基于RLS算法的自适应均衡器仿真
一、均衡器原理
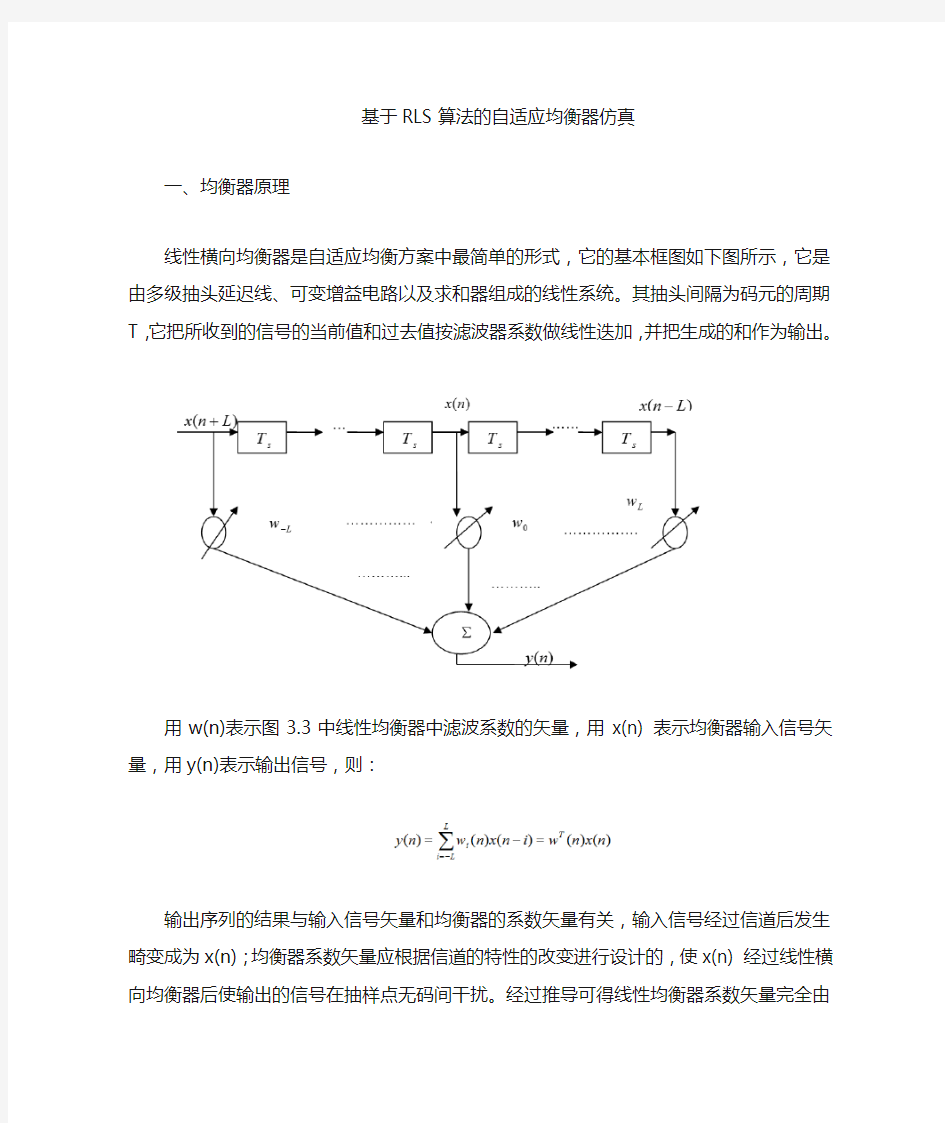
线性横向均衡器是自适应均衡方案中最简单的形式,它的基本框图如下图所示,它是由多级抽头延迟线、可变增益电路以及求和器组成的线性系统。其抽头间隔为码元的周期T,它把所收到的信号的当前值和过去值按滤波器系数做线性迭加,并把生成的和作为输出。
用w(n)表示图3.3中线性均衡器中滤波系数的矢量,用x(n) 表示均衡器输入信号矢量,用y(n)表示输出信号,则:
输出序列的结果与输入信号矢量和均衡器的系数矢量有关,输入信号经过信道后发生畸变成为x(n);均衡器系数矢量应根据信道的特性的改变进行设计的,使x(n) 经过线性横向均衡器后使输出的信号在抽样点无码间干扰。经过推导可得线性均衡器系数矢量完全由信道的传递函数来确定如果信道的特性发生了变化,相应的系数矢量也随之变化,这样才能保证均衡后在抽样时刻上无码间干扰。
期望信号为的d(n),则误差输出序列为e(n)为
利用RLS算法和横向均衡器,用MATLAB进行了仿真,遗忘因子为0.99,采样频率为1000Hz,模拟频率为10Hz,采样次数为1000.信道参数为[-0.005,0.009,-0.024,0.854,-0.218,0.049,-0.0323];抽头系数为30个。图5-2(a)给出了发送的正弦序列信道的图形,经过上述信道和噪声影响后输出的信号图形,以及经过均衡器后输出的信号图形,最后一个是通过RLS算法均衡器均衡后,期望输出与均衡后输出误差的收敛速度。
线性横向均衡器最大的优点是其结构非常简单,容易实现,因此在各种数字通信系统中得到了广泛的应用。但是其结构决定了两个难以克服的缺点:一是噪声的增强会使线性横向均衡器无法均衡具有深度零点的信道——为了补偿信道的深度零点,线性横向均衡器必须具有高增益的频率响应,然而同时无法避免也
会放大噪声;二是线性均衡器与接收信号的幅度信息关系密切,而幅度会随着多径衰落信道中相邻码元的改变而改变,因此滤波器抽头系数的调整不是独立的。由于以上两点线性横向均衡器在畸变严重的信道和低信噪比环境中性能较差,而且滤波器的抽头调整相互影响,从而需要更多的抽头数目。
二、运行结果与程序代码
RLS算法均衡器仿真程序代码:
clear all
L=30; %抽头数
delta=0.1; %遗忘因子
lamda=0.99;
n_max=1000;
Fs=1000;
F0=10;
w=zeros(L,1); %权系数初始化
d=zeros(L,1);
u=zeros(L,1);
P=eye(L)/delta; h=[-0.005,0.009,-0.024,0.854,-0.218,0.049,-0.0323];
for t=1:L-1
d(t)=sin(2*pi*F0*t/Fs);
end
input=d;
for t=L:n_max
input(t)=sin(2*pi*F0*t/Fs);
for i=2:L
d(L-i+2)=d(L-i+1);
end
d(1)=input(t);
u=filter(h,1,d);%信号经过信道
u=awgn(u,30,'measured');%加噪声
output=w'*u;
k=(P*u)/(lamda+u'*P*u);
E=d(1)-w'*u;
w=w+k*E;
P=(P/lamda)-(k*u'* P)/lamda;
indata(t-L+1)=u(1);
outdata(t-L+1)=output;
err(t-L+1)=E;
end
subplot(411),plot(input) ,title('发送信号');
subplot(412),plot(indata) ,title('接收信号');
subplot(413),plot(outdata) ,title('RLS均衡后输出信号'); subplot(414),plot(err) ,title('误差信号');
长江大学 毕业设计开题报告 题目名称自适应滤波器的设计与应用学院电信学院 专业班级信工10702班 学生姓名李雪利 指导教师王圆妹老师 辅导教师王圆妹老师 开题报告日期 2010年3月19日
自适应滤波器的设计与应用 学生:李雪利,长江大学电子信息学院 指导教师:王圆妹,长江大学电子信息学院 一、题目来源 来源于其他 二、研究目的和意义 滤波技术在当今信息处理领域中有着极其重要的应用。滤波是从连续的或离散的输入数据中除去噪音和干扰以提取有用信息的过程,相应的装置就称为滤波器。滤波器实际上是一种选频系统,他对某些频率的信号予以很小的衰减,使该部分信号顺利通过。而对其他不需要的频率信号予以很大的衰减,尽可能阻止这些信号通过。滤波器研究的一个目的就是:如何设计和制造最佳的(或最优的)滤波器。 在数字信号处理中,数字滤波是语音和图像处理、模式识别、频谱分析等应用中的一个基本处理算法。在许多应用场合,由于无法预先知道信号和噪声的特性或者它们是随时间变化的,仅仅用 FIR 和 IIR两种具有固定滤波系数的滤波器无法实现最优滤波。在这种情况下,必须设计自适应滤波器,以跟踪信号和噪声的变化。 自适应滤波器是利用前一时刻已获得的滤波器参数,自动地调节、更新现时刻的滤波器参数,以适应信号和噪声未知的统计特性,从而实现最优滤波。当在未知统计特性的环境下处理观测信号时,利用自适应滤波器可以获得令人满意的效果,其性能远超过通用方法所设计的固定参数滤波器。
三、阅读的主要参考文献及资料名称 1、《数字信号处理》刘益成(第二版)西安电子科技出版社 2、《数字信号处理》张小虹(第二版)机械工业出版社 3、自适应信号处理[M].西安:西安电子科技大学出版社,2001. 4.邹理和,数字信号处理, 国防工业出版社,1985 5.丁玉美等, 数字信号处理,西安电子科技大学出版社,1999 6.程佩青, 数字信号处理,清华大学出版社,2001 7. The MathWorks Inc, Signal Processing Toolbox For Use with MATLAB, Sept. 2000 8. vinay K.Ingle, John G.Proakis,数字信号处理及MATLAB实现,陈怀琛等译,电子工业出版社,1998.9 9、《MATLAB编程参考手册》 10、中国期刊网的相关文献 11、赫金,自适应滤波器原理第四版,西安工业出版社,2010-5-1 四、国内外现状和发展趋势与主攻方向 自适应滤波器的理论与技术是50年代末和60年代初发展起来的。它是现代信号处理技术的重要组成部分,对复杂信号的处理具有独特的功能。自适应滤波器在数字滤波器中试属于随机数字信号处理的范畴。对于随机数字信号的滤波处理,通常有维纳滤波,卡尔曼滤波和自适应滤波,维纳滤波的权系数是固定的,适用于平稳随机信号;卡尔曼滤波器的权系数是可变的,适用于非平稳随机信号中。但是,只有在对信号和噪声的统计特性先验
电子信息工程学院 《DSP技术及应用》课程设计报告 题目:自适应均衡器的设计 专业班级:通信工程专业10级通信B班 二〇一三年六月十日 目录 一、设计目的 (1) 二、设计要求 (1) 三、设计原理及方案 (2) 四、软件流程 (3)
五、调试分析 (9) 六、设计总结 (10) 七、参考文献 (10)
设计目的 通过本学期课程的学习,我们主要对数字信号系统的通信原理、传输机制等有了深入的了解。而实践性的课程设计能够起到提高综合运用能力,提高实验技术,启发创造新思想的效果。我们小组此次课程设计是自适应均衡器设计,通过查找资料,我们了解到在一个实际的通信系统中,由于多径传输、信道衰落等影响,在接收端也会产生严重的码间串扰。串扰造成严重影响时,必须对整个系统的传递函数进行校正,使其接近无失真传输条件。为了提高通信系统的性能,一般在接收端采用均衡技术。由于信道具有随机性、时变性,因此我们设计自适应均衡器,使其能够实时地跟踪无线通信信道的时变特性,根据信道响应自动调整滤波器抽头系数。 图1 公式1 我们决定使用的LMS 算法是目前使用很广泛的自适应均衡算法,同时我们按照查找 资料、系统设计、仿真实现、结果优化这一流程进行。不仅使我们进一步巩固了课程知识,也提高了我们分析问题、解决问题的能力。 二、设计要求 1、熟练掌握自适应滤波器的原理和LMS 算法的理论知识; 2、学会运用matlab 软件,生成并对该信号进二进制序列信号和正弦信号,并模拟一个码间串扰信道,使信号通过码间串扰信道,之后对其进行加噪处理。比较经过均衡器和未经均衡的效果随信噪比的变化。 3、完成以二进制序列信号和正弦信号为输入信号设计自适应均衡器的基础上,实现改变LMS 算法的步长进而改变自适应均衡器的抽头系数来观察信号的均方误差随步长的变化。 4、完成对归一化LMS 算法的研究,使经过信道的信号通过可以自定义NLMS 算法次数的自适应均衡器,观察信号的均方误差的变化曲线。 5、完成声音信号的采集,研究声音信号的时域波形和频域波形,对声音信号分别加高频噪声和通过模拟信道,使处理过的信号通过巴特沃斯滤波器和自适应均衡器,分析均衡器的效果。 6、组员之间相互协助,共同完成系统设计。 7、通过对自适应均衡器的设计,提高对通信原理及数字信号处理课程中所学知识的实际运用能力,以及对matlab 软件的操作能力。 设计原理及方案 1、原理图 '2()s i S i H w T T π+=∑ ||S w T π≤
自适应均衡算法LMS研究 一、自适应滤波原理与应用 所谓自适应滤波器,就是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。根据环境的改变,使用自适应算法来改变滤波器的参数和结构。 1.1均衡器的发展及概况 均衡是减少码间串扰的有效措施。均衡器的发展有史已久,二十世纪60年代前,电话信道均衡器的出现克服了数据传输过程中的码间串扰带来的失真影响。但是均衡器要么是固定的,要么其参数的调整是手工进行。1965年,Lucky在均衡问题上提出了迫零准则,自动调整横向滤波器的权系数。1969年,Gerhso和Porkasi,Milier分别独立的提出采用均方误差准则(MSE)。1972年,ungeboekc将LMS算法应用于自适应均衡。1974年,Gedard 在kalmna滤波理论上推导出递推最小均方算法RLS(Recursive least-squares)。LMS类算法和RLS类算法是自适应滤波算法的两个大类。自适应滤波在信道均衡、回波抵消、谱线增强、噪声抑制、天线自适应旁瓣抑制、雷达杂波抵消、相参检测、谱估计、窄带干扰抑制、系统辨识、系统建模、语音信号处理、生物医学、电子学等方面获得广泛的应用。 1.2均衡器种类 均衡技术可分为两类:线性均衡和非线性均衡。这两类的差别主要在于自适应均衡器的输出被用于反馈控制的方法。如果判决输出没有被用于均衡器的反馈逻辑中,那么均衡器是线性的;如果判决输出被用于反馈逻辑中并帮助改变了均衡器的后续输出,那么均衡器是非线性的。
LMS RLS 快速RLS 平方根RLS 梯度RLS LMS RLS 快速RLS 平方根RLS 梯度RLS LMS RLS 快速RLS 平方根RLS 算法图1.1 均衡器的分类 1.3自适应算法LMS算法 LMS算法是由widrow和Hoff于1960年提出来的,是统计梯度算法类的很重 要的成员之一。它具有运算量小,简单,易于实现等优点。 LMS算法是建立在Wiener滤波的基础上发展而来的。Wiener解是在最小均方误差(MMSE)意义下使用均方误差作为代价函数而得到的在最小误差准则下的最优解。因其结构简单、稳定性好,一直是自适应滤波经典有效的算法之一,被广泛应用于雷达、通信、声纳、系统辨识及信号处理等领域。 1.3.1 MSE的含义 LMS 算法的推导以估计误差平方的集平均或时平均(即均方误差,MSE)为基础。下面先介绍MSE的概念。 设计一个均衡系统如下图所示:
非线性系统的鲁棒自适应控制 Robust Adaptive Control of Uncertain Nonlinear Systems 郝仁剑3120120359 摘要:本文以非线性系统的控制问题为背景,介绍了多种经典的非线性系统的控制方法以及研究进展,分析了各种控制方法存在的优点和不足。着重介绍了鲁棒自适应控制在非线性系统中的应用,结合该领域的近期研究进展和实际应用背景,给出对鲁棒自适应控制的进一步研究目标。 关键词:非线性系统鲁棒控制自适应控制 1.前言 任何实际系统都具有非线性特性,非线性现象无处不在。严格地说,线性特性只是其中的特例,但是非线性系统与线性系统又具有本质的区别。由于非线性系统不满足叠加原理,因此非线性特性千差万别,这也给非线性系统的研究带来了很大的困难。同时,对于非线性系统很难求得完整的解,一般只能对非线性系统的运动情况做出估计。众所周知,控制理论经历了经典控制理论和现代控制理论两个发展阶段。在第二次世界大战前后发展起来的经典控制理论应用拉普拉斯变换等工程数学工具来分析系统的品质。它广泛地应用于单输入单输出、线性、定常、集中参数系统的研究中。随着控制对象的日益复杂以及人们对控制系统精度的不断提高,经典控制理论的局限性就暴露出来了。在20世纪50年代,Bellman根据最优原理创立了动态规划。同时庞特里亚金等学者创立了最大值原理。后来,Kalman提出了一系列重要的概念,如可观性,可控性,最优线性二次状态反馈,Kalman滤波等。这些理论和概念的提出大大促进了现代控制理论的发展。控制系统的设计都需要以被控对象的数学模型为依据,然而对于任何被控对象不可能得到其精确的数学模型,如在建立机器人的数学模型时,需要做一些合理的假设,而忽略一些不确定因数。不确定性的必然存在也正促使了现代控制理论中另一重要的研究领域——鲁棒控制理论的发展。Zmaes关于小增益定理的研究以及Kalman关于单输入单输出系统LQ调节器稳定裕量的分析为鲁棒控制理论的发展产生了重要的影响。特别是Zmaes1981年发表的论文[1]标志H∞控制理论的起步。1984年Francis和Zmaes基于古典插值理论提出H∞问题的初步解法。Glover运用Hankel算子理论给出了H∞问题的解析解。Doyle在状态空间上对Glover解法进行整理和归纳。至此H∞控制理论体系初步形成。同时,Doyle首次提出结构化奇异值的概念,后来形成了μ解析理论。另外一种重要的控制器设计方法是基于Lyapunov函数的方法。在进行鲁棒控制器的设计时,一般都假设系统的不确定性属于一个可描述集,比如增益有界,且上界己知等。一般来说,鲁棒控制是比较保守的控制策略。对所考虑集合内的个别元素,该系统并不是最佳控制。对于具有参数不确定性的一类系统,自适应控制技术被提了出来,如模型参考自适应控制和自校正控制等。在实际应用中,由于被控对象具有未建模动态,过程噪声或扰动的统计特性远比设计时所设想的情况更复杂,以及持续激励条件和严正实条件等“理想条件”被打破,这都会导致自适应控制算法的失稳。于是自适应控制的鲁棒性课题,即鲁棒自适应控制受到了广泛的关注。大量的工程实践表明,对于复杂的工业对象和过程,引入自适应策略能够提高控制精度,提高生产效率,降低成本。近年来,非线性自适应控制技术取得突破性的发展,控制器的结构化设计技术也正日益得到广泛的研究与应用。
学号: 课程设计 学院 专业 年级 姓名 论文题目 指导教师职称 成绩 2013年 1 月 10 日
目录 摘要 (1) 关键词 (1) Abstract (1) Key words (1) 引言 (1) 1 自适应滤波器原理 (2) 2 自适应滤波器算法 (3) 3 自适应滤波算法的理论仿真与DSP实现 (5) 3.1 MATLAB仿真 (5) 3.2 DSP的理论基础 (7) 3.3 自适应滤波算法的DSP实现 (9) 4 结论 ............................................... 错误!未定义书签。致谢 ................................................. 错误!未定义书签。参考文献 ............................................. 错误!未定义书签。
自适应滤波器算法的DSP实现 学生姓名:学号: 学院:专业: 指导教师:职称: 摘要:本文从自适应滤波器的基本原理、算法及设计方法入手。本设计最终采用改进的LMS算法设计FIR结构自适应滤波器,并采用MATLAB进行仿真,最后用DSP 实现了自适应滤波器。 关键词:DSP(数字信号处理器);自适应滤波器;LMS算法;FIR结构滤波器 DSP implementation of the adaptive filter algorithm Abstract:In this article, starting from the basic principles of adaptive filter and algorithms and design methods. Eventually the design use improved the LMS algorithm for FIR adaptive filter,and use MATLAB simulation, adaptive filter using DSP. Key words:DSP;adaptive filter algorithm;LMS algorithm;FIR structure adaptive filter 引言 滤波是电子信息处理领域的一种最基本而又极其重要的技术。在有用信号的传输过程中,通常会受到噪声或干扰的污染。利用滤波技术可以从复杂的信号中提取所需要的信号,同时抑制噪声或干扰信号,以便更有效地利用原始信号。滤波器实际上是一种选频系统,它对某些频率的信号予以很小的衰减,让该部分信号顺利通过;而对其他不需要的频率信号则予以很大的衰减,尽可能阻止这些信号通过。在电子系统中滤波器是一种基本的单元电路,使用很多,技术也较为复杂,有时滤波器的优劣直接决定产品的性能,所以很多国家非常重视滤波器的理论研究和产品开发[1]。近年来,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。从总的来说滤波可分为经典滤波和现代滤波。经典滤波要求已知信号和噪声的统计特性,如维纳滤波和卡尔曼滤波。现代滤波则不要求己知信号和噪声的统计特性,如自适应滤波。 自适应滤波器是统计信号处理的一个重要组成部分。在实际应用中,由于没有充足的信息来设计固定系数的数字滤波器,或者设计规则会在滤波器正常运行时改变,因此我们需要研究自适应滤波器。凡是需要处理未知统计环境下运算结果所产生的信
基于M精编B的自适应均衡器的研究 文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
基于M A T L A B的自适应均衡器的研究【摘要】:随着科技的发展,如何实现工作高效发展已经成为各个领域的首要因素,在通信领域亦是如此。ISI(码间串扰)是干扰时变通信质量和传输速度的主要因素。由于基带传输的通信系统不可能满足实际波形不失真的实时传输系统中,所以串扰是必然会发生的。通常把消除串扰的滤波器称为均衡器,它其实就是一个逆滤波器通道。信道失真在高速通信,无线通信中会更加严重,从而信道均衡技术是成为了通信传输中不可缺少的。在通信系统中,优良的信道均衡器可以弥补信道不理想特性,降低信号传输错误率,从而达到降低信号失真的一种重要技术手段。 本文介绍了自适应均衡器的设计原则,结合递归最小二乘算法和最小均方算法。最后运用MATLAB进一步分析仿真实现这些算法的自适应线性滤波器并分析其性能。 【关键词】:LMS算法;自适应;线性均衡器;RLS算法 Research on Adaptive Equalizer Based on MATLAB Abstract:With the development of technology,how to efficiently achieve development has become a primary factor in various field,is also true in the field of communication. ISI is one of the important reasons for varying interference communication quality and transmission speed. Baseband transmission of the communication system can not meet the real-time actual waveform of undistorted transmission system, crosstalk is bound to arise. Crosstalk elimination circuit usually called equalizer came from the principle that it is an inverse
用LMS算法实现自适应均衡器的MATLAB程序用LMS算法实现自适应均衡器 考虑一个线性自适应均衡器的原理方框图如《现代数字信号处理导论》p.275 自适应均衡器应用示意图。随机数据产生双极性的随机序列x[n],它随机地取+1 和-1。随机信号通过一个信道传输,信道性质可由一个三系数FIR滤波器刻画,滤波器系数分别是0.3,0.9,0.3。在信道输出加入方差为σ平方高斯白噪声,设计一个有11个权系数的FIR结构的自适应均衡器,令均衡器的期望响应为x[n-7],选择几个合理的白噪声方差σ平方(不同信噪比),进行实验。 用LMS算法实现这个自适应均衡器,画出一次实验的误差平方的收敛曲线,给出最后设计滤波器系数。一次实验的训练序列长度为500。进行20次独立实验, 画出误差平方的收敛曲线。给出3个步长值的比较。 1. 仿真结果: 1
2
3
4
用LMS算法设计的自适应均衡器系数 1 2 3 4 5 6 7 8 9 10 11 序 号 0.0383 -0.0480 0.0565 -0.1058 0.2208 -0.5487 1.4546 -0.5681 0.2238 -0.0997 0.0367 20 次 -0.0037 0.0074 -0.0010 -0.0517 0.1667 -0.5112 1.4216 -0.5244 0.1668 -0.0597 0.0164 1 次 结果分析: 观察三个不同步长情况下的平均误差曲线不难看出,步长越小,平均误差越小,但收敛速度越慢,为了好的精度,必然牺牲收敛速度;当降低信噪比时,尽管20次平均仍有好的结果,但单次实验的误差曲线明显增加,这是更大的噪声功率对随机梯度的影响。 5 附程序:
第二章自适应滤波器原理 2.1 基本原理 2.1.1 自适应滤波器的发展 在解决线性滤波问题的统计方法中,通常假设已知有用信号及其附加噪声的某些统计参数(例如,均值和自相关函数) ,而且需要设计含噪数据作为其输入的线性滤波器,使得根据某种统计准则噪声对滤波器的影响最小。实现该滤波器优化问题的一个有用方法是使误差信号(定义为期望响应与滤波器实际输出之差)的均方值最小化。对于平稳输入,通常采用所谓维纳滤波器( Wiener filter) 的解决方案。该滤波器在均方误差意义上使最优的。误差信号均方值相对于滤波器可调参数的曲线通常称为误差性能曲面。该曲面的极小点即为维纳解。 维纳滤波器不适合于应对信号和/或噪声非平稳问题。在这种情况下,必须假设最优滤波器为时变形式。对于这个更加困难的问题,十分成功的一个解决方案使采用卡尔曼滤波器 (Kalman filter )。该滤波器在各种工程应用中式一个强有力的系统。 维纳滤波器的设计要求所要处理的数据统计方面的先验知识。只有当输入数据的统计特性与滤波器设计所依赖的某一先验知识匹配时,该滤波器才是最优的。当这个信息完全未知时,就不可能设计维纳滤波器,或者该设计不再是最优的。而且维纳滤波器的参数是固定的。 在这种情况下,可采用的一个直接方法是“估计和插入过程”。该过程包含两个步骤,首先是“估计”有关信号的统计参数,然后将所得到的结果“插入( plug into)”非递归公式以计算滤波器参数。对于实时运算,该过程的缺点是要求特别精心制作,而且要求价格昂贵的硬件。为了消除这个限制,可采用自适应滤波器(adaptive filter)。采用这样一种系统,意味着滤波器是自设计的,即自适应滤波器依靠递归算法进行其计算,这样使它有可能在无法获得有关信号特征完整知识的环境下,玩完满地完成滤波运算。该算法将从某些预先确定的初始条件集出发,这些初始条件代表了人们所知道的上述环境的任何一种情况。我们还发现,在平稳环境下,该运算经一些成功迭代后收敛于某种统计意义上的最优维纳解。在非平稳环境下,该算法提供了一种跟踪能力,即跟踪输入数据统计特性随时间的变化,只要这种变化时足够缓慢的。 40年代,N.维纳用最小均方原则设计最佳线性滤波器,用来处理平稳随机
用RLS算法实现自适应均衡器的MATLAB程序 考虑一个线性自适应均衡器的原理方框图如《现代数字信号处理导论》p.275自适应均衡器应用示意图。随机数据产生双极性的随机序列x[n],它随机地取+1和-1。随机信号通过一个信道传输,信道性质可由一个三系数FIR滤波器刻画,滤波器系数分别是0.3,0.9,0.3。在信道输出加入方差为σ平方高斯白噪声,设计一个有11个权系数的FIR结构的自适应均衡器,令均衡器的期望响应为x[n-7],选择几个合理的白噪声方差σ平方(不同信噪比),进行实验。 用RLS算法实现这个自适应均衡器,画出一次实验的误差平方的收敛曲线,给出最后设计滤波器系数。一次实验的训练序列长度为500。进行20次独立实验,画出误差平方的收敛曲线。给出3个步长值的比较。 仿真结果:
用RLS算法设计的自适应均衡器系数 结果分析: 可以看到,RLS算法的收敛速度明显比LMS算法快,并且误差也比LMS算法小,但是当用更小的忘却因子时,单次实验结果明显变坏,当忘却因子趋于0时,LS算法也就是LMS算法。
附程序: 1. RLS法1次实验 % written in 2005.1.13 % written by li*** clear; N=500; db=25; sh1=sqrt(10^(-db/10)); u=1; m=0.0001*sh1^2; error_s=0; for loop=1:1 w=zeros(1,11)'; p=1/m*eye(11,11); V=sh1*randn(1,N ); Z=randn(1,N)-0.5; x=sign(Z); for n=3:N; M(n)=0.3*x(n)+0.9*x(n-1)+0.3*x(n-2); end z=M+V; for n=8:N; d(n)=x(n-7); end for n=11:N; z1=[z(n) z(n-1) z(n-2) z(n-3) z(n-4) z(n-5) z(n-6) z(n-7) z(n-8) z(n-9) z(n-10)]'; k=u^(-1).*p*z1./(1+u^(-1).*z1'*p*z1); e(n)=d(n)-w'*z1; w=w+k.*conj(e(n)); p=u^(-1).*p-u^(-1).*k*z1'*p; y(n)=w'*z1; e1(n)=d(n)-w'*z1; end error_s=error_s+e.^2; end w error_s=error_s./1; n=1:N; plot(n,error_s); xlabel('n (忘却因子u=1;DB=25时)'); ylabel('误差'); title('RLS法1次实验误差平方的均值曲线');
第37卷第3期一一一一一一一一一一一哈一尔一滨一工一程一大一学一学一报一一一一一一一一一一Vol.37?.3 2016年3月一一一一一 一一 一一一 JournalofHarbinEngineeringUniversity一一一一一一一一一一一Mar.2016 非线性系统自适应鲁棒控制器设计 焦鑫,江驹 (南京航空航天大学自动化学院,江苏南京200016) 摘一要:针对非线性系统模型参数具有不确定性的问题,利用二型模糊逻辑控制器特别适合于解决不确定性问题的优点和特点,提出二型模糊自适应滑模控制方法,设计了具有自适应和鲁棒性的非线性系统控制器三首先对非线性系统进行精确线性化,然后选取合适的滑模面,并设计了二型模糊逻辑系统,通过李亚普诺夫稳定性理论分析,得到自适应控制律三通过仿真实例验证,对比分析并验证了该控制方法能够克服不确定性参数的干扰,从而更好地控制非线性系统,使其具有一定的自适应性和鲁棒性三 关键词:自适应鲁棒控制器;非线性系统;不确定性;二型模糊逻辑系统;自适应性;滑模控制doi:10.11990/jheu.201411020 网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20151224.1405.002.html中图分类号:TP273一文献标志码:A一文章编号:1006?7043(2016)03?402?06 Designofanadaptiverobustcontrollerfornonlinearsystem JIAOXin,JIANGJu (CollegeofAutomationEngineering,NanjingUniversityofAeronauticsandAstronautics,Nanjing200016,China) Abstract:Toaddresstheproblemofanonlinearsystemwithuncertainparameters,inthispaperweproposeatype?2fuzzy?sliding?modecontrolmethodfordesigninganadaptiverobustcontrollerfornonlinearsystems.Webasedtheproposedmethodonthecharacteristicsoftype?2fuzzylogicsystems,whichareespeciallyadaptedforsolvinguncer?taintyproblems.Forthisnovelmethod,wefirstpreciselylinearizedthenonlinearmodel.Then,wedesignedatype?2fuzzylogicsystemwithselectedappropriateslidingmodesurfacestoovercometheuncertainparameters.Torapid?lystabilizethesystem,wealsodesignedadaptivelawsbydirectconstructiveLyapunovanalysis.Acomparisonofthesimulationresultsindicatesthattheproposedcontrolschemecanovercomeuncertaintiesandbettercontrolthenonlinearsystem,thusmakingthewholesystemmoreadaptiveandrobust. Keywords:adaptiverobustcontroller;nonlinearsystem;uncertainty;type?2fuzzylogicsystem;adaptivity;slidingmodecontrol 收稿日期:2014?11?10.网络出版日期:2015?12?24.基金项目:国家自然科学基金资助项目(61304223);江苏省普通高校 研究生科研创新基金资助项目(CXZZ13_0170);南京航空航天大学校博士学位论文创新与创优基金资助项目(BCXJ13?06). 作者简介:焦鑫(1986?),女,博士研究生; 江驹(1963?),男,教授,博士生导师. 通信作者:焦鑫,E?mail:jiaoxin_mengqu@163.com. 一一对非线性系统进行控制器设计时,往往会涉及模型参数不确定的问题,控制器设计的好坏直接决定系统性能和安全[1?2]三例如,飞行器在高空飞行时,由于大气参数和气动参数具有不确定性[3],如果飞行控制器不能很好的适应环境,缺乏一定的鲁棒性,那么飞行器的安全性将得不到保证[4?5]三 近年来,国内外学者针对这一问题进行了一定的研究三文献[6]利用神经网络参数的在线调整和动态非线性阻尼控制设计了飞行控制器,使飞行控制系统能够跟踪给定信号,具有一定的鲁 棒性三文献[7]将多输入系统看作多分布子系统,提出一种自律鲁棒自适应分散控制的新方法,结合直接反馈线性化和最优控制,给出了自律最优鲁棒自适应分散控制的设计方法三文献[8]利用确定性鲁棒控制方法对参数摄动的最坏情况进行研究,提出一种基于概率估计的H¥鲁棒控制方法,设计出的控制器具有较大的保守性和较高的控制成本三文献[9]结合高增益的反馈控制和基于在线优化跟踪控制器的前馈控制针对具有约束条件和不确定性的MIMO系统设计了自适应鲁棒控制器三 本文针对非线性系统模型参数不确定问题提出基于二型模糊自适应滑模控制的控制方法,该方法利用二型模糊逻辑控制器特别适合于解决不确定性问题的优点和特点[10?11],选取合适的滑模面,作为二型模糊控制系统的输入,经过降
自适应滤波器的设计与实现毕业论文 目录 第一章前言 (1) 1.1 自适应滤波器简介 (1) 1.2 选题背景及研究意义 (1) 1.3 国外研究发展现状 (2) 第二章自适应滤波器的基础理论 (4) 2.1 滤波器概述 (4) 2.1.1 滤波器简介 (4) 2.1.2 滤波器分类 (4) 2.1.3 数字滤波器概述 (4) 2.2 自适应滤波器基本理论 (7) 2.3 自适应滤波器的结构 (9) 第三章自适应滤波器递归最小二乘算法 (11) 3.1 递归最小二乘算法 (11) 3.1.1 递归最小二乘算法简介 (11) 3.1.2 正则方程 (11) 3.1.3 加权因子和正则化 (16) 3.1.4 递归计算 (18) 3.2递归最小二乘(RLS)算法的性能分析 (22) 第四章基于MATLAB自适应滤波器仿真 (23) 4.1 正弦波去噪实验 (23) 4.2 滤波器正则化参数的确定 (28) 4.2.1 高信噪比 (28) 4.2.2 低信噪比 (31) 4.2.3 结论 (33) 4.3 输入信号不同对滤波效果的影响 (33)
4.3.1 输入信号为周期信号 (33) 4.3.2 输入信号为非周期信号 (38) 第五章结论与展望 (44) 5.1 结论 (44) 5.2 对进一步研究的展望 (44) 参考文献 (45) 致谢 (46) 附录 (46) 声明 (58)
第一章前言 1.1自适应滤波器简介 自适应滤波器属于现代滤波的畴,它是40年代发展起来的自适应信号处理领域的一个重要应用,自适应信号处理主要是研究结构可变或可调整的系统,可以通过自身与外界的接触来改善自身对信号处理的性能,通常这类系统是时变的非线性系统,可以自动适应信号传输的环境和要求,无须详细的知道信号的结构和实际知识,无须精确设计处理系统本身。 自适应系统的非线性特性主要是由系统对不同的信号环境实现自身参数的调整来确定的。自适应系统的时变特性主要是由其自适应响应或自适应学习过程来确定的,当自适应过程结束和系统不再进行时,有一类自适应系统可成为线性系统,并称为线性自适应系统,因为这类系统便于设计且易于数学处理,所以实际应用广泛。本文研究的自适应滤波器就是这类滤波器。 自适应滤波器是相对固定滤波器而言的,固定滤波器属于经典滤波器,它滤波的频率是固定的,自适应滤波器的频率则是自动适应输入信号而变化的,所以其适用围更广。在没有任何信号和噪声的先验知识的条件下,自适应滤波器利用前一时刻已获得的滤波器参数来自动调节现时刻的滤波器参数,以适应信号和噪声未知或随机变化的统计特性,从而实现最优滤波。1.2选题背景及研究意义 伴随着移动通信事业的飞速发展,自适应滤波技术应用的围也日益扩大。早在20世纪40年代,就对平稳随机信号建立了维纳滤波理论。根据有用信号和干扰噪声的统计特性(自相关函数或功率谱),用线性最小均方误差估计准则设计的最佳滤波器,称为维纳滤波器。这种滤波器能最大程度地滤除干扰噪声,提取有用信号。但是,当输入信号的统计特性偏离设计条件,则它就不是最佳的了,这在实际应用中受到了限制。到60年代初,由于空间技术的发展,出现了卡尔曼滤波理论,即利用状态变量模型对非平稳、多输入多输出随机序列作最优估计。现在,卡尔曼滤波器已成功地应用到许多领域,它既可对平稳的和非平稳的随机信号作线性最佳滤波,也可作非线性滤波。实质上,维纳滤波器是卡尔曼滤波器的一个特例。 在设计卡尔曼滤波器时,必须知道产生输入过程的系统的状态方程和测量方程,即要求对信号和噪声的统计特性有先验知识,但在实际中,往往难以预知这些统计特性,因此实现不了真正的最佳滤波。 Widrow.B等于1967年提出的自适应滤波理论,可使自适应滤波系统的参数自动地调整而
电子信息系 综合课程设计 基于Matlab的自适应均衡器设计 专业名称通信工程 班级学号 学生姓名 指导教师 设计时间2010.12.20~2011.1.7
课程设计任务书 专业:学号:学生姓名(签名): 设计题目:基于Matlab的自适应均衡器设计 一、设计实验条件 实验室,Matlab软件 二、设计任务及要求 1. 课题要求系统学习时域均衡原理,掌握理论知识; 2. 首先进行时域均衡原理和算法设计,再在所用的仿真软件Matlab上对 设计进行仿真分析,最后写实验报告; 3. 对整个系统设计进行回顾,总结心得。 三、设计报告的内容 1.设计题目与设计任务(设计任务书) 2.前言(绪论)(设计的目的、意义等) 3.设计主体(各部分设计内容、分析、结论等) 4.结束语(设计的收获、体会等) 5.参考资料 四、设计时间与安排 1、设计时间:3周 2、设计时间安排: 熟悉实验设备、收集资料: 4天 设计图纸、实验、计算、程序编写调试: 7天 编写课程设计报告: 3天 答辩: 1天
基于Matlab的自适应均衡器设计 一、设计目的及意义: 通过本学期通信原理课程的学习,主要对数字信号系统的通信原理、传输机制等有了系统深入的了解。而实践性的课程设计能够起到提高综合运用能力,加强理论知识的学习,提高实验技术,启发创造新思想的效果。 此次课程设计是自适应均衡器设计。我们按照查找资料、软件选择、系统设计、仿真实现、结果优化这一流程进行。不仅使我们进一步巩固了课程知识,也提高了我们分析问题、解决问题的能力。 二、设计主体: 1 、设计原理 数字信号经过这样的信道传输以后,由于受到了信道的非理想特性的影响,在接收端就会产生码间干扰(ISI),使系统误码率上升,严重情况下使系统无法继续正常工作。理论和实践证明,在接收系统中插入一种滤波器,可以校正和补偿系统特性,减少码间干扰的影响。这种起补偿作用的滤波器称为均衡器。 时域均衡是利用均衡器产生的时间波形去直接校正已畸变的波形,使包括均衡器在内的整个系统的冲击响应满无码间串扰条件。频域均衡是从校正系统频率特性出发,使包括均衡器的基带系统的总特性满足无失真传输条件;频域均衡在信道特性不变,且在传输低速数据时是适用的。而时域均衡可以根据信道特性的变化进行调整,能够有效地减小码间串扰,故在高速数据传输中得以广泛应用。 图1数字基带传输系统 在实际中,当数字基带传输系统(如图1)的特性 ()()ω ω ω ω R T G C G H) ( ) (=不 满足奈奎斯特第一准则时,就会产生有码间串扰的响应波形。现在我们来证明:
目录 摘要…………………..………………………………………………………..….............I 第1章绪论....................................................................................................................错误!未定义书签。 1.1引言……………………………………………...…..…………...……………...错误!未定义书签。 1.2课题研究意义和目的 (1) 1.3国内外研究发展状况 (2) 1.4本文研究思路与主要工作 (4) 第2章自适应滤波器理论基础 (5) 2.1自适应滤波器简介 (5) 2.2自适应滤波器的原理 (5) 2.3自适应滤波算法 (7) 2.4TMS320VC5402的简介 (8) 第3章总体方案设计 (10) 3.1无限冲激响应(IIR)滤波器 (10) 3.2有限冲激响应(FIR)滤波器 (11) 3.3电路设计 (11) 4基于软件设计及仿真 (17) 4.3 DSP的理论基础 (17) 4.4自适应滤波算法的DSP实现 (18) 5总结 (21) 参考文献 (22) 致谢 (23) 附录自适应滤波源代码 (24)
第1章绪论 1.1引言 随着微电子技术和计算机技术的迅速发展,具备了实现自适应滤波器技术的各种软硬件条件,有关自适应滤波器的新算法、新理论和新的实施方法不断涌现,对自适应滤波的稳定性、收敛速度和跟踪特性的研究也不断深入,这一切使该技术越来越成熟,并且在系统辨识、通信均衡、回波抵消、谱线增强、噪声抑制、系统模拟语音信号处理、生物医学电子等方面都获得了广泛应用口。自适应滤波器实现的复杂性通常用它所需的乘法次数和阶数来衡量,而DSP强大的数据吞吐量和数据处理能力使得自适应滤波器的实现更容易。目前绝大多数的自适应滤波器应用是基于最新发展的DSP 来设计的. 滤波技术是信号处理中的一种基本方法和技术,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。从总的来说滤波可分为经典滤波和现代滤波。经典滤波要求已知信号和噪声的统计特性,如维纳滤波和卡尔曼滤波。现代滤波则不要求己知信号和噪声的统计特性,如自适应滤波。自适应滤波的原理就是利用前一时刻己获得的滤波参数等结果,自动地调节现时刻的滤波参数,从而达到最优化滤波。自适应滤波具有很强的自学习、自跟踪能力,适用于平稳和非平稳随机信号的检测和估计。自适应滤波一般包括3个模块:滤波结构、性能判据和自适应算法。其中,自适应滤波算法一直是人们的研究热点,包括线性自适应算法和非线性自适应算法,非线性自适应算法具有更强的信号处理能力,但计算比较复杂,实际应用最多的仍然是线性自适应滤波算法。线性自适应滤波算法的种类很多,有LMS自适应滤波算法、R路自适应滤波算法、变换域自适应滤波算法、仿射投影算法、共扼梯度算法等。 1.2课题研究意义和目的 自适应滤波理论与技术是现代信号处理技术的重要组成部分,对复杂信号的处理具有独特的功能,对自适应滤波算法的研究是当今自适应信号处理中最为活跃的研究课题之一。自适应滤波器与普通滤波器不同,它的冲激响应或滤波参数是随外部环境的变化而变化的,经过一段自动调节的收敛时间达到最佳滤波的要求。自适应滤波器本身有一个重要的自适应算法,这个算法可以根据输入、输出及原参量信号按照一定准则修改滤波参量,以使它本身能有效的跟踪外部环境的变化。因此,自适应数字系
第18卷 第3期Vol.18 No.3 重 庆 工 学 院 学 报 Journal of Chongq ing Institute of Technology 2004年6月 June.2004 【机械与电子】 基于LMS算法的自适应均衡器的MATLAB实现 尹丽丽,吴跃东 (江苏省淮安信息职业技术学院电子信息工程系,江苏淮安 223001) 摘要:介绍了基于最小均方算法(LMS算法)的自适应均衡器的原理和结构,针对用硬件实现L MS 算法的自适应均衡器存在的诸多缺点,利用MATLAB工具对各种结构形式的自适应均衡器在不同 信道模型下的收敛速度和精度进行仿真,并介绍了该仿真程序。 关键词:自适应均衡器;L MS算法;MATLAB 中图分类号:TN914 文献标识码:A 文章编号:1671-0924(2004)03-0061-02 MATLAB Realization of Automatic Adaptive Equalizer Based on LMS Algorithm YIN Li-li,WU Yue-dong (Depart ment of Electronic Information Engineering,Huaian Technical and Vocational School of Information,Huaian,223001,China) A bstract:This paper introduces the principle and structure of automatic adaptive equalizer based on LMS.As it has many dis- advantages,MATLAB tool can be used to simutate the convergence rate and precision of au kinds of automatic adaptive equaliz-er Under different informati channel madels.algorithm and the ways to realize it with MATLAB. Key words:automatic adaptive equalizer;LMS algorith m;MATLAB 0 引言 在一个实际的通信系统中,基带传输系统不可能完全满足理想的波形传输无失真条件,因而串扰几乎是不可避免的。当串扰造成严重影响时,必须对整个系统的传递函数进行校正,使其接近无失真传输条件。这种校正可以采用串接一个滤波器的方法,以补偿整个系统的幅频和相频特性。如果这种校正是在频域进行的,称为频域均衡;如果校正是在时域里进行,即直接校正系统的冲激响应,则称为时域均衡。随着数字信号处理理论和超大规模集成电路的发展,时域均衡正成为如今高速数据传输中所使用的主要方法。 1 系统构成及工作原理 目前时域均衡的最常用方法是在基带信号接收滤波器之后插入一个横向滤波器,它由一条带抽头的延时线构成,抽头间隔等于码元周期,每个抽头的延时信号经加权送到一个相加电路汇总后输出,其形式与有限冲激响应滤波器(FIR)相同,如图1所示。横向滤波器的相加输出经抽样送往判决电路。每个抽头的加权系数分别为W-N,W-N+1,…,W N,输入波形的抽样值序列为{X k},输出波形的抽样值序列为{Y k},则y k=∑ N i=-N W i X k-i,k=-2N,……,2N。 横向滤波器的特征完全取决于各抽头系数,而抽头系数的调整有两种方法:手工调整和自动调整。如果接收端知道信道的特性,包括信道冲激响应或频率响应,一般采用比较简单的手动调整方式。由于无线通信信道具有随机性和时变性,即信道特性事是未知的,信道响应是时变的,这就要求均衡器必须能够实时地跟踪无线通信信道的时变特性,可以根据信道响应自动调整抽头系数,我们称这种可以自动调整滤波器抽头系数的均衡器为自适应均衡器。 收稿日期:2003-11-03 作者简介:尹丽丽(1975-),女,安徽人,主要从事电子设计自动化教育与研究.