行星传动传动比及啮合频率计算
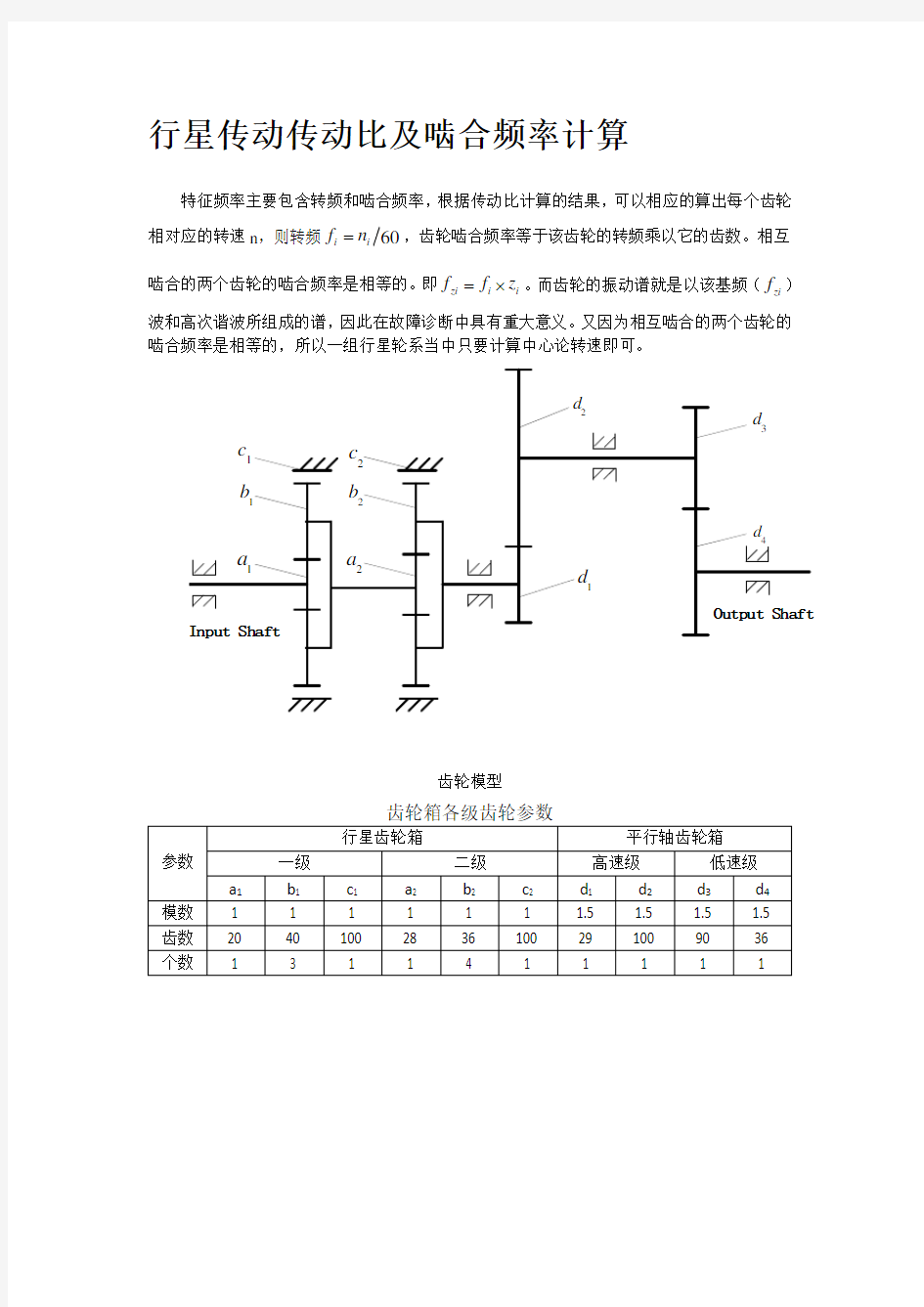
特征频率主要包含转频和啮合频率,根据传动比计算的结果,可以相应的算出每个齿轮相对应的转速n ,则转频60i i f n =,齿轮啮合频率等于该齿轮的转频乘以它的齿数。相互啮合的两个齿轮的啮合频率是相等的。即zi i i f f z =?。而齿轮的振动谱就是以该基频(zi f )波和高次谐波所组成的谱,因此在故障诊断中具有重大意义。又因为相互啮合的两个齿轮的啮合频率是相等的,所以一组行星轮系当中只要计算中心论转速即可。
1
a 1
b 1
c 2
a 2
b 2
c Input Shaft
Output Shaft
2
d 1
d 3
d 4
d
齿轮模型
齿轮箱各级齿轮参数
参数
行星齿轮箱 平行轴齿轮箱 一级 二级 高速级 低速级
a 1
b 1
c 1 a 2 b 2 c 2
d 1 d 2 d 3 d 4 模数 1 1 1 1 1 1 1.5 1.5 1.5 1.5 齿数 20 40 100 28 36 100 29 100 90 36 个数
1
3
1
1
4
1
1
1
1
1
n –输入转速;
Za1–第一级太阳轮齿数;Zb1 –第一级行星轮齿数;Zc1–第一级内齿圈齿数; Za2 –第二级太阳轮齿数;Zb2 –第二级行星轮齿数;Zc2 –第二级内齿圈齿数;
(1) 一级行星轮系:
111111
a H c c H a n n z n n z -=-- 其中,n n n a c ==11,0 ,则 )1//(11111+==a c a H
b z z n n n =n 61
(2) 二级行星轮系:
222
222
a H c c H a n n z
n n z -=--其中,
1
22,0H a c n n n ==,则
)1//(22222+==a c a H b z z n n n =232
7
a n 行星轮系级: 传动比i =192/7 (3)平行轴:
中间低速级: 传动比i1= 小
大
n n =100/29
高速级: 传动比i2= 小
大
n n =2.5 平行轴传动比:i=8.6 总传动比:i=232
齿轮箱振动特征频率 1. 啮合频率:
1)转速同步频率 n f = n/60 式中,n 为轴转速(转/分)。
2)定轴齿轮啮合频率
n f = nz/60 式中,n 为轴转速(转/分), r z 为齿轮齿数。
3)行星轮系,啮合频率用下式计算: m f = a b a c b z f f z f ?-=?)( 式中,b n 为行星轮架转速(转/分)
,c z 为内齿圈齿数,a f 为太阳轮转频,a z 为太阳轮齿数。
2. 故障特征频率: 1) 行星轮: 局部故障特征频率: 太阳轮: 行星论: 分布式故障特征频率: 太阳轮: 行星论: 2) 平行轴:
假定输入转速1500,由上述公式可得各级齿轮的故障特征频率如下:
第一级行星齿轮:
1) rpm n n a 15001==
rpm n n n a b a 2506/112=== Hz n f a a 2560/11== Hz n f b b 17.460/11==
Hz f z f b c m a 41717.4100111=?=?=
2) rpm n n b a 25012==
==
=21232
7
a d
b n n n 54.7rpm Hz n f a a 17.460/22==
91.060/22==b b n f
Hz f z f b c m a 91222=?=
3)12
1
32d d d d d n z z n n ?=
==15.86rpm 60/332d d d n f f ===0.26Hz 222d d m d z f f ?==26Hz Hz z f f d d m d 36.9444=?=
行星传动传动比及啮合频率计算 特征频率主要包含转频和啮合频率,根据传动比计算的结果,可以相应的算出每个齿轮相对应的转速n ,则转频60i i f n =,齿轮啮合频率等于该齿轮的转频乘以它的齿数。相互啮合的两个齿轮的啮合频率是相等的。即zi i i f f z =?。而齿轮的振动谱就是以该基频(zi f )波和高次谐波所组成的谱,因此在故障诊断中具有重大意义。又因为相互啮合的两个齿轮的啮合频率是相等的,所以一组行星轮系当中只要计算中心论转速即可。 1 a 1 b 1 c 2 a 2 b 2 c Input Shaft Output Shaft 2 d 1 d 3 d 4 d 齿轮模型 齿轮箱各级齿轮参数 参数 行星齿轮箱 平行轴齿轮箱 一级 二级 高速级 低速级 a 1 b 1 c 1 a 2 b 2 c 2 d 1 d 2 d 3 d 4 模数 1 1 1 1 1 1 1.5 1.5 1.5 1.5 齿数 20 40 100 28 36 100 29 100 90 36 个数 1 3 1 1 4 1 1 1 1 1
n –输入转速; Za1–第一级太阳轮齿数;Zb1 –第一级行星轮齿数;Zc1–第一级内齿圈齿数; Za2 –第二级太阳轮齿数;Zb2 –第二级行星轮齿数;Zc2 –第二级内齿圈齿数; (1) 一级行星轮系: 111111a H c c H a n n z n n z -=-- 其中,n n n a c ==11,0 ,则 )1//(11111+==a c a H b z z n n n =n 6 1 (2) 二级行星轮系: 222 222 a H c c H a n n z n n z -=--其中, 1 22,0H a c n n n ==,则 )1//(22222+==a c a H b z z n n n =232 7 a n 行星轮系级: 传动比i =192/7 (3)平行轴: 中间低速级: 传动比i1= 小 大 n n =100/29 高速级: 传动比i2= 小 大 n n =2.5 平行轴传动比:i=8.6 总传动比:i=232 齿轮箱振动特征频率 1. 啮合频率: 1)转速同步频率 n f = n/60 式中,n 为轴转速(转/分)。 2)定轴齿轮啮合频率 n f = nz/60 式中,n 为轴转速(转/分), r z 为齿轮齿数。 3)行星轮系,啮合频率用下式计算: m f = a b a c b z f f z f ?-=?)( 式中,b n 为行星轮架转速(转/分),c z 为内 齿圈齿数,a f 为太阳轮转频,a z 为太阳轮齿数。 m f =(15.95-1.975)*13=181.675 m f =1.975*92=181.7
行星齿轮减速机主要传动结构为:行星轮,太阳轮,外齿圈。行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速。相对其他减速机,行星减速机具有高刚性、高精度(单级可做到1分以内)、高传动效率(单级在97%-98%)、高的扭矩/体积比、终身免维护等特点。因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量。行星减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上。工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度。 行星齿轮减速机构成及意义、特点 行星减速机主要传动结构为:行星轮,太阳轮,外齿圈. 行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速. 相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点. 因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量. 减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度. 行星减速机的几个概念: 级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降. 回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙. 行星减速机是一种用途广泛的工业产品,其性能可与其它军品级减速机产品相媲美,却有着工业级产品的价格,被应用于广泛的工业场合。 该减速器体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低。具有功率分流、多齿啮合独用的特性。最大输入功率可达104kW。适用于起重运输、工程机械、冶金、矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器和航空航天等工业部门行星系列新品种WGN定轴传动减速器、WN子母齿轮传动减速器、弹性均载
行星齿轮传动比计算 在《机械设计》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错, 其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比, 其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这 几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传 动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。
行星齿轮传动比计算 在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。 注: H ab i =±所有从动轮齿数的连乘积所有主动轮齿数的连乘积 ( 正负号不表示周转轮系中a 轮和b 轮的实际转向关系,而表示转化轮系中a 轮和b 轮的转向关系。转向相同取正,相反取负。 不能省略正负号,此处正负号关系着传动比的计算数值!)
行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。 【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T的机构
1 2 3 4 差动轮系:2个运动 行星轮系:, 对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 13 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W AH H A H H A H AB i W W W W W i -=-=--= 110H AB AH i i -=1
【最新整理,下载后即可编辑】 行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类
若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系:, H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==
对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1 =100,Z 2 =101,Z 2' =100, Z 3 =99。求:输入件H对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H行星架 给整个机构(-W H )绕OO轴转动 = B W AH H A H H A H AB i W W W W W i- = - = - - =1 1 H AB AH i i- =1 2 1 3 2 2 3 1 13 )1 ( ' ? ? ? - = - - = Z Z Z Z W W W W i H H H
第八章 轮系及其传动比计算 第四十八讲齿轮系及其分类 如图8—1所示,由一系列齿轮相互啮合而组成的传动系统简称轮系。根据轮系中各齿轮运动形式的不同,轮系分类如下: ? ? ? ? ? ?? ? ? ? ? ? ? ? = = ? ? ? 成 由几个周转轮系组合而 和周转轮系混合而成或 混合轮系:由定轴轮系 ) 行星轮系( ) 差动轮系( 周转轮系(轴有公转) 空间定轴轮系 平面定轴轮系 定轴轮系(轴线固定) 轮系 1 2 F F 图8—1 图8—2 图8—3 定轴轮系中所有齿轮的轴线全部固定,若所 有齿轮的轴线全部在同一平面或相互平行的平 面内,则称为平面定轴轮系,如图8—1所示, 若所有齿轮的轴线并不全部在同一平面或相互 平行的平面内,则称为空间定轴轮系;若轮系 中有一个或几个齿轮轴线的位置并不固定,而 是绕着其它齿轮的固定轴线回转,如图8—2,8 —3所示,则这种轮系称为周转轮系,其中绕着 固定轴线回转的这种齿轮称为中心轮(或太阳 轮),即绕自身轴线回转又绕着其它齿轮的固定 轴线回转的齿轮称为行星轮,支撑行星轮的构图8—4 件称为系杆(或转臂或行星架),在周转轮系中,一般都以中心轮或系杆作为运动的输入或输出构件,常称其为周转轮系的基本构件;周转轮系还可按其所具有的自由度数目作进一步的划分;若周转轮系的自由度为2,则称其为差动轮系如图8—2所示,为了确定这种轮系的运动,须给定两个构件以独立运动规律,若周转轮系的自由度为1,如图8—3所示,则称其为行星轮系,为了确定这种轮系的运动,只须给定轮系中一个构件以独立运动规律即可;在各种实际机械中所用的轮系,往往既包含定轴轮系部分,又包含周转轮系部分,或者由几部分周转轮系组成,这种复杂的轮系称为复合轮系如图8—4所示,该复合轮系可分为左边的周转轮系和右边的定轴轮系两部分。
行星齿轮传动比分析与计算 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系: , 对于行量轮系: H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==0 3=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W
∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 ∵W 3=0 ∴ ∴ 若Z 1=99 行星轮系传动比是计算出来的,而不是判断出来的。 AH H A H H A H A B i W W W W W i -=-=--= 110H AB AH i i -=1213 223113)1(' ???-=--= Z Z Z Z W W W W i H H H H H H i Z Z Z Z W W W 13 213210' =--H H i Z Z Z Z W W 13 21321 1'=+- H H i i 13 1100100991011??- =10000 1001009910111 111=??- = = H H i i 1001-=H i
NGWN 型行星机构的传动比计算及效率计算 结构形式: 传动比: Z Z Z Z , H Z Z , H Z Z Z Z 作为本例ZWPD010010‐171结构, 太阳轮齿数为Za=6 行星轮齿数为Zc=Zd=23 固定内齿轮齿数为Zb=51 输出内齿轮齿数为Ze=54 固定内齿轮b 与机架相联时,太阳轮输入,输出内齿轮输出。 传动比为(1+51/6)/ (1‐51/54)=171 这类传动的效率计算公式为: 当db>de 时,也就是当固定内齿轮的齿数大于输出内齿轮的齿数时:η . H H 当db 通常取φ 2.3f( Z Z ),总效率为摩擦系数与一些参数的计算值。 对于NGWN型,f为0.1‐0.12 计算φ H 2.3X0.1X 计算结果0.0065882352941176470588235294117647 其余计算i 171 其余计算i H Z Z 8.5 最终计算η . H H 0.98/(1+171/9.5x0.0065882353) 0.87610433311017102442162874190372 这种方法计算的结果明显偏大 原因是用钢铁的摩擦系数,而塑胶齿轮的滑动摩擦系数要比金属大得多,故产生误差。 粗略的计算, 金属之间的摩擦系数为0.05 而塑胶之间的摩擦系数约为0.2左右,故可用计算数据 1‐(1‐η)/0.05*0.2= 0.5044 行星齿轮机构传动比计算方法 Key words: epicyclic gear train; speed ratio; compute way. 随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。 行星齿轮传动或称周转轮系。根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。为理解方便,本论文所讨论限于2K-H型周转轮系。 关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。 1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动 Fig 1 Epicyclic gear train 0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、H ω为行星架H 转速、3 ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即1 3 Z Z =α。 1 行星架固定法 机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。 如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为H ωωωω、、、321。我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。那么,此时行星架的转速为()0=-+=H H H H ωωω,相当于行星 定轴轮系传动比的计算 126 §5-6 定轴轮系传动比的计算 一、轮系的基本概念 ● 轮系:由一系列相互啮合的齿轮组成的传动系统; ● 轮系的分类: 定轴轮系: 所有齿轮轴线的位置固定不动; 周转轮系:至少有一个齿轮的轴线不固定; ● 定轴轮系的分类: 平面定轴轮系:轴线平行; 空间定轴轮系:不一定平行; ● 轮系的传动比: 轮系中首、末两轮的角速度(或转速)之比,包括两轮的角速比的大小和转向关系。 传动比的大小:当首轮用“1”、末轮用“k ” 表示时,其传动比的大小为: i 1k = ω1/ωk =n 1/n k 传动比的方向:首末两轮的转向关系。 相互啮合的两个齿轮的转向关系: 127 二、平面定轴轮系传动比的计算 特点: ●轮系由圆柱齿轮组成,轴线互相平行; ●传动比有正负之分: 首末两轮转向相同为“+”,相反为“-”。 1、传动比大小 设Ⅰ为输入轴,Ⅴ为输出轴; 各轮的齿数用Z 来表示; 角速度用ω表示; 首先计算各对齿轮的 传动比: 所以: 122112z z i ==ωω 32223332z i z ωωωω'''===33434443z i z ωωωω'''===455445z z i == ωω 128 结论: 定轴轮系的传动比等于各对齿轮传动比的连乘积,其值等于各对齿轮的从动轮齿数的乘积与主动轮齿数的乘积之比; 2、传动比方向 在计算传动比时,应计入传动比的符号: 首末两轮转向相同为“+”,相反为“-”。 (1)公式法 式中:m 为外啮合圆柱 齿轮的对数 举例: (2)箭头标注法 采用直接在图中标注箭头的方法来确定首末两轮的 转向,转向相同为“+”,相反为 “-”。 举例: 11211)1(--==k k m k k z z z z i K K ωω 行星齿轮传动的特点 行星齿轮传动与普通齿轮传动相比较,它具有许多独特的优点。它的最显著的特点是:在传递动力时它可以进行功率分流;同时,其输入轴与输出轴具有同轴性,即输出轴与输入轴均设置在同一主轴线上。所以,行星齿轮传动现已被人们用来代替普通齿轮传动,而作为各种机械传动系统中的减速器、增速器和变速装置。尤其是对于那些要求体积小、质量小、结构紧凑和传动效率高的航空发动机、起重运输、石油化工和兵器等的齿轮传动装置以及需要差速器的汽车和坦克等车辆的齿轮传动装置,行星齿轮传动已得到了越来越广泛的应用。 行星齿轮传动的主要特点如下。 (1)体积小、质量小,结构紧凑,承载能力大由于行星齿轮传动具有功率分流和各中心轮构成共轴线式的传动以及合理地应用内啮合齿轮副,因此可使其结构非常紧凑。再由于在中心轮的周围均匀地分布着数个行星轮来共同分担载荷,从而使得每个齿轮所承受的负荷较小,并允许这些齿轮采用较小的模数。此外,在结构上充分利用了内啮合承载能力大和内齿圈本身的可容体积,从而有利于缩小其外廓尺寸,使其体积小,质量小,结构非常紧凑,且承载能力大。一般,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的1/2~1/5 (即在承受相同的载荷条件下)。 (2)传动效率高由于行星齿轮传动结构的对称性,即它具有数个匀称分布的行星轮,使得作用于中心轮和转臂轴承中的反作用力能互相平衡,从而有利于达到提高传动效率的作用。在传动类型选择恰当、结构布置合理的情况下,其效率值可达0.97~0.99。 (3)传动比较大,可以实现运动的合成与分解只要适当选择行星齿轮传动的类型及配齿方案,便可以用少数几个齿轮而获得很大的传动比。在仅作为传递运动的行星齿轮传动中,其传动比可达到几千。应该指出,行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、体积小等许多优点。而且,它还可以实现运动的合成与分解以及实现各种变速的复杂的运动。 (4)运动平稳、抗冲击和振动的能力较强由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的性力相互平衡。同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的能力较强,工作较可靠。 总之,行星齿轮传动具有质量小、体积小、传动比大及效率高(类型选用得当)等优点。因此,行星齿轮传动现已广泛地应用于工程机械、矿山机械、冶金机械、起重运输机械、轻工机械、石油化工机械、机床、机器人、汽车、坦克、火炮、飞机、轮船、仪器和仪表等各个方面。行星传动不仅适用于高转速、大功率,而且在低速大转矩的传动装置上也已获得了应用。它几乎可适用于一切功率和转速范围,故目前行星传动技术已成为世界各国机械传动发展的重点之一。 随着行星传动技术的迅速发展,目前,高速渐开线行星齿轮传动装置所传递的功率已达到2000KW,输出转矩已达到4500KNm。据有关资料介绍,人们认为目前行星齿轮传动技术的发展方向如下。 齿 轮 系 传 动 比 计 算 1 齿轮系的分类 在复杂的现代机械中,为了满足各种不同的需要,常常采用一系列齿轮组成的传动系统。这种由一系列相互啮合的齿轮(蜗杆、蜗轮)组成的传动系统即齿轮系。下面主要讨论齿轮系的常见类型、不同类型齿轮系传动比的计算方法。 齿轮系可以分为两种基本类型:定轴齿轮系和行星齿轮系。 一、定轴齿轮系 在传动时所有齿轮的回转轴线固定不变齿轮系,称为定轴齿轮系。定轴齿轮系是最基本的齿轮系,应用很广。如下图所示。 二、行星齿轮系 若有一个或一个以上的齿轮除绕自身轴线自转外,其轴线又绕另一个轴线转动的轮系称为行星齿轮系,如下图所示。 1. 行星轮——轴线活动的齿轮. 2. 系杆 (行星架、转臂) H . 3. 中心轮 —与系杆同轴线、 与行星轮相啮合、轴线固定的齿轮 4. 主轴线 —系杆和中心轮所在轴线. 5. 基本构件—主轴线上直接承受 载荷的构件. 行星齿轮系中,既绕自身轴线自转又绕另一固定轴线(轴线O1)公转的齿轮2形象的称为行星轮。支承行星轮作自转并带动行星轮作公转的构件H 称为行星架。轴线固定的齿轮1、3则称为中心轮或太阳轮。因此行星齿轮系是由中心轮、行星架和行星轮三种基本构件组成。显然,行星齿轮系中行星架与两中心轮的几何轴线(O1-O3-OH )必须重合。否则无法运动。 根据结构复杂程度不同,行星齿轮系可分为以下三类: (1)单级行星齿轮系: 它是由一级行星齿轮传动机构构成的轮系。一个行星架及和其上的行星轮及与之啮合的中心轮组成。 (2)多级行星齿轮系:它是由两级或两级以上同类单级行星齿轮传动机构构成的轮系。 (3)组合行星齿轮系:它是由一级或多级以上行星齿轮系与定轴齿轮系组成的轮系。 行星齿轮系 根据自由度的不同。可分为两类: 1450rpm 53.7rpm 行星齿轮混合动力系统的效率 学校,汉城,韩国汉城国立大学机械和航空航天工程于2005年9月26日收到的稿件,并接受修订后,于2006年6月5号出版。 摘要:行星齿轮的混合动力系统(PGHP)被称为最有效的混合动力电动汽车的配置。该系统控制每个混合动力汽车的速度和转矩,以使它可以产生足够的输入和输出的速度。对该机制进行分析以了解关系之间的输入和输出速度。此外传输效率可表示为三个参数的基础上计算的净输入功率的功能。另外,由于能量转换损失,电动机和发电机起到决定性因素,。在市区行驶时间表,发动机的最佳操作的模拟能够获得,这个系统显示改善燃料中占2.2%. 关键词:混合动力电动汽车,行星齿轮,平行系列,传动效率。 1.引言: 其中的各种动力系统的混合动力电动汽车。行星齿轮混合动力系统是最有名的,以其独特的配置和显著的特点著称。这种配置降低了传输损耗,并使车辆运行的zev模式,因此燃油经济性显著改善<1,2>。丰田,星宿,欧宝等车,可以分为这种混合配置。这种类型的混合装置电源也称为混合动力平行系统。另一个术语被称为丰田的混合动力系统(THS),丰田与普锐斯在1997年实现这种类型的配置。普锐斯在燃料经济性以及废料排放等方面表现出色,并在相应的主题性住户调查中一直被称为最有前途的配置。而混合动力电动汽车动力总成等装置需要安装设备如无级变速器,MT,AT,行星齿轮混合动力系统使行星齿轮组合额外产生电机控制输入齿圈的速度和输入发动机转速。通过控制发电机的转速,行星齿轮控制系统可以将发动机所需要的操作点调整到高效率的区域。 下列的讨论主要集中在性能方面,行星齿轮混合动力系统的使用。然而,一旦行星齿轮混合动力系统是分析和等价转换为电控无极变速器等混合动力操作如动力辅助,积极充电,再生制动灯,可以另外考虑包括这些的影响。 2.发电机转速控制分析 2.1:系统布荷 行星齿轮的混合动力系统装置动力总成如图,,它的三轴连接到载体,太阳齿轮,齿圈,载体上的轴连接到发动机可以作为输入轴,另一个输入轴连接到传动轴通过环形齿轮轴减少安全较低的车辆。 MG1图MG2图中描述的一代驱动电机。在很大程度上,该电机消耗电,驱动车辆,和发电机,吸收性机械动力发动机供电的电池或点机。然而,马达可作为发电机时,车辆减速时,发电机消耗电源时,气速度是否定的,在行星齿轮混合动力系统中,元素的车辆限制是在发动机运转所需要的速度下的,限速值的速度比获得如下: 发动机5500 r/min 马达6000 r/min 发电机?5500, 5500 r/min 2.2:速比系统 速比系统的行星齿轮混合动力系统为发电机转速提供输出轴的比率。下面的公式表示的制约关系的行星齿轮和速比的定义 创作编号:BG7531400019813488897SX 创作者:别如克* 行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。 【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 H H W W W -=111W 2 H H W W W -=222W 3 H H W W W -=333 W 4 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--== 差动轮系:2个运动 行星轮系: 3=W , 1 3 10Z Z W W W H H -=-- 11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--== 对于行量轮系:0=B W ∴ AH H A H H A H A B i W W W W W i -=-=--= 110 ∴H AB AH i i -=1 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 行星齿轮传动比计算 行星齿轮传动比计算在《机械设计》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错, ei其实用不着如此,只要理解了传动比的含义,就可以很快地直接写出行星齿轮的传动比,ab ei其关键是掌握几个根据的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这ab 几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 aci,i,1――――――――――――――――――――――――1bc ba aiabxi,bca ―――――――――――――――――――――――――2icx 1ai,bca ――――――――――――――――――――――――――3icb 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子: ei在此例中,要求出,,,如果行星架固定不动的话,这道题目就简单多了,就是一定轴ab aieabxi传动。所以我们要想办法把变成一定轴传动,所以可以根据公式将x 加进去,i,abbcaicx eieaxi,所以可以得出:要想变成定轴传动,就要把x放到上面去,所以这里就要运用第eabibx exi(1,i)eeacaxaeii,,一个公式了,所以所以现在就变成了两个定轴传i, i,1exababbcbai(1,i)bxbe 动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 ZZZ1cee,,,,(1(1))(1)exZZZi,i(1)eacaaxaei,,,,即 exabi,i(1)ZZZZ0bxbedede(1(1))(1),,,,,ZZZZbcbc 再例如下面的传动机构: 已知其各轮的齿数为z=100,z=101,z=100 ,z=99。其输入件对输出件1的传动比i122’ 3H1 311i,i,,这样就把行星传动的计算转换为定轴传动了,所以将齿数代 3HH1H1i(1,i)1H13 行星齿轮机构传动的特点 封箱机的传动最常用的就是行星齿轮传动,那么使用该传动,有什么独有的特点呢? 行星齿轮机构与定轴齿轮机构相比,具有以下特点: 1、行星齿轮机构体积小,重量轻。用行星齿轮机构制成的减速器与普通圆柱齿轮减速器相比,体积可减少四分之一到二分之一。 2、行星齿轮机构承载能力大,工作平稳,船速比大。 3、用行星齿轮机构制成的减速器,其效率达到98%~99%。 4、行星齿轮机构结构复杂,加工精度要求较高。 5、可以实现差动齿轮传动。 由于行星齿轮机构具有上述特点,随着齿轮加工工艺和测量技术的不断完善,行星齿轮机构的应用范围迅速扩大,在自动化生产设备中已得到广泛应用。 按中心轮的数量分类: 如果用K代表中心轮,用H代表转臂,用V代表绕主轴旋转的构件,则按中心轮的数量可将行星齿轮机构分为2K-H行星齿轮机构、3K行星齿轮机构和K-H-V 行星齿轮机构3类。 按活动的自动度分类: 在行星齿轮传动机构中,其中自由度为1的机构称为行星齿轮机构,自由度为2及以上的机构称为差动行星齿轮机构。这种机构在自动化设备中常用做差速器。 行星齿轮传动比计算: 由于行星齿轮机构转动时运动复杂,因而不能使用定轴齿轮机构的传动比计算方法去计算。行星机构传动机构传动比的计算方法有两种,分别为转化机构法和基本计算法。常用的为转化机构法,它应用“一个机构整体的绝对运动并不影响机构内部各构件间的相对运动”这一基本原理,在计算传动化时,先把行星传动转化成定轴传动。 应用转化机构方法计算传动比时应注意:转化机构中各啮合齿轮间传动比的符号,外啮合时为负,内啮合时为正。 为了简化计算原来的转速,最好将固定中心轮的转速放在分母上。在一般的行星齿轮机构中,都有一个与机架固定的中心轮,它们原来的转速应为零。 一级行星减速: V r 为减速机齿圈速度,向量。V c 为减速机1级行星架速度,向量。 V 1为减速机一级太阳齿(驱动齿)速度,向量。表示为: V r=ωr?Rr ; V c=ωc?Rc ; V 1=ω1?R 1 ; Rc=R1+(Rr-R1)/2 =(Rr+R1)/22V c=V r+V 1因此, 2ωc ?Rc =ωr ?Rr +ω1 ?R 1 ; --------- -----①2Rr=M?Zr ;2R1=M?Z 1 ωc ?(Zr+Z1)=ωr ?Zr +ω1 ?Z 1 ; -----------② 二级行星减速: 2级行星架固定,因此有 V r=-V 2 V 2为减速机二级太阳齿(驱动齿)速度,向量。表示为: V r=ωr ?Rr ; V 2=ω2 ?R 2 ; 但因为一级行星齿轮与二级太阳齿角速度相同。 因此, ωr ?Rr =- ω2 ?R 2= - ωc ?R 2; ----------③由齿轮啮合,同理可得: ωr ?Zr = - ωc ?Z 2; -----------------------④由②④整理得: ωr ×Zr= - (ωr ×Zr+ω1 ×Z1) ×Z2/(Zr+Z1) 整理减速比 I =ω1/ ωr =[1+(Zr+Z1)/Z2]×Zr/Z1 行走马达2级行星减速比计算 V r V c V 1 Rr Rc R 1 1级行星减速 V r V 2 Rr R 2 2级行星减速 一级行星减速: V r1为减速机齿圈上半部的速度,向量。V c1为减速机1级行星架速度,向量。 V 1为减速机一级太阳齿(驱动齿)速度,向量。 表示为: V r1=ωr?Rr 1 ; V c1=ωc1?Rc 1 ; V 1=ω1?R 1 ; Rc1=R1+(Rr1-R1)/2 =(Rr1+R1)/2 2V c1=V r1+V 1因此, 2ωc1 ?Rc 1=ωr ?Rr 1+ω1 ?R 1 ; --------- -----①2Rr1=M1?Zr 1 ;2R1=M1?Z 1 ωc1 ?(Zr1+Z1)=ωr ?Zr 1+ω1 ?Z 1 ; -----------② 二级行星减速: V r2为减速机齿圈下半部的速度,向量。 V c2为减速机2级行星架速度,向量。V 2为减速机二级太阳齿速度,向量。表示为: V r2=ωr?Rr 2 ; V c2=ωc2?Rc 2 ; V 2=ωc1?R 2 ; Rc2=R2+(Rr2-R2)/2 =(Rr2+R2)/22V c2=V r2+V 2因此, 2ωc2 ?Rc 2=ωr ?Rr 2+ωc1 ?R 2 ; ---------------③2Rr2=M2?Zr ;2R2=M2?Z 2 ωc2 ?(Zr2+Z2)=ωr ?Zr 2+ωc1 ?Z 2 ; -----------④ 三级行星减速: 3级行星架固定,因此有 V r2=-V 3V 3为减速机三级太阳齿速度,向量。表示为: V r2=ωr ?Rr 2 ; V 3=ωc2 ?R 3 ;因此, ωr ?Rr 2=- ωc2 ?R 3;-----------------------⑤ 由齿轮啮合,同理可得: ωr ?Zr 2= - ωc2 ?Z 3; ----------------------⑥ 由②④⑥整理消去ωc1和ωc2得减速比: I =–ω1/ ωr = [(Zr2+Z2)/Z3+1](Zr1+Z1)Zr2/(Z1×Z2)+Zr1/Z1 行走马达3级行星减速比计算 V r 1 V c 1 V 1 Rr1 Rc1 R 1 1级行星减速 V r2 V 3 Rr2 R 3 3级行星减速 V r2 V c2 V Rr2 Rc2 R 2 2级行星减速 第7章齿轮系的传动比计算 本章主要介绍了轮系的概念及分类;各类轮系传动比的计算方法;轮系的功用;简要介绍了设计行星轮系时,其各轮齿数和行星轮数目的选择问题;以及几种其他的行星传动机构。 7.1 基本要求 1、能正确划分轮系,能正确计算定轴轮系、周转轮系、复合轮系的传动比; 2、对轮系的主要功用有清楚的了解; 3、了解设计行星轮系时,其各轮齿数和行星轮数目的选择应满足的四个条件; 4、对其他行星齿轮传动有一般了解。 7.2重点和难点提示 本章重点: 周转轮系及复合轮系传动比的计算。 本章难点: 根据相对运动原理,将周转轮系转化为假想的“定轴轮系”的方法;如何将复合轮系正确划分为若干个基本轮系。 1、轮系及其分类 由一系列齿轮组成的传动装置称为轮系。 根据轮系运动时其中各个齿轮轴线的位置是否固定,可以将轮系分为定轴轮系、周转轮系及复合轮系三类。 (1)定轴轮系 所有齿轮几何轴线的位置在运转过程中均固定不变的轮系,称为定轴轮系。 (2)周转轮系 在运转过程中至少有一个齿轮的几何轴线位置不固定,而是绕着其它齿轮的固定轴线回转的轮系,称为周转轮系。 在周转轮系中,通常以中心轮或系杆作为运动的输入或输出构件,故又称其为周转轮系的基本构件。基本构件都是绕着同一固定轴线回转的。 根据周转轮系所具有的自由度数目的不同,周转轮系可进一步分为行星轮系和差动轮系两类。行星轮系的自由度为1,差动轮系的自由度为2 。 此外,周转轮系还可根据其基本构件的不同加以分类。设轮系中的中心轮用K表示,系 杆用H表示。若在一个轮系中,基本构件为两个中心轮和系杆H,通常称其为2K-H 型周转轮系。若一个轮系中,基本构件是三个中心轮,而行星架H只起支持行星轮的作用,不行星齿轮机构传动比计算方法
定轴轮系传动比的计算
行星齿轮传动的特点
齿轮系传动比计算
行星齿轮混合动力系统的效率
行星齿轮传动比计算
行星齿轮传动比计算
行星齿轮机构传动的特点
RaTio行星减速比计算
齿轮系地传动比计算
相关主题
文本预览