平曲线视距横净距
的计算
发表人:王乃坤江树华
单位:龙建路桥股份有限公司第二工程处
日期:二OO四年十二月十五三十日
平曲线视距横净距的计算
王乃坤江树华
(龙建路桥股份有限公司第二工程处)
提要:本文介绍用计算机计算平曲线及相邻直线段上任一点的横净距的方法。
关键词:平曲线横净距计算机计算
Calculating about the Cross Clearance Distance of Horizontal Curve Stadia
WANG Nai-kun JIANG Shu-hua QU Zhi-cheng
Abstract:Calculating method of horizontal curve and crossclearance distance with computer is presented.
Key words:Horizontal curve Cross clearance distance Computer
1 前言
如何准确计算平曲线及相邻直线段上任一点的横净距,是我们工程技术人员在实际工作中常遇到的问题。近期我们成功地利用计算机程序解决了带缓和曲线的平曲线横净距计算,省时省力,起到了事半功倍的效果。现介绍如下,仅供参考。
2 横净距的计算方法
2.1 计算原理
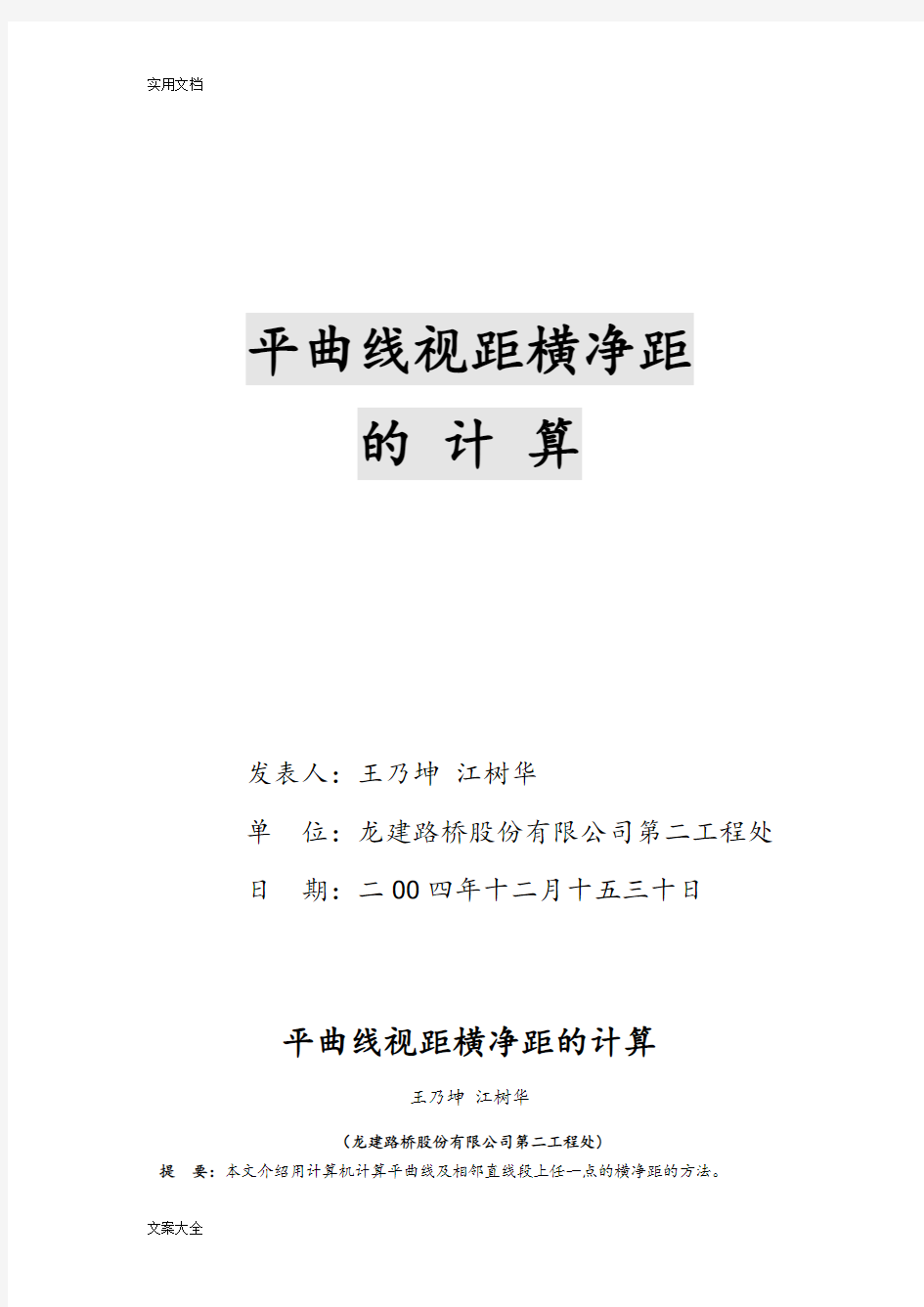
如图1所示,某交点转角为α,平曲线半径为R1,缓和曲线长为Ls1(我们将圆曲线作为Ls1=0的特例处理)。若行车道宽度为b,则计算横净距时的行车轨迹线(距未加宽时的行车道内侧边缘1.5m,图中虚曲线所示)与路中线的径向间距△R=b/2-1.5。M为平曲线和相邻直线段上的任一点,M所在断面的横净距可按下法计算:在M点的法线MN两侧的行车轨迹线上分别找一点A、B,使A、B两点间沿行车轨迹线的长度等于设计视距S,计算AB连线与MN的交点E到M点的距离值H;保持A、B两点间沿行车轨迹线的长度不变,使A、B两点沿行车轨迹线同步移动时,H 值也随之改变,最大的H值与△R之差即为M点的横净距。
2.2 行车轨迹线参数的确定
对于半径为R1、缓和曲线长度为L S1的平曲线,行车轨迹线上对应的曲线半径R2=R1-△R,对应的缓和曲线长度L S2应是多少呢?
我们分别用p、q、E、T表示圆曲线设置缓和曲线后的内移值、切垂距、外距、切线长,并分别用下标1、2对路中线、行车轨迹线上有关的量进行的区分。如图2所示,因路中线与行车轨迹线的径向间距为△R,则应有:
图二
将有关各量代入并整理后可得:
在R1 R2 L S1是定值的情况下,使△p、△q同时等于零是不可能的(L S1=0时除外)。也就是说,无论L S2取何值,由R2 L S2确定的轨迹线(下文中称之为计算行车轨迹线)与理论行车轨迹线(距未加宽时的行车道内侧边缘1.5m)不可能完全重合,两轨迹线间的偏离程度可表示为:
将有关各量代入并整理后可得:
上式中,△E表示计算行车轨迹线与理论行车轨迹线的曲线中点间的距离,△T表示两轨迹线上的曲线起(终)点沿切线方向的距离。
既然计算行车轨迹线与理论行车轨迹线不能完全重合,那么我们能否选取适当的L S2值,使两轨迹线尽量接近,从而满足横净距计算的精度要求呢?由(1)、(2)式可以看出,△p对两轨迹线间
偏离程度的影响远比△q的影响大,如果我们通过L S2的取值使△p等于零,即用牛顿迭代法按下式解算L S2
此外,两迹线的偏离程度可表示为:
△E=0 △T=△q
两轨迹线在圆曲线段重合,下面我们来看看两轨迹线在缓和曲线段的偏离情况。
如图3所示,A为路中线上缓和曲线段内的任一点,距缓和曲线起点ZH1的长度为L1,在xoy 坐标系中的坐标为(X A,Y A),A点的法线AF与x轴的夹角为:
沿法线AF由A点向曲线内侧移动△R得B点,则B点的坐标为:
由路中线与理论行车轨迹线的关系知:B点在理论行车轨迹线上。
令C点为计算行车轨迹线上缓和曲线段内一点,距缓和曲线段起点ZH2的长度为L2,在x'o'y'坐标系中的坐标为(x'c,y'c),经坐标轴平移后可得C点在xoy坐标系中的坐标:
若X c=X b,则(Y c-Y b)cos(γ-π/2)即可视为该位置处计算行车轨迹线与理论行车轨迹线间的径向偏离值。
按上述方法,我们用计算机对《公路曲线测设用表》(第二册)中“缓和曲线长度总表”列出的R1、Ls1的所有组合进行了有关计算。计算结果表明:计算行车轨迹线与理论行车轨迹线在缓和曲线段的径向偏离值有以下特点:
(1)两轨迹线在缓和曲线段中部的偏离值最大,向两端逐渐趋于零;
(2)Ls1值不变时,R1值愈小,两轨迹线在缓和曲线段的偏离值就愈大;
(3)R1值不变时,Ls1愈大,两轨迹线在缓和曲线段的偏离值就愈大;
(4)表列各种组合中,两轨迹线在缓和曲线段的最大偏离值一般均小于0.01m,最大偏离值超过0.01m的组合只有以下4个:
①R1=65、Ls1=60、b=7.5时,最大偏离值为 0.015m;
②R1=60、Ls1=60、b=7.5时,最大偏离值为 0.018m;
③R1=35、 Ls1=35、 b=6时,最大偏离值为 0.012m;
④R1=30、 Ls1=35、 b=6时,最大偏离值为 0.016m。
通过对两轨迹线间偏离值的计算可知:由R2=R1-△R和按(3)式解算的Ls2确定的计算行车轨迹线与理论行车轨迹线非常接近(Ls1=0时两轨迹线重合),若用计算行车轨迹线代替理论行车轨迹线来计算横净距,最大误差不会超过0.02m,完全能够满足横净距计算的精度要求。
2.3 横净距的计算
为方便计算,我们也用桩号表示行车轨迹线上各点间的相对位置关系,并假定行车轨迹线上曲线起点ZH2(ZY2)与路中线上曲线起点ZH1(ZY1)的桩号相同(两线上的桩号是相互独立的)。这样对于任一给定的桩号,能且只能在行车轨迹线上找到一点与之对应。
如图1,欲求横净距的断面M的桩号为L0,我们不妨先假设行车轨迹线上视距起终点A、B的桩号分别为L0-S/2、L0+S/2(在应用范围内,A、B不会落在法线MN的同一则),此时沿行车轨迹线A、B间的长度等于设计视距S,计算AB与MN的交点到M点的距离值H;然后将A、B两点沿行车轨迹线向前移动0.01m,即A、B点的桩号同时增大0.01m,再计算MN与新直线AB的交点到M点的距离值H。根据两次计算的距离值H的大小,使A、B向距离值H增大的方向同步等量逐渐移动(以保证沿行车轨迹线A、B间的长度恒等于设计视距S)直到距离值H开始减小为止,此时的距离值H与△R之差即为M点的横净距。
按上述方法,我们编写了计算横净距的程序。
3 实例应用
鹤大公路鸡牡段林口支线为山岭区三级公路,行车道宽6m,设计视距(二倍停车视距)S=60m;JD2转角α=76°32′,曲线半径100m,缓和曲线长Ls=25m,曲线起点桩号为K2+838.68,计算各有关断面的横净距。
程序运行时的操作及计算结果如下(带下画线者为输入的数据):
曲线起点桩号?838.68
转角:?76°?32′?0〃
平曲线半径?100
缓和曲线长?25
行车道宽度?6
设计视距?60
曲线主点桩号:
ZH=838.68
HY=863.68
QZ=917.97
YH=972.26
HZ=997.26
断面桩号(<0结束)?800横净距:0.00
断面桩号(<0结束)?820横净距:0.34
断面桩号(<0结束)?838.68横净距:1.41 断面桩号(<0结束)?840横净距:1.53
断面桩号(<0结束)?860横净距:3.52
断面桩号(<0结束)?863.68横净距:3.80 断面桩号(<0结束)?880横净距:4.45
断面桩号(<0结束)?900横净距:4.53
断面桩号(<0结束)?917.97横净距:4.53 断面桩号(<0结束)?920横净距:4.53
断面桩号(<0结束)?940横净距:4.53
断面桩号(<0结束)?960横净距:4.37
断面桩号(<0结束)?980横净距:3.14
断面桩号(<0结束)?997.26横净距:1.41
断面桩号(<0结束)?1000横净距:1.19
断面桩号(<0结束)?1020横净距:0.23
断面桩号(<0结束)?1040横净距:0.00
断面桩号(<0结束)?-1
OK
4 源程序
10 CLEAR:DEFDBL A-H, K-Z:PI=3.141592653589793#
20 CLS:LOCATE 11,1:INPUT 〃曲线起点桩号:〃;ZH1
30 PRINT〃转角:
40 LOCATE 12,6:INPUT ZJ1:LOCATE 12,14:INPUT ZJ2:LOCATE 12,22:INPUT ZJ3 50 INPUT〃平曲线半径=〃;R1:INPUT〃缓和曲线长=〃;LS1
60 INPUT〃平曲线半径=〃;LMK:INPUT〃设计视距=〃;S
70 ZJ=(ZJ1+ZJ2/60+ZJ3/3 600)*PI/180:DR=LMK/2-1.5:R2=R1-DR
80 IF LS1>0 THEN GOSUB 640:REM 计算LS2
90 R=R1:LS=LS1:GOSUB 710:LY1=LY:P1=P:Q1=Q:T1=T
100 R=R2:LS=LS2:GOSUB 710:LY2=LY:P2=P:Q2=Q:T2=T
110 DT=Q1-Q2:ZH2=ZH1:SS=S/2/R2*R1
120 HY1=ZH1+LS1:YH1=HY1+LY1:HZ1=YH1+LS1:QZ1=(ZH1+HZ1)/2
130 HY2=ZH2+LS2:YH1=HY2+LY2:HZ2=YH2+LS2:QZ2=(ZH2+HZ2)/2
140 PRINT 〃曲线主点桩号:〃:A $=〃######.##〃:IF LS1=0 THEN 180
150 PRINT〃ZH=〃;USING A $;ZH1:PRINT〃 HY=〃;USING A $;HY1
160 PRINT〃QZ=〃;USING A $;QZ1:PRINT〃 YH=〃;USING A $;YH1
170 PRINT〃HZ=〃;USING A $;HZ1:GOTO 200
180 PRINT〃ZY=〃;USING A $;ZH1:PRINT〃 QZ=〃;USING A $;QZ1
190 PRINT〃YZ=〃;UXING A $;HZ1
200 INPUT〃断面桩号(<0结束)〃;L0:IF L0<0 THEN 450
210 IF L0<=ZH1-S OR L0>=HZ1+S THEN H=0:GOTO 440
220 IF L0>QZ1 THEN L0=ZH1+(HZ1-L0):REM若欲求横净距断面在曲线后半部,则计算曲线前半部对称位置的横净距
230 IF L0-SS>=HY1 AND L0+SS<=YH1 THEN H=R2*(1-COS(S/2/R2)):GOTO 440
240 R=R1:LS=LS1:P=P1:Q=Q1:X0=T1+T1*COS(ZJ):Y0=T1*SIN(ZJ):IF ABS(ZJ-PI)<1E-10 THEN X0=0 Y0=2*(R1+P1)
250 IF L0<=ZH1 THEN A0=PI/2:X=L0-ZH1:Y=0:GOTO 300
260 IF L0>=HZ1 THEN A0=ZJ+PI/2:X=HZ1-L0:Y=0:GOSUB 620:GOTO 300
270 IF L0>YH1 THEN L=HZ1-L0:A0=ZJ+PI/2-L^ 2/2/R1/LS1:GOSUB 600:GOSUB 620:GOTO 300
280 IF L0>=HY1 THEN L=L0-HY1+LS1/2:A0=L/R1+PI/2:GOSUB 590:X=X+Q:Y=Y +P:GOTO 300
290 L=L0-ZH1:A0=L^ 2/2/R1/LS1+PI/2:GOSUB 600
300 XM=X-DT:YM=Y-DR
310 IF A0=PI/2 THEN A1=1:B1=0:C1=-XM ELSE K=TAN(A0):A1=K:B1=-1:C1=YM -K*XM
320 R=R2:LS=LS2:P=P2:Q=Q2:X0=T2+T2*COS(ZJ):Y0=T2*SIN(ZJ):IF ABS(ZJ-PI)<1E-10 THEN X0=0:Y0=2*(R2+P2)
330 A=L0-S/2:B=L0+S/2:GOSUB 460:H1=H:A=A+.01:B=B+.01:GOSUB 460:A=A -.01:B=B-.01
340 REM 分别以10m、1m、0.1m、0.01m的步距使A、B两点向H值增大的方向移动,以减少计算次数
350 D=100:IF H<H1 THEN F=-1 ELSE F=1
360 IF H=H1 AND B<=ZH2 THEN F=1
370 IF H=H1 AND A>HZ2 THEN F=-1
380 FOR I=1 TO 3:D=D/10:D1=D*F
390 FOR J=1 TO 100:A=A+D1:B=B+D1:GOSUB 460
400 IF H<=H1 THEN A=A-D1:B=B-D1:GOTO 420
410 H1=H:NEXT J
420 NEXT I
430 H=H1-DR
440 U=CSRLIN:LOCATE U-1,48:PRINT〃横净距:〃;USING〃###.##〃;H:GOTO 200450 END
460 REM计算视线AB与法线MN的交点E至M点的距离H值
470 G=A:GOSUB 520:XA=X:YA=Y
480 G=B:BOSUB 520:XB=X:YB=Y
490 A2=YB-YA:B2=XA-XB:C2=(XB-XA)*YA-(YB-YA)*XA
500 AB=A1*B2-A2*A2*B2:XE=(B1*C2-B2*C1)/AB:YE=-(A1*C2-A2*C1)/AB
510 H=SQR((XE-XM)^ 2+(YE-YM)^ 2):RETURN
520 REM计算行车轨迹线已知桩号的任一点的坐标
530 IF G<=ZH2 THEN X=G-ZH2:Y=0:RETURN
540 IF G>=HZ2 THEN X=HZ2-G:Y=0:GOSUB 620:RETURN
550 IF LS2=0 THEN L=G-ZH2:GOSUB 590:RETURN
560 IF G>YH2 THEN L=HZ2-G:GOSUB 600:GOSUB 620:RETURN
570 IF G>HY2 THEN L=G-HY2+LS2/2:GOSUB 590:X=X+Q:Y=Y+P:RETURN
580 L=G-ZH2:GOSUB 600:RETURN
590 X=R*SIN(L/R):Y=R*(1-COS(L/R)):RETURN
600 C=R*LS:X=L-L^ 5/40/C^ 2+L^ 9/3 456/C^ 4
610 Y=L^ 3/6/C-L^ 7/336/C^ 3+L^ 11/42 240! /C^ 5:RETURN
620 XI=-X*COS(ZJ)-Y*SIN(ZJ):YI=Y*COS(ZJ)-X*SIN(ZJ)
630 X=XI+X0:Y=Y1+Y0:TETURN
640 REM用牛顿迭代法计算LS2
650 LS2=LS1
660 FOR I=1 TO 10
670 FX=LS2^ 2/24/R2-LS2^ 4/2 688/R2^ 3+LS2^ 6/506 880! /R2^ 5-LS1^ 2/24/R1+LS1^ 4/2 688/R1^ 3-LS1^ 6/506 880! /R1^ 5
680 DX=LS2/12/R2-LS2^ 3/672/R2^ 3+LS2^ 5/84 480! /R2^ 5
690 LS2=LS2-FX/DX:PRINT LS2:NEXT I
700 RETURN
710 BT=LS/2/R:LY=R*ZJ-LS:IF LS=0 THEN 730
720 L=LS:GOSUB 600:Q=X-R*SIN(BT):P=Y-R*(1-COS(BT))
730 IF ZJ=PI THEN RETURN
740 T=(R+P)*TAN(ZJ/2)+Q:RETURN
公路最大横净距(视距)计算程序 使 用 手 册 二O一四年九月
前言 行车视距是汽车在道路上行驶时向前能看得见的路线距离。 为了行车安全,驾驶员应能随时看到汽车前面相当远的一段路程,一旦发现公路上有障碍物或迎面开来的车辆,能及时采取措施,防止汽车与障碍物或汽车与汽车相碰。不论在道路的平面弯道上或在纵断面的变坡处,都应保证这种必需的最短安全视距。行车最短安全视距的长度主要取决于车速和汽车在路面上的制动性能。 行车视距包括停车视距、会车视距、错车视距和超车视距,另外还有弯道视距、纵坡视距及平面交叉口视距。停车视距是指驾驶员发现前方有障碍物,使汽车在障碍物前停住所需要的最短距离;会车视距是在同一车道上有对向的车辆行驶,为避免相碰而双双停下所需要的最短距离;超车视距是快车超越前面的慢车后再回到原来车道所需要的最短距离。会车视距为停车视距的两倍。中间无分隔带的道路应能保证会车视距,对有中间分隔带的较高级道路可仅保证停车视距。对向行驶的双车道道路,根据需要结合地形设置具有足够超车视距的路段。为此,在道路设计中,在平面弯道和交叉口处应注意清除内侧障碍,在纵断面的凸形变坡处,应注意采用足够大的竖曲线半径。 确定行车视距的定量数值,须研究:①汽车驾驭员的感觉时间和制动反应时间,它因人而异,且随很多自然和人为因素而变化;②汽车制动效率,它随轮胎花纹与气压和路面类型与湿滑程度而异。 视距计算程序则采用基于AutoCAD的VBA编写的应用程序,能够计算各种复杂线形的最大横净距,并能够绘制视距包络图。 本手册参照《公路路线设计规范》JTG D20-2006、《公路路线设计细则》校审稿、湖北省交通规划设计院研发视距计算程序教程等相关资料整理,如有不足之处,请见谅。 视距计算程序下载可至。
一、视距测量的概念 视距测量是根据几何光学原理,利用仪器望远镜筒内的视距丝在标尺上截取读数,应用三角公式计算两点距离,可同时测定地面上两点间水平距离和高差的测量方法。视距测量的优点是,操作方便、观测快捷,一般不受地形影响。其缺点是,测量视距和高差的精度较低,测距相对误差约为1/200~1/300。尽管视距测量的精度较低,但还是能满足测量地形图碎部点的要求,所以在测绘地形图时,常采用视距测量的方法测量距离和高差。 二、视距测量的计算公式 (一)望远镜视线水平时测量平距和高差的计算公式 如图4-7 所示,测地面两点的水平距离和高差,在点安置仪器,在点竖立视距尺,当望远镜视线水平时,水平视线与标尺垂直,中丝读数为,上下视距丝在视距尺上的位置读数之差称为视距间隔,用表示。 1、水平距离计算公式 设仪器中心到物镜中心的距离为,物镜焦距为,物镜焦点到点的距离为,由图4-7可知两点间的水平距离为,根据图中相似三角形成比例的关系得两点间水平距离为: (4-7)式中:为视距乘常数,用表示,其值在设计中为100。为视距加常数,仪器设计为0。 则视线水平时水平距离公式:
(4-8) 式中—视距乘常数其值等于100。 —视距间隔。 2、高差的计算公式: 两点间的高差由仪器高和中丝读数求得,即: (4-9) 式中:—仪器高,地面点至仪器横轴中心的高度。 (二)望远镜视线倾斜时测量平距和高差的公式 在地面起伏比较大的地区进行视距测量时,需要望远镜倾斜才能照准视距标尺读取读数,此时视准轴不垂直于视距标尺,不能用式4-8计算距离和高差。如图4-8所示,下面介绍视准轴倾斜时求水平距离和高差的计算公式。 视线倾斜时竖直角为,上下视距丝在视距标尺上所截的位置为,,视距间隔为,求算、两点间的水平距离。 首先将视距间隔换算成相当于视线垂直时的视距间隔之距离,按式4-8求出倾斜视线的距离′,其次利用倾斜视线的距离′和竖直角计算为水平距离。因上下丝的夹角很小,则认为∠和∠为90°,设将视距尺旋转角,根据三角函数得视线倾斜时水平距离计算式为式(4-10),两点高差计算公式为式(4-11)。
拉坡后,坡度差已知,变坡点高程已知,切线上各点和高程也就知道了。选定竖曲线半径R ,用竖距计算公式求出切线上各点的竖距,切线高程减竖距就是竖曲线高程。竖距公式如下: 一、路线转角、交点间距的计算 (一)在地形图上量出路线起终点及各路线交点的坐标: ()()()21Q 23810,27180JD 2399626977JD 2468426591D 、,、,、()3JD 24848025885,、()4JD 2535025204,、()ZD 2606225783, (二)计算公式及方法 设起点坐标为()00,QD X Y ,第i 个交点坐标为(),,1,2,3,4,i i i JD X Y i =则坐标增量11,i i i i DX X X DY Y Y --=-=- 交点间距D =象限角 arctan DY DX θ= 方位角A 是由象限角推算的: 转角1i i i A A α-=- 1.1JD QD 与之间: 坐标增量10=2396623810=1860DX X X =--> 1026977271802030DY Y Y =-=-=-<
交点间距275.33D m === 象限角 203 arctan arctan 47.502186 DY DX θ-=== 方位角036036047.502312.498A θ=-=-= 2.12JD JD 与之间: 坐标增量21X =2468423966=6880DX X =--> 21Y 26591269773860DY Y =-=-=-< 交点间距788.89D m === 象限角 386 arctan arctan 29.294688 DY DX θ-=== 方位角136036029.294330.706A θ=-=-= 转角110=330.706312.49818.208A A α-=-= 3. 23JD JD 与之间: 坐标增量32X =2484024684=1560DX X =--> 32Y 25885265917060DY Y =-=-=-< 交点间距723.03D m === 象限角 706 arctan arctan 77.54156 DY DX θ-=== 方位角236036077.54282.46A θ=-=-= 转角221=282.46330.70648.246A A α-=-=- 4. 34JD JD 与之间: 坐标增量43X =2535024840=5100DX X =--> 43Y 25204258856810DY Y =-=-=-< 交点间距850.8D m === 象限角 510 arctan arctan 53.171681 DY DX θ===- 方位角336036053.171306.829A θ=-=-= 转角332=306.829282.4624.369A A α-=-=
平曲线视距横净距 的计算 发表人:王乃坤江树华 单位:龙建路桥股份有限公司第二工程处 日期:二OO四年十二月十五三十日 平曲线视距横净距的计算 王乃坤江树华 (龙建路桥股份有限公司第二工程处) 提要:本文介绍用计算机计算平曲线及相邻直线段上任一点的横净距的方法。 关键词:平曲线横净距计算机计算 CalculatingabouttheCrossClearanceDistanceofHorizontalCurveStadia WANGNai-kunJIANGShu-huaQUZhi-cheng Abstract:Calculatingmethodofhorizontalcurveandcrossclearancedistancewithcomputerispresented. Keywords:HorizontalcurveCrossclearancedistanceComputer 1前言 如何准确计算平曲线及相邻直线段上任一点的横净距,是我们工程技术人员在实际工作中常遇到的问题。近期我们成功地利用计算机程序解决了带缓和曲线的平曲线横净距计算,省时省力,起到了事半功倍的效果。现介绍如下,仅供参考。 2横净距的计算方法 2.1计算原理 如图1所示,某交点转角为α,平曲线半径为R1,缓和曲线长为Ls1(我们将圆曲线作为Ls1=0的特例处理)。若行车道宽度为b,则计算横净距时的行车轨迹线(距未加宽时的行车道内侧边缘1.5m,图中虚曲线所示)与路中线的径向间距△R=b/2-1.5。M为平曲线和相邻直线段上的任一点,M所在断面的横净距可按下法计算:在M点的法线MN两侧的行车轨迹线上分别找一点A、B,使A、B两点间沿行车轨迹线的长度等于设计视距S,计算AB连线与MN的交点E到M点的距离值H;保持A、B两点间沿行车轨迹线的长度不变,使A、B两点沿行车轨迹线同步移动时,H 值也随之改变,最大的H值与△R之差即为M点的横净距。 2.2行车轨迹线参数的确定
平曲线视距横净距的计算 Prepared on 22 November 2020
平曲线视距横净距 的计算 发表人:王乃坤江树华 单位:龙建路桥股份有限公司第二工程处 日期:二OO四年十二月十五三十日 平曲线视距横净距的计算 王乃坤江树华 (龙建路桥股份有限公司第二工程处) 提要:本文介绍用计算机计算平曲线及相邻直线段上任一点的横净距的方法。 关键词:平曲线横净距计算机计算 CalculatingabouttheCrossClearanceDistanceofHorizontalCurveStadia WANGNai-kunJIANGShu-huaQUZhi-cheng Abstract:Calculatingmethodofhorizontalcurveandcrossclearancedistancewithcomputerispresented. Keywords:HorizontalcurveCrossclearancedistanceComputer 1前言 如何准确计算平曲线及相邻直线段上任一点的横净距,是我们工程技术人员在实际工作中常遇到的问题。近期我们成功地利用计算机程序解决了带缓和曲线的平曲线横净距计算,省时省力,起到了事半功倍的效果。现介绍如下,仅供参考。 2横净距的计算方法 计算原理 如图1所示,某交点转角为α,平曲线半径为R1,缓和曲线长为Ls1(我们将圆曲线作为 Ls1=0的特例处理)。若行车道宽度为b,则计算横净距时的行车轨迹线(距未加宽时的行车道内侧边缘,图中虚曲线所示)与路中线的径向间距△R=b/2-。M为平曲线和相邻直线段上的任一点,M所在断面的横净距可按下法计算:在M点的法线MN两侧的行车轨迹线上分别找一点
如图8-5所示,如果我们把竖立在B 点上视距尺的尺间隔MN ,化算成与视线相垂直的尺间隔M ′N ′,就可用式(8-2)计算出倾斜距离L 。然后再根据L 和垂直角α,算出水平距离D 和高差h 。 从图8-5可知,在△EM ′M 和△EN ′N 中,由于φ角很小(约34′),可把∠EM ′M 和∠EN ′N 视为直角。而∠MEM ′=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就是假设视距尺与视线相垂直的尺间隔l ′, 图8-5 视线倾斜时的视距测量原理
MN 是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间的水平距离为: αα2cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离的计算公式。 由图8-5可以看出,A 、B 两点间的高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 2 1 sin cos sin Kl Kl L h = ==' (8-5) 所以 v i Kl h -+=α2sin 2 1 (8-6) 式(8-6)为视线倾斜时高差的计算公式。
二、视距测量的施测与计算 1.视距测量的施测 (1)如图8-5所示,在A 点安置经纬仪,量取仪器高i ,在B 点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B 点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l 。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。 (4)根据尺间隔l 、垂直角α、仪器高i 及中丝读数v ,计算水平距离D 和高差h 。 2.视距测量的计算 例8-1 以表8-1中的已知数据和测点1的观测数据为例,计算A 、1两点间的水平距离和1点的高程。 解 ()[]m 14.15784812cos m 574.1100cos 2 2 1 ='''?+??==αKl D A v i Kl h A -+=α2sin 2 1 1
竖曲线及平纵线形组合设计 (纵断面上相邻两条纵坡线相交的转折处,为了行车平顺用一段曲线来缓和,这条连接两纵坡线的曲线叫竖曲线。) 竖曲线的形状,通常采用平曲线或二次抛物线两种。在设计和计算上为方便一般采用二次抛物线形式。 纵断面上相邻两条纵坡线相交形成转坡点,其相交角用转坡角表示。当竖曲线转坡点在曲线上方时为凸形竖曲线,反之为凹形竖曲线。 一、竖曲线 如图所示,设相邻两纵坡坡度分别为i 1 和i 2,则相邻两坡度的代数差即转坡角为ω= i 1-i 2 ,其中i 1、i 2为本身之值,当上坡时取正值,下坡时取负值。 当 i 1- i 2为正值时,则为凸形竖曲线。当 i 1 - i 2 为负值时,则为凹形竖曲线。 (一)竖曲线基本方程式 我国采用的是二次抛物线形作为竖曲线的常用形式。其基本方程为: Py x 22= 若取抛物线参数P 为竖曲线的半径 R ,则有: Ry x 22 = R x y 22= (二)竖曲线要素计算公式
竖曲线计算图示 1、切线上任意点与竖曲线间的竖距h 通过推导可得: ==PQ h )()(2112li y l x R y y A A q p ---=-R l 22= 2、竖曲线曲线长: L = R ω 3、竖曲线切线长: T= T A =T B ≈ L/2 =2 ωR 4、竖曲线的外距: E =R T 22 ⑤竖曲线上任意点至相应切线的距离:R x y 22= 式中:x —为竖曲任意点至竖曲线起点(终点)的距离, m ; R —为竖曲线的半径,m 。 二、竖曲线的最小半径 (一)竖曲线最小半径的确定 1.凸形竖曲线极限最小半径确定考虑因素 (1)缓和冲击 汽车行驶在竖曲线上时,产生径向离心力,使汽车在凸形竖曲线上重量减小,所以确定竖曲线半径时,对离心力要加以控制。 (2)经行时间不宜过短
第九章公路平曲線與豎曲線之配合 (Combination of Horizontal and Vertical Alinement) 9-1公路線型(Alinement) 公路為配合地形、地貌與土地使用情形,或為減少興建橋梁隧道,減少工程建造費及完工後之維護費,公路路徑無法避免需於平面上有左右彎曲,於縱斷面上有上坡下坡,形成各種線型,另為應行車安全及用路人舒適需要,尚需增設其他線型。 公路線型,依平面及縱斷面區分略如圖9~1。 圖9~1:公路線型 9-2一般考量(General Consideration) 平曲線與豎曲線,係根據研究而得之設計因素。公路設計時應仔細考量平曲
線與豎曲線之配置,否則公路完工後再修正缺陷,徒增困難外並將增加耗費鉅額之改善工程費。例如高速公路之交流道,係屬多層之結構物,控制因素很多且複雜,改善設計誠屬不易,他如行經已開發地區之公路,沿線房地產已成形,改變線型,除增購路權費昂貴外,拆除建物更加困難甚或不可能。 規設公路時,應有生命週期(Life Cycle)之觀念,節省起始之工程費,對該公路之整個生命週期並不見得有利,因僅考量節省工程費,可能造成不良之設計,公路完工通車後公眾意外事件或旅程延誤損失,可能大於節省之工程費,故應仔細衡量。 平曲線與豎曲線係互相影響,不應個別單獨設計。平曲線與豎曲線設計若配合不良,將互相抵銷兩者之優點或強化兩者之缺點。反之,平曲線與豎曲線配合良好,可能不需增加或僅增加少許工程費,即可增進公路效用、促進車速一致,提升交通安全,及改善公路景觀。 9-3 一般之設計控制(General Design Controls)平曲線與豎曲線,係配合地形地貌而設置,並依交通、地下土壤、既有公路、及文化發展、車站設置地點等而調整。 公路設置地點大體決定後,應即研討平曲線與豎曲線之配合,使完成之公路較經濟、美觀,以及對駕駛提供較安全之行車環境。 平曲線與豎曲線之配合,一般控制因素如下: 1. 平曲線之曲率與豎曲線之縱坡應適當平衡。 良好之設計,應為平曲線之曲率與豎曲線之縱坡諧和,方能提供最佳之公路安全、容量、舒適及一致之行車,以及公路景觀。 2. 先考慮豎曲線後考慮平曲線,或先考慮平曲線後考慮豎曲線,並無差別,一 般均可獲良好之配合結果,惟對交通之影響仍應予以分析。 如僅調整豎曲線而未調整平曲線,可能將造成一系列之駝峰現象,對駕駛將造成危險情形,如圖9~2。 駝峰現象,係駕駛僅能看到眼前及遠方之路段,而看不到中間之凹陷路段,除視覺不悅外,因無法看到中間路段,極易發生車禍。
Fx4800公路坐标计算程序 N:Fixm Lb1 0 Z[11]≠0=>Goto S ? {MS} M≦第一个交点所计算最大里程Goto 1? M≦第二个交点所计算最大里程Goto 2?……………………………………………… M≦第N个交点所计算最大里程Goto N? Goto 0 Lb1 A Z[11]=0=>A<0=>P=-1:≠>P=1?A=AbsA? Z=180÷πR Q=0.5L-L^3÷240R^2:T=(R+L^2÷24R)tan0.5A+Q:B=ZL÷2:O=A÷ Z+L:K”E”=(R+L^2÷24R)÷cos0.5A-R:E”ZH”=W-T: Z[1]”HY”=E+L: Z[2]”YH”=E+O-L: Z[3]”HZ”=E+O: Lb1 Z Z[11]≠0=>{MS}? V=0:K=0: M≦E=>D=W-M:C=F+180:H=F:GotoE? M≦Z[1]=>G=M-E:C=F+PZG^2÷6L:H=F+PBG^2÷L^2:I=F-180:Goto B?
M≦Z[2]=>G=M-Z[1]:Goto C ? M≧Z[3]=>D=T+M-Z[3]:C=F+PA:H=C:Goto E? G=Z[3]-M:I=F+PA:C=I-PZG^2÷6L-180:H=I-PBG^2÷L^2 Lb1 B D=√((G-G^5÷40R^2L^2)^2+(G^3÷6RL-G^5÷336R^3L)^2):Goto D Lb1 C U=R(1-cos(B+ZG))+L^2÷24R:J=Rsin(B+ZG)+Q: D=√(U^2+J^2):C=F+Ptan-1(U÷J):H=F+P(B+ZG):I=F-180: Lb1 D V=TcosI:K=TsinI Lb1 E X=Z[8]+DcosC+V:Y=Z[9]+DsinC+K:Z[10] ≠0=>Lb1 F:{DS}:D<0=>V=H+N-180:≠>V=H+N?S<0=>K=H+N-90: ≠>K=H+N+90?Goto G?D=0:N≠90=>S=S÷sinN?S<0=>K=H+N-180: ≠>K=H+N?Lb1 G Z[4]=X+AbsDcosV+AbsScosK◢ Z[5]=Y+AbsDsinV+AbsSsinK◢ Pol(Z[6]-Z[4],Z[7]-Z[5]):J=J+180◢ I=I◢ Z[10]≠0=>Goto F?Z[11] ≠0=>Goto Z?Goto 0 Lb1 1 L=缓和曲线长 R=半径 A=转角(右转正,左转负)
竖曲线计算书 一、 变坡点桩号为220k28+,变坡点标高为m 135.873,两相邻路段的纵坡为 %303.0%0.39921-=+=i i 和,m R 15000=凸。 1. 计算竖曲线的基本要素 竖曲线长度 )(105.3)00303.000399.0(15000m R L =+?==ω 切线长度 )(7.522 3.1052m L T === 外距 )(09.015000 27 .52*7..5222m R T E =?== 2. 求竖曲线的起点和终点桩号 (1) 竖曲线起点桩号:3.167287.522202822028+=-+=-+K K T K 竖曲线起点高程:135.873-52.7 ?0.00399=135.663 (2) 竖曲线终点桩号:7.272287.522202822028+=++=++K K T K 竖曲线终点高程:135.873-52.7?0.00303=135.713 3. 求各桩号标高和竖曲线高程
二、 变坡点桩号为23029+K ,变坡点标高为m 809.132,两相邻路段的纵坡为 %401.0%303.021+=-=i i 和,m R 9000=凹。 1. 计算竖曲线的基本要素 竖曲线长度 )(36.63)]00303.0(00401.0[9000m R L =--?==ω 切线长度 )(68.312 36.632m L T === 外距 )(06.09000 268 .31*68.3122m R T E =?== 2. 求竖曲线的起点和终点桩号 (1) 竖曲线起点桩号:32.1982968.312302923029+=-+=-+K K T K 竖曲线起点高程:132.809+31.68?0.00303=132.905 (2) 竖曲线终点桩号:68.2612968.312302923029+=++=++K K T K 竖曲线终点高程:132.809+31.68?0.00401=132.936 3. 求各桩号标高和竖曲线高程
竖曲线自动计算表格 篇一:Excel竖曲线计算 利用Excel表格进行全线线路竖曲线的统一计算 高速公路纵断面线型比较复杂,竖曲线数量比较多。由于相当多的竖曲线分段造成了设计高程计算的相对困难,为了方便直接根据里程桩号计算设计高程,遂编制此计算程序。程序原理: 1、根据设计图建立竖曲线参数库; 2、根据输入里程智能判断该里程位于何段竖曲线上; 3、根据得到的竖曲线分段标志调取该分段的曲线参数到计算表格中; 4、把各曲线参数带入公式进行竖曲线高程的计算; 5、对程序进<0 = J=0; M-P=0 = J=1 B: K<=D =B=-M ; KD = B=P 程序特色: 1、可以无限添加竖曲线,竖曲线数据库不限制竖曲线条数; 2、直接输入里程就可以计算设计高程,不需考虑该里程所处的竖曲线分段;
3、对计算公式进行保护,表格中不显示公式,不会导致公式被错误修改或恶意编辑。 程序的具体编制步骤: 1、新建Excel工作薄,对第一第二工作表重新命名为“参数库”和“计算程序”,根据设计图建立本标段线路竖曲线的参数库,需要以下条目: (1)、竖曲线编号; (2)、竖曲线的前后坡度(I1、I2)不需要把坡度转换为小数; (3)、竖曲线半径、切线长(不需要考虑是凸型或凹型);(4)、竖曲线交点里程、交点高程; (5)、竖曲线起点里程、终点里程(终点里程不是必要参数,只作为复核检测用);如图1所示: 图1 2、进行计算准备: (1)、根据输入里程判断该里程所处的曲线编号: 需要使用lookup函数,函数公式为“LOOKUP(A2,参数库!H3:H25,参数库!A3:A25)”。如图2所示: 里程为K15+631的桩号位于第11个编号的竖曲线处,可以参照图1 进行对照 (2)、在工作表“程序计算”中对应“参数库”相应的格式建立表格
第8讲 课 题:第三节 竖曲线 第四节 公路平、纵线形组合设计 教学内容:理解竖曲线最小半径的确定;能正确设置竖曲线;掌握竖曲线的要素计算、竖曲线与路基设计标高的计算;能正确进行平、纵线形的组合设计。 重 点:1、竖曲线最小半径与最小长度的确定;2、竖曲线的设置; 3、平、纵线形的组合设计。 难 点:竖曲线与路基设计标高的计算;平、纵线形的组合设计。 第三节 竖曲线设计 纵断面上相邻两条纵坡线相交的转折处,为了行车平顺用一段曲线来缓和,这条连接两纵坡线的曲线叫竖曲线。 竖曲线的形状,通常采用平曲线或二次抛物线两种。在设计和计算上为方便一般采用二次抛物线形式。 纵断面上相邻两条纵坡线相交形成转坡点,其相交角用转坡角表示。当竖曲线转坡点在曲线上方时为凸形竖曲线,反之为凹形竖曲线。 一、竖曲线 如图所示,设相邻两纵坡坡度分别为i 1 和i 2,则相邻两坡度的代数差即转坡角为ω= i 1-i 2 ,其中i 1、i 2为本身之值,当上坡时取正值,下坡时取负值。 当 i 1- i 2为正值时,则为凸形竖曲线。当 i 1 - i 2 为负值时,则为凹形竖曲线。 (一)竖曲线基本方程式 我国采用的是二次抛物线形作为竖曲线的常用形式。其基本方程为: Py x 22= 若取抛物线参数P 为竖曲线的半径 R ,则有: Ry x 22 = R x y 22 = (二)竖曲线要素计算公式
竖曲线计算图示 1、切线上任意点与竖曲线间的竖距h 通过推导可得: ==PQ h )()(2112 li y l x R y y A A q p ---=-R l 22= 2、竖曲线曲线长: L = R ω 3、竖曲线切线长: T= T A =T B ≈ L/2 = 2 ω R 4、竖曲线的外距: E =R T 22 ⑤竖曲线上任意点至相应切线的距离:R x y 22 = 式中:x —为竖曲任意点至竖曲线起点(终点)的距离, m ; R —为竖曲线的半径,m 。 二、竖曲线的最小半径 (一)竖曲线最小半径的确定 1.凸形竖曲线极限最小半径确定考虑因素 (1)缓和冲击 汽车行驶在竖曲线上时,产生径向离心力,使汽车在凸形竖曲线上重量减小,所以确定竖曲线半径时,对离心力要加以控制。 (2)经行时间不宜过短 当竖曲线两端直线坡段的坡度差很小时,即使竖曲线半径较大,竖曲线长度也有可能较短,此时汽车在竖曲线段倏忽而过,冲击增大,乘客不适;从视觉上考虑也会感到线形突然
课 题:第三节 竖曲线 第四节 公路平、纵线形组合设计 教学内容:理解竖曲线最小半径的确定;能正确设置竖曲线;掌握竖曲线的要素计算、竖曲线与路基设计标高的计算;能正确进行平、纵线形的组合设计。 重 点:1、竖曲线最小半径与最小长度的确定;2、竖曲线的设置; 3、平、纵线形的组合设计。 难 点:竖曲线与路基设计标高的计算;平、纵线形的组合设计。 第三节 竖曲线设计 纵断面上相邻两条纵坡线相交的转折处,为了行车平顺用一段曲线来缓和,这条连接两纵坡线的曲线叫竖曲线。 竖曲线的形状,通常采用平曲线或二次抛物线两种。在设计和计算上为方便一般采用二次抛物线形式。 纵断面上相邻两条纵坡线相交形成转坡点,其相交角用转坡角表示。当竖曲线转坡点在曲线上方时为凸形竖曲线,反之为凹形竖曲线。 一、竖曲线 如图所示,设相邻两纵坡坡度分别为i 1 和i 2,则相邻两坡度的代数差即转坡角为ω= i 1-i 2 ,其中i 1、i 2为本身之值,当上坡时取正值,下坡时取负值。 当 i 1- i 2为正值时,则为凸形竖曲线。当 i 1 - i 2 为负值时,则为凹形竖曲线。 (一)竖曲线基本方程式 我国采用的是二次抛物线形作为竖曲线的常用形式。其基本方程为: Py x 22= 若取抛物线参数P 为竖曲线的半径 R ,则有: Ry x 22 = R x y 22 = (二)竖曲线要素计算公式 竖曲线计算图示 1、切线上任意点与竖曲线间的竖距h 通过推导可得: ==PQ h )()(2112 li y l x R y y A A q p ---=-R l 22= 2、竖曲线曲线长: L = R ω 3、竖曲线切线长: T= T A =T B ≈ L/2 = 2 ω R 4、竖曲线的外距: E =R T 22 ⑤竖曲线上任意点至相应切线的距离:R x y 22 = 式中:x —为竖曲任意点至竖曲线起点(终点)的距离, m ; R —为竖曲线的半径,m 。
如图8-5所示,如果我们把竖立在B点上视距尺得尺间隔MN,化算成与视线相垂直得尺间隔M′N′,就可用式(8-2)计算出倾斜距离L。然后再根据L与垂直角α,算出水平距离D与高差h。 图8-5 视线倾斜时得视距测量原理 从图8-5可知,在△EM′M与△EN′N中,由于φ角很小(约34′),可把∠EM′M与∠EN′N视为直角。而∠MEM′
=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就就是假设视距尺与视线相垂直得尺间隔l ′,MN 就是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间得水平距离为: αα2 cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离得计算公式。 由图8-5可以瞧出,A 、B 两点间得高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 21 sin cos sin Kl Kl L h ===' (8-5)
所以 1 =α2 sin + v h- i Kl 2 (8-6) 式(8-6)为视线倾斜时高差得计算公式。 二、视距测量得施测与计算 1.视距测量得施测 (1)如图8-5所示,在A点安置经纬仪,量取仪器高i,在B点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。 (4)根据尺间隔l、垂直角α、仪器高i及中丝读数v,计算水平距离D与高差h。 2.视距测量得计算
浅谈公路设计中的平、纵线形组合 摘要:本文对在实际公路设计中平、纵断面线形结合时应该遵循和注意的问题进行了探讨,以供参考。 关键词:公路,线型组合,设计原则 前言 在公路设计中,平、纵断面是极为重要的组成部分。平、纵断面线形配合不好,不但有碍于行车舒适等优点的发挥,而且会加剧视觉不良,造成行车上的危险。平、纵断面线形的组合设计很好的配合,通常无须增加造价就能提高公路的品质,安全和完美线形,并有助于保持连续、匀速行驶。 1 平纵线形组合设计原则 ( 1) 应在视觉上能自然地引导驾驶员的视线,并保持视觉的连续性。任何使驾驶员感到茫然、迷惑或判断失误的线形,都必须尽力避免。在视觉上能否自然地诱导视线,是衡量平纵线形组合的最基本问题。 ( 2) 注意保持平纵线形的技术指标大小应均衡。它不仅影响线形的平顺性,而且与工程费用相关。对纵段面线形反复起伏、在平面上却采用高标准的线形是无意义的,反之亦然。 ( 3) 选择组合得当的合成坡度,以利于路面排水和行车安全。 ( 4) 注意与公路周围环境的配合。它可以减轻驾驶员的疲劳和紧张程度,并可起到引导视线的作用。 2 平纵线形组合方式及注意问题 2. 1 平面直线与纵断面直线组合
线形单调、枯燥,在行车过程中视景无变化,容易使司机产生疲劳和超车频繁,在组合时一般应避免这种情况。但在交通比较错综复杂的路段( 如交叉口) ,采用这种线形要素是 有利的。 为调节单调的视觉,增进视线诱导,设计时可用划行车道线、标志、绿化、注意与路旁建筑设施配合等方法来弥补。 2. 2 平面直线与纵段面凹形竖曲线组合 直线具有较好的视距条件,由于纵断面上插入了凹形竖曲线,因此线形不再生硬、呆板,而且给予司机以动的视觉印象,提高了行车的舒适性。但是要注意以下三点: ( 1) 避免采用较短的凹形竖曲线( 一般以大于最小竖曲线半径的3 - 4 倍为宜) ,以避免产生折点。 ( 2) 在两个凹形竖曲线间注意不要插入短直线。若能将两凹形竖曲线合二为一,则会具有更佳的视觉和行车效果。 ( 3) 长直线的末端不宜插入小半径凹形竖曲线。 2. 3 平面直线与纵断面凸形竖曲线组合 线形视距条件差,线形单调,应尽量避免。注意要采用较大的竖曲线半径,以保证有较好的视距。纵断面线形的优劣很大程度上取决于竖曲线半径的大小,竖曲线半径大小的选择 应满足视距要求,且竖曲线长度不宜过短。一般情况下,凸形曲线段事故率要比水平段高,小半径凸形曲线往往成为事故的诱因。竖曲线频繁变换会影响行车视距,严重降低公路安
如图8-5所示,如果我们把竖立在B点上视距尺的尺间隔MN,化算成与视线相垂直的尺间隔M′N′,就可用式(8-2)计算出倾斜距离L。然后再根据L和垂直角α,算出水平距离D和高差h。 图8-5 视线倾斜时的视距测量原理 从图8-5可知,在△EM′M和△EN′N中,由于φ角很小(约34′),可把∠EM′M和∠EN′N视为直角。
而∠MEM ′=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就是假设视距尺与视线相垂直的尺间隔l ′,MN 是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间的水平距离为: αα2 cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离的计算公式。 由图8-5可以看出,A 、B 两点间的高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 21 sin cos sin Kl Kl L h ==='
(8-5) 所以 1 sin v i =α2 + h- Kl 2 (8-6) 式(8-6)为视线倾斜时高差的计算公式。 二、视距测量的施测与计算 1.视距测量的施测 (1)如图8-5所示,在A点安置经纬仪,量取仪器高i,在B点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B 点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。
公路竖曲线计算
————————————————————————————————作者:————————————————————————————————日期:
课 题:第三节 竖曲线 第四节 公路平、纵线形组合设计 教学内容:理解竖曲线最小半径的确定;能正确设置竖曲线;掌握竖曲线的要素计算、竖曲线与路基设计标高的计算;能正确进行平、纵线形的组合设计。 重 点:1、竖曲线最小半径与最小长度的确定;2、竖曲线的设置; 3、平、纵线形的组合设计。 难 点:竖曲线与路基设计标高的计算;平、纵线形的组合设计。 第三节 竖曲线设计 纵断面上相邻两条纵坡线相交的转折处,为了行车平顺用一段曲线来缓和,这条连接两纵坡线的曲线叫竖曲线。 竖曲线的形状,通常采用平曲线或二次抛物线两种。在设计和计算上为方便一般采用二次抛物线形式。 纵断面上相邻两条纵坡线相交形成转坡点,其相交角用转坡角表示。当竖曲线转坡点在曲线上方时为凸形竖曲线,反之为凹形竖曲线。 一、竖曲线 如图所示,设相邻两纵坡坡度分别为i 1 和i 2,则相邻两坡度的代数差即转坡角为ω= i 1-i 2 ,其中i 1、i 2为本身之值,当上坡时取正值,下坡时取负值。 当 i 1- i 2为正值时,则为凸形竖曲线。当 i 1 - i 2 为负值时,则为凹形竖曲线。 (一)竖曲线基本方程式 我国采用的是二次抛物线形作为竖曲线的常用形式。其基本方程为: Py x 22= 若取抛物线参数P 为竖曲线的半径 R ,则有: Ry x 22 = R x y 22 = (二)竖曲线要素计算公式 竖曲线计算图示 1、切线上任意点与竖曲线间的竖距h 通过推导可得: ==PQ h )()(2112 li y l x R y y A A q p ---=-R l 22= 2、竖曲线曲线长: L = R ω 3、竖曲线切线长: T= T A =T B ≈ L/2 = 2 ω R 4、竖曲线的外距: E =R T 22 ⑤竖曲线上任意点至相应切线的距离:R x y 22 = 式中:x —为竖曲任意点至竖曲线起点(终点)的距离, m; R —为竖曲线的半径,m 。
平曲线视距横净距的计 算 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
平曲线视距横净距 的计算 发表人:王乃坤江树华 单位:龙建路桥股份有限公司第二工程处 日期:二OO四年十二月十五三十日 平曲线视距横净距的计算 王乃坤江树华 (龙建路桥股份有限公司第二工程处) 提要:本文介绍用计算机计算平曲线及相邻直线段上任一点的横净距的方 法。 关键词:平曲线横净距计算机计算 Calculating about the Cross Clearance Distance of Horizontal Curve Stadia WANG Nai-kun JIANG Shu-hua QU Zhi-cheng Abstract:Calculating method of horizontal curve and crossclearance distance with computer is presented. Key words:Horizontal curve Cross clearance distance Computer 1 前言 如何准确计算平曲线及相邻直线段上任一点的横净距,是我们工程技术人员在 实际工作中常遇到的问题。近期我们成功地利用计算机程序解决了带缓和曲线的平 曲线横净距计算,省时省力,起到了事半功倍的效果。现介绍如下,仅供参考。 2 横净距的计算方法 计算原理 如图1所示,某交点转角为α,平曲线半径为R1,缓和曲线长为Ls1(我们将圆曲线作为 Ls1=0的特例处理)。若行车道宽度为b,则计算横净距时的行车轨迹线(距未加宽时的行车道内侧边缘,图中虚曲线所示)与路中线的径向间距△R=b/2-。M为平曲线和相邻直线段上的 任一点,M所在断面的横净距可按下法计算:在M点的法线MN两侧的行车轨迹线上分别找一点A、B,使A、B两点间沿行车轨迹线的长度等于设计视距S,计算AB连线与MN的交点E到M点 的距离值H;保持A、B两点间沿行车轨迹线的长度不变,使A、B两点沿行车轨迹线同步移动时,H值也随之改变,最大的H值与△R之差即为M点的横净距。
第二节 竖曲线设计 纵断面上相邻两条纵坡线相交的转折处,为了行车平顺用一段曲线来缓和,这条连接两纵坡线的曲线叫竖曲线。 竖曲线的形状,通常采用平曲线或二次抛物线两种。在设计和计算上为方便一般采用二次抛物线形式。 纵断面上相邻两条纵坡线相交形成转坡点,其相交角用转坡角表示。当竖曲线转坡点在曲线上方时为凸形竖曲线,反之为凹形竖曲线。 一、竖曲线 如图所示,设相邻两纵坡坡度分别为i 1 和i 2,则相邻两坡度的代数差即转坡角为ω= i 1-i 2 ,其中i 1、i 2为本身之值,当上坡时取正值,下坡时取负值。 当 i 1- i 2为正值时,则为凸形竖曲线。当 i 1 - i 2 为负值时,则为凹形竖曲线。 (一)竖曲线基本方程式 我国采用的是二次抛物线形作为竖曲线的常用形式。其基本方程为: Py x 22= 若取抛物线参数P 为竖曲线的半径 R ,则有: Ry x 22 = R x y 22= (二)竖曲线要素计算公式 竖曲线计算图示 1、切线上任意点与竖曲线间的竖距h 通过推导可得: ==PQ h )()(2112 li y l x R y y A A q p ---=-R l 22= 2、竖曲线曲线长: L = R ω
3、竖曲线切线长: T= T A =T B ≈ L/2 = 2 ω R 4、竖曲线的外距: E =R T 22 ⑤竖曲线上任意点至相应切线的距离:R x y 22 = 式中:x —为竖曲任意点至竖曲线起点(终点)的距离, m ; R —为竖曲线的半径,m 。 二、竖曲线的最小半径 (一)竖曲线最小半径的确定 1.凸形竖曲线极限最小半径确定考虑因素 (1)缓和冲击 汽车行驶在竖曲线上时,产生径向离心力,使汽车在凸形竖曲线上重量减小,所以确定竖曲线半径时,对离心力要加以控制。 (2)经行时间不宜过短 当竖曲线两端直线坡段的坡度差很小时,即使竖曲线半径较大,竖曲线长度也有可能较短,此时汽车在竖曲线段倏忽而过,冲击增大,乘客不适;从视觉上考虑也会感到线形突然转折。因此,汽车在凸形竖曲线上行驶的时间不能太短,通常控制汽车在凸形竖曲线上行驶时间不得小于3秒钟。 (3)满足视距的要求 汽车行驶在凸形竖曲线上,如果竖曲线半径太小,会阻挡司机的视线。为了行车安全,对凸形竖曲线的最小半径和最小长度应加以限制。 2.凹形竖曲线极限最小半径确定考虑因素 (1)缓和冲击: 在凹形竖曲线上行驶重量增大;半径越小,离心力越大;当重量变化程度达到一定时,就会影响到旅客的舒适性,同时也会影响到汽车的悬挂系统。 (2)前灯照射距离要求 对地形起伏较大地区的路段,在夜间行车时,若半径过小,前灯照射距离过短,影响行车安 全和速度;在高速公路及城市道路上有许多跨线桥、门式交通标志及广告宣传牌等,如果它们正好处在凹形竖曲线上方,也会影响驾驶员的视线。 (3)跨线桥下视距要求 为保证汽车穿过跨线桥时有足够的视距,汽车行驶在凹形竖曲线上时,应对竖曲线最小半径加以限制。
第三节竖曲线 纵断面上两个坡段的转折处,为方便行车,用一段曲线来缓和,称为竖曲线。可采用抛物线或圆曲线。 一、竖曲线要素的计算公式 相邻坡段的坡度为i1和i2,代数差为ω=i2 -i1 ω为正时,是凹曲线;ω为负,是凸曲线。 2.竖曲线诸要素计算公式 竖曲线长度或竖曲线半径R: (前提:ω很小) L=Rω 竖曲线切线长:T=L/2=Rω/2 竖曲线上任一点竖距h: 竖曲线外距:
例题4-3 ω=-0.09 凸形; L=Rω=2000*0.09=180m T=L/2=90m E=T2/2R=2.03m 起点桩号=k5+030 - T =K4+940 起始高程=427.68 - 5%*90=423.18m 桩号k5+000处: x1=k5+000-k4+940=60m 切线高程=423.18+60*0.05=426.18m h1=x21/2R=602/2*2000=0.90m 设计高程=426.18 - 0.90=425.28m 桩号k5+100处: x2=k5+100-k4+940=160m 切线高程=423.18+160*0.05=431.18m h2=x22/2R=1602/2*2000=40米m 设计高程=431.18 - 6.40=424.78m
1、在桩号k1+575处,引黄渠提水站一级动力电缆埋设电缆一趟。其工程做法为: 采用3*16加1加k电缆,长70米;外套2寸塑料管70米;现浇C20砼包封30*30cm。两端接头设1000mm砖砌检查井,井壁厚240mm,钢筋砼圈盖两套。 2、根据运城市规划设计院《关于振西大街设计变更申请的答复意见》第4条,经与建设单 位,当地村委会协商,分别在k0+150,k0+320,k0+930四处增设灌渠倒虹吸管,工程做法为:DN600钢筋砼承插口管,橡胶胶圈接口,长54米,四周C20砼封包,厚度30cm,进出水口井为1000cm,深4.1米,收口70cm圆形井,加盖钢筋砼圈盖各一套,内外1:2水泥砂浆抹面,四周3:7灰土夯填,引渠长40米,(梯形(45+30)*40/2cm,现浇砼厚5cm);C20现浇砼澄泥池70*70*70cm,壁厚20cm。 3、在两条路的交汇口处W37#检查井,不在清单以内,我项目部已施做,其内径为1250mm, 井高6.5 米(其中井室高为5.9米,井筒高0.6米),1650mm钢筋砼井口盖板1块,钢筋砼圈盖1套。