
电路仿真实验报告 实验一直流电路工作点分析和直流扫描分析 一、实验目的 (1)学习使用Pspice软件,熟悉它的工作流程,即绘制电路图、元件类别的选择及其参数的赋值、分析类型的建立及其参数的设置、Probe窗口的设置和分析的运行过程等。 (2)学习使用Pspice进行直流工作点的分析和直流扫描的操作步骤。 二、原理与说明 对于电阻电路,可以用直观法列些电路方程,求解电路中各个电压和电流。Pspice软件是采用节点电压法对电路进行分析的。 使用Pspice软件进行电路的计算机辅助分析时,首先编辑电路,用Pspice的元件符号库绘制电路图并进行编辑。存盘。然后调用分析模块、选择分析类型,就可以“自动”进行电路分析了。 三、实验示例 1、利用Pspice绘制电路图如下 2、仿真 (1)点击Psipce/New Simulation Profile,输入名称; (2)在弹出的窗口中Basic Point是默认选中,必须进行分析的。点击确定。 (3)点击Pspice/Run(快捷键F11)或工具栏相应按钮。 (4)如原理图无错误,则显示Pspice A/D窗口。
(5)在原理图窗口中点击V,I工具栏按钮,图形显示各节点电压和各元件电流值如下。 四、选做实验 1、直流工作点分析,即求各节点电压和各元件电压和电流。 2、直流扫描分析,即当电压源的电压在0-12V之间变化时,求负载电阻R l中电流虽电压源的变化
曲线。 曲线如图: 直流扫描分析的输出波形3、数据输出为: V_Vs1 I(V_PRINT1) 0.000E+00 1.400E+00 1.000E+00 1.500E+00 2.000E+00 1.600E+00 3.000E+00 1.700E+00 4.000E+00 1.800E+00 5.000E+00 1.900E+00 6.000E+00 2.000E+00 7.000E+00 2.100E+00 8.000E+00 2.200E+00 9.000E+00 2.300E+00 1.000E+01 2.400E+00 1.100E+01 2.500E+00 1.200E+01 2.600E+00
磁悬浮列车主要由悬浮系统、推进系统和导向系统三大部分组成,见图3。尽管可以使用与磁力无关的推进系统,但在目前的绝大部分设计中,这三部分的功能均由磁力来完成。下面分别对这三部分所采用的技术进行介绍。 悬浮系统:目前悬浮系统的设计,可以分为两个方向,分别是德国所采用的常导型和日本所采用的超导型。从悬浮技术上讲就是电磁悬浮系统(EMS)和电力悬浮系统(EDS)。图4给出了两种系统的结构差别。 电磁悬浮系统(EMS)是一种吸力悬浮系统,是结合在机车上的电磁铁和导轨上的铁磁轨道相互吸引产生悬浮。常导磁悬浮列车工作时,首先调整车辆下部的悬浮和导向电磁铁的电磁吸力,与地面轨道两侧的绕组发生磁铁反作用将列车浮起。在车辆下部的导向电磁铁与轨道磁铁的反作用下,使车轮与轨道保持一定的侧向距离,实现轮轨在水平方向和垂直方向的无接触支撑和无接触导向。车辆与行车轨道之间的悬浮间隙为10毫米,是通过一套高精度电子调整系统得以保证的。此外由于悬浮和导向实际上与列车运行速度无关,所以即使在停车状态下列车仍然可以进入悬浮状态。 电力悬浮系统(EDS)将磁铁使用在运动的机车上以在导轨上产生电流。由于机车和导轨的缝隙减少时电磁斥力会增大,从而产生的电磁斥力提供了稳定的机车的支撑和导向。然而机车必须安装类似车轮一样的装置对机车在“起飞”和“着陆”时进行有效支撑,这是因为EDS在机车速度低于大约25英里/小时无法保证悬浮。EDS系统在低温超导技术下得到了更大的发展。 超导磁悬浮列车的最主要特征就是其超导元件在相当低的温度下所具有的完全导电性和完全抗磁性。超导磁铁是由超导材料制成的超导线圈构成,它不仅电流阻力为零,而且可以传导普通导线根本无法比拟的强大电流,这种特性使其能够制成体积小功率强大的电磁铁。
一、对实习目的认识 ERP模拟实习(实验)是在学生学习《生产运作管理》等相关课程的基础上,为使学生加深对理论教学的理解,配合教学内容所开设的实验教学环节。通过对与企业主要业务有关的各子系统的认知与操作,使学生了解ERP系统的基本构成与操作方法,能够增强学生计算机的应用能力,培养学生分析问题与解决问题的能力,有利于对理论教学内容的消化与吸收,并为今后从事实际工作打下一定的基础。 本实习是以广州五羊-本田公司某个月份的实际主要业务为基础,通过模拟实习,使学生在参与营销、技术、采购、设备、生产、品质、仓库、财务、人事等各个环节的实际操作过程中,熟悉各职能部门是怎样独立运作,部门之间是怎样相互协调关系。把企业作为整体系统适应外部环境变化的条件,应该如何有效地进行现代企业管理的运作。为便于实习,对每一个功能模块操作,提出较为具体的要求: 通过基础数据模块的实习,理解基础数据在企业管理中的作用。 通过营销管理模块的实习,掌握销售合同的签定,按客户订单组织生产的一般流程,掌握客户管理的基本内容与要求,了解售后服务的主要业务,明确营销管理在企业管理中的重要地位。 通过生产管理模块的实习,掌握生产计划的制定方法,以及按生产计划组织生产过程的一般流程,了解物料清单和物料需求计划的基本内容。 通过采购管理模块的实习,掌握物料采购的一般流程;理解物料供应的基本要求。 通过仓库管理模块的实习,掌握库存管理的一般流程,了解库存控制的方法。 通过品质管理模块的实习,理解品质管理的体系包括品质的控制、品质保证、品质工程三个重要组成部分的基本要求;掌握物料、产品质检的一般流程;了解质检技术标准。 通过财务管理模块的实习,掌握应收款和应付款业务处理流程;掌握成本核算的内容及要求;掌握财务成果核算的要点,了解资金筹备和运用的价值分析。 学生通过以上模块的实习,能够了解现代企业管理的一般流程,并能整合所学的管理理论知识,掌握现代企业管理的实用工具与方法,成为企业所需要的实用管理人才。 二、对《企业管理教学模拟实习软件》的整体设计思想的认识 现代企业管理教学模拟实习多媒体教学系统分为“实习目的、企业背景简介、企业流程介绍、模拟实习”四个部分;在模拟实习部分中包括十三个功能模块,每个模块都配有详细的操作说明以及相应的理论知识同时提供了完整的在线帮助、数据导入、数据流程图和教学案例等;完全模拟一个大型企业整体运作过程,学生可自行设计数据进行教学与实习,使教学与实习更贴近于实际。 我们通过对企业管理教学系统的操作学习,学生能够充分体验到企业在以销定产经营模式中,销售定单的变动将引起生产计划、物料分解、采购计划、库存管理、质量管理及相应的财务、设备、人事等各个环节的变化,反映出整个系统
磁悬浮列车技术 苏州科技学院天平学院陈耀1330117102 【摘要】:磁悬浮列车是一种靠磁悬浮力(即磁的吸力和排斥力)来推动的列车。由于其轨道的磁力使之悬浮在空中,行走时不需接触地面,因此其阻力只有空气的阻力。磁悬浮技术的研究源于德国,早在1922年德国工程师赫尔曼·肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本等发达国家相继开始筹划进行磁悬浮运输系统的开发。磁悬浮列车是一种采用无接触的电磁悬浮、导向和驱动系统的磁悬浮高速列车系统。不同于传统列车利用车轮与钢轨之间的粘着力使列车前进。磁悬浮列车运行时与轨道保持10mm或者100mm的间隙,从根本上克服了传统列车轮轨黏着限制、机械噪声和磨损等问题,是一种新型的运载工具,其时速远远超过传动列车。 【关键词】:悬浮、推进、导向、创新 【正文】 一、工作原理 磁悬浮列车利用电磁体“同名磁极相互排斥,异名磁极相互吸引”的原理,让磁铁具有抗拒地心引力的能力,使车体完全脱离轨道,悬浮在距离轨道约1厘米处,腾空行驶,创造了近乎“零高度”空间飞行的奇迹磁悬浮列车主要由悬浮系统、推进系统和导向系统三大部分组成,尽管可以使用与磁力无关的推进系统,但在目前的绝大部分设计中,这三部分的功能均由磁力来完成。下面分别对这三分所采用的技术进行介绍。 导向系统
导向系统是一种测向力来保证悬浮的机车能够沿着导轨的方向运动。必要的推力与悬浮力相类似,也可以分为引力和斥力。在机车底板上的同一块电磁铁可以同时为导向系统和悬浮系统提供动力,也可以采用独立的导向系统电磁铁。悬浮系统 目前悬浮系统的设计,可以分为两个方向,分别是德国所采用的常导型和日本所采用的超导型。从悬浮技术上讲就是电磁悬浮系统(EMS)和电力悬浮系统(EDS)。图4给出了两种系统的结构差别。(EMS)是一种吸力悬浮系统,是结合在机车上的电磁铁和导轨上的铁磁轨道相互排斥产生悬浮。常导磁悬浮列车工作时,首先调整车辆下部的悬浮和导向电磁铁的电磁排斥力,与地面轨道两侧的绕组发生磁铁反作用将列车浮起。在车辆下部的导向电磁铁与轨道磁铁的反作用下,使车轮与轨道保持一定的侧向距离,实现轮轨在水平方向和垂直方向的无接触支撑和无接触导向。车辆与行车轨道之间的悬浮间隙为10毫米,是通过一套高精度电子调整系统得以保证的。此外由于悬浮和导向实际上与列车运行速度无关,所以即使在停车状态下列车仍然可以进入悬浮状态。(EDS)将磁铁使用在运动的机车上以在导轨上产生电流。由于机车和导轨的缝隙减少时电磁斥力会增大,从而产生的电磁斥力提供了稳定的机车的支撑和导向。然而机车必须安装类似车轮一样的装置对机车在“起飞”和“着陆”时进行有效支撑,这是因为EDS在机车速度低于大约25英里/小时无法保证悬浮。EDS系统在低温超导技术下得到了更大的发展。超导磁悬浮列车的最主要特征就是其超导元件在相当低的温度下所具有的完全导电性和完全抗磁性。超导磁铁是由超导材料制成的超导线圈构成,它不仅电流阻力为零,而且可以传导普通导线根本无法比拟的强大电流,这种特性使其能够制成体积小功率强大的电磁铁。
实验七 基于Simulink 的简单电力系统仿真实验 一. 实验目的 1) 熟悉Simulink 的工作环境及SimPowerSystems 功能模块库; 2) 掌握Simulink 的的powergui 模块的应用; 3) 掌握发电机的工作原理及稳态电力系统的计算方法; 4)掌握开关电源的工作原理及其工作特点; 5)掌握PID 控制对系统输出特性的影响。 二.实验内容与要求 单机无穷大电力系统如图7-1所示。平衡节点电压0 44030 V V =∠? 。负荷功率10L P kW =。线路参数:电阻1l R =Ω;电感0.01l L H =。发电机额定参数:额定功率100n P kW =;额定电压440 3 n V V =;额定励磁电流 70 fn i A =;额定频率50n f Hz =。发电机定子侧参数:0.26s R =Ω, 1 1.14 L mH =,13.7 md L mH =,11 mq L mH =。发电机转子侧参数:0.13f R =Ω,1 2.1 fd L mH =。发电机阻尼绕组参数:0.0224kd R =Ω, 1 1.4 kd L mH =,10.02kq R =Ω,11 1 kq L mH =。发电机转动惯量和极对数分别 为224.9 J kgm =和2p =。发电机输出功率050 e P kW =时,系统运行达到稳态状态。在发电机输出电磁功率分别为170 e P kW =和2100 e P kW =时,分析发电机、平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。
G 发电机节点 V 负 荷 l R l L L P 图 7.1 单机无穷大系统结构图 输电线路 三.实验步骤 1. 建立系统仿真模型 同步电机模块有2个输入端子、1个输出端子和3个电气连接端子。模块的第1个输入端子(Pm)为电机的机械功率。当机械功率为正时,表示同步电机运行方式为发电机模式;当机械功率为负时,表示同步电机运行方式为电动机模式。在发电机模式下,输入可以是一个正的常数,也可以是一个函数或者是原动机模块的输出;在电动机模式下,输入通常是一个负的常数或者是函数。模块的第2个输入端子(Vf)是励磁电压,在发电机模式下可以由励磁模块提供,在电动机模式下为一个常数。 在Simulink仿真环境中打开Simulink库,找出相应的单元部件模型,构造仿真模型,三相电压源幅值为4403,频率为50Hz。按图连接好线路,设置参数,建立其仿真模型,仿真时间为5s,仿真方法为ode23tb,并对各个单元部件模型的参数进行修改,如图所示。
磁浮列车原理principle of maglev 1.磁浮列车是一个系统。在该系统中,车辆利用车载超导磁铁和地面线圈之间产生的电磁 吸力或斥力从导轨(相当于传统铁路的轨道)上浮升起来。 Maglev is a system in which the vehicle runs levitated from the guideway (corresponding to the rail tracks of conventional railways) by using electromagnetic forces between superconducting magnets on board the vehicle and coils on the ground. 2.与传统的轮轨铁路不同,磁浮列车主要是依靠无接触的电磁力、而非机械力来实现支承、 导向、加速和制动功能。 Different from conventional wheel-on-rail system, the Transrapid accomplishes the functions of support, guidance, acceleration and braking by using non-contact electromagnetic instead of mechanical force. 3.由于列车运行中几乎没有机械接触,因而运行起来噪声较小,时速却可高达500公里。 Because there is almost no mechanical contact Transrapid can run with lower noise, but relatively higher speed up to 500 km/h. 4.磁悬浮系统依靠列车上的电磁铁和导轨中的磁铁定子之间的吸力工作。 The magnetic levitation system is based on the power of attraction between the electromagnets in the vehicle and the ferromagnetic stator packs in the guideway. 5.跟传统列车不同,磁浮列车的驱动系统不安装在车辆上,而是在导向轨中。 In contrast to the conventional trains, the propulsion system for the Transrapid is not mounted in the vehicle but in the guideway. 6.导轨上的长定子线性电机被分成区段,各区段均有独立开关,只有列车通过该区段时才 有电力供应。 The long-stator linear motor in the guideway is divided into segments which are individually switched on and off, with power only being supplied to the given segments as the train passes. 7.电子控制的磁浮磁铁贯穿车辆的两侧,这些磁铁使车辆被吸往安装在导轨下放的磁铁定 子元件。 Electronically controlled support magnets located on both sides along the entire length of the vehicle pull up to the ferromagnetic stator packs mounted to the underside of the guideway. 8.贯穿车辆两侧的导轨磁铁使车辆水平悬浮在轨道上。 Guidance magnets located on both sides along the entire length of the vehicle keep the vehicle laterally on the track. 9.电子系统可确保空隙恒定(即10毫米)。 Electronic systems guarantee that the clearance remains constant (nominally 10 mm). 10.列车浮升所需功量低于车辆空调设施所需。 To hover, the maglev requires less power than its air conditioning equipment. 11.悬浮系统由车载电池馈电,因而与驱动系统无关。 The levitation system is supplied from on-board batteries and thus independent of the propulsion system. 12.在没有外部能量输入的情况下,车辆也能悬浮达30分钟之久。而在运行过程中,车载 电池可由配备于悬浮磁铁中的线性发电机充电。 The vehicle is capable of hovering up to 30 minutes without external energy. While travelling, the on-board batteries are recharged by linear generators integrated into the support
五邑大学 电力系统分析理论 实验报告 院系 专业 学号 学生姓名 指导教师
实验一仿真软件的初步认识 一、实验目的: 通过使用PowerWorld电力系统仿真软件,掌握电力系统的结构组成,了解电力系统的主要参数,并且学会了建立一个简单的电力系统模型。学会单线图的快捷菜单、文件菜单、编辑菜单、插入菜单、格式菜单、窗口菜单、仿真控制等菜单的使用。 二、实验内容: (一)熟悉PowerWorld电力系统仿真软件的基本操作 (二)用仿真器建立一个简单的电力系统模型: 1、画一条母线,一台发电机; 2、画一条带负荷的母线,添加负荷; 3、画一条输电线,放置断路器; 4、写上标题和母线、线路注释; 5、样程存盘; 6、对样程进行设定、求解; 7、加入一个新的地区。 三、电力系统模型: 按照实验指导书,利用PowerWorld软件进行建模,模型如下: 四、心得体会: 这一次试验是我第一次接触PWS这个软件,刚开始面对一个完全陌生的软件,我只能听着老师讲解,照着试验说明书,按试验要求,在完成试验的过程中一点一点地了解熟悉这个软件。在这个过程中也遇到了不少问题,比如输电线的画法、断路器的设置、仿真时出现错误的解决办法等等,在试验的最后,通过请教老师同学解决了这些问题,也对这个仿真软件有了一个初步的了解,为以后的学习打了基础。在以后的学习中,我要多点操作才能更好地熟悉这个软件。
实验二电力系统潮流分析入门 一、实验目的 通过对具体样程的分析和计算,掌握电力系统潮流计算的方法;在此基础上对系统的运行方式、运行状态、运行参数进行分析;对偶发性故障进行简单的分析和处理。 二、实验内容 本次实验主要在运行模式下,对样程进行合理的设置并进行电力系统潮流分析。 选择主菜单的Case Information Case Summary项,了解当前样程的概况。包括统计样程中全部的负荷、发电机、并联支路补偿以及损耗;松弛节点的总数。进入运行模式。从主菜单上选择Simulation Control,Start/Restart开始模拟运行。运行时会以动画方式显示潮流的大小和方向,要想对动画显示进行设定,先转换到编辑模式,在主菜单上选择Options,One-Line Display Options,然后在打开的对话框中选中Animated Flows Option选项卡,将Show Animated Flows复选框选中,这样运行时就会有动画显示。也可以在运行模式下,先暂停运行,然后右击要改变的模型的参数即可。 三、电力系统模型
实验一认识计算机硬件和网络结构 一、实验题目 认识计算机硬件和网络结构。 二、实验课时 2课时。 三、实验目的 认识计算机的主要构成部件、功能、型号、在计算机机箱内的位置、网络结构等。 四、实验内容和要求 1、利用多媒体演示计算机的主要组成部件:机箱、主板、CPU、内存条、硬盘、软驱、光驱、插槽、BUS总线、串行接口、并行接口、USB接口等; 2、打开机箱,实物展示并讲解个部件的功能及其连接; 3、机箱、主板、CPU、CPU风扇、内存条、显卡、网卡等分别如下所示。 机箱主板
内存条显卡网卡无线网卡 CPU CPU风扇硬盘 机箱背面并行接口串行接口USB接口 4、观察每个部件在机箱的位置,并掌握每个部件的功能和基本知识。 5、观察实验室网络结构图。 6、结合某网吧的例子更好地理解网络结构。 Parallel port Serial port USB port Keyboard and mouse ports
7、独立完成上述内容,并提交书面实验报告。 五、实验体会 通过本次实验,我了解了计算机的各种硬件和网络结构。知道了各种硬件的形状、功能、特征等。还知道了网络结构的流程、大体构造。这使我对计算机有了初步的认识,为以后更进一步的学习打下了坚实的基础。也为我以后的学习和生活提供了方便。 1、cpu——中央处理器,是一台计算机的运算核心和控制核心。 2、硬盘——是电脑的主要存储媒介之一。 3、主板——又叫主机板、系统板或母板,安装在机箱内,是微机最基本也是最重要的部件之一。 4、机箱——作为电脑配件的一部分,它起的主要作用是放置和固定各电脑配件,起到一个承托和保护作 用。 5、内存条——是连接CPU和其他设备的通道,起到缓冲和数据交换作用。
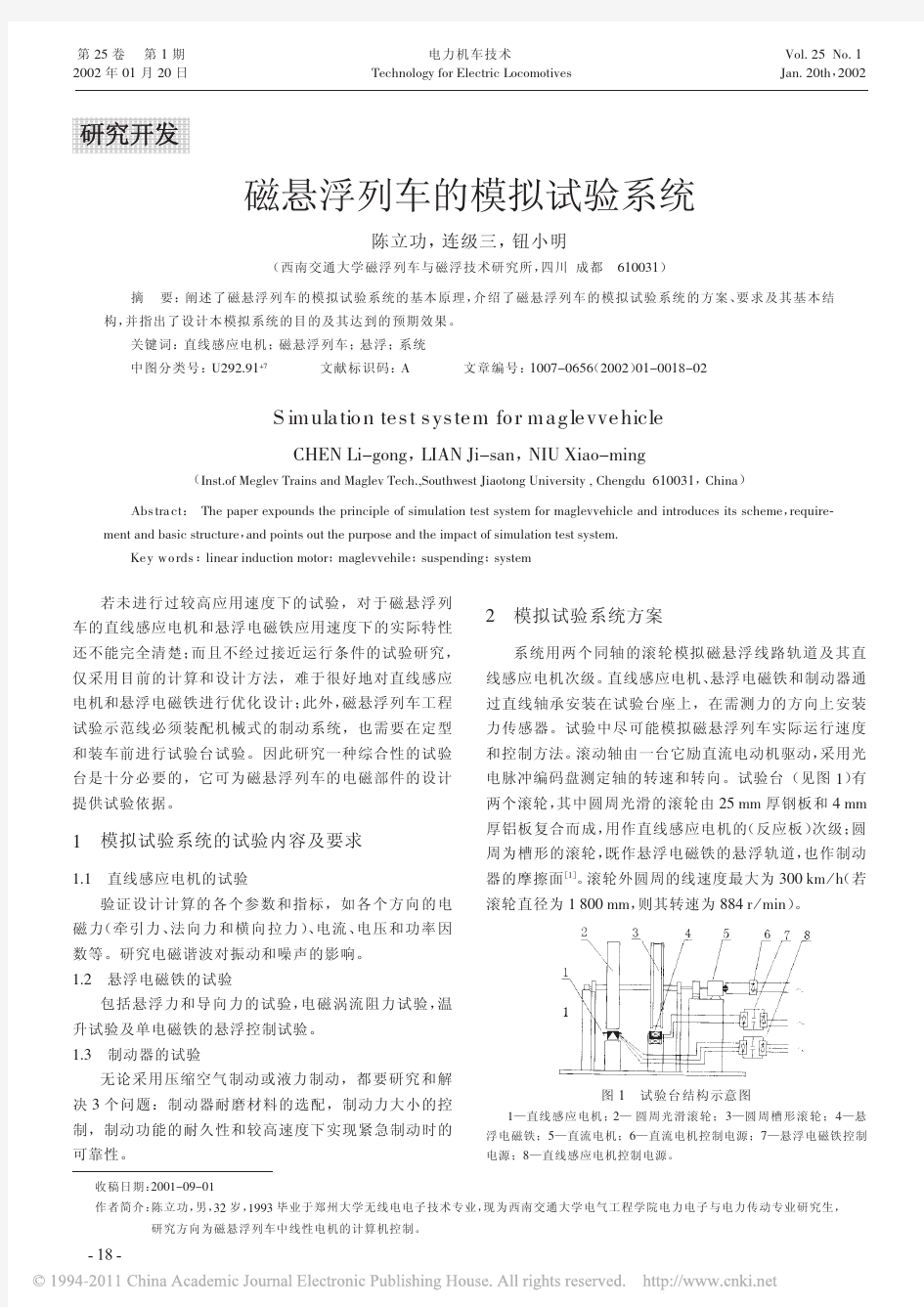
1 引言 近些年来,磁浮列车以其高速、节能、安全、舒适、环保等优点日益受到人们越来越多的关注。目前德国和日本是世界上磁浮列车研究最多的国家:德国已经研制了tr系列吸力型磁浮列车,并在埃姆斯兰建造了大型试验用的tve试验线;日本也研制了mlu系列斥力型磁浮列车和hsst系列吸力型磁浮列车,并修建了山梨试验线。我国也在积极开展这方面的研究工作,上海已从德国引进了tr08型磁浮列车,并已投入了商业运行,同时也拉开了消化吸收其先进技术的序幕。在磁浮列车运行系统中,合理有效的牵引供电系统是实现磁浮列车高速可靠运行的关键之一,故而成为本文的主要研究对象。 2 磁浮列车牵引供电系统概况 磁浮列车按照动力源(直线电动机)定子的长短相应可分为短定子直线电动机驱动的磁浮列车和长定子直线电动机驱动的磁浮列车。短定子直线电动机是将定子绕组安装在车体的底部,通过向磁浮列车提供变压变频的电源,由车上的短定子产生行波磁场; 轨道上安置结构较为简单的长转子,这种结构多用于直线异步牵引电动机的驱动系统。由于列车通过受流器供电,而高速受流困难使列车运行速度、异步电机的功率因数及效率均受到限制,因此该系统仅用于低速小功率短距离的电力牵引。长定子直线同步电动机驱动的磁浮列车的底部安置有直线电机的转子,整条轨道上安装同步电机的长定子绕组。磁浮列车内部对转子的供电简单,没有高速受流的困难。采用这种直线同步电动机驱动,适合于高速、大功率、长距离的电力牵引。德国和日本均采用这种系统。德国研制了常导吸浮式磁浮列车:由车上常导电流产生的电磁吸引力吸引轨道下方的导磁体,使列车浮起。常导电流比较容易获得,通常由蓄电池或感应式发电线圈等设备产生电流,供给同步直线电动机的转子。但常导系统电磁吸引力相对较小,列车悬浮高度约10mm,故对控制精度的要求很高。日本研制的超导斥浮型磁浮列车是由车上强大的超导电流产生极强的电磁场,该电磁场相对线路侧墙上的8字形导电环高速移动,使导电环感应出强大的环流,在8字形下半环中形成推斥磁场,而上半环中则形成吸力磁场,使列车悬浮。该悬浮系统是一个无需反馈控制的稳定系统,而且悬浮高度可在10cm左右,从而使控制相对简单。 3 上海高速磁浮列车的牵引供电系统[1] 上海运营的高速磁浮列车是从德国引进的tr08型磁浮列车,采用长定子直线同步电动机和常导吸浮式系统。其牵引供电系统如图1所示,由高压变压器(110kv/20kv)、输入变压器、输入变流器、逆变器和输出变压器等主要部件构成。 磁悬浮列车牵引供电系统从110kv网压经高压变压器变为20kv,再由输入变压器和输入变流器变为±2500v的直流电压。从直流环节来的直流电压,由三相三点式逆变器产生可变频率(0~300hz)、可变幅值(0~×4.3kv)、可调相角(0~360°)的三相交流电。磁悬浮列车的牵引变流器有两种工作模式:
本科实验报告实验名称:电路仿真
实验1 叠加定理的验证 1.原理图编辑: 分别调出接地符、电阻R1、R2、R3、R4,直流电压源、直流电流源,电流表电压表(Group:Indicators, Family:VOLTMETER 或AMMETER)注意电流表和电压表的参考方向),并按上图连接; 2. 设置电路参数: 电阻R1=R2=R3=R4=1Ω,直流电压源V1为12V,直流电流源I1为10A。 3.实验步骤: 1)、点击运行按钮记录电压表电流表的值U1和I1; 2)、点击停止按钮记录,将直流电压源的电压值设置为0V,再次点击运行按钮记录电压表电流表的值U2和I2; 3)、点击停止按钮记录,将直流电压源的电压值设置为12V,
将直流电流源的电流值设置为0A,再次点击运行按钮记录电压表电流表的值U3和I3; 4.根据叠加电路分析原理,每一元件的电流或电压可以看成是每一个独立源单独作用于电路时,在该元件上产生的电流或电压的代数和。 所以,正常情况下应有U1=U2+U3,I1=I2+I3; 经实验仿真: 当电压源和电流源共同作用时,U1=-1.6V I1=6.8A. 当电压源短路即设为0V,电流源作用时,U2=-4V I2=2A 当电压源作用,电流源断路即设为0A时,U3=2.4V I3=4.8A
所以有U1=U2+U3=-4+2.4=-1.6V I1=I2+I3=2+4.8=6.8A 验证了原理 实验2 并联谐振电路仿真 2.原理图编辑: 分别调出接地符、电阻R1、R2,电容C1,电感L1,信号源V1,按上图连接并修改按照例如修改电路的网络标号; 3.设置电路参数: 电阻R1=10Ω,电阻R2=2KΩ,电感L1=2.5mH,电容C1=40uF。信号源V1设置为AC=5v,Voff=0,Freqence=500Hz。 4.分析参数设置: AC分析:频率范围1HZ—100MHZ,纵坐标为10倍频程,扫描
电力系统继电保护 实验指导书 张艳肖编 适用于12级电气工程及其自动化专业 西安交通大学城市学院二○一五年三月
目录 第一部分MATLAB基础 ................................................................................... - 3 - 1.1 MATLAB简介 .......................................................................................... - 3 - 1.2 MATLAB的基本界面 ........................................................................... - 3 - 1.2.1MATLAB的主窗口 ...................................................................... - 3 - 1.2.2 MATLAB的主窗口 ....................................................................... - 3 - 1.3 SIMULINK仿真工具简介.................................................................... - 4 - 1.3.1SIMULINK的启动 ........................................................................ - 4 - 1.3.2SIMULINK的库浏览器说明........................................................ - 5 - 第二部分仿真实验内容.................................................................................. - 6 - 实验一电力系统故障.................................................................................... - 6 - 实验二电流速断保护.................................................................................... - 9 - 实验三三段式电流保护.............................................................................. - 13 - 实验四线路自动重合闸电流保护.............................................................. - 17 -
操作系统实验报告实验名称:文件管理 专业班级:网络工程1301 学号: 姓名: 2015 年6 月16 日
实验一文件管理 一、实验目的 文件管理是操作系统的一个非常重要的组成部分。学生应独立用高级语言编写和调试一个简单的文件系统,模拟文件管理的工作过程。从而对各种文件操作命令的实质容和执行过程有比较深入的了解,掌握它们的实施方法,加深理解课堂上讲授过的知识。 二、预备知识 1.VS2010的使用 2.C#的学习 3.文件主目录与子目录的理解 三、实验容与步骤 用高级语言编写和调试一个简单的文件系统,模拟文件管理的工作过程。要求设计一个10 个用户的文件系统,每次用户可保存10 个文件,一次运行用户可以打开5 个文件。系统能够检查打入命令的正确性,出错时能显示出错原因。对文件必须设置保护措施,例如只能执行,允许读等。在每次打开文件时,根据本次打开的要求,在此设置保护级别,即有二级保护。文件的操作至少有Create、delete、open、close、read、write 等命令。 所编写的程序应采用二级文件目录,即设置主文件目录和用户文件目录。前者应包含文件主及它们的目录区指针;后者应给出每个文件占有的文件目录,即文件名,保护码,文件长度以及它们存放的位置等。另外为打开文件设置运行文件目录(AFD),在文件打开时应填入打开文件号,本次打开保护码和读写指针等。 程序流程图:
逻辑设计: 使用线性数组表表示MFD,泛型数组表示UFD,每个元素包括用户ID、保存的文件数、再使用线性表表示文件信息,每个元素包括文件名,文件属性(保护码),文件的状态等信息。 物理设计: //主目录 private FileUser[] mfd; //当前用户 private FileUser currentuser; ///
收修改稿日期:19992102 26 作者简介:刘少克(1963—),男,1994年获华中理工大学电力学院电机专业博士学位,副教授,主要从事磁悬浮技术、电机控制等机电一体化技术工作。 综述与评论 德国磁悬浮列车TR 07推进和制动系统 刘少克 (国防科技大学机电工程与自动化学院,湖南长沙 410073) 摘 要:论述了德国磁悬浮列车TR 07推进和制动系统的工作原理、电机设计参数及供电技术。指出采用长定子同步电动机推进方式的TR 07具有电机工作效率高、功率因数高、运行成本低等优点。 关键词:磁悬浮列车;同步电动机;长定子;推进;制动 中图分类号:U 237 文献标识码:B 文章编号:10002128X (2000)0320010203 The propulsive and brak i ng system s of German maglev veh icle TR 07 L Shao -ke (M ach ine and E lectric Engineering and A utom atic Contro l A cadem y of N ati onal U niversity of D efense T echno logy ,Changsha ,H unan 410073,Ch ina ) Abstract :T he p rinci p les of p ropulsive and brak ing system s of Ger m an m aglev veh icle TR 07,as w ell as mo to r design param eters and pow er supp ly technique are discussed .It is po inted out that TR 07,driven by synch ronous mo to r w ith long stato rs ,po sseses features such as h igh efficiency ,h igh pow er facto r and low operati on co sts .Key words :m aglev veh icle ;synch ronous mo to r ;long stato r ;p ropulsi on ;brake 磁悬浮列车是一种面向未来的交通工具,其推进 系统是主要的耗能部分。推进方式目前主要有2种:一种是采用短初级普通异步直线电动机,这种方式以日本H SST —100系列为代表,一般用于低速磁悬浮列车(300km h 以下);另一种方式是采用长定子同步直线电动机,这种方式以德国TR 07为代表,一般用于高速磁悬浮列车(500km h 左右)。 德国TR 07属于常导高速型磁悬浮列车,它的最大特点是取消了低速常导磁悬浮列车的受流线,采用长定子同步电动机来提供牵引力,而车上供电则通过直线发电机(带备用电池)提供。 1 推进系统工作原理 TR 07运行时靠长定子同步直线电动机推进。它 的长定子绕组放在地面,由地面变电设备供电,而车上悬浮电磁铁作为电动机的励磁转子。车上采用直线发电机(带备用电池)作为电源,它向悬浮 导向磁铁及车上所有用电设备(如控制仪器、照明、通信等)提供电 能。 长定子同步直线电动机的定子绕组沿整个列车轨道敷设。TR 07的推进原理是:当同步直线电动机的定子绕组流过电流时,它产生的磁场与车上悬浮电磁铁流过电流时产生的磁场相互作用,从而产生列车牵引力。这里悬浮电磁铁产生的悬浮磁场同时也作为直线同步电动机的励磁磁场。根据同步电动机的工作原理:只有当励磁磁场与定子绕组磁场(电枢磁场)两者达到同步时,才能产生恒定的牵引力,因此,必须精确检测列车的运行速度、位置,据此来对直线同步电动机定子绕组提供相应频率的电流。TR 07定子绕组供电频率为0~215H z ,对应列车运行速度0~400km h 。由于要保证车体稳定悬浮,在悬浮气隙一定的情况下,其悬浮电流大小基本恒定,因此,同步直线电动机牵引力的大小只能通过调节定子绕组电流来实现。定子绕组最大的设计电流为1200A 。 TR 07在静态悬浮及运行速度较低时,通过备用电池提供车上电能,当车体达到一定速度时,则切换到直线发电机供电。 直线发电机的定子线圈位于车上悬浮电磁铁极靴 — 01—2000年第3期机 车 电 传 动№3,2000 2000年5月10日EL ECTR I C DR I V E FOR LOCOM O T I V E M ay 10,2000
电力系统分析仿真实验报告
————————————————————————————————作者:————————————————————————————————日期:
电力系统分析仿真 实验报告 ****
目录 实验一电力系统分析综合程序PSASP概述 (3) 一、实验目的 (3) 二、PSASP简介 (3) 三、实验内容 (5) 实验二基于PSASP的电力系统潮流计算实验 (9) 一、实验目的 (9) 二、实验内容 (9) 三、实验步骤 (14) 四、实验结果及分析 (15) 1、常规方式 (15) 2、规划方式 (23) 五、实验注意事项 (31) 六、实验报告要求 (31) 实验三一个复杂电力系统的短路计算 (33) 一、实验目的 (33) 二、实验内容 (33) 三、实验步骤 (34) 四、实验结果及分析 (35) 1、三相短路 (35) 2、单相接地短路 (36) 3、两相短路 (36) 4、复杂故障短路 (36) 5、等值阻抗计算 (37) 五、实验注意事项 (38) 六、实验报告要求 (38)
实验五基于PSASP的电力系统暂态稳定计算实验 (39) 一、实验目的 (39) 二、实验内容 (39) 三、实验步骤 (40) 四、实验结果级分析 (40) 1、瞬时故障暂态稳定计算 (40) 2、冲击负荷扰动计算 (44) 五、实验注意事项 (72) 六、实验结果检查 (72)
实验一电力系统分析综合程序PSASP概述 一、实验目的 了解用PSASP进行电力系统各种计算的方法。 二、PSASP简介 1.PSASP是一套功能强大,使用方便的电力系统分析综合程序,是具有我国自主知识产权的大型软件包。 2.PSASP的体系结构: 报表、图形、曲线、 潮流计算短路计 电网基固定用户自定固定 第一层是:公用数据和模型资源库,第二层是应用程序包,第三层是计算结果和分析工具。 3.PSASP的使用方法:(以短路计算为例) 1).输入电网数据,形成电网基础数据库及元件公用参数数据库,(后者含励磁调节器,调速器,PSS等的固定模型),也可使用用户自定义模型UD。在此,可将数据合理组织成若干数据组,以便下一步形成不同的计算方案。
电气2013级卓班电力电子技术与电力系统分析 课程实训报告 专业:电气工程及其自动化 班级: 姓名: 学号: 指导教师:
兰州交通大学自动化与电气工程学院 2016 年 1 月日
电力电子技术与电力系统分析课程实训报告 1 电力电子技术实训报告 1.1 实训题目 1.1.1电力电子技术实训题目一 一.单相半波整流 参考电力电子技术指导书中实验三负载,建立MATLAB/Simulink环境下三相半波整流电路和三相半波有源逆变电路的仿真模型。仿真参数设置如下: (1)交流电压源的参数设置和以前实验相关的参数一样。 (2)晶闸管的参数设置如下: R=0.001Ω,L =0H,V f=0.8V,R s=500Ω,C s=250e-9F on (3)负载的参数设置 RLC串联环节中的R对应R d,L对应L d,其负载根据类型不同做不同的调整。 (4)完成以下任务: ①仿真绘出电阻性负载(RLC串联负载环节中的R d= Ω,电感L d=0,C=inf,反电动势为0)下α=30°,60°,90°,120°,150°时整流电压U d,负载电流L 和晶闸管两端电压U vt1的波形。 d ②仿真绘出阻感性负载下(负载R d=Ω,电感L d为,反电动势E=0)α=30°,60°,90°,120°,150°时整流电压U d,负载电流L d和晶闸管两端电压U vt1的波形。 ③仿真绘出阻感性反电动势负载下α=90°,120°,150°时整流电压U d,负载电流L d和晶闸管两端电压U vt1的波形,注意反电动势E的极性。 (5)结合仿真结果回答以下问题: ①该三项半波可控整流电路在β=60°,90°时输出的电压有何差异?
华北水利水电学院数据结构实验报告 2011~2012学年第二学期2011级计算机专业 班级:**** 学号:***** 姓名:**** - 实验二栈和队列及其应用 一、实验目的: 1.掌握栈的特点(先进后出FILO)及基本操作,如入栈、出栈等,栈的顺序存储结构和链式存储结构,以便在实际问题背景下灵活应用。 2.掌握队列的特点(先进先出FIFO)及基本操作,如入队、出队等,队列顺序存储结构、链式存储结构和循环队列的实现,以便在实际问题背景下灵活运用。 二、实验内容: 1.链栈的建立、入栈、出栈操作。 2.环形队列的建立、入队、出队操作。 3.停车场管理。设停车场内只有一个可停放n辆汽车的狭长通道,且只有一个大门可供汽车进出。汽车在停车场内按车辆到达时间的先后顺序,依次由北向南排列(大门在最南端,最先到达的第一辆车停放在车场的最北端),若车场内已停满n辆汽车,则后来的汽车只能在门外的便道上等候,一旦有车开走,则排在便道上的第一辆车即可开入;当停车场内某辆车要离开时,在它之后开入的车辆必须先退出车场为它让路,待该辆车开出大门外,其它车辆再按原次序进入车场,每辆停放在车场的车在它离开停车场时必须按它停留的时间长短交纳费用。试为停车场编制按上述要求进行管理的模拟程序。 实现提示:以栈模拟停车场,以队列模拟车场外的便道,按照从终端读入的输入数据序列进行模拟管理。每一组输入数据包括三个数据项:汽车“到达”或“离去”信息、汽车牌照号码及到达或离去的时刻,对每一组输入数据进行操作后的输出数据为:若是车辆到达,则输出汽车在停车场内或便道上的停车位置;若是车离去;则输出汽车在停车场内停留的时间和应交纳的费用(在便道上停留的时间不收费)。栈以顺序结构实现,队列以链表(带头结点)实现。 需另设一个栈,临时停放为给要离去的汽车让路而从停车场退出来的汽车,也用顺序存储结构实现。输入数据按到达或离去的时刻有序。栈中每个元素表示一辆汽车,包含两个数据项:汽车的牌照号码和进入停车场的时刻。 设n=2,输入数据为:(‘A’,1,5),(‘A’,2,10),(‘D’,1,15),(‘A’,3,20),(‘A’,4,25),(‘A’,5,30),(‘D’,2,35),(‘D’,4,40),(‘E’,0,0)。每一组输入数据包括三个数据项:汽车“到达”或“离去”信息、汽车牌照号码及到达或离去的时刻,其中,‘A’表示到达;‘D’表示离去,‘E’表示输入结束。 三、实验要求: 1.C/ C++完成算法设计和程序设计并上机调试通过。 2.撰写实验报告,提供实验结果和数据。 3.写出算法设计小结和心得。 四、程序源代码: 1.#include