高压均质机传动端的设计及运动仿真
本设计设计的是高压均质机动力端主要零件。首先,文章介绍了高压均质机的工作原理。流体在高压状态下通过细小缝隙时,会产生较大的剪切力、撞击力和空穴力,使流体中的固体颗粒破碎为微小颗粒,高压均质机就是利用这一原理工作的。接着,文章参考现有的均质机结构,确定了均质机主要结构参数,然后,按照高压往复泵的设计方法对高压均质机的主要零部件,如传动装置、曲轴、连杆等进行了结构设计。还有液力端泵阀的设计,并对其进行了相应的强度校核。最后,文章介绍了本次设计中还有高压均质机的运动仿真,采用了C语言程序,并对其进行了详细的说明。
绪论
高压均质是一种制备超细液液乳化物或液固分散物的通用设备,被广泛应用与各行业的生产者和科技研领域。例:
一、食品饮料行业:
豆奶、花生奶、松子奶等各种植物蛋白饮料。
核桃露、杏仁露、莲子露、椰子汁等各种悬浮果汁饮料。
酸奶、均质奶、纯牛奶、甜牛奶、乳酸饮料、冰淇淋、豆奶粉等各种乳品和乳制品。
二、制药:
抗生素、各种乳剂、浆液制剂、中药制剂、花粉破碎及各种营养保健液。
三、轻工化工行业:
香精香料、化妆品、乳化硅油、感光剂、增亮剂、高级涂料、颜料、染料等。
四、生物工程技术:
对大肠杆菌、胞进行破碎,撮取其有效成分。
随着人民生活水平的提高,食品工业必将跟上时代的步伐,不仅要求食品本身的营养丰富,还对其质量、口味、外观、保存等提出了高标准,这样必然把食品工业推上一个新高潮。
食品品种繁多,本设计是主要应用于乳品工业中。它是一种特殊的高压泵,用于喷雾干燥设备中,可使液体分散成细微的雾滴,便于干燥成粉状。通过均质的炼乳、冰淇淋、代乳粉,液体中的分散项破裂成细微状态,可减少沉淀,增加粘稠性,口感细腻,并延长存放时间。均质机不仅在乳品工业和冰淇淋生产中得到广泛应用,而且还适用于医药、化工生产中。总之,在我国均质机发挥出的作用越来越大,因此需要人们对其进行深入的研究,以便设计生产。
本设计参考现有的均质机而设计,力求经济、结构合理,但肯定还有许多的不足之处,希望在老师和同学的帮助下,得到进一步的改进。
第1章均质机及其基本参数
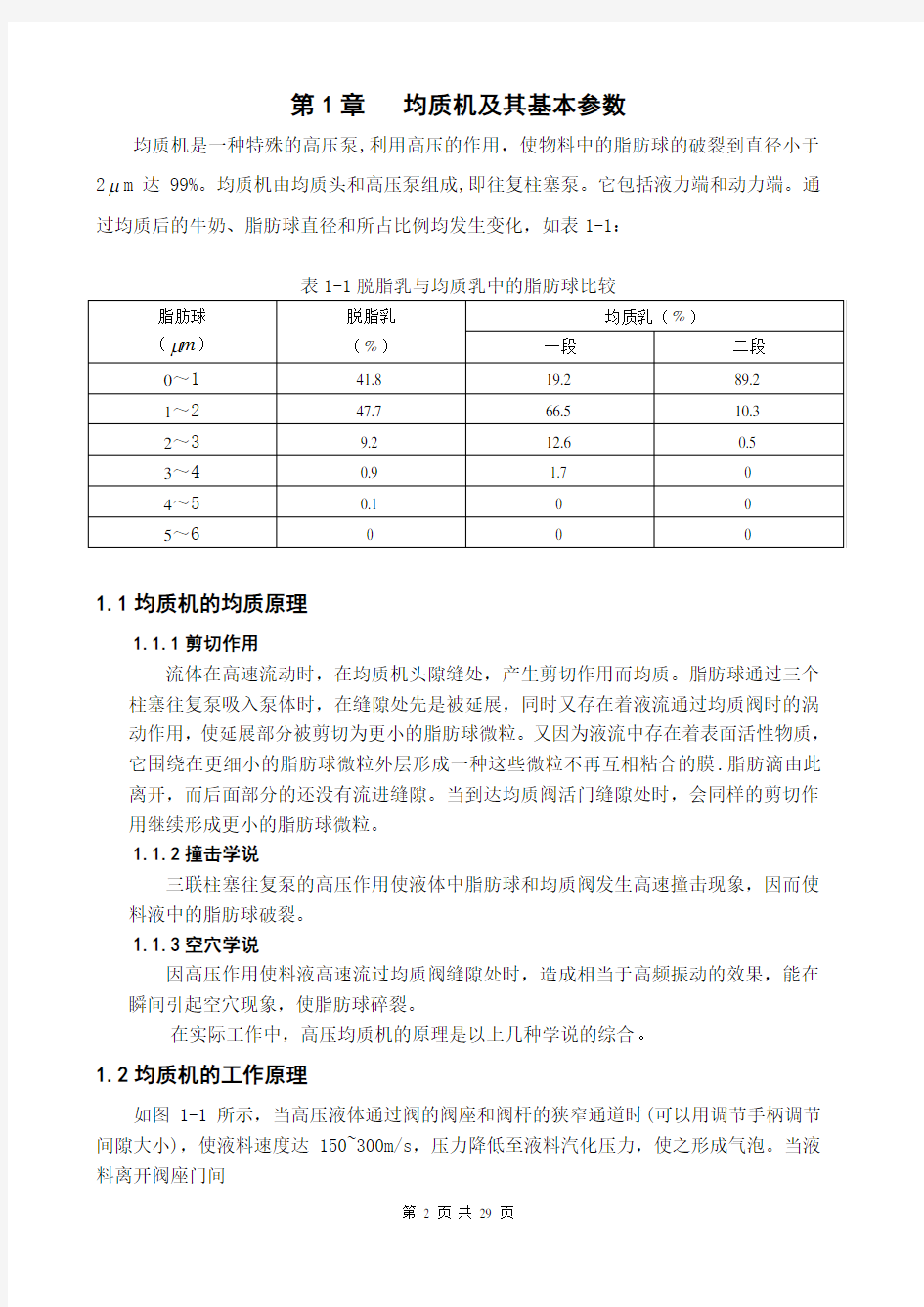
均质机是一种特殊的高压泵,利用高压的作用,使物料中的脂肪球的破裂到直径小于2μm达99%。均质机由均质头和高压泵组成,即往复柱塞泵。它包括液力端和动力端。通过均质后的牛奶、脂肪球直径和所占比例均发生变化,如表1-1:
表1-1脱脂乳与均质乳中的脂肪球比较
1.1均质机的均质原理
1.1.1剪切作用
流体在高速流动时,在均质机头隙缝处,产生剪切作用而均质。脂肪球通过三个柱塞往复泵吸入泵体时,在缝隙处先是被延展,同时又存在着液流通过均质阀时的涡动作用,使延展部分被剪切为更小的脂肪球微粒。又因为液流中存在着表面活性物质,它围绕在更细小的脂肪球微粒外层形成一种这些微粒不再互相粘合的膜.脂肪滴由此离开,而后面部分的还没有流进缝隙。当到达均质阀活门缝隙处时,会同样的剪切作用继续形成更小的脂肪球微粒。
1.1.2撞击学说
三联柱塞往复泵的高压作用使液体中脂肪球和均质阀发生高速撞击现象,因而使料液中的脂肪球破裂。
1.1.3空穴学说
因高压作用使料液高速流过均质阀缝隙处时,造成相当于高频振动的效果,能在瞬间引起空穴现象,使脂肪球碎裂。
在实际工作中,高压均质机的原理是以上几种学说的综合。
1.2均质机的工作原理
如图1-1所示,当高压液体通过阀的阀座和阀杆的狭窄通道时(可以用调节手柄调节间隙大小),使液料速度达150~300m/s,压力降低至液料汽化压力,使之形成气泡。当液料离开阀座门间
的间隙时,其速度降低,压力升高,导致气泡被压破,产生内爆,产生的空穴和高频振动使脂肪球颗粒破碎。此过程中,能量强烈释放,液料形成湍流,冲击冲击流,完成均质过程。
均质料液
第一级调节阀柄
第二级调节阀柄
图1-1双级均质阀工作示意图
1.3均质机的基本参数
1.3.1瞬时流量
理论上,瞬时流量=工作腔容积变化率 如图1-2
图1-2
图1-3双缸泵的无因次流量曲线
图1-4 三缸泵的无因次流量曲线
q = A
t
x
d d =Au=Ar ?φ(u) φ(q)=
?
Ar q
= φ(u) 其中φ(q) -无因次瞬时流量; φ(u)-无因次瞬时速度, φ(u)=
?r u =-(sin ?+2
λ
sin2?)。 衡量流量脉动性的指标为不均匀系数Q δ=
t Q q m ax =Z
A q sin max
单缸泵:Q δB π=3.14 ; 双缸泵:Q δB π/2=1.57 ; 三缸泵:Q δB π/3=1.04 ; 四缸泵:Q δB1.1 ;
可以看出,四缸泵的脉动性反而比三缸泵有所增加,流量曲线如图1-3,图1-4。 1.3.2泵的压力
均质压力对脂肪球大小的影响如表1-2:
表1-2
随着压力的提高,脂肪球颗粒减少,考虑到制造工艺性、经济性,压力不宜太高,所以本机选180 kg f/cm2。
1.3.3均质温度
均质与温度的关系如表1-3
表1-3
表中可以看出,均质最佳温度为65℃。本设计要求料液温度为60~70℃,同时,可以提高密封圈效率。
1.3.4效率
理论流量与实际流量之间有一定的流量损失,即容积损失,它包括四部分:
η,
流体的压缩或膨胀造成的△
V
1
η,
阀在关闭时滞后造成的△
2
V
η,
阀关闭不严造成的泄漏△
3
V
柱塞与密封圈之间的泄漏△4V η, 取V η=1V η+2V η+3V η+4V η =0.8
第2章 总体设计
2.1传动端结构形式的选择
传动端为从动力输入端到十字头为止的部件,包括机体、曲柄、连杆、曲轴、十字头及润滑冷却等辅助设备。
2.1.1曲轴
曲轴为整体浇铸体,材料为QT60-2,本机采用二支点 三拐式。三个曲柄相位角相差120o,曲柄与连杆之间轴瓦材料用20%锡铝合金。
确定曲轴半径时考虑到两个方面的问题.较小时,强度、刚度无法满足,挠度、转角增加;较粗大时,要考虑加工挠性问题。
曲拐的运动顺序为一、三、二。第一曲拐转角1Φ=Φ,第二曲拐转角2Φ=Φ+240,第三曲拐3Φ=Φ+120。这可以使偏角θ大致相等,力求使机械惯性力和惯性力矩得到平衡,减轻对基础的饿挠性载荷。 2.1.2连杆
连杆大头采用剖分式,用特制定位螺栓定位,扣紧螺母防松,小头定位。是浇铸件,材料为QT60-2。连杆体和大小头中开油槽,油孔,来润滑曲柄和十字头。 根据总体结构选λ=r/l=0.0625。 2.1.3轴承
有冲击载荷,适宜选用滚子轴承。 2.1.4十字头
整体铸件,材料ZG35。 2.1.5传动方式选择
采用一级带传动。
2.2液力端结构形式的选择
液力端是从柱塞一直到泵进出口管接头的部件,是介质的过流部分,包括液体缸、柱塞和密封件、吸排液阀组件、缸盖、阀箱盖。
在选择液力端结构形式时,应遵循下述基本要求:
a 过流性能好,水力阻力损失小,为此,液流通道应力求短而直,尽量逃避拐弯和急剧的断面变化;
b 液流通道应利于气体排出,不允许有死区,造成气体滞留。通常,吸入阀应置于液缸体顶部;
c 吸入阀和排出阀一般应该垂直布置,以利于阀板正常起闭和密封;
d 余隙容积应尽可能的小,尤其是对高压短程泵;
e 易损件寿命长,更换方便;
f 制造工艺性好。
2.2.1泵体
卧式三联单作用泵的泵体为一整体式长方体不锈钢块锻造,材料为1Cr18Ni9Ti,其刚性好,工作腔间距小,机加工量小,吸排出阀布置为直通式三通体。其优点为过流性能好,余隙容积较小,结构紧凑,尺寸小,柱塞虽然不可以从液缸前塞处装拆,但T型孔加工工艺性好。
2.2.2柱塞
柱塞材料为3Cr13,表面经高频淬火,再精密加工和磨光,具有等硬度和光洁度的表面,有较高的耐磨性和防腐性。因为直径小,采用实心结构,加工简单。为不使柱塞发热,保证设备正常运转,柱塞上冷却水不可断。柱塞与十字头之间采用平面连接,结构简单,加工方便,易于装拆。
2.2.3均质阀
均质阀借调整螺旋弹簧对阀心的压力,得到调整流体压力的作用。在双级均质阀中,第一级流体压力为18MPa,主要使脂肪球破碎,第二级压力减至2.7MPa,主要使脂肪球均匀分散。
本机用手动轮直接控制压力,操作方便,体积减小。
均质头制造成两面均可使用的圆柱形结构,加工方便,使用寿命长。
2.3确定泵的主要结构参数
2.3.1活塞平均速度U
m
的选择
U
m
的大小直接影响泵各运动副零部件的摩擦和磨损,特别是对柱塞及其密封的影
响尤为显著。U
m
过大则摩擦和磨损严重,会造成泄漏,流量下降,排出压力也不能达
到额定值。U
m
过小则液力端径向尺寸增加,传动端受力也增加从而使泵的总体尺寸和
重量增加。一般可根据经验公式得到U
m
的定量选取范围:
U
m = K
t
N4.0
ez
m/s
式中 U
m
—柱塞平均速度,m/s;
K
t
—统计系数,液压机用三联或多联机动泵一般为0.21~0.70;
N
ez
—折合成单联单作用泵的有效功率,kw。
摘要 汽车雨刮器,是一个很小却又不容忽视的汽车部件,它能擦亮汽车的挡风玻璃,使司机的视线更加清晰。其功能是将玻璃上的雨水、尘埃、泥污刮净,以获得清晰的视野,保证行车安全。有的国家已将雨刮器的技术状态列入车辆年检项目。 本设计要求进行轿车雨刮器部件尺寸的设计,求解刮扫面积,电机选型,电路分析,利用ADAMS软件进行运动分析,获得运动的轨迹和速度,并用Pro/E绘出三维模型。 运用三维建模软件Pro/E与动力学仿真软件ADAMS建立雨刮器模型,并进行运动仿真,分析雨刮器的运动曲线,对雨刮器做进一步的设计,力求使刮刷区域进一步增大,为生产实际提供理论参考。 关键词:雨刮器;间歇电路控制;虚拟设计;ADAMS;Pro/E
ABSTRACT Windscreen wiper is a small part of automotive but can not be ignored. It can polish the windscreen so that the driver's attention will be more clearly. Its function is to wash the glass to obtain a clear field of vision and ensure the traffic safety. Some countries have had the state of wiper technology projects included into the annual inspection of vehicles. My design requirements are to design the size of the wiper parts in the car, solving the linked scan area, motor selection, circuit analysis, motion analysis using ADAMS software, trajectory and speed of access to and using Pro / E draw three-dimensional model. The use of three-dimensional modeling software, Pro/E, and dynamic simulation software, ADAMS, to establish a model of the wiper, simulate the full motion, analyze the movement curves of wiper, make a further design to the wiper , increase the scratch brush area further , and provide a theoretical reference for the actual production. Key word: Wiper; Intermittent Control Circuit; Virtual Design; ADAMS; Pro/E
抽油机的开题报告 抽油机是开采石油的一种机器设备,俗称“磕头机”,通过加压的办法使石油出井,常见抽油机即游梁式抽油机是油田广泛应用的传统抽油设备,通常由普通交流异步电动机直接拖动。 一、课题的意义。 抽油机的产生和使用由来已久,迄今已有百年历史。应用最早,普及最广的属常规型游梁式抽油机,早在140年前就诞生了,至今在世界各产油国中仍占绝对优势。其结构简单、可靠耐用、易损件少、操作简单、维修方便、维护费用低,使其经久不衰。然而,随着油田的不断开发,要求抽油机具有长冲程、大负载、能耗低、体积小、重量轻等性能特点来满足日益发展的油田开发的需要。 游梁式抽油机井数量多,其工作性能,特别是节能性能直接影响采油成本。在采油成本中,抽油机电费占30%左右,年耗电量占油田总耗电量的20%——30%,为油田电耗的第2位,仅次于注水。游梁式抽油机抽油系统的总效率在国内一般地区平均只有%——23%,先进地区至今也不到30%,可见降低抽油系统高能耗的迫切程度与难度。 自动调节平衡式抽油机的结构特点决定了其节能特性,具有平衡效果好、光杆最大载荷减小、节能效果好等特点。与同级常规抽油机相比,所配备电动机功率可小20%;以相同挂泵深度
条件下油井每度电的出油量相比,比常规抽油机节约能耗35%左右。美国前置型抽油机比常规型抽油机节能31.9%~39.60%,我国该型机比常规型抽油机节能34.9%。因此,完善和发展游梁式抽油机设计理论,研制节能效果显著的节能型游梁式抽油机对于抽油机井节能降耗、提高举升系统的经济效益和我国石油工业发展具有重要的实际意义和极大的深远影响。 二、国内外发展现状及方向。 在世界范围内,研究与应用抽油机已有100多年历史。在百余年的采油实践中,抽油机发生了很大变化。特别是近20年来,世界抽油机技术发展较快,先后研发了多种新型抽油机。抽油机的各项技术经济指标达到了有史以来的最高水平。目前,世界上生产抽油机的国家主要有美国、俄罗斯、法国、加拿大和罗马尼亚等。美国石油学会APISpec11E《抽油机规范》中规定,抽油机共有77中规格。美国Lufkin公司生产B,C,M,A等四种系列抽油机:B系列游梁平衡抽油机8种规格;C系列曲柄平衡抽油机64种规格;M系列前置式抽油机46种规格;A系列前置式气动平衡抽油机26种规格。 俄罗斯生产13种规格游梁抽油机。法国Mape公司生产种规格曲柄平衡游梁抽油机以及立式斜井抽油机和液缸型抽油机。加拿大生产液、电、气组合一体式HEP抽油机。罗马尼亚按美国API标准生产51种规格的游梁抽油机,35种规格的前置式抽油机及前置式气动平衡抽油机。目前,世界上抽油机最大下泵深度
摘要 本设计设计的是高压均质机动力端主要零件。首先,文章介绍了高压均质机的工作原理。流体在高压状态下通过细小缝隙时,会产生较大的剪切力、撞击力和空穴力,使流体中的固体颗粒破碎为微小颗粒,高压均质机就是利用这一原理工作的。接着,文章参考现有的均质机结构,确定了均质机主要结构参数,然后,按照高压往复泵的设计方法对高压均质机的主要零部件,如传动装置、曲轴、连杆等进行了结构设计。还有液力端泵阀的设计,并对其进行了相应的强度校核。最后,文章介绍了本次设计中还有高压均质机的运动仿真,采用了C语言程序,并对其进行了详细的说明。 关键词:高压均质机食品机械均质阀
目录 摘要 (1) 绪论 (4) 第一章均质机及其基本参数 (5) 1.1均质机的均质原理 (5) 1.2均质机的工作原理 (5) 1.3均质机的基本参数 (6) 第二章总体设计 (9) 2.1传动端结构形式的选择 (9) 2.2液力端结构形式的选择 (9) 2.3确定泵的主要结构参数 (10) 2.4原动机的选择 (12) 第三章动力端的设计计算 (14) 3.1传动装置的设计 (14) 3.2曲轴的设计 (15) 3.3连杆与其轴瓦 (15) 3.4十字头 (16) 第四章液力端零部件设计 (16) 4.1泵阀设计 (16) 第五章运动仿真 (20) 5.1 C语言程序简介 (20) 5.2传动端运动及程序 (20)
设计小结 (32) 致谢 (33) 参考资料 (34)
绪论 高压均质是一种制备超细液液乳化物或液固分散物的通用设备,被广泛应用与各行业的生产者和科技研领域。例: 一、食品饮料行业: 豆奶、花生奶、松子奶等各种植物蛋白饮料。 核桃露、杏仁露、莲子露、椰子汁等各种悬浮果汁饮料。 酸奶、均质奶、纯牛奶、甜牛奶、乳酸饮料、冰淇淋、豆奶粉等各种乳品和乳制品。 二、制药: 抗生素、各种乳剂、浆液制剂、中药制剂、花粉破碎及各种营养保健液。 三、轻工化工行业: 香精香料、化妆品、乳化硅油、感光剂、增亮剂、高级涂料、颜料、染料等。 四、生物工程技术: 对大肠杆菌、胞进行破碎,撮取其有效成分。 随着人民生活水平的提高,食品工业必将跟上时代的步伐,不仅要求食品本身的营养丰富,还对其质量、口味、外观、保存等提出了高标准,这样必然把食品工业推上一个新高潮。 食品品种繁多,本设计是主要应用于乳品工业中。它是一种特殊的高压泵,用于喷雾干燥设备中,可使液体分散成细微的雾滴,便于干燥成粉状。通过均质的炼乳、冰淇淋、代乳粉,液体中的分散项破裂成细微状态,可减少沉淀,增加粘稠性,口感细腻,并延长存放时间。均质机不仅在乳品工业和冰淇淋生产中得到广泛应用,而且还适用于医药、化工生产中。总之,在我国均质机发挥出的作用越来越大,因此需要人们对其进行深入的研究,以便设计生产。 本设计参考现有的均质机而设计,力求经济、结构合理,但肯定还有许多的不足之处,希望在老师和同学的帮助下,得到进一步的改进。
公司 标准操作规程编号:STD-SOP-EM-034-00题目均质机使用维护与保养规程颁发部门分析测试中心 制定日期 审核日期 批准日期 分发分析测试中心研发部生产部 目的:建立均质机使用、维护与保养规程 范围:均质机 职责:分析测试中心对本规程的实施负责 正文: 1.技术参数 1.1最少处理量:200ml; 1.2允许工作温度:在90℃以内。 1.3粉碎颗粒直径:0.01~2um; 1.4最大工作压力:80MPa;连续工作压力:64MPa以内。 2.开机前准备 2.1润滑。打开机箱两侧箱盖,在玻璃杯内注满润滑油,并调节油杯上的针型阀螺母,使油杯每分钟滴油3~5滴。 2.2泄压。按逆时针方向松开高压阀(相对地面的位置高,与物料筒同在直线)和低压阀手轮(相对地面的位置低,与物料筒成直角),并分别松开两个阀门的中心螺母。 2.3加料。把物料筒下面的三通阀手柄(入料开关)拨到垂直向上的位置,往物料筒加入约1/2~2/3的水。 2.4接好压力表。顺时针拧紧压力表开关,使之接好。 2.5出料控制。把出料口的三通阀手柄(出料开关)拨到垂直向上的位置(向上)。
3调压清洗 3.1开机。打开电源开关,待“U”型管出水稳定后,调压。 3.2设定压力 3.2.1初调压。顺时针方向缓慢转动高压阀手轮,使压力表指示在2MPa,即一小格。 3.2.2调整低压阀。顺时针方向缓慢转动低压阀手轮,使压力表指示在10MPa,拧紧手轮螺母,固定位置。 3.2.3定压。再次转动高压阀手轮,直到压力表指示在工作所需压力(一般在20 MPa)。卸去压力表的压力,然后重新拧紧压力表的开关,再微调高压轮,使压力达到所需的压力,拧紧高压轮中心的螺母。 3.2.4均质水(物料)清洗管路。把出料开关拨至水平位置(向下),排水。 3.3排去清洗水。排出的水干净后,依次松开高压阀和低压阀手轮(约一圈),松开压力表开关,关闭电源,排尽料斗和管道内的水。 4.开机均质物料(方法同“3”) 4.1拧紧压力表开关,出料开关向上拨,放入物料,打开电源开关。 4.2“U”型管对准物料筒,循环物料调试均质工作。 4.3按上述“3.2”项下操作进行试验。 4.4均质物料。调好压力后,出料开关向下拨,开始均质粉碎。 4.5再清洗。物料粉碎完毕后(料斗中必须剩有物料),加入热水,清洗料斗内壁及管道。 4.6排(清洗用的)水。排出的水干净后,依次松开高压阀和低压阀手轮(约一圈),松开压力表开关,关闭电源,排尽料斗和管道内的水。 5.注意事项及维护保养: 5.1机器运行过程中,如物料粉碎或清洗,料斗中不能为空。 5.2调节压力时,转动手轮的动作务必小心缓慢;如压力调节过大应反方向调回。 5.3机器连续工作时,取轻负荷工作为宜,通常低压小于15MPa,高压小于64MPa。
四川文理学院 机械工程及自动化专业毕业论文选题指南 课题的选择: 1、毕业设计(论文)课题的选择应与机械专业方向及专业岗位群需求紧密结合,学生可结合企业生产、管理、服务实际情况及自己的兴趣爱好,在指导教师的指导下完成毕业设计(论文)选题及毕业设计(论文)。 2、在掌握文献资料的基础上,做好实际调查研究。 3、学生根据已掌握的资料,针对已选择课题进行分析、论证,提出独立见解,在指导教师指导下完成毕业设计(论文)。 毕业设计(论文)部分参考选题方向: (一)机械设计类毕业设计选题目录: 英寸钢管热浸镀锌自动生产线设计 矿用挖掘机斗杆结构有限元分析 吨悬挂悬挂提升机及传感器 米安全钻机 桥式起重机控制线路设计 数控激光切割机XY工作台部件及单片机控制设计 普通货车制动器设计 08.“包装机对切部件”设计 机架现场扩孔机设计 型泥浆泵曲轴箱与液力端特性分析、设计 地下自卸汽车工作、转向液压系统 型仿型切割机 Ⅱ型固定式带式输送机的设计 Ⅱ型皮带机设计 外圆滚压装置设计 型工程钻机 型双动拉伸压力机的设计 门式起重机总体 型凝汽式汽轮机调节系统的设计 插秧机及其侧离合器手柄的探讨和改善设计 控制电梯 切割机 型直切机的设计 锤片粉碎机设计 推料装置 中三维建模部分CAI制作 的三维CAD设计和CAM自动编程 应用模块课件的设计与制作
板料折弯机 型滚动轴承压装机设计 小型泥浆泵的结构设计 双出风口笼形转子选粉机 压装机整机液压系统设计 型轮式装载机 35.板材送进夹钳装置 36.棒料切割机 37.笔记本电脑主板装配线(输送带) 及其主要夹具的设计 38.拨叉加工自动线设计 39.播种机设计 40.插秧机系统设计 41.茶树重修剪机的开发研究 42.柴油机数字化快速设计系统中实例库的建立 43.柴油机专用换向阀工艺结构设计 44.铲平机的设计 45.常规量检测与控制工程专业综合实验设计 46.车载装置升降系统的开发 47.城镇污水处理厂设计 48.冲击回转钻进技术 49.抽油机机械系统设计(常规型) 50.出租车计价器系统设计 51.大型水压机的驱动系统和控制系统 52.大型制药厂热电冷三联供 53.大直径桩基础工程成孔钻具 54.带式输送机传动滚筒的防滑处理 55.带式输送机传动装置设计 56.带式输送机自动张紧装置设计 57.单轨抓斗起重机设计 58.弹簧CAD软件的开发 59.地下升降式自动化立体车库 60.电动自行车调速系统的设计 61.电脑主板回焊炉及控制系统设计 62.复合化肥混合比例装置及PLC控制系统设计 63.电液比例阀设计 64.钉磨机床设计 65.多功能自动跑步机(机械部分设计) 66.二级电液比例节流阀 67.钢筋调直机 68.钢筋弯曲机 69.钢筋弯曲机设计及其运动过程虚拟 70.隔水管横焊缝自动对中装置 71.隔振系统实验台总体方案设计 72.工程钻机的设计
《基于ProE的液压挖掘机工作装置运动仿真毕业设计(论文)word格式》
基于Pro/E的液压挖掘机工作装置运动仿真 近年来,集挖掘和装载功能于一体的液压挖掘机在基础建设和民用建筑建设中的使用与日俱增。由于液压挖掘机的工作条件比较恶劣,工作装置故障较多,造成整机工作可靠性较差,因此挖掘机的可靠性和最优化设计成为国产挖掘机设计的重点和难点。 本文以某国产22t挖掘机为例,探讨在Pro/E软件环境下,对挖掘机工作装置进行三维实体建模、虚拟装配、运动仿真与动态模拟,为挖掘机物理样机的制造、新机型设计方案的评估提供有效参考数据。 1、挖掘机虚拟样机的建立 1.1挖掘机三维零件模型的建立 一般来说,在Pro/E软件环境下,机械系统的三维建模应该严格按照设计构思或者前期图纸为依据进行,尽量保持三维图形数据的完整和正确性。由于本文将进行挖掘机虚拟样机的动力学分析和工作装置的有限元分析,因此此次建模原则是:挖掘机工作装置建模尽量细化,包括动臂、斗杆等的内部加强筋等需详细建模,而除工作装置以外的部件,在建模时则尽量简化,比如回转平台、行走装置等只是勾画出外部形状,而内部细节并未详细绘制,但在动力学分析时,其转动惯量、质量等依据设计数据进行。建立挖掘机工作装置虚拟样机的过程如图1所示。 1.2挖掘机虚拟样机的装配
所建立的某国产22t液压挖掘机的虚拟样机模型如图2所示。 在进行虚拟样机装配之初,采用按照挖掘机各铰接点位置装配,结果发现效率低下,而且装配的精度很低,且在最后连杆装配时,出现无法约束的情况。后来,改用“连接”约束方式:动臂和回转平台的连接、动臂与斗杆的连接、斗杆与铲斗的连接、动臂油缸缸筒与转平台的连接、连杆与斗杆的连接、动臂油缸活塞杆与动臂的连接等均采用“销轴”约束;各油缸活塞杆与油缸缸筒的连接、摇杆与铲斗的连接、连杆与摇杆的连接采用“圆柱”约束;其它刚性零件(斗齿、驾驶室等)采用刚性连接中的“匹配”和“插入”约束。这种虚拟装配方法不需要移动连杆、摇杆和铲斗拼凑装配,工作量小、效率高,也易于达到装配要求。 图1 挖掘机工作装置虚拟样机的建模过程(按工艺流程)
文件编号:RHD-QB-K6197 (操作规程范本系列) 编辑:XXXXXX 查核:XXXXXX 时间:XXXXXX 均质机操作规程标准版 本
均质机操作规程标准版本 操作指导:该操作规程文件为日常单位或公司为保证的工作、生产能够安全稳定地有效运转而制定的,并由相关人员在办理业务或操作时必须遵循的程序或步骤。,其中条款可根据自己现实基础上调整,请仔细浏览后进行编辑与保存。 1.开机前检查润滑油的油位和油质,油位应在油眼标线以上,油质不能出现乳白色,检查各部位是否紧密,紧固松动部位。 2.检查冷却水管是否畅通。 3.检查电动机转向,发现错误调整后方可投入生产。 4.泵体内无料或水时:柱塞冷却水没有或者不足时;润滑油不到位或变质时严禁开机运转。 5.开启冷却水,喷口水量以积水量低于骨架密封圈为准。 6.开启进料阀、出料阀,按下启动按钮,再无压
力状态下运转三分钟,让设备各部件进入润滑状态,同时使泵体充分进料将泵体内空气排尽。 7.加压先将高压手轮顺时针方向旋转至压力表指针点动,然后按照先低压后高压的顺序调整所需要的工作压力(根据工艺要求确定)。 8.关机,按照开机逆向先放松高压,后放松低压,然后用清洗液或水通入泵体无压力旋转10分钟左右达到泵内清洗的目的,注意手轮反转不宜太多,一圈为宜否则会损坏轮内顶杆的密封圈。 9.按下停止按钮,切断电源。 10.机器运转中,严禁用任何工具调节柱塞密封的紧定螺钉。 11.操作者应注意观察压力表、电流表示数及电机、柱塞、管件等,如发现异常声音、温升、泄露等,应及时通知维修人员处理,严禁带病运转。
这里写地址或者组织名称 Write Your Company Address Or Phone Number Here
(1)机械加工 机械加工设备主要有车床、钻床、镗铣床、磨床、滚齿机等。 减速箱加工生产工艺流程: 根据公司生产计划,进行原材料及外购外协件采购,外购外协件经质量检验合格后入库,原材料经检验入库后,根据生产需要进行加工制造,其成品经检验合格后入库。所有入库外购外协件、自制成品件出库后转入装配车间,按装配工序进入装配,装配完成经检验合格后入库。 产品零部件、配件机械加工生产工艺流程: 根据公司生产计划,进行原材料采购,经质量检验合格后入库,原材料出库后转入机械加工车间,按加工工序进入机床加工,加工完工经检验合格后,入库存放,待发货或者由下道生产环节领用。 图2-1 减速箱生产工艺流程图 (2)油套管加工 油套管加工包括油套管加工和接箍生产。 油套管生产工艺流程: 管材经过漏磁探伤机探伤,合格产品依次经数控管螺纹车床进行机械加工,检验合格备用;接箍坯料由数控管螺纹车床进行螺纹加工,
检验后经漏磁探伤机探伤,合格后打标;接下来接箍拧接机将管材与接箍连接,检验合格后用打标机进行打标,经过静水试压机进行压力检测(水压为0~70MPa,管径不同压力不同),测长称重,管两端上保护环,用自动刷漆机在管外壁均匀涂刷环氧沥青防腐漆,后进行喷标,最后成品检验合格后打包,放到产品存放区。 油管、套管生产工艺流程见图2-2。 图2-2 油套管加工工艺流程图 (3)抽油机制造 主要生产设备为数控切割机、仿形切割机、锯床、组装焊接台架、电焊机等。 抽油机生产工艺流程: 根据公司生产计划,进行原材料及外购外协件采购,经质量检验合格后入库,原材料出库后转入机械加工工序,加工完工后,转入铆焊组装工位进行组焊、装配,外购外协件出库后转入组装工序,整机装配完成后整机试机,合格后入库。 工艺流程见图2-3。
意大利Niro-Soavi高压均质机操作使用说明 (型号:NS100L) 一、试验操作规程 1.操作前连接电源,打开压力表“on”,数字应该显示为“0”。 2.试验前将蒸馏水倒入漏斗中。 3.打开开关打开开关,观察出口是否有水流出,若无水流出 或很少,通常的原因是有“气泡”,可采用以下方法解决,首先,挤压漏斗导管,同时上提漏斗,观察是否有气泡涌出,若故障依旧,需使用特殊工具拔出进料阀。 4.调节压力首先,调节二级均质阀,顺时针缓慢转动,当压 力表显示40-150bar时,停止转动,压力值稳定后,调节一级均质阀,顺时针缓慢转动,当压力表显示所需压力时,停止观察。 5.添加样品所需压力调节稳定后,等漏斗中的水流至底部时, 加入100-300ml样品,待样品也流至底部时,将样品全部倒入,保持漏斗始终有样品,同时,出口接均质后的样品。 6.试验结束后首先,调节一级均质阀,逆时针缓慢转动,压 力显示为二级均质阀压力时,继续逆时针转动半圈即可停止,然后,调节二级均质阀,逆时针缓慢转动,调节至“0”。 注意:高压均质机的工作压力较高时,设备工作压力可达1500bar。如果使用时,直接加压至最高工作压力1500bar,或者工作压力直接卸荷至0bar,必然对设备,特别是均质阀处产
生大的压力冲击,将会严重损伤设备,并降低设备使用寿命,甚至发生设备损坏等事故。 二、操作后清洗消毒 在压力是“0”的条件下,加入含量75%的乙醇,清洗1-2遍,然后,蒸馏水清洗1-2遍以上。漏斗和出口管可拆卸清洗。 每次清洗时,观察清洗液流出的颜色,可根据实际情况增加水洗次数,出现其他异常情况,请及时联系我公司业务员。 三、注意事项 1.试验样品需为液体样品。 2.放置均质机的工作台必须是平面,同时,设备四周至少要有 30cm的距离。禁止设备顶部放置任何物品。 3.试验过程中,漏斗必须有物料,保持连续,禁止出现空转现 象。 4.不可使用含氮,含碘的消毒剂清洗,避免腐蚀设备不锈钢部 分。 5.出现其他异常情况,请及时联系我公司专业人员。
目录 摘要 (1) 第一章机械手设计任务书 (2) 1.1毕业设计目的 (2) 1.2本课题的内容和要求 (2) 第二章抓取机构设计 (4) 2.1手部设计计算 (4) 2.2腕部设计计算 (7) 2.3臂伸缩机构设计 (9) 第三章液压系统原理设计及草图 (11) 3.1手部抓取缸 (11) 3.2腕部摆动液压回路 (13) 3.3小臂伸缩缸液压回路 (14) 3.4总体系统图 (15) 第四章机身机座的结构设计 (16) 4.1电机的选择 (17) 4.2减速器的选择 (18) 4.3螺柱的设计与校核 (18) 第五章机械手的定位与平稳性 (20) 5.1常用的定位方式 (20) 5.2影响平稳性和定位精度的因素 (20) 5.3机械手运动的缓冲装置 (21) 第六章机械手的控制 (22) 第七章机械手的组成与分类 (23) 7.1机械手组成 (23) 7.2机械手分类 (25) 第八章机械手Solidworks三维造型 (26) 8.1上手爪造型 (27) 8.2螺栓的绘制 (31) 毕业设计感想 (36) 参考资料 (37)
送料机械手设计及Solidworks运动仿真 摘要 本课题是为普通车床配套而设计的上料机械手。工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。 本课题通过应用AutoCAD 技术对机械手进行结构设计和液压传动原理设计,运用Solidworks技术对上料机械手进行三维实体造型,并进行了运动仿真,使其能将基本的运动更具体的展现在人们面前。它能实行自动上料运动;在安装工件时,将工件送入卡盘中的夹紧运动等。上料机械手的运动速度是按着满足生产率的要求来设定。 关键字机械手,AutoCAD,Solidworks。 全套图纸,仿真,加153893706
结构设计运动仿真分析 招生对象 --------------------------------- 参与运动机构设计的相关工程师和研发人员。 【主办单位】中国电子标准协会 【咨询热线】0 7 5 5 – 2 6 5 0 6 7 5 7 1 3 7 9 8 4 7 2 9 3 6 李生【报名邮箱】martin#https://www.doczj.com/doc/a418119755.html, (请将#换成@) 课程内容 --------------------------------- 课程背景 本课程是讲述计算机仿真技术在运动机构设计中的应用。 培训对象 参与运动机构设计的相关工程师和研发人员。 培训目的 1. 掌握结构仿真的基本理论 2. 掌握结构仿真软件的建模与导入CAD模型 3. 具备分析运动机构动力学问题的能力 课程时长 18课时(6课时/天) 课程大纲 1. 结构仿真基础 1.1 结构仿真的分类与用途 1.2 运动机构中涉及的结构仿真 1.3 本培训中涉及的基础理论 2. 运动机构模型的建立 2.1 导入CAD模型 2.2 CAE软件内几何建模 2.3 部件材料和属性 2.4 部件连接的处理 2.5 模型简化策略 2.6 模型修改
2.7 参数化建模 3. 运动机构模型的计算 3.1 载荷与边界条件 3.2 求解设置 3.3 提交计算 4. 计算结果分析 4.1 导入结果 4.2 查看云图数据 4.3 查看曲线数据 5. 应用实例讲解 6. 上机操作 讲师介绍 --------------------------------- 郭老师 承担主要项目: 1. 家用空调仿真实验室。用培训加项目实战的方式,为海尔创建仿真实验室。 2. 垂直轴风力发电机结构强度校核。对垂直轴风力发电机进行强度和振动分析。 3. 止回阀性能验证。对核电厂风道中的止回阀进行安全性验证。 4. 瓶盖开裂分析。分析并解决市场上瓶盖开裂的问题。 5. 商用空调海运外损分析。分析大型商用空调海运变形的原因,并进行结构加强。 6. 燃气热水器包装设计。为美的进行包装优化设计,解决跌落测试难题。 7. 波轮/滚筒洗衣机包装设计。为海尔洗衣机进行优化设计,完成降低外损和成本的目标。************************************************** 【温馨提示】:本公司竭诚为企业提供灵活定制化的内部培训和顾问服务,培训内容可根据客户的需要灵活设计,企业内部培训人数不受限制,培训时间由企业灵活制定。顾问服务由中国电子标准协会顶尖顾问服务团队组成,由专人全程跟进,签约型绩效考核顾问服务效果,迅速全面提升企业工艺技术水平、产品质量及可靠性、成本节约!
(1)机械加工 机械加工设备主要有车床、钻床、镗铣床、磨床、滚齿机等。 减速箱加工生产工艺流程: 根据公司生产计划,进行原材料及外购外协件采购,外购外协件经质量检验合格后入库,原材料经检验入库后,根据生产需要进行加工制造,其成品经检验合格后入库。所有入库外购外协件、自制成品件出库后转入装配车间,按装配工序进入装配,装配完成经检验合格后入库。 产品零部件、配件机械加工生产工艺流程: 根据公司生产计划,进行原材料采购,经质量检验合格后入库,原材料出库后转入机械加工车间,按加工工序进入机床加工,加工完工经检验合格后,入库存放,待发货或者由下道生产环节领用。 生产工艺流程见图2-1 图2-1减速箱生产工艺流程图 (2)油套管加工 油套管加工包括油套管加工和接箍生产。 油套管生产工艺流程: 管材经过漏磁探伤机探伤,合格产品依次经数控管螺纹车床进行 机械加工,检验合格备用;接箍坯料由数控管螺纹车床进行螺纹加工,
检验后经漏磁探伤机探伤,合格后打标;接下来接箍拧接机将管材与接箍连接,检验合格后用打标机进行打标,经过静水试压机进行压力检测(水压为0?70MPa管径不同压力不同),测长称重,管两端上保护环,用自动刷漆机在管外壁均匀涂刷环氧沥青防腐漆,后进行 喷标,最后成品检验合格后打包,放到产品存放区。 油管、套管生产工艺流程见图2-2。 图2-2油套管加工工艺流程图 (3)抽油机制造 主要生产设备为数控切割机、仿形切割机、锯床、组装焊接台架、电焊机等。 抽油机生产工艺流程: 根据公司生产计划,进行原材料及外购外协件采购,经质量检验合格后入库,原材料出库后转入机械加工工序,加工完工后,转入铆焊组装工位进行组焊、装配,外购外协件出库后转入组装工序,整机装配完成后整机试机,合格后入库。 工艺流程见图2-3
轿车雨刮器结构设计与运动仿真设计
本科学生毕业设计 轿车雨刮器结构设计与运动仿真
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
UG NX运动仿真应用于机械结构设计 作者:凯 1 引言 NX是计算机辅助设计、制造和分析软件,即CAD/CAM/CAE集成工程软件系统,具有强大的设计、加工、分析能力。为汽车、机械、航天、航空、家电、医疗仪器和工模具等工业的生产提供了有力软件工具。 传统机械设计中。设计者仅仅是做出零件的二维或二维的装配图,无法准确地预测出机构在运行过程中各零件是否干涉、驱动力是否满足、运动部件的行程能否达到要求等细书问题。设计者对机构在运转中的情况停留在理论计算以及自己对机构的分析评估,在此条件下设计的机构不免会存在各种隐患和漏洞。制造完成的机构在运行中往往面临各种问题,可能需要对机构某部件再次进行设计或改进,影响了工作效率。 在机械设计过程中引入运动仿真功能可以直接避免上述种种问题。设计者可对仿真中发现的问题进行相应的处理,同时也能够为用户提供更加直观更有说服力的动画产品演示。 2 NX软件设计压铸机取料机械手 下面仅以NX软件设计压铸机取料机械手为例,说明运动仿直模拟分析过程(如图1)。
以设计压铸机取料机械手例(图2)、介绍NX软件在机构设计中的应用,可实现存模块的无缝连接。它具有强大的实体建模、曲面造型、工程制图以及装配功能,可以进行运动仿真分析。 图2 压铸机取料机械手 2.1 步骤1:实体建模 NX具有完善的实体建模功能,可根据零件外形先绘制草图,添加尺寸约束,然后通过拉伸、旋转、扫面、放样、倒角、切分、布尔运算、拔模、抽壳等命令完成行零部件的设计,每个部件录用参数化设计,在装配过程中发现问题后可直接修改零件刚中的尺寸参数。
该机构包括旋转装置、水平移动装置、竖直移动装置,涉及到的运动方式是电机驱动、齿轮齿条传动、皮带轮传动、气缸驱动等,建模的零件包括:机架、电机、气缸、齿轮、齿条、卡爪、直线导轨等70个,绘制完成后放入统一的文件夹(如图3、4、5)。 图3 建模的一般工具 图4 零件建模设计
机械设计课程设计报告 ——抽油机机械系统设计 目录 第一节设计任务------------------------------(1) 第二节方案设计分析------------------------(2) 第三节轴承的选择及寿命计算----------(17) 第四节设计结果-----------------------------(22) 第五节心得体会----------------------------(23) 第六节附录-------------------------------------(25)
第一节设计任务 抽油机是将原油从井下举升到地面的主要采油设备之一,常用的有杆抽油设备有三部分组成:一是地面驱动设备即抽油机;二是井下的抽油泵,它悬挂在油井油管的下端;三是抽油杆,它将地面设备的运动和动力传递给井下抽油泵。抽油机由电动机驱动,经减速传动系统和执行系统(将转动变转为往复移动)带动抽油杆及抽油泵柱塞作上下往复移动,从而实现将原油从井下举升到地面的目的。 图1-1 假设电动机做匀速转动,抽油机的运动周期为T,抽油杆的上冲程时间与下冲程时间相等。冲程S=1.4m,冲次n=11次/min,上冲程由于举升原油,作用于悬点的载荷等于原油的重量加上抽油杆和柱塞自身的重量为40kN,下冲程原油已释放,作用于悬点的载荷就等于抽油杆和柱塞自身的重量为15kN。 要求: ①根据任务要求,进行抽油机机械系统总体方案设计,确定减速传动系统、执行系统的组成,绘制系统方案示意图。 ②根据设计参数和设计要求,采用优化算法进行执行系统(执行机构)的运动尺寸设计,优化目标为抽油杆上冲程悬点加速度为最小,并应使执行系统具有较好的传力性能。 ③建立执行系统输入、输出(悬点)之间的位移、速度和加速度关系,并编程进行数值计算,绘制一个周期内悬点位移、速度和加速度线图(取抽油杆最低位置作为机构零位)。 ④选择电机型号,分配减速传动系统中各级传动的传动比,并进行传动机构的工作能力设计计算。 ⑤对抽油机机械系统进行结构设计,绘制装配图及关键零件工作图。 第二节方案设计分析
ATS Engineering Inc. OWNER’S MANUAL AH100D
Attention 1. To avoid the particles of impurities (such as iron, glass, etc.) into the homogenizer to wear inlet valve and homogenizing valve, every materiel should be filtered by filter screen of 60-100 mu before it is put into homogenizer to homogenized. 2. It is forbidden to operate machine long time when there is no material 3. Do not turn on homogenizer under handle was tightly, for sudden overload capacity will damage motor. 4. AH08-100 homogenizer is designed for production. The machine can work for a long time. 5. Solid ceramic plunger used for homogenizer. So the temperature changes of product contact pieces couldn’t over 70℃, or the plunger may rupture. The range of temperature changes shouldn’t over 5℃, especially under cleaning operation.
GPS卫星运动及定位matlab仿真 作者姓名:专业班级:指导老师: 摘要 全球定位系统是具有全球性、全能性、全天候优势的导航定位、定时和测速系统,现在在全球很多领域获得了应用。 GPS卫星的定位是一个比较复杂的系统,其包含参数众多,如时间系统、空间坐标系统等。此次设计是针对卫星运动定位的matlab仿真实现,因要求不高,所以对卫星运动做了理想化处理,摄动力对卫星的影响忽略不计(所以为无摄运动),采用开普勒定律及最小二乘法计算其轨道参数,对其运动规律进行简略分析,并使用matlab编程仿真实现了卫星的运功轨道平面、运动动态、可见卫星的分布及利用可见卫星计算出用户位置。 通过此次设计,对于GPS卫星有了初步的认识,对于静态单点定位、伪距等相关概念有一定了解。 关键字:GPS卫星无摄运动伪距matlab仿真
The movement and location of GPS satellite on MA TLAB Abstract:Global positioning system is a global, versatility, all-weather advantage of navigation and positioning, timing and speed system, now there in many fields. GPS satellite positioning is a complex system, which includes many parameters, such as time and space coordinates system.This design is based on the matlab simulation of satellite motion and location, because demand is not ( so call it non-disturbed motion ).Using the Kepler and least-square method for calculating the parameters of orbital motion, for the characteristics of motion to make a simple analysis, and use the matlab simulation to program achieve the orbital plane of satellite, the dynamic motion, the distribution of visible satellites and using visible satellites to calculate the users?. Key words:GPS satellite non-disturbed motion pseudorange matlab simulation
图书分类号:密级:
毕业设计(论文) 激光打标机结构设计及运动仿真 THE DESIGN OF LASER MARKING MACHINE STRUCTURE AND MOVEMENT SIMULATION
学位论文原创性声明 本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。 本人完全意识到本声明的法律结果由本人承担。 论文作者签名:日期:年月日 学位论文版权协议书 本人完全了解关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归所拥有。有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 论文作者签名:导师签名: 日期:年月日日期:年月日
摘要 此次设计主要目标为设计一台激光打标机。此激光打标机主要用于芯片等小型工件的表面进行打标。另外,本文还对现今国外激光打标机的发展状况及趋势进行了分析,分析表明在现代高科技不断革新,不断发展的情况下。激光打标机的运用前景将会越来越广泛。激光加工技术越来越受到人们的喜爱与认同。 本次设计的任务主要是对激光打标机的机械结构进行分析、设计以及重要部件的运动仿真。前部分主要是对于激光打标机自动上料机构、机械手、传送带、打标机构、自动下料机构的具体分析与设计,在设计中主要选用了滚珠丝杠副、带轮、导轨等传动系统,并且考虑到使用时的安全性与合理性,还进行了计算与校核。根据上、下料机构、传送带的正常速度分别对步进电动机进行了选型。最后还对激光打标机运用UG6.0建模模块进行实体建模,针对激打标机的运动仿真问题,选用UG6.0的运动仿真模块进行模拟。 本次设计的成果为一台可实现全自动打标的激光打标机,采用滚珠丝杠副作为上、下料机构的传动结构、步进电动机为动力装置、机械手为抓取机构、材质为PVC的传送带、滑动导轨等装置。 从目前全球工业及其他行业的发展的情况来看,我们可以总结出国内外激光打标机未来的发展方向:全自动化、打标材料的多样化、微型精密化。 关键词激光打标;打标机;运动仿真