2012~2013学年度电气与电子工程学院研究生课程
《太阳能光伏并网发电系统》课程报告
固定电流法与变步长扰动观察法结合的
MPPT算法研究
院系:电气与电子工程学院
专业:应用电子工程系
任课教师:
学生姓名:
学号:
指导教师:
二○一三年五月
ABSTRACT:The output power of PV module is a non-linear function of temperature, solar insolation and loads, so it is necessary to track MPP of the PV array all the time. When the external environment rapidly changes,in order to regulate the PV array operating point near the maximum power point quickly, the online constant-current method to track MPP is utilized at first, and then the variable step P&O is adopted to adjust the PV array operating point to be at the maximum-power point. The simulation of the improved method and common methods show that, contrast to the latter, the former can trace the maximum-power point more quickly, efficiently and accurately, which is concise and easy to implement, and also can reduce the energy loss caused by the oscillation of the operating point about the maximum-power point, thus enhancing the PV system efficiency.
KEYWORDS:Photovoltaic panel characteristics; maximum power point tracking; constant current method; variable perturb step perturbation and observation method
摘要:光伏器件输出功率是外部环境、负载的非线性函数,为了充分发挥光伏器件的效能,需采用最大功率点跟踪方法进行控制。当外界环境突变时,采用在线固定电流法进行初步跟踪,调整光伏阵列的工作点到最大功率点附近。在此基础上再使用变步长扰动观察法,使得工作点进一步调节到最大功率点,并有效减少了光伏阵列输出功率在最大功率点的振荡。对该结合方法及相关的MPPT算法分别仿真,结果表明,该方法可以在外界环境剧烈变化下快速、有效、准确地跟踪最大功率点,简明易于实现,同时有效减少在光伏阵列最大功率点附近振荡所带来的能量损失,提高了光伏发电系统的效率。
关键词:光伏电池特性;最大功率点跟踪;固定电流法;变步长扰动观察法
1引言
光伏电池是光伏发电系统电能的来源,光伏电池输出功率是其所受日照强度、器件结温的非线性函数。即使在外部环境稳定的情况下,光伏电池的输出功率也会随着外部负载的变化而变化,只有当外部负载与光伏器件达到阻抗匹配时,光伏器件才会输出最大功率。为了实时从光伏阵列获得最大输出功率,需要在光伏发电系统中实现最大功率点的跟踪控制。通常的实现方法是需根据外部环境和负载情况不断调节光伏器件的工作点使其输出最大功率,我们将此功率调节过程称为最大功率点跟踪(Maximum Power Point Tracking,MPPT)。
MPPT电路常用的控制方法有固定参数法(如固定电压法、固定电流法)、扰动观察法及增加电导法等。各种MPPT控制方法中,固定电流法和扰动观察法因简单有效而较常用,但各自也存在缺陷。本文在分析固定电流法和扰动观察法的基础上,采用了一种固定电流法结合扰动观察法的MPPT控制。在外界环境或负载突变时,采用在线固定电流法将光伏阵列的工作点调整到最大功率点附近,以保证跟踪的快速性。在此基础上,为进一步提高对光伏阵列的利用效率,在最大功率点附近,采用变步长扰动观察法,从而减小系统在最大功率点附近的振荡。
2光伏电池特性
光伏电池单元是非线性器件,它的等效电路模型如图2.1所示。图2.1中的电流源产生光生电流I ph,它的数值由光照强度与温度共同决定。串联电阻R S与并联电阻R P用来表征太阳能电池内部的功率损耗。由于太阳能电池表面的材料的电阻率,当电流经过太阳能板流向外部内路时,其必然为产生串联损耗,故引入串联电阻R S。并联电阻R P表征由漏电流引起的损耗。
I ph
I
图2.1 光伏电池等效电路
根据图2.1可得光伏电池的输出电压V 和输出电流I 之间的关系式:
()exp 1S S
ph sat P
q V IR V IR I I I AKT R ?+?+??=---???????? (2.1) 其中I ph 代表光生电流,I sat 代表二极管反向饱和电流,A 是二极管特性因子,K 为玻耳兹曼常数,T 为外界环境绝对温度,R S 和R P 分别为光伏电池的串联和并联电阻。虽然式(2.1)给出了准确的光伏电池I-V 关系式,但是等式中用到的参数I ph 、I sat 、A 、R S 、R P 并不由太阳能电池产商提供,因此难以确定其值。太阳能电池产商只提供标准外界条件下太阳能电池板三个工作点的电压电流值,分别为开路电压V oc ,短路电流I sc 以及最大功率点的电压V MPP ,与电流I MPP 。为了得到由上述四个参数所表示的太阳能电池I-V 关系式,在等价前提下变换式(2.1)。在等式变换之前,先对式(2.1)进行两项近似:
1.忽略()/S P V IR R +项,因为R P 很大,此项值远远小于I ph
2.设定ph SC I I =,因为R S 远远小于二极管导通电阻
在上述两项近似的前提下,代入三个工作点的电压电流值,分别为0I =时,OC V V =,0V =时,SC
I I =以及MPP I I =时MPP V V =,从而解出
121exp 1SC OC V
I I C C V ????=--?? ????
? (2.2)
其中12121exp 1ln 1MPP MPP SC OC MPP MPP OC SC I V C I C V V I C V I -?????
=--? ? ?
????
?????????=--?? ? ?????????
(2.3)
只要根据光电池厂商提供的I SC 、V OC 、I MPP 、V MPP 等参数就可以确定该型光伏电池的输出模型。但是由于厂家提供的这些参数一般是在标准温度T ref (°25C )和标准日照功率S ref (21000W/m )下的测试结果,在实际应用中还需要进行补偿。补偿公式如下:
(
)()
11(1)ln()1(1)ln()ref ref SC SC ref
OC OC MPP MPP ref
MPP
MPP T T T S S S S I I aT S V V cT e bS S I I aT S V V cT e bS =-??=-?
?
?'=+???'=-+?'=+??'=-+?? (2.4) 其中,a 、b 、c 是常数,通常:0.0025/C a ?=,0.5b =,0.0028/C c ?=。
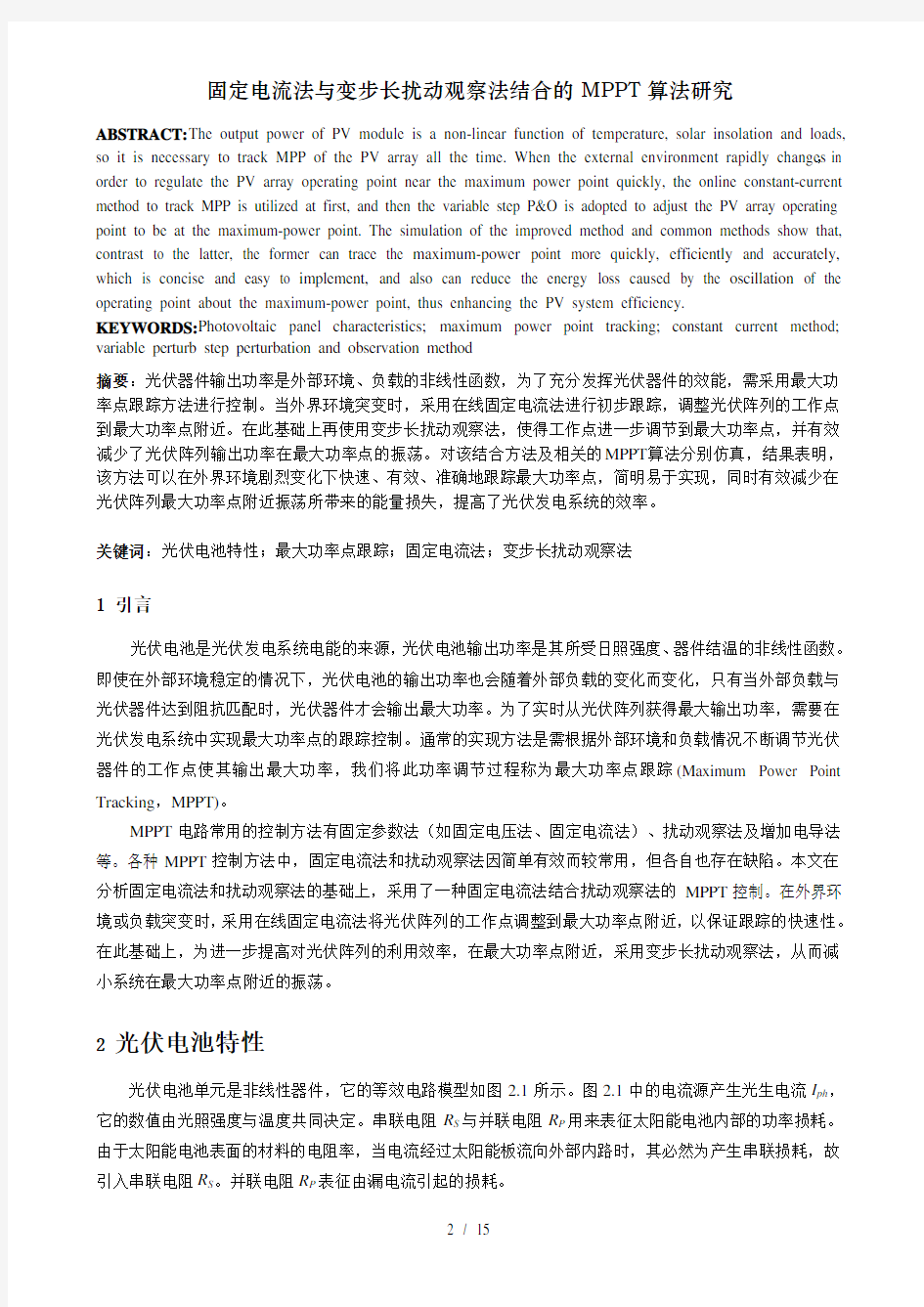
在实际应用中,只需测量出当时环境条件下的上述四个参数值,就可得到光伏电池的I —V 特性方程,这为后续的研究工作提供了基础。以无锡尚德太阳能电力有限公司生产的STP0950S-36光伏阵列为例。其提供的数据手册参数为 4.5A MPP I =、21.7V MPP V =、 4.8A SC I =、24.2V OC V =,且该光伏电池组由36块光伏电池串联组成。按照上述方法,在不同光强和温度下对该光伏阵列进行Simulink 仿真。光伏电池的仿真模型及仿真结果如图2.2和图2.3所示。从图中可以看出,随着光强的减小,输出最大功率减小同时最大功率点处对应的电压减小。
图2.2 光伏电池仿真模型
0500
1000
1500
2000
2500
3000
3500
V (V)
P (W )
S=1000W/m 2S=800W/m 2S=600W/m 2S=400W/m 2S=200W/m 2
图2.3 不同光强下光伏阵列的P-V 特性仿真曲线
据此建立的光伏组件仿真模型可以模拟光伏电池在各种环境条件下的电气特性,并能模拟在外界环境变化过程中光伏电池的电气特性,为光伏系统的最大功率跟踪控制的仿真提供基础。
3 MPPT
控制原理
MPPT 电路常用的控制方法有固定参数法(如固定电压法、固定电流法)、扰动观察法及增加电导法等。 固定参数法利用在最大功率点工作时光伏器件工作电压、电流与器件开路电压、短路电流的近似比例
关系进行控制,此方法只需一个检测参数,控制简单易行,但获取开路电压或短路电流要中断系统正常工作,对系统运行存在干扰,此外所采用的控制关系是近似关系,不能实现最优控制,因此该方法控制精度低,仅适用于小功率场合。
扰动观察法是MPPT 控制中的一种常见方法。扰动观察法控制思路如下:假设增加变换器的占空比,若光伏阵列输出功率增加,则占空比继续增加,反之占空比减少;假设减少变换器的占空比,若光伏阵列输出功率增加,则占空比继续减少,反之占空比增加。占空比的改变值称为扰动步长Δd ,在选取扰动步长大小时要兼顾光伏发电系统动态特性及稳态特性。扰动观察法虽然控制简单,控制效果也较好,但是在最大功率点附近存在功率振荡现象,且在日照突变的情况下有可能失去对最大功率点的跟踪。
从前面的分析可知,扰动观察法在日照稳定情况下MPPT 控制效果较好,对光伏器件的利用效果较高,但存在最大功率点处功率振荡的现象。此外,在日照突变情况下会失去对MPPT 的控制能力。固定电流法控制精度差,但是在外部环境突变情况下,仍能使光伏器件输出功率跟踪日照的变化。为了使光伏发电系统能够快速响应日照变化,且能充分发挥光伏器件的作用,本文采用了将固定电流法和扰动观察法结合运用到MPPT 电路控制中的方法:
当外部环境变化时,光伏器件的短路电流会发生变化,由于短路电流法利用MPP SC I k I ≈?进行光伏器件输出功率的控制,因此只要知道I SC 就能使光伏器件的输出功率重新接近最大功率点。当系统实现短路电流法的控制目标后,通过变步长扰动观察法使光伏器件的工作点继续向最大功率点移动,最后稳定工作在最大功率点。
3.1 在线固定电流法
传统的光伏器件短路电流I SC 采样过程对系统运行短路采样,因此会降低系统的效率并使控制变得复杂,这也是固定电流法采用较少的原因。在此,采用了短路电流在线获得的方法,在不进行短路采样的情况下便可获得短路电流I SC 。根据光伏电池的V-I 特性可知光伏电池输出功率的函数为:
()exp 1S SC sat q V IR P VI VI VI AKT ?+???==--????
???
? (3.1) 电池输出功率对输出电压的导数关系为:
()()d /d exp 1S S SC sat sat q V IR q V IR P V I I I AKT AKT ++????
=-?+-????????
(3.2) 根据光伏电池P-V 关系得到的d P /d V -V 特性曲线如图3.1所示。由图3.1可知:①在区间I ,虽然光伏电池输出电压不断增加,但d P /d V 基本不变,大小近似等于光伏电池的短路电流I SC ,光伏器件的输出功率
与输出电压成线性关系;②在区间Ⅱ,d P /d V 快速下降直到零,该过程中光伏电池的输出功率随输出电压上升而增加但速度变慢,当dP/dV=0时光伏器件工作在最大功率点;③在区间Ⅱ,随着输出电压进一步增加,dP/dV 变为负值,该值随输出电压的增加快速下降,输出功率随输出电压的进一步上升而快速减小。
图3.1 光伏电池d P /d V -V 特性曲线
因此我们只需使系统工作在偏离最大功率点左侧一定的区间内就可以得到电池的短路电流,此时光伏器件的输出功率也不会跌落很多。该方法无需将电池短路,从而减小了I SC 采样对系统正常运行的干扰。在得到电池短路电流后就可以根据MPP SC I k I ≈?的关系对系统进行初步的最大功率点跟踪控制。
3.1 变步长扰动观察法
为了达到更好的跟踪效果,在扰动观察法MPPT 控制时采用一种变步长扰动观察法,将其与短路电流法结合,使得能在各个阶段下均能获得最佳扰动步长,让光伏阵列无论在任何光照条件下都能达到最大功率。模糊控制是普遍使用的变步长MPP 控制方法,它虽然具有较佳的快速性和稳定性,但该方法实现复杂,工程应用较为困难。为克服模糊控制方法的缺点,提出了一种简单的控制变步长扰动观察法控制方法。在控制过程中,△d 共有两个等级,较大者用于距离最大功率点较远时调节;较小者用于光伏电池工作在最大功率点附近,以降低功率振荡。该方法的关键是如何有效实现两个不同△d 的转换。
由图3.1可知,d P /d V 在最大功率点两侧的符号是不同的,但在扰动观察法控制下,在最大功率点附近光伏电池工作点交替在区间II 和Ⅲ之间转换,在转换过程中:
11
1
10 <0 k k k k k k k k P P J V V P P J V V ----???
=?>????????=?????
最大功率点两侧工作点过最大功率点
(3.3) 上式表明J 为正时,光伏器件未到达最大功率点;J 由正变为负时,工作点从最大功率点一侧转移到另一侧,光伏电池工作在最大功率点附近。
当J>0时,光伏器件仍未达到最大功率点,此时△d 较大,采用大步长扰动观察法,以快速跟踪外部环境变化能力。当J <0时,表明光伏器件处于最大功率点附近,此时△d 减小,△P 也减小,采用小步长
扰动观察法,提高了光伏电池平均输出功率,J 仍小于零。
当外部环境发生微小变化时,引起的功率变化也比较小,即使△d 较小,仍能使光伏器件快速恢复到最大功率点附近,J 仍为负;当外部环境发生较大变化时,△P 也较大,从而导致系统远离最大功率点,小步长扰动量不能满足系统快速跟踪外部环境变化,则切换为大步长扰动量。如果外部环境变化剧烈,则跳出,采用固定电流法控制。
图3.2 MPPT 控制流程图
MPPT 的控制流程图如图3.2所示。其中△D 指固定电流法使用校正控制使输出电流稳定到I MPP 上,校正控制计算出的占空比的步长增量,△d 指小步长扰动观察法中占空比步长增量。对光伏电池进行采样,定义系统在k 时刻光伏阵列的输出电压及输出电流分别为V(k)和I(k):①计算在时刻k 光伏电池的输出功率,并和k -1时的输出功率、输出电压进行比较,判断系统是否工作在最大功率点左侧,即是否处于电流源模式;②若系统不处于电流源模式,则调整MPPT 电路开关的占空比使系统工作在电流源模式;③如果系统工作在电流源模式,通过电池输出电压、输出电流可计算得出k 时刻=/k k k I P V ??及k -1时刻111=/k k k I P V ---??,比较两次电流的误差k I ?,如果两者差值在误差范围内,则I k 值可认为等于短路电流,
将该电流用于MPPT 的固定电流控制;④如果k I ?超出规定范围,同时系统工作在最大功率点左侧,则可以推断系统工作在最大功率点附近,此时采用变步长扰动观察法进行控制。该过程不断重复直到△P 近似
等于零,此时系统工作在最大功率点。
4 系统参数的设定
由前文的参数可知,光伏电池阵列的稳定工作电压较高,故此处的DC-DC 变换器选用Buck 降压电路。由于MPPT 控制采用的是固定电流法结合扰动观察法,当光伏电池工作在最大功率点左侧的电流源模式下,即电流误差k I ?在误差范围内,可在线计算出短路电流I SC ,并可根据MPP SC I k I ≈?的关系,将给定电流转化为参考值输入控制输出电压。在此应使用校正装置使光伏电池输出电压稳定到参考值附近,故在此需确定校正装置的参数。简化的Buck 电路系统入图4.1所示,图中标出了所有的状态变量,其中输出负载由大电容模拟,可近似看成稳压源。在本系统中,Buck 电路要调节的是其输入即光伏电池的电压而非输出电压,因此本系统所要计算的传递函数有别于传统的Buck 电路的传递函数。所求的传递函数为()()/()vd G s v t d t =,其中()v t 为光伏电池的输出电压,()d t 是占空比信号。
+
V b _
图4.1 MPPT 系统电路图
根据图4.1列出系统的状态方程:
[]d ()
=()()()
d d ()
()()d b v t C F v t d t i t t i t L d t v t V t
?-???=-? (4.1) 式中,F [v(t)]为光伏电池的输出电流,可以由式(2.2)和式(2.3)求得。重写式(2.2)和式(2.3)如下:
121exp 1SC OC V I I C C V ????=--?? ????
? (4.2)
其中12121exp 1ln 1MPP MPP SC OC MPP MPP OC SC I V C I C V V I C V I -?????
=--? ? ?
????
????
?????=--?? ? ?????????
(4.3)
V OC 、I SC 、V MPP 、I MPP 分别为光伏电池的开路电压,短路电流以及最大功率点的电压与电流。根据仿
真中所采用的光伏电池模型的特性指标, 4.5A MPP I =,3621.7V=781.2V MPP V =?, 4.8A SC I =,3624.2V=871.2V OC V =?代入后可求得:
[]()
()1132.461
() 4.8 1.0610v t v t K
I F v t e
A Be
-==-?=- (4.4)
将式(4.4)带入式(4.1)中,并对所有状态变量采用小信号扰动法消去直流量,得到:
()
2
2
d ()
=()()d d ()
()()d ()()()V v t K K vd V K v t C
Be e Id t Di t t i t L Dv t Vd t t
v t sIL DV
G s d t BL CLs e s D K
?---???=+?+==-
++ (4.5) 对()v t K
e
采用麦克劳林公式展开()2
221()2v t K
v v e
v k k
ο=+++得到:
()
d ()
=()()d d ()()()d V v t K K v t C Be e Id t Di t t i t L Dv t Vd t t
?---???=+? (4.6) 进行拉普拉斯变换后解得系统的传递函数为
22
()
()()
vd V
K
v t sIL DV
G s d t BL CLs e s D K
+=
=-++ (4.7) 代入实际值D=0.768、V=781.2V 、I =4.5A 、L =2.5mH 、C =220μF 、A =4.8、-111.0610B =?、K =32.461解得
-72-50.0112560
() 5.5010 2.31100.59
vd s G s s s +=-
?+?+ (4.8)
由公式知()vd G s 包含一个零点和两个极点,分别为:849Hz z f =,P1P2188Hz f =,,直流增益为60dB ,根据式(4.8)画出()vd G s 的波特图如图4.2所示。从图中可以看出,系统在188Hz 处先遭遇两个极点,幅度曲线斜率为-40dB/dec ,相位有180度的下降;而后在849Hz 遇上一零点,幅度曲线斜率变为-20dB/dec ,相位回升90度。与传统Buck 电路的传递函数相比,它多了一个位于带宽内的零点,此零点改善了系统相位裕量,但系统低频增益太低,系统需进一步补偿。
本系统的开关频率s f 为20kHz ,增益交越频率的值可设计在开关频率的1/2-1/10的范围内,在本论文中为了更好地滤除高频噪声,设置其值为开关频率的1/5,即=0.2=4kHz c s f f 。由于增益交越频率为4kHz ,因此()vd G s 的零极点都在带宽之内,都会对系统的稳定性产生影响,由图4.2可知,()vd G s 的低频增益太高,需要在低频处引入一个极点以降低低频增益。低频极点的引入,会使得系统相位裕量变差,因此还要在带宽点引入一个零点,用于抵消此低频极点的影响。零点的产生相对应会产生一个极点,为了令此极点对系统不产生影响,此极点的频率值应远大于增益交越频率。综上可知,传递函数()c G s 应包含两个极点与一个零点。其中零点和第一个极点位于低频处,第二个极点位于高频处。
()c G s 的第一个极点PP1=0f ,用于提高系统的低频增益;零点设计为ZZ1P1P2=0.119Hz f f =,,用于抵消()vd G s 的两个极点;第二个极点设计为PP2=10=200kHz s f f ,对系统不产生影响,求得
-60.0084+1
()=15
(7.9610+1)
c s G s s s -? (4.9)
式(4.8)与式(4.9)相乘,得到系统的开环传递函数。图4.3为用Matlab 画出的校正后系统开环函数伯德图。由图4.3可得c f 为4.33kHz ,相位裕量为36.1度。
-500
50
100
M a g n i t u d e (d B
)10
10
10
10
10
P h a s e (d e g )
Bode Diagram
Frequency (rad/sec)
图4.2 系统开环传递函数伯德图
M a g n i t u d e (d B )10
10
10
10
10
10
10
10
P h a s e (d e g )
Bode Diagram
Frequency (rad/sec)
图4.3 校正后系统开环传递函数伯德图
扰动观察法虽控制简单、容易实现,对参数检测的精度要求不高,在日照变化不是很剧烈的情况下具有较好的MPPT 控制效果,但由于该方法始终对MPPT 电路中的功率器件施加扰动,故光伏器件的输出功率只能工作在最大功率点附近。在控制过程中,扰动步长Δd 的值对最大功率点控制的影响较大:Δd 较大时,该控制方法对日照变化跟踪速度快,但是由于光伏器件特性不对称,其输出功率会在最大功率点附近产生功率振荡现象;Δd 较小时,可减弱或消除光伏器件输出功率的振荡,但对日照变化的跟踪速度变慢。实际应用中要对其进行实验后才可选定扰动步长Δd 。
500
10001500
20002500
3000
3500
(a )Δd 为1%T S (b )Δd 为0.2%T S
图4.4 扰动观察法不同扰动步长输出功率仿真波形
图4.4是Δd 分别为1%T S 和0.2%T S 情况下扰动观察法的仿真波形,其中T S 为MPPT 电路中开关器件
的工作周期。从图中可以看出:○
1扰动步长Δd 较小时,光伏器件的输出功率仅存在一定的波动,没有功率振荡现象发生,但对日照反映速度较慢;○
2扰动步长Δd 较大时,光伏器件的输出功率对日照变化的响应速度较快,但在最大功率点附近存在严重的功率振荡现象。由于本文中,只在最大功率点附近才进行扰动观察法控制,为了更大的减小功率振荡现象,提高光伏电池的利用效率,故采用较小的扰动步长,即Δd 为0.5%T S 和0.2%T S 。
5 系统仿真
为了验证所本文方法的有效性,在Matlab 软件下对该方法进行了仿真,仿真模型如图5.1所示。在温度为25℃的情况下,仿真可得光强在500W/m 2时最大功率为1690W ,在光强为1000W/m 2时最大功率为3261W 。光强在0.5s 时由500W/m 2急剧变化到1000W/m 2的情况下,分别采用扰动观察法和固定电流结合扰动观察法进行MPPT 仿真,可以得到如图5.2~图5.4所示结果。根据上述各图所示的仿真结果,可以总结出MPPT 方法在稳态情况下的比较如表5.1所示。
图5.1 MPPT控制系统仿真模型
当电池外部环境发生变化时,电池输出功率经过动态过程后达到稳定。对比图5.2、图5.3可以看出,在扰动观察法中步长大时,在光强变化时能迅速跟踪最大功率点,但稳态输出时功率存在较大的波动。从表5.1中看出,步长大时稳态输出功率均值呈现下降。从图5.4可以看出,在光强突变时,结合法采用固定电流法对最大功率点进行快速跟踪,使工作点快速移动到最大功率点附近,在稳态输出时,采用变步长的扰动观察法,不断逼近最大功率点。
W
/
P
T/s
图5.2 △D=0.02时的扰动观察法仿真波形
数学与计算科学学院 实验报告 实验项目名称使用精确搜索算法确定步长的最速下降法 所属课程名称最优化方法 实验类型算法编程 实验日期 201 班级 学号 姓名 成绩 一、实验概述: 【实验目的】
(1) 掌握精确搜索算法确定步长的最速下降法; (2) 使用计算机语言表达最优化方法。 【实验原理】 最速下降法又称为梯度法,是1847年由著名数学家Cauchy 给出的。他是解析法中最古老的一种,其他解析方法或是它的变形,或是受它的启发而得到的,因此它是最优化方法的基础。 设无约束问题中的目标函数 f : Rn R1一阶连续可微。 最速下降法的基本思想是:从当前点k x 出发,取函数 f (x)在点k x 处下降最快的方向作为我们的搜索方向k p .由 f (x)的 Taylor 展式知 ()()()() k k k k T k k f x f x tp t f x p o tp -+=-?+ 略去t 的高阶无穷小项不计,可见取()k k p f x =-?时,函数值下降得最多。于是,我们可以构造出最速下降法的迭代步骤。 解无约束问题的的最速下降法计算步骤 第 1 步 选取初始点(0)x ,给定终止误差ε ,令k:=0; 第 2 步 计算?f (k x ),,若‖?f (k x )‖≤ ε ,停止迭代.输出k x .否则 进行第三步 第 3 步 取()k k p f x =-?; 第 4 步进行一维搜索,求k t ,使得 1()(())min (()) k k k k k k f x f x t f x f x t f x +=-?=-? 令,k:=k+1,转第2 步。 由以上计算步骤可知,最速下降法迭代终止时,求得的是目标函数驻点的一个近似点。 【实验环境】 计算机 VC++
第26卷第20期中国电机工程学报V ol.26 No.20 Oct. 2006 2006年10月Proceedings of the CSEE ?2006 Chin.Soc.for Elec.Eng. 文章编号:0258-8013 (2006) 20-0098-05 中图分类号:TM51 文献标识码:A 学科分类号:480?60 短路电流结合扰动观察法在光伏发电 最大功率点跟踪控制中的应用 张超,何湘宁 (浙江大学电力电子研究所,浙江省杭州市310027) Short-current Combined With Perturbation and Observation Maximum-power-point Tracking Method for Photovoltaic Power Systems ZHANG Chao, HE Xiang-ning (Power Electronics Institute of Zhejiang University, Hangzhou 310027, Zhejiang Province, China) ABSTRACT: The output power of PV module varies with module temperature, solar insolation and loads, so it is necessary to track MPP of the PV array all the time. In past years, many MPP control algorithms were presented to draw maximum power from the solar array. A novel online short circuit current method is presented. This method can track MPP changes rapidly without disturbing PV system. On the basis of this method, P&O(perturbation and observation) method with optimized perturbation step was proposed to reduce the power oscillation around MPP. Simulations and experimental results show that the PV generation system has good steady state and transient characteristics with the proposed MPPT control method. KEY WORDS:photovoltaic; maximum power point tracking; short circuit control; perturbation and observation control 摘要:光伏电池输出功率随外部环境和负载的变化而变化,为充分发挥光伏器件的效能,需采用最大功率点跟踪电路。对于最大功率点跟踪电路的控制已经提出了许多方法,其中短路电流法和扰动观察法因其具有简单有效的优点而得到广泛应用。针对短路电流法的缺点,该文提出一种新的在线短路电流控制方法。该方法在不干扰系统正常工作的情况下,能迅速感知外部环境变化,但该方法效率不高。为充分发挥光伏电池的效能,在线短路电流控制方法的基础上再引入扰动观察法。该文扰动观察法的扰动步长针对最大功率点处稳态特性进行优化,优化后,扰动观察法可有效消除光伏器件输出功率在最大功率点的振荡现象,从而提高系统效率。仿真和实验研究证明,该方法可以快速跟踪外部环境变化,并消除系统在最大功率点的振荡现象。 基金项目:国家教育部博士点基金项目(20050335059).关键词:光伏;最大功率点跟踪;短路电流法;扰动观察法0 引言 光伏发电作为一种具有广阔前景的绿色能源已成为国、内外学术界和工业界研究的热点[1-2]。光伏电池输出功率与外界环境和负载情况有关,为充分发挥光伏电池的功效,需在光伏器件和负载之间串联最大功率点跟踪(maximum power point tracking,MPPT)电路[3-4]。MPPT电路常用的控制方法有固定参数法(如固定电压法、固定电流法)、扰动观察法及增加电导法等[5]。 固定参数法利用在最大功率点工作时光伏器件工作电压、电流与器件开路电压、短路电流的近似比例关系进行控制,此方法只需一个检测参数,控制简单易行,但获取开路电压或短路电流要中断系统正常工作,对系统运行存在干扰,此外所采用的控制关系是近似关系,不能实现最优控制,因此该方法控制精度低,仅适用于小功率场合。扰动观察法根据光伏器件在最大功率点处?P/?U=0的特性进行最大功率点跟踪控制,以左侧为例说明该方法具体工作过程:在系统稳定工作情况下,假设增大最大功率点跟踪电路功率器件的占空比,控制器对占空比调节前后的光伏器件输出功率、输出电压进行采样计算,如果输出功率与输出电压为?P/?U >0,则表明系统工作在最大功率点左侧,应继续增加占空比,直到?P/?U =0,具体工作中,由于扰动观测法需要比较占空比变化前后的功率、电压,因此光伏输出功率会在最大功率点两次反复变化,严重时
实验报告 实验名称:加速步长法 院(系):机电学院 专业班级:机械制造及其自动化 姓名:赵丹 学号:100710431 2013年5 月3 日
实验一:加速步长法实验日期:2013年5 月3日一、实验目的 了解MATLAB的基本运用 了解MATLB在优化中的使用 二、实验原理 加速步长法是利用试探来确定单谷函数的初始搜索区间。其主要思路是:从一点出发,按照一定的步长,试图确定出函数值呈现“高低高”规律的相邻三点。从一个方向试探搜索,如不成功,则沿反方向探索。如方向正确,则加大步长探索。直至最终三点x1x2x3,满足x1 h=-h; x2=x4; f2=f4; else x3=x2; x2=x1; x1=x4; break; end end end left=min(x1,x3); right=x1+x3-left; 四调用执行程序: clc syms t f=t^3-t^2-2*t+1; [left,right]=xiti4_1(f,0,0.1) 执行结果:left = 0.7000 right = 3.1000 实验小结 通过本实验了解了了matlab的基本操作方法,了解加速步长法的原理与基本运用 ANSYS 瞬态动力学分析中的时间步长的选择 对于瞬态动力学分析问题,如何选取合适的时间步长,才能保证得到正确的计算结果呢?这是我们在瞬态动力学分析中需要关注的一个问题。 积分时间步长的选取决定了瞬态动力学问题的求解精度:时间步长越小,则计算精度越高。太大的时间步长会导致高阶模态的响应出错,从而会影响到整体的响应。但是太小的时间步长会浪费计算资源。要得到一个较好的时间步长,应该遵循下述原则: (1)分析响应的频率。 时间步长应该小到可以分析结构的响应。既然结构的动力响应可以看成是一系列模态的组合,时间步长应该可以求解对响应有贡献的最高阶模态。对NEWMARK 积分方案而言,发现可以使用感兴趣结果的最高阶频率的每个周期内取20个点就可以得到大致合适的解答。这就是说, f t 201=? 上式中,t ?为时间步长,f 为所关注系统的最高频率。 如果需要计算加速度,则上述时间步长需要更小一些。 对于HHT 时间积分方法,可以使用同样的时间步长。在使用相同的时间步长和时间积分参数的前提下,HHT 方法比NEWMARK 方法更精确一些。 (2)分析加载的载荷-时间曲线。 时间步长应该足够的小到能跟踪载荷历程。响应一般要比施加的载荷慢半拍,阶跃载荷尤其如此。它需要较小的时间步以便能紧密的跟踪载荷的改变。它应该小到1/180f 会较合适。 (3)分析接触频率。 在包含接触(碰撞)的问题中,时间步长应该小到足以捕捉接触面之间的动力传递。否则,会产生明显的能量损失,而碰撞将不再是理想弹性的。时间步长可以由接触频率得到 c Nf t 1=? m k f c π21= function [sys,x0,str,ts,simStateCompliance] = PO_MPPT_Boost(t,x,u,flag) switch flag, case 0, [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes; case 1, sys=mdlDerivatives(t,x,u); case 2, sys=mdlUpdate(t,x,u); case 3, sys=mdlOutputs(t,x,u); case 4, sys=mdlGetTimeOfNextVarHit(t,x,u); case 9, sys=mdlTerminate(t,x,u); otherwise DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag)); end function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes sizes = simsizes; sizes.NumContStates = 0; sizes.NumDiscStates = 3; sizes.NumOutputs = 1; sizes.NumInputs = 2; sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1; % at least one sample time is needed sys = simsizes(sizes); x0 = [0,0,0.5];%[U I Uref] str = []; ts = 1e-6; simStateCompliance = 'UnknownSimState'; % end mdlInitializeSizes function sys=mdlDerivatives(t,x,u) sys = []; % end mdlDerivatives function sys=mdlUpdate(t,x,u) DU=0.001; %步长 dU=u(1)-x(1); dP=u(1)*u(2)-x(1)*x(2); if dP>0 if dU>0 Uref=x(3)+DU; 变步长梯形求积法计算定积分 1.原理: 变步长求积法的主要思想是利用若干小梯形的面积代替原方程的积分,当精度达不到要求时,可以通过增加点数对已有的区间再次划分,达到所需精度时即可;其中由于新的式子中有原来n点中的部分项,故可以省略一些计算,符合了计算机计算存储的思想。 主要公式:T2n=T n/2+(h/2)*Σf(x k+; 2.C++语言实现方式: 通过每次的T n值和新增的函数值点计算T2n,再通过判断|T n-T2n|的大小来判断是否达到精度要求。 3.源程序如下: #include"" #include"" double f(double x)//预先输入的待积分函数 { double s; s=log(x*x); return(s); } double ffts(double a,double b,double eps) { int n,k; double fa,fb,h,t1,p,s,x,t; fa=f(a); fb=f(b); n=1; h=b-a; t1=h*(fa+fb)/2; p=eps+1; while(p>=eps) { s=0; for(k=0;k<=n-1;k++) { x=a+(k+*h; s=s+f(x); } t=t1/2+h*s/2; p=fabs(t1-t); cout<<"步长n为:"< . 数学与计算科学学院 实验报告 实验项目名称使用精确搜索算法确定步长的最速下降法所属课程名称最优化方法 实验类型算法编程 实验日期 201 班级 学号 姓名 成绩 【实验目的】 (1) 掌握精确搜索算法确定步长的最速下降法; (2) 使用计算机语言表达最优化方法。 【实验原理】 最速下降法又称为梯度法,是1847年由著名数学家Cauchy 给出的。他是解析法中最古老的一种,其他解析方法或是它的变形,或是受它的启发而得到的,因此它是最优化方法的基础。 设无约束问题中的目标函数 f : Rn R1一阶连续可微。 最速下降法的基本思想是:从当前点k x 出发,取函数 f (x)在点k x 处下降最快的方向作为我们的搜索方向k p .由 f (x)的 Taylor 展式知 ()()()() k k k k T k k f x f x tp t f x p o tp -+=-?+ 略去t 的高阶无穷小项不计,可见取()k k p f x =-?时,函数值下降得最多。于是,我们可以构造出最速下降法的迭代步骤。 解无约束问题的的最速下降法计算步骤 第 1 步 选取初始点(0)x ,给定终止误差ε ,令k:=0; 第 2 步 计算 f (k x ),,若‖ f (k x )‖ε ,停止迭代.输出k x . 否则进行第三步 第 3 步 取()k k p f x =-?; 第 4 步进行一维搜索,求k t ,使得 1()(())min (()) k k k k k k f x f x t f x f x t f x +=-?=-? 令,k:=k+1,转第2 步。 由以上计算步骤可知,最速下降法迭代终止时,求得的是目标函数驻点的一个近似点。 【实验环境】 计算机 VC++ 二、实验内容: 【实验方案】 1. 列举例题 2. 手工计算 3. 将计算步骤等实现程序化 4. 实验结果分析 ISSN 1000-0054CN 11-2223/N 清华大学学报(自然科学版)J T singh ua Un iv (Sci &Tech ),2006年第46卷第10期 2006,V o l.46,N o.1021/40 1719-1722 基于自适应步长的直线生成算法 黄斌茂, 张 利 (清华大学电子工程系,北京100084) 收稿日期:2005-07-13 基金项目:国家自然科学基金资助项目(60172027)作者简介:黄斌茂(1981-),男(汉),江西,硕士研究生。通讯联系人:张利,副教授, E-mail:chin azh angli@mail.tsingh https://www.doczj.com/doc/a77006522.html, 摘 要:为了改进计算机图形学中画线算法的效率,提出一种基于自适应步长的直线生成算法和一种集成了对称性、最大公约数和自适应步长的集成算法。由于直线仅包含一种或两种与斜率有关的像素模式,算法利用这一特性,自适应地采用最佳步长,在单次判决中生成多个像素。通过综合使用直线像素的中点对称性、最大公约数性质以及像素模式的有限性等3种相互独立的特性,集成算法在单次判决中可生成更多像素。算法的仿真结果表明:新算法生成直线的效率更高、速度更快。 关键词:Bresenham 算法;自适应步长;对称性;最大公约 数;像素模式 中图分类号:T P 391.4文献标识码:A 文章编号:1000-0054(2006)10-1719-04 Self -adaptive step straight -line algorithms HUA NG Binmao ,ZH ANG Li (Department of Electronic Engineering , T s inghua University ,Beij ing 100084,China ) Abstract :Line draw ing algorithm in computer grap hics sys tems is improved w ith a self-adaptive s tep straight-line algor ith m and an oth er integrated algorithm th at combines self-adaptive step algorithm w ith th e s ymmetr y an d greatest com mon divisor (GCD)-based algor ith ms.Th e self-adaptive step algorithm uses the limited pixel patter ns inherent in line s egments to adaptively determine the best step that corres ponds to the line slope an d then gen erates m ulti-pixels in each judgemen t.T he integrated algorithm utilizes the sym metry,GCD,an d limited pixel patterns and gen erates more p ixels in each https://www.doczj.com/doc/a77006522.html,parisons w ith Bresen ham 's algorithm sh ow th at the integrated algorithms are m ore effective and efficient. Key words :Bresen ham's algorithm ;self-adaptive steps;s ymmetr y; greatest common divisor (GCD);pixel patter n 直线段(简称直线)是图形的基本单元,图形渲染的速度很大程度上取决于直线的生成速度。 Br esenham 算法[1] 是目前使用最为广泛的直线生成算法,它采用整数加减运算,避免了浮点数操作和乘除运算,从而极大地提高了算法的效率。在该算法的 基础上,研究界提出了多种改进算法。其改进思路可分为两类:1)将直线分割成多条短线段,采用并行算法生成直线[2] ;2)通过一次误差判别操作,在一次循环中生成多个像素[312]。 直线上的像素点关于直线中点对称,文[5]利用这一特性,每个循环生成两个像素点。 对端点为S (x s ,y s )及E (x e ,y e )的直线,当 x e -x s 和 y e -y s 的最大公约数r 不为1时,直线上有r 段像素模式相同的线段。文[4]通过在每个循环内生成r 个像素,加速了直线的生成。但当r =1时,该算法比Brensenham 算法效率要低。文[68]采用N 步长(N ≥2)直线生成方法,将八分圆分成多个子区,每个子区有N +1种像素模式,根据直线的斜率可决定其子区归属。该算法每个循环可生成N 个像素。其不足是:每个子区中的N +1种像素模式的初始化开销很大;步长固定,不能采用最佳步长。还有一些研究者结合对称性、多步长、最大公约数提出集成算法[9]。 文[10]简要地提出自适应步长的思想,但未给出推导证明与具体算法;文[11,12]在直线斜率为0< m <0.5时,一次生成多个像素以提高直线的生成效率,但没有注意到直线像素模式关于m =±0.5的对称性。此外,文[11,12]都没有给出算法的仿真结果。 上述各种改进算法的共同点是在每个循环中生成多个像素,但每次生成的像素个数固定,不能自适应地采用最合适的步长。本文利用直线在八分圆中像素模式的对称性,以及任一直线只有一种或者两种与斜率相关的像素模式这一特性,提出一种基于 CHP22.15 时间步长的设定 绘制当前时间数据图的方法: 使用显式非稳态公式或使用的是适应时间步长法,推荐用绘制当前时间或当前时间步长数据图。方法: Solve—Monitors—statistic 在statistics框中选择time或是delta_time 项。 确定与时间有关的求解参数: 一阶或二阶隐式求解方法: Max Iterations per Time Step:当FLUENT用隐式方法求解时,每个时间步长都要迭代。设定了每个时间步长内迭代的最大数值,如果在达到这个数值以前迭代收敛的话,求解过程会提前进入下一个时间步长。 Time Step Size:时间步长大小是t?的数值大小。由于FLUENT是完全隐式,因此没有队时间步长大小的要求。但为了正确模拟瞬态流动,时间步长大小的数量级至少应比系统中正在模拟的最小时间常量要小一个数量级。判断t?的选择的一个好方法是观察FLUENT在每个时间步长内迭代至收敛的次数,理想次数是10到20次,如果次数多于这个数值,则说明时间步长太大了。如果每个时间步长内只有几次迭代,则说明t?应该增大。常见的问题是FLUENT启动很快,而衰减也很快。这样情况下,聪明的办法是开始的5到10个时间步长设的相对较小,然后随着计算过程逐渐增加t?。 对于周期性时间的计算,应该根据时间周期的大小选择时间步长。比如说,对于转子/定子模型,可以在每个叶片通过之间设置20个时间步长。再比如对于涡轮流散的模型,每个周期20个时间步长比较好。 迭代时间步场面板上,默认的时间步长大小是固定的。要想在计算过程中随时修改时间步长大小,则要选adaptive并在adaptive time stepping中设好参数。第22.15.2节中详细讲述该内容。 22.15.2 调整性时间步长 调整性时间步长只有在segregated算法和coupled implicit算法中才能用,coupled explicit 算法不能用。另外,VOF或是分散相模型也不能用。 自动调整时间步长根据对与时间差分方案有关的truncation error截断误差而定,如果截断误差小于指定的允许程度,时间步长大小就要增大,反之,时间步长要减小。 截断误差的估测可以通过对算法的时间差分的预测修正得到。每个时间步长开始时,算法简单、粗略的计算问题的初始值,将它作为该时间步长的初始条件,然后用非线性迭代隐式算法修正,在对预测值和修正值之间的差异以截断误差为标准进行比较,如果达到了截断误差的预期程度,FLUENT就调整时间步长的大小。 参数: 截断误差Truncation Error Tolerance:指定与计算的截断误差相比较的初始值,增大这个值,会使时间步长增大,求解精度降低。反之,则变化趋势相反,但计算所需的时间要变长。对大多数情况,用默认值0.01即可。 结束时间Ending Time:指定计算的结束时间。结束时间不等于时间步乘以固定时间步长长短,应该专门指定它的值。 最大/最小时间步长长短Minimum/Maximun Time Step Size:该项指定时间步长的上下限值。如果时间步长很小,计算要花费的时间和所占空间就高,如果时间步长很大,计算精度就不够。 最大/最小步长改变系数Minimum/Maximum Step Change Factor Limit:限制了每一步时 万方数据 万方数据 万方数据 一种应用于光伏系统MPPT的变步长扰动观察法 作者:朱铭炼, 李臣松, 陈新, 龚春英, ZHU Ming-lian, LI Chen-song, CHEN Xin,GONG Chun-ying 作者单位:南京航空航天大学,江苏,南京,210016 刊名: 电力电子技术 英文刊名:POWER ELECTRONICS 年,卷(期):2010,44(1) 参考文献(5条) 1.欧阳名三;余世杰;沈玉樑一种太阳能电池MPPT控制器实现及测试方法的研究[期刊论文]-电子测量与仪器学报2004(02) 2.Wen-Jung Chiang;Hurng-Liahng Jou;Jinn-Chang Wu Maximum Power Point Tracking Method for the Voltage-mode Grid-connected Inverter of Photovoltaic Generation System 2008 3.LIU Fang-rui;DUAN Shan-xu;LIU Fei A Variable Step Size INC MPPT Method for PV Systems 2008(07) 4.张超;何湘宁短路电流结合扰动观察法在光伏发电最大功率点跟踪控制中的应用[期刊论文]-中国电机工程学报2006(20) 5.徐鹏威;刘飞;段善旭几种光伏系统MPPT方法的分析比较及改进[期刊论文]-电力电子技术 2007(05) 本文链接:https://www.doczj.com/doc/a77006522.html,/Periodical_dldzjs201001008.aspx 2012~2013学年度电气与电子工程学院研究生课程 《太阳能光伏并网发电系统》课程报告 固定电流法与变步长扰动观察法结合的 MPPT算法研究 院系:电气与电子工程学院 专业:应用电子工程系 任课教师: 学生姓名: 学号: 指导教师: 二○一三年五月 ABSTRACT:The output power of PV module is a non-linear function of temperature, solar insolation and loads, so it is necessary to track MPP of the PV array all the time. When the external environment rapidly changes,in order to regulate the PV array operating point near the maximum power point quickly, the online constant-current method to track MPP is utilized at first, and then the variable step P&O is adopted to adjust the PV array operating point to be at the maximum-power point. The simulation of the improved method and common methods show that, contrast to the latter, the former can trace the maximum-power point more quickly, efficiently and accurately, which is concise and easy to implement, and also can reduce the energy loss caused by the oscillation of the operating point about the maximum-power point, thus enhancing the PV system efficiency. KEYWORDS:Photovoltaic panel characteristics; maximum power point tracking; constant current method; variable perturb step perturbation and observation method 摘要:光伏器件输出功率是外部环境、负载的非线性函数,为了充分发挥光伏器件的效能,需采用最大功率点跟踪方法进行控制。当外界环境突变时,采用在线固定电流法进行初步跟踪,调整光伏阵列的工作点到最大功率点附近。在此基础上再使用变步长扰动观察法,使得工作点进一步调节到最大功率点,并有效减少了光伏阵列输出功率在最大功率点的振荡。对该结合方法及相关的MPPT算法分别仿真,结果表明,该方法可以在外界环境剧烈变化下快速、有效、准确地跟踪最大功率点,简明易于实现,同时有效减少在光伏阵列最大功率点附近振荡所带来的能量损失,提高了光伏发电系统的效率。 关键词:光伏电池特性;最大功率点跟踪;固定电流法;变步长扰动观察法 1引言 光伏电池是光伏发电系统电能的来源,光伏电池输出功率是其所受日照强度、器件结温的非线性函数。即使在外部环境稳定的情况下,光伏电池的输出功率也会随着外部负载的变化而变化,只有当外部负载与光伏器件达到阻抗匹配时,光伏器件才会输出最大功率。为了实时从光伏阵列获得最大输出功率,需要在光伏发电系统中实现最大功率点的跟踪控制。通常的实现方法是需根据外部环境和负载情况不断调节光伏器件的工作点使其输出最大功率,我们将此功率调节过程称为最大功率点跟踪(Maximum Power Point Tracking,MPPT)。 MPPT电路常用的控制方法有固定参数法(如固定电压法、固定电流法)、扰动观察法及增加电导法等。各种MPPT控制方法中,固定电流法和扰动观察法因简单有效而较常用,但各自也存在缺陷。本文在分析固定电流法和扰动观察法的基础上,采用了一种固定电流法结合扰动观察法的MPPT控制。在外界环境或负载突变时,采用在线固定电流法将光伏阵列的工作点调整到最大功率点附近,以保证跟踪的快速性。在此基础上,为进一步提高对光伏阵列的利用效率,在最大功率点附近,采用变步长扰动观察法,从而减小系统在最大功率点附近的振荡。 2光伏电池特性 光伏电池单元是非线性器件,它的等效电路模型如图2.1所示。图2.1中的电流源产生光生电流I ph,它的数值由光照强度与温度共同决定。串联电阻R S与并联电阻R P用来表征太阳能电池内部的功率损耗。由于太阳能电池表面的材料的电阻率,当电流经过太阳能板流向外部内路时,其必然为产生串联损耗,故引入串联电阻R S。并联电阻R P表征由漏电流引起的损耗。 二维铸造充型过程数值模拟的特征分数步长法? 鲁统超1,葛亮2 1山东大学数学与系统科学学院, (250100) 2 山东大学数学与系统科学学院, (250100) E-mail :lutc@https://www.doczj.com/doc/a77006522.html, 摘 要:铸造充型过程的数学模型是包括连续性方程和动量方程的偏微分方程组。本文利用分数步长法将动量方程分裂成两部分,对第一个方程采用特征差分法进行处理,对第二个方程结合连续性方程进行处理后得到压力的 泊松方程,用迭代法进行求解,给出了收敛性分析和稳定性条件。 关键词:分数步长;特征差分;收敛性;迭代。 1. 引 言 铸造生产的实质就是直接将液态金属浇入铸型并在铸型中凝固和冷却,进而得到铸件。液态金属的充型过程是铸件形成的第一个阶段。许多铸造缺陷(如卷气、夹渣、浇不足、冷隔及砂眼等)都是在充型不利的情况下产生的。因此,了解并控制充型过程是获得优质铸件的重要条件。但是,由于充型过程非常复杂,长期以来人们对充型过程的把握和控制主要是建立在大量实验基础上的经验准则。随着计算机的发展,铸件充型过程数值模拟才得到广泛应用。 充型过程流场数值模拟的主控方程均为非线性方程。其计算使用有限差分或有限元等数值方法求解质量守恒方程(连续性方程)和动量守恒 方程即Navier-Stokes 方程,以得出流体运动规律。在以前的研究中,Chorin(1968)和Temam(1969)分别独立的提出投影法。1972年由Minnesota 大学的Patankar 与Spalding 提出了simple 算法,这是一个压力修正算法,在以后的研究中又有simplec 方法,Raithby 提出的simplex 方法, Sheng 等提出的simplet 算法。 本文中利用分数步长法的思想将动量方程分裂成两部分,对第一个方程采用特征差分法求解,对第二个方程结合连续性方程进行处理后得到压力的 泊松方程,我们用迭代法进行求解,给出了收敛性分析和稳定性条件。 2. 问题的数学模型 铸造充型过程的模型主要由连续性方程和动量方程组成。 (a) 流体的动量方程 1x u p V u g u t x μρρ ??=???++???r " (2.1) ? 本课题得到教育部高等学校博士点基金资助,编号:20030422049 - 1 - 光伏系统变步长扰动观察法MPPT算法研究 王小昆,胡贤新 (中国矿业大学信电学院,江苏,徐州221116) 摘要:光伏电池阵列输出功率受光照强度和温度变化的影响,因此最大功率点跟踪(MPPT)技术广泛应用于光伏系统中。在所有最大功率点(MPP)控制策略中,扰动观察(P&O)MPPT算法因易实现被广泛应用,然而它的缺点是在稳定工作状态下工作点通过MPP时会导致能量振荡损耗,并且在光照强度或温度发生突变时表现较差的动态响应。在本文中,提出一种改进型变步长扰动观察MPPT算法,此方法依据工作点动态调整步长变化,与传统固定步长方法比较,本文提出的方法能有效地提高MPPT速度和转换效率,通过仿真和实验结果分析,验证了此改进算法的可行性。 关键词:最大功率点跟踪;扰动观察法;变步长 Research on Variable Step Size P&O MPPT Algorithm for PV Systems WANG Xiao-kun,HU Xian-xin (School of Information and Electrical Engineering, China University of Mining and Technology, Xuzhou, Jiangsu 221116, China) Abstract:Maximum power point tracking (MPPT) techniques are employed in photovoltaic (PV) systems to maximum the PV array output power which depends on solar irradiance and temperature. Among all the MPPT strategies,The P&O Maximum Power Point Tracking algorithm is mostly used, due to its ease of implementation. However, its main drawbacks are the waste of energy in steady conditions, when the working point moves across the MPP and the poor dynamic performances exhibited when a step change in solar irradiance or in temperature occurs. In this paper, a modified variable step size P&O MPPT algorithm is proposed, the step size is automatically tuned according to the operating point. Compared with the conventional fixed step size method, the proposed approach can effectively improve the MPPT speed and efficiency simultaneously.A theoretical analysis and the design principle of the proposed algorithm are provided and its feasibility is also verified by simulation and experimental results. Keywords:Maximum power point tracking (MPPT); the Perturb and Observe (P&O); Variable Step Size 1 引言 随着世界能源消耗的不断增加,石油、煤炭等不可再生能源不断枯竭,可再生能源在能源消费中的地位越来越突出,其取之不尽和对自然环境影响较小的特点,得到了广泛的应用,其中太阳能是主要清洁能源之一,主要是光伏发电系统投资成本越来越低,并且技术不断进步、系统运行稳定、维护简单、对环境无污染。光伏发电系统现在主要应用于蓄电池充电、扬水系统、居民生活供电、卫星系统供电等场所[1-2]。 定稿日期:2010-12-11 作者简介:王小昆(1983-),男,安徽巢湖人,硕士研究生,研究方向光伏并网系统及电力电子技术 光伏系统存在两个重要不足,其一电池板发电效率非常低,在低光照强度下表现尤为突出,其二电能的产生随着天气状况变化而产生明显的变化,比如光照强度和温度变化等。 最大功率点跟踪(Maximum power point tracking,简称MPPT)变成了光伏发电系统中的重要组成部分,它能将电池板阵列产生的最大功率传输到逆变系统中,实现效率的最优化。基于控制器复杂程度,所用传感器数量,制造成本和性能有多种不同的MPPT控制方法被相继提出。MPPT算法实现目标是跟踪的快速性和准确性,即在光照强度和温度发生突变时快速响应以及稳定工作时较小振荡。目前常用的方法有恒压法 用FLUENT计算非稳态问题,是不是在计算时必须保证在每个时间步timestep里都要收敛才行,否则计算结果就不对呢也就是说,在iteration选项里,max iteration pertime step设为一个值,比如500,就是如果500次迭代后仍未收敛,进入下一步迭代,那对结果会有什么影响。 对于隐式非定常格式,原则上,每个时间步长内必须保证结果收敛。在fluent 的帮助中就有这样的话:“对于不可压流动,在每个时间步内,不可压解必须迭代直至收敛。”另外,我们回归到fluent内部计算的本源,它实质就是一种差分算法,通过不断逼近来获得真实解,这样我们就不难理解为什么在每个时间步长内需要收敛了。max iteration pertime step 设定的是最大时间步,在单一步长内,如果结果已经收敛,则会自动跳至下一时间进行计算。所以其设定要纵观全局。但对于周期性流动,这种收敛性的要求就相对松动一些。不过你需要多计算几个周期,等计算结果达到对时间的周期状态后,再对结果进行储存。 对于显式非定常格式,在Fluent帮助中这样说:“一定记住,对于显式非定常格式,每一个迭代就是一个时间步。” 如果每个时间步内结果没有得到收敛,则很有可能你所得到的结果是不真实的,但是一个时间步内的不真实性应该不会影响到下一个时间步长内的计算。因为在每一个时间步开时,fluent 都会进行初始化。在单个时间步内,它实际是按照稳态进行计算的。 time step size的设定是根据你的计算需要,一般是你的特征长度(比如说管道的长度)除于特征速度(比如平均速度)的值再小一到两个量级即可,如果你的time stip size太大,计算会提示你的,改小即可。 %利用wolf-powell线性搜索步长 function alpha1=wolfpowell(f,x,x0,d) g=jacobian(f,x); %求函数f的梯度 sigma1=0.25; %给定常数1 sigma2=0.7; %给定常数2 beta1=5; %步长初始值 theta1=0.5; %步长变化比例1 theta2=0.7; %步长变化比例2 %求步长alpha1 if subs(f,x,x0+d)<=subs(f,x,x0)+sigma1*subs(g,x,x0)*d'&&subs(g,x,x0+d)*d'>=sigm a2*subs(g,x,x0)*d' alpha1=1; %满足第一个条件的最大步长 else alpha1=beta1; while subs(f,x,x0+alpha1*d)>subs(f,x,x0)+sigma1*alpha1*subs(g,x,x0)*d' alpha1=theta1*alpha1; end while subs(f,x,x0+alpha1/theta1*d)<=subs(f,x,x0)+sigma1*alpha1/theta1*subs(g,x,x0)*d' alpha1=alpha1/theta1; end end %使步长满足第二个条件 while subs(g,x,x0+alpha1*d)*d'ansys时间步长的确定
扰动观察法
数值分析与算法变步长梯形求积法计算定积分
使用精确搜索算法确定步长的最速下降法
基于自适应步长的直线生成算法
CHP22时间步长
一种应用于光伏系统MPPT的变步长扰动观察法
固定电流法与变步长扰动观察法结合的M算法研究
二维铸造充型过程数值模拟的特征分数步长法
光伏系统变步长扰动观察法MPPT算法研究
Fluent时间步长
wolf-powell算法搜索步长
相关主题
文本预览