 仿真器一个 图1 系统结构框图 图2 根据图1设计的DSP 控制板(带驱动板,可直接控制直流电机)
图3 系统组成 速度电流双闭环PID控制的程序结构如图: 提供DSP编程的编译环境,寄存器等相应设置配置完成,只需要学员自己 写PID控制程序。
图5 程序编程环境 三、实验要求 掌握直流电机的基本构成机原理、掌握利用PWM调速的原理、掌握数字PID的原理及应用、掌握双闭环调速的原理、掌握直流调速系统的构成、掌握DSP控制系统的原理及构成。 四、实验步骤 1、调节PWM占空比,观测电机电流值的变化情况。 调节DSP2407程序中的PWM占空比参数值,通过电流传感器采集电机的电流,经过A/D以后进行观察。 目的:了解对电机调速,实际就是改变PWM控制的占空比,改变直流电机的电流,从而改变直流电机的速度。 2、取消电流反馈,以单闭环PID控制电机速度。 以光电码盘数据计算的速度为反馈,设计一个数字PID控制器,控制电机以一定的速度转动。 3、速度电流双闭环控制。 加入电流反馈,设计双闭环的PID速度电流控制器。 4、位置、速度、电流三环PID控制。 加入位置控制环,设计上升下降曲线,使电机准确可靠运行。 五、实验评分 利用DSP编译器对变量的记录,可以方便显示PID算法的响应结果图, 根据响应曲线的特性,对PID算法的好坏进行评价。
双环戊二烯(简称DCPD)是环戊二烯的二聚体,主要来源于石油C5馏分及煤焦油苯头馏分。从目前我国的炼焦油水平看,每天至少可以分离出6~10万tDCPD,但至今仍然未找到很合适的用途。20世纪80年代初,DPCPD开始应用于合成不饱和树脂的系列产品中。随着DPCPD研究的深入,应用越来越广泛。 2.2双环戊二烯聚合机理 双环戊二烯聚合可以是单键打开聚合,也可以是双键打开聚合,后者为开环易位聚合。关于开环易位聚合(Ring-Opening Metathesis Polymerization,ROMP)的报道,最早始于50年代末。1960年,Eleutero[4]用LiAlH4激活的氧化铝催化降冰片烯(Norbornene,NBE),环戊二烯的开环聚合。1967年,Calderon[5]首次提出易位(metathesis)这一新概念,并指出碳碳双键的可逆断裂和再组合是烯烃易位反应机理。1970年,Herisson等[6]对环烯烃的开环易位聚合机理提出假设,认为金属卡宾是聚合的活性中心。 单体经开环易位聚合后,原有的不饱和度在聚合物的键骨架结构中仍得以保留,这一点是其他任何形式的聚合无法达到的。从IIIB族到VIII族的大部分过渡金属化合物都可以催化环烯烃的开环易位聚合,尤其是Mo,W的卡宾化合物[7~9]。近年来所合成的Mo,Ru的卡宾化合物,对各种类型的官能团都具有相当程度的忍受能力。 DCPD中无共轭双键,根据开环机理,PDCPD不是通过加成聚合形成的,而是通过环烯烃开环歧化链增长而形成,开环歧化聚合机理与无环烯烃歧化形成亚烷基的转化机理相类似,即假定催化活性中心是由过渡金属M的碳烯(M=CHR)组成,聚合过程就是把环烯烃的环和碳烯家成反应形成一种金属环烷烃,然后键断裂形成新的金属弹碳烯,最终形成具有不饱和骨架的聚合物[10]。 聚双环戊二烯(简称PDCPD)是由双环戊二烯(简称DCPD)开环聚合而得到的一种热固性交联聚合物。PDCPD具有优良的物理性能20%玻璃纤维增强的PDCPD的冲击强度,弯曲模量比尼龙和聚胺酯好的多[11~12]。它可在很宽的温度范围内保持很高的冲击强度和模量,而且PDCPD对水没有亲和作用,不会因环境的湿度不同而性能改变很大。在37 ℃时,PDCPD的抗蠕变性能比尼龙-6和聚胺酯都要好。 PDCPD的热性能优于PP,PE,PVC等常用大品种,冲击强度及弯曲弹性模量高。绝缘性好,涂装性能优异,外观也好。因此,特别适用于制造汽车外部制件,船舶构件,尤其是大型结构部件,此外,在电信,电气机器,农业机器,运动器材等方面的应用也正在开拓中。目前,日本在汽车,公共汽车和自行车等行业已进行实用开发,加拿大在机动雪橇上已进行实际应用,美国Hercules公司正在用PDCPD代替金属相某些工程塑料[13]。
双环戊二烯化学品安全技术说明书 第一部分:化学品名称 化学品中文名:二聚环戊二烯 化学英文名:dicyclopentadiene 中文名称2:双茂 英文名称2: 4,7-methylene-4,7,8,9-tetrahydroindene 技术说明书编码:1584 CAS No.:77-73-6 分子式:C 10H 12 分子量:132.2 企业名称:xxxxx 地址:xxxxx 邮编:611541 传真: 企业应急电话: 国家应急电话: 第二部分:成分/组成信息 含量:二聚环戊二烯≥98% CAS No. 77-73-6 第三部分:危险性概述
健康危害:接触高浓度本品蒸气有刺激和麻醉作用,引起眼、鼻、喉和肺刺激,头痛、头晕及其他中枢神经系统症状。有可能引起肝、肾损害。长期反复皮肤接触可致皮肤损害。 燃爆危险:本品易燃,有毒,具刺激性。 第四部分:急救措施 皮肤接触:脱去污染的衣着,用流动清水冲洗 眼睛接触:提起眼睑,用流动清水或生理盐水冲洗。就医。 吸入:迅速脱离现场至空气新鲜处。保持呼吸道通畅。如呼吸困难,给输氧。如呼吸停止,立即进行人工呼吸。就医。 食入:饮足量温水,催吐。就医 第五部分:消防措施 危险特性:其蒸气与空气可形成爆炸性混合物,遇明火、高热能引起燃烧爆炸。与氧化剂可发生反应。容易自聚,聚合反应随着温度的上升而急骤加剧。 有害燃烧产物:一氧化碳、二氧化碳。 灭火方法:消防人员须佩戴防毒面具、穿全身消防服,在上风向灭火。灭火剂:雾状水、泡沫、干粉、二氧化碳、砂土。 第六部分:泄漏应急处理 应急处理:隔离泄漏污染区,限制出入。切断火源。建议应急处理人员戴防尘面具(全面罩),穿防毒服。用洁净的铲子收集于干燥、洁净、有盖的容器中。若大量泄漏,收集回收或运至废物处理场所处置。第七部分:操作处置与储存
摘要:介绍了采用AT89C51作为控制器核心,晶闸管触发和转速测量等环节都实现全数字化的微机控制电动机双闭环调速系统。较详细说明了调速系统的硬件组成和软件设计。 关键词:AT89C51;直流电动机;调速系统 0 引言 进入20世纪80年代后,因为微电子技术的快速发展,电路的集成度越来越高,对运动控制系统产生了很重要的影响,运动控制系统的控制方式迅速向微机控制方向发展,并由硬件控制转向软件控制,智能化的软件控制将成为运动控制系统的一个发展趋势。运动系统控制器的实现方式在数字控制中也在向硬件方式发展。在软件方式中也是从运动系统的外环向内环,进而向接近电动机环路的更深层发展。目前,运动系统的数字控制大都是采用硬件与软件相结合的控制方式,其中软件控制方式一般是利用微机实现的。本文介绍了采用AT89C51作为控制器核心,晶闸管触发和转速测量等环节实现的全数字化的微机控制电动机双闭环调速系统。 1 微机控制电动机双闭环调速系统原理框图 采用AT89C51作为控制器核心,晶闸管触发和转速测量等环节都实现全数字化的微机控制电动机双闭环调速系统结构原理框图如图1所示,其内环是电流反馈及控制环,外环是电动机转速反馈及控制环,内环和外环的调节都是由AT89C51 单片微机软件完成数字PI控制律的运算。 由图1可知系统中设置的转速和电流两个调节器,为了获得良好的静、动态性能,两个调节器都采用PI调节器。这种双闭环调节器结构能恰当发挥电流截止负反馈和转速负反馈的作用。再加上微机控制系统能采用高分辨率的数字触发器和高精度数字测速装置,可以更好地满足高性能工业传动的要求。
2调速系统的硬件组成 系统的主电路是晶闸管三相全控桥,直流电动机。晶闸管触发脉冲的产生和移相由微机控制电路输出。转速的检测采用数字测速器,它是用微机读取与电动机联轴的光电编码器输出的脉冲数,经微机计算后得出转速值。整个系统的硬件结构如图2所示, 2.1 使用的主要芯片 AT89C51单片机:用作系统的监控,读取采样数据,进行PI运算,输出控制量。 8253:可编程定时计数器芯片,具有3个16位定时计数器,用于数字测速和数字触发移相。 8155:可编程I/O接口扩展芯片,用于输出三相全控桥六个晶闸管的双脉冲触发信号,并保证触发脉冲与三相电网的同步。256个片内RAM用于存放采样数据。 8279:可编程键盘、显示接口芯片,用于转速设定值和电动机起/停控制命令的读入以及电动机运行中转速、电流和系统监控状态的显示。 ADC0809:8位A/D转换芯片,将电枢电流Id的值转换为数宇量。 2.2 数字移相触发脉冲输出电路
1、目的 准确提供各分厂的实际使用刀具成本费用。为公司成本核算提供可靠依据。 2、范围 公司各分厂生产加工使用的各种刀具(剃刀、滚刀、插刀、拉刀、圆弧铣刀)3、部门分工 3.1采购部 3.1.1 提供刀具采购单价和涂层单价; 3.1.2 提供刀具报表中的刀具购买数据。 3.2分厂刀具库 3.2.1 负责刀具的维护,做好刀具使用状态的确认工作; 3.2.2 负责所属刀具报表,准确统计刀具参数; 3.2.3 监督收集各分厂工段的刀具使用情况; 3.3刀具管理科 3.3.1 监督各分厂工段现场刀具的使用情况; 3.3.2 做好刀具修磨状态的确认工作,准时做好刀具修磨记录; 3.3.3 对涂层的刀具做好及时送涂和接受工作,涂层刀具帐目准确无误; 3.3.4 协助各分厂对刀具的异常磨损,和刀具事故的调查备案工作; 3.4信息化推进室 3.4.1 每月对各分厂的刀具使用成本进行合算; 3.4.2 每月对各分厂的刀具库存,成本信息进行核对; 4、刀具成本的计算
4.1 库存刀具成本:依据刀具信息报表,台帐汇总得出各分厂的刀具库存总价以及刀 具库存剩余价值; 4.2 刀具的成本包含:涂层费用、刀具正常消耗费用、刀具非正常损耗费用, 刀具修磨加工费用; 4.2.1 涂层费用:(以采购部和涂层公司所约定的涂层单价),依据每把刀具的涂层费 用,汇总每月涂层清单,统计各分厂的当月刀具涂层总件次,计算出各分厂的月涂层刀具成本费用; 4.2.2 刀具正常损耗:根据刀具单价和标准修磨次数,折算出单次修磨损耗,(刀 具信息报表中刀具修磨记录)计算各分厂每月的刀具损耗费用; 注:“刀具标准修磨次数”根据各种刀具的有效刃长度和刀具的单次正常最大磨损量。经同各分厂厂长协调讨论,特制定出各种刀具的标准修磨次数。 刀具修磨标准次数 4.2.3 刀具非正常损耗:包括刀具的异常磨损和刀具事故,(依据各分厂每月所发生的刀 具事故,和刀具异常磨损记录报表汇总),计算出各分厂刀具的非正常损耗费用;
浅析RV减速器和谐波减速器的区别 作为核心零部件的重要组成,精密减速器是工业机器人可靠、精确运行所不可或缺的部分。而事实上,减速器有多种类别,分别是谐波齿轮减速器、摆线针轮行星减速器、RV减速器、精密行星减速器和滤波齿轮减速器。 作为工业机器人核心零部件的精密减速器,与通用减速器相比,机器人用减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。精密减速器使机器人伺服电机在一个合适的速度下运转,并精确地将转速降到工业机器人各部位需要的速度,提高机械体刚性的同时输出更大的力矩。 大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。一般将RV 减速器放置在机座、大臂、肩部等重负载的位置,即主要用于20公斤以上的机器人关节;而将谐波减速器放置在小臂、腕部或手部,即20公斤以下机器人关节。另外,行星减速器一般用在直角坐标机器人上。 RV-E型减速器 那么,两类减速器的原理和优劣势到底是什么呢? 浙江来福谐波传动股份有限公司张杰解释,谐波减速器由“柔轮、波发生器、刚轮、轴承”这四个基本部件构成。柔轮的外径略小于刚轮的内径,通常柔轮比刚轮少2个齿。波发生器的椭圆型形状决定了柔轮和刚轮的齿接触点分布在介于椭圆中心的两个对立面。波发生器转动的过程中,柔轮和刚轮齿接触部分开始啮合。波发生器每正时针旋转180°,柔轮就相当于刚轮逆时针旋转1个齿数差。在180°对称的两处,全部齿数的30%以上同时啮合,这也造就了其高转矩传送。 谐波减速器 张杰认为,相比谐波减速器,RV传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,还具有体积小、重量轻、传动比范
十、双环渗透试验 1.试验的目的及意义 双环法试验是野外测定包气带非饱和松散岩层的渗透系数的常用的简易方法,试验的结果更接近实际情况。利用这个试验,主要为研究区域性水均衡、水库、灌区、渠道渗漏量、山前地区地表水渗入量等进行的。 2.试验的适用范围 对砂土和粉土,可采用试坑法或单环法;对粘性土应采用试坑双环法。 3.试验的基本原理 在一定的水文地质边界以内,向地表松散岩层进行注水,使渗入的水量达到稳定,即单位时间的渗入水量近似相等时,再利用达西定律的原理求出渗透系数(K)值。 4.试验仪器及制样工具 渗水双环(两个高约50cm,直径分别为0.25m和0.5m的铁环)、两套带有刻度的供水桶、胶带、橡皮管,止水夹、铁锹、尺子、及若干要填在试环底部的小砾石。 5.试验步骤 (1)确定试点,开挖试坑。 确定试点有三个原则: 1)代表性。试点处的包气带岩层要能代表试区相当大范围内包气带岩层的情况; 2)一致性。试点处包气带岩层的选择应与大目标一致,如本次实例是为了选择人工回 灌点,所以选择包气带岩层渗透性能较好的部位进行试验。 3)选择试验场地,最好在潜水埋藏深度大于5m的地方为好。如果潜水埋深小于2m 时,因渗透路径太短,测得的渗透系数不真实,就不要使用渗水试验。 试坑开挖: 铲去表土,露出目标层,试坑深度应大于0.8-1.2m,试坑面积1.3×1.0m左右,以消除包气带表层植被根系对试验的影响。
(2)压入双环、铺砾、立标 将双环同心压入试坑底部中央,原则上压入0.8-1cm即可,实际中,将双环压入试层3-8cm。铺砾的目的是防止注水时将环底的沙层冲起,试验中实际铺砾3-4cm。 立标的目的在于,定水头注水时,控制环底水层厚度,一般控制在10cm,需要说明的一点是,此处所言的“水层厚度”是包括环底铺砾厚度在内的。 (3)水头注水、观测记录 以环底水标为准,保持标头刚好淹在水中,内外环同时定水头注水(随时保持内外环的水柱都保持在10cm的同一高度。这样即可认为,内外环之间渗入的水主要消耗在侧向扩散上,内环渗入的水主要消耗在垂向渗透上,为准垂向一维渗流)。 同时从供水桶观测注入水量。记录的时间,开始时因渗入量大,观测间隔时间要短,稍后可按一定时间间隔比如每10分钟观测一次。 (4)渗入速度稳定,完成试验 试验记录的过程中,绘制出渗速时间v-t曲线,当试验时间(一般为30分钟)曲线保持在一个不大的区间,再延续一段时间,如2-3h,即可结束试验。 6.试验数据 (1)随时保持内外环的水柱都保持在0.1m的同一高度。 (2)向供水瓶注水时,做好水量转换的换算
减速机项目经营分析报告 规划设计 / 投资分析
第一章项目总体情况说明 一、经营环境分析 减速器是一种由封闭在刚性壳体内的齿轮传动、蜗杆传动、齿轮-蜗杆 传动所组成的独立部件,用于低转速大扭矩的传动设备,把电动机、内燃 机或其它高速运转的动力通过减速机的输入轴上的齿数少的齿轮啮合输出 轴上的大齿轮来降低转速,增大扭矩。 不考虑传动摩擦能量损耗等因素,在给定功功率情况下,转速与扭矩 成反比,减速机通过降低转速来达到增大扭矩作用。 减速机广泛应用于环保、建筑、电力、化工、食品、物流、塑料、橡胶、矿山、冶金、石油、水泥、船舶、水利、纺织、印染、饲料、制药等 行业。其中,起重运输行业使用减速机产品的数量占比约为25.02%,水泥 建材行业使用减速机产品的数量占比约为14.89%,重型矿山行业占比约为9.76%。 减速机作为传动机械的重要基础部件,是装备制造业的重要组成部分,“十三五”期间,中国大力推行制造业升级,专用机械、通用机械等设备 将受益于政策红利,向精细化、绿色化、数字化发展,进而为减速机需求 市场提供巨大发展空间。
根据机经网数据,近年来中国减速机产量波动较大,2018年,中国减 速机产量为563.03万台,同比下降16.1%,2019年1-7月,中国减速机产 量为463.59万台,同比增长31.6%。 减速器制造技术上国产企业和纳博特斯克、Harmonic等外企差距较大,短期内难以突破。技术的差距不仅表现在研发难度上,还体现在国产减速 器成本普遍偏高,使得一部分国产厂家虽然已经拥有自主研发的减速器, 但是由于成本问题依然无法投入大规模量产。 目前国产减速器厂家主要包括绿的谐波、浙江来福、中技克美、南通 振康、秦川机床等,但在全球市场占有率仍然较低,在机密减速机领域, 纳博特斯克及哈默纳科占据了全球约75%市场份额。 减变速机作为机械传动的重要基础部件,是国民经济发展及装备制造 业的重要组成部分和重要部件。随着我国制造业的全面升级,减变速机行 业发生了巨大的变化,减变速机技术发展迅速,重大装备的设计、制造和 系统集成能力都得到大幅提高,产品向重载、高硬度、高精度、高速度、 高可靠性、高效率方向迈进。 随着数控化制造技术和模块化设计制造方式的成功运用,减变速机产 品制造水平进一步提升,生产效率与产品质量明显提高。 工业机器人主要包括控制系统、动力系统及本体机械结构三大部分。 减速机是动力系统子结构传动装置的核心零部件,其主要功能是达到减速 增矩的作用,从价值量看,减速器占比机器人本体制造成本的30%以上。
您现在的位置:首页- 关于双环- 企业简介 浙江双环传动机械股份有限公司,成立于2006年,是一家专业生产汽车齿轮、摩托车齿轮、电动工具齿轮、工程机械齿轮的股份制企业。公司依托“专业化大生产”,本着“好一点,好很多”的经营理念,在中国齿轮行业脱颖而出,成为我国齿轮散件生产规模最大、实力最强的齿轮生产企业之一。 公司共有四大厂区,分别座落在玉环县城关的南大岙厂区,玉环县机电工业园区,玉环沙门工业园区、江苏淮安楚州工业园区。 公司拥有美国格里森数控高效滚齿机,德国格里森ZH125强力珩齿机,德国格里森—胡尔特公司剃刀磨床、德国卡普公司的高精度KAPP磨齿机,日本清和数控高效滚齿机,法国ECM公司低压真空渗碳淬火炉,YK7232和YK7236型蜗杆磨齿机,YH601CNC 型数控弧齿锥齿轮铣齿机,热处理连续线等国内外先进设备1000多台。 检验、测量和试验设备有德国克林贝格公司生产的全自动数控齿轮测量中心P26、P40C,国产JD26型测量中心,NCF1086三坐标测量机,英国泰勒公司生产的圆度仪、轮廓粗糙度仪,美国热电公司的ARL3460光谱分析仪;滚刀检查仪、JX13万能工具显微镜、理化检测设备、探伤机等。设有计量室、理化室专门从事量值传递、精密测量、物理性能试验和化学分析各项工作。 公司非常重视内部管理水平的提高,导入日本丰田的生产管理模式,并长期聘请日本丰田公司专家蹲点公司现场指导,取得了明显的效果,公司正努力建设精益型企业。公司在抓精益生产的同时,强调企业信息化建设,从2006年开始导入ERP管理,2007年正式上线,目前,公司已经在ERP、PDM(图文档案无纸化管理)、OA(无纸化办公)全部实现系统化管理,企业信息化管理达到了比较高的水平。 公司以生产出顾客满意的产品为第一要务,以质量第一、至诚至信、有效服务为原则。公司通过ISO/TS16949:2002现场审核,并取得德国TUV公司国际认证证书;2007年8月通过ISO14001:2004环境管理体系认证,并取得德国TUV公司国际认证证书。目前本公司的主要产品有:摩托车齿轮、汽车齿轮、缝纫机齿轮、电动工具齿轮、工程机械齿轮等。公司大批量生产的产品品质完全能达到国际标准6级以上水平。 公司坚持走市场全球化的战略,并取得了成功。目前拥有BOSCH(博世公司)、BorgWarner(博格华纳)、BLACK& DECKER(百得公司)、DANA(德纳)、DEMAG(德马格公司)、FIA T(菲亚特集团)、JOHNDEERE(约翰迪尔)、ZF(采埃孚公司)等一批世界500强的重要客户。 双环公司以“改变齿轮行业自给自足的格局,成为齿轮(零件)制造的领先者”作为企业的愿景。双环将依托客户,携手同行,打造世界一流零部件制造企业。 您现在的位置:首页- 关于双环- 企业荣誉 2011年度 2011年4月五星级力帆摩托供应商 2010年度 2010年1月东安汽车颁发的“2009年度优秀质量供应商”
基于Buck变换器的双环开关调节系统的设计和仿真 【摘要】Buck电路是一种降压斩波器,降压变换器输出电压平均值V o等于占空比乘以输入电压Vin。通常电感中的电流是否连续,取决于负载的大小,所以简单的BUCK电路输出的电压不稳定,一旦负载突变会造成严重后果。加入闭环控制系统,输出电压经采样环节后和参考电压比较,同时在此基础上引入电流反馈,得到的误差信号送至控制器,控制器输出信号送至PWM环节和锯齿波时钟信号比较,改变占空比d即可调节开关变换器的输出电压,达到稳定电压的目的。 【关键词】Buck电路;闭环控制;PWM环节 1.引言 随着电力电子技术的迅速发展,高频开关电源变换器已广泛应用于计算机、电信、航空航天等领域。其核心是电能形式的变换和控制,并通过电力电子电路实现其应用。Buck变换器是开关电源变换器中最常见的一种,主要应用于低压大电流领域,有众多拓扑。但简单的Buck电路输出电压不稳定且会受到负载和外部的干扰。为了达到稳定输出电压的目的,在电压反馈的基础上引入电流反馈实现双环控制,获得较好的动态性能。 2.Buck变换电路控制系统的基本原理 2.1 单闭环调节系统的设计和主电路模型 具有电压控制的Buck变换器开关调节系统如图1所示,主电路为Buck变换电路[1],控制电路采用电压负反馈。在负反馈电路中,输出电压U经采样后与给定的参考电压U比较,得到误差信号Ue送至控制器,控制器输出信号Uc 送至PWM环节,与PWM环节中的振荡器产生的锯齿波时钟信号比较,使比较器输出周期不变,脉冲宽度即占空比d受Uc调制的一系列脉冲信号,再通过驱动器将脉冲信号放大,控制变换器的功率开关器件的导通与关断。由于电压和负载发生变化,或系统受到其他因素干扰使输出电压发生波动时,通过负反馈回路[2]可调节开关变换器的功率器件在一个开关周期内的导通时间,达到稳定输出电压的目的。 2.2 双环开关调节系统的设计 为了克服单环系统在控制和环节上的延迟,在电压反馈的基础上引入电流反馈实现双环控制,可获得较好的动态性能。双环开关调节系统[3]框图如图2所示。电流控制环是由开关变换器﹑电流采样器I/V、电流控制器和开关控制器组成。电流采样器的作用是将主电路的电感电流iL或功率开关管的电流或整流二极管的电感电流变换为电压信号URs。BU是电压控制器,其作用是将输出电压U与参考电压Uref相比较产生误差电压信号UCP,为电流控制环提供控制信号。
双环传动2020年一季度决策水平报告 一、实现利润分析 2020年一季度实现利润为负1,639.58万元,与2019年一季度的 4,758.79万元相比,2020年一季度出现亏损,亏损1,639.58万元。企业亏损的主要原因是内部经营业务,应当加强经营业务的管理。2020年一季度营业利润为负1,662.91万元,与2019年一季度的4,685.56万元相比,2020年一季度出现亏损,亏损1,662.91万元。营业收入大幅度下降,企业出现经营亏损,企业经营形势恶化,应迅速调整经营战略。 二、成本费用分析 2020年一季度双环传动成本费用总额为58,579.2万元,其中:营业成本为50,592.07万元,占成本总额的86.37%;销售费用为1,735.79万元,占成本总额的2.96%;管理费用为2,852.82万元,占成本总额的4.87%;财务费用为3,371.07万元,占成本总额的5.75%;营业税金及附加为317.35万元,占成本总额的0.54%。2020年一季度销售费用为1,735.79万元,与2019年一季度的2,458.79万元相比有较大幅度下降,下降29.4%。2020年一季度在销售费用大幅度下降的同时营业收入也出现了较大幅度的下降,企业市场销售形势迅速恶化,并引起盈利能力的下降,应当采取措施,调整销售力量和战略。2020年一季度管理费用为2,852.82万元,与2019年一季度的3,300.63万元相比有较大幅度下降,下降13.57%。2020年一季度管理费用占营业收入的比例为4.93%,与2019年一季度的4.36%相比有所提高,提高0.57个百分点。这在营业收入大幅度下降情况下常常出现,但要采取措施遏止盈利水平的大幅度下降趋势。 三、资产结构分析 双环传动2020年一季度资产总额为834,806.93万元,其中流动资产为297,205.56万元,主要分布在存货、应收账款、货币资金等环节,分别占企业流动资产合计的39.77%、21.85%和20.92%。非流动资产为 537,601.37万元,主要分布在固定资产和在建工程,分别占企业非流动资