
数据驱动建模和控制系统设计案例研究
Motor Control Case Study in Data-Driven Modeling and Control Design 迈斯沃克软件公司 作者:PravallikaVinnakota
摘要:本文以简单的直流电机控制系统为例,介绍如何从输入输出数据辨识对象模型,使用辨识的模型来设计控制器并予以实
施。工作流程包括以下步骤:采集数据,辨识线性和非线性对象模型,设计和仿真反馈控制器以及在嵌入式微处理器上实施这些控制器以便实时测试。在物理原型或对象硬件上调节控制器可能造成不安全运行状态甚至损坏硬件。一种更可靠的方法是构建一个对象模型并进行仿真,在不同的运行条件下验证控制器,以便无风险地运行假设情景。当机理建模不可行时,备选方法是通过对象的输入输出数据来开发模型。一个低阶的线性模型可能足以用来设计基本控制器。但较高性能的控制器的详细分析和设计需要一个具有较高精度的模型,且可能是非线性模型。
直流电机:控制设计目标
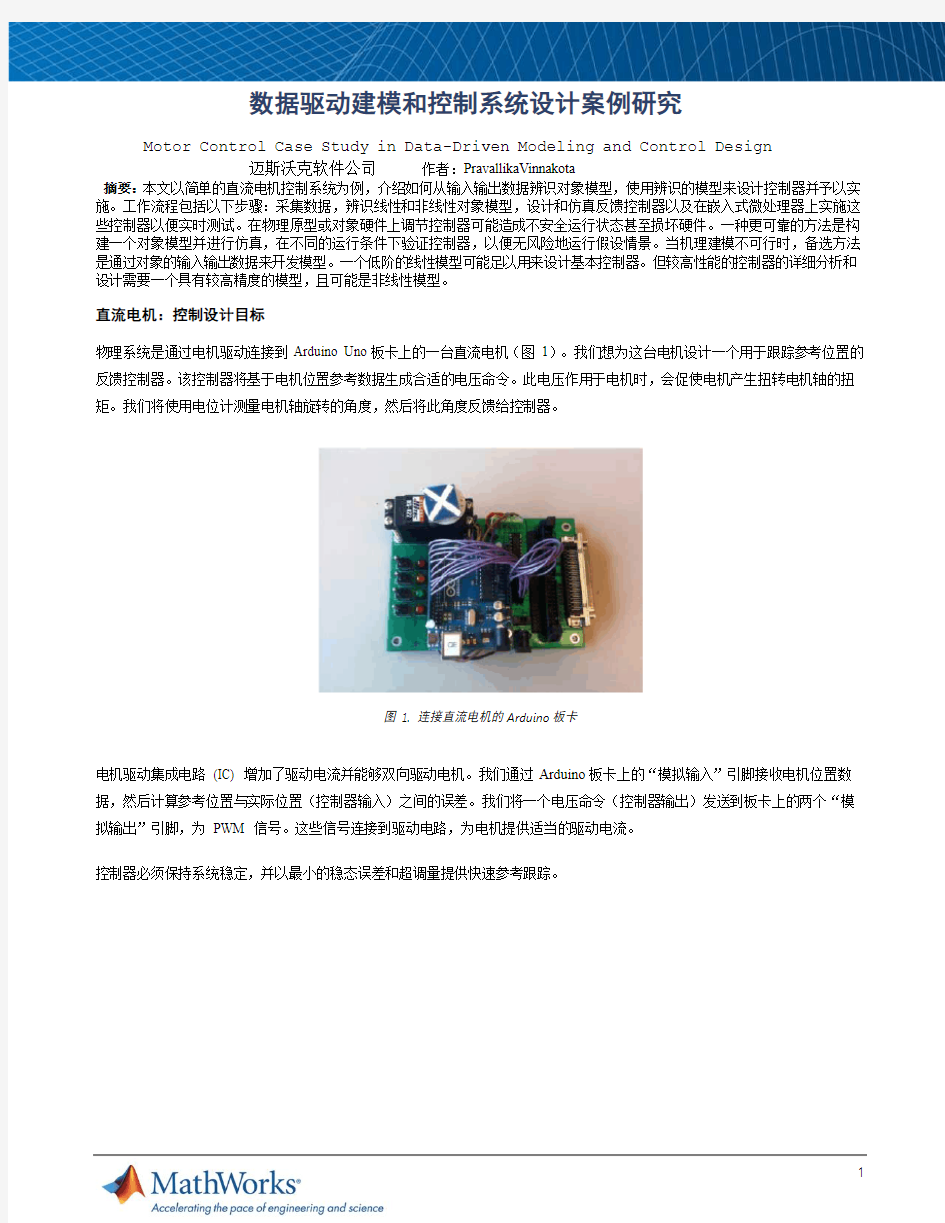
物理系统是通过电机驱动连接到Arduino Uno 板卡上的一台直流电机(图 1)。我们想为这台电机设计一个用于跟踪参考位置的反馈控制器。该控制器将基于电机位置参考数据生成合适的电压命令。此电压作用于电机时,会促使电机产生扭转电机轴的扭矩。我们将使用电位计测量电机轴旋转的角度,然后将此角度反馈给控制器。
电机驱动集成电路 (IC) 增加了驱动电流并能够双向驱动电机。我们通过Arduino 板卡上的“模拟输入”引脚接收电机位置数据,然后计算参考位置与实际位置(控制器输入)之间的误差。我们将一个电压命令(控制器输出)发送到板卡上的两个“模拟输出”引脚,为 PWM 信号。这些信号连接到驱动电路,为电机提供适当的驱动电流。 控制器必须保持系统稳定,并以最小的稳态误差和超调量提供快速参考跟踪。
图 1. 连接直流电机的Arduino 板卡
采集和处理数据
我们使用Simulink 的一项功能将PC 与Arduino 板卡连接,该功能允许您生成一个可执行文件并在选定的硬件上运行。图 2 为与Arduino 硬件结合使用的 Simulink 库。
要收集数据,Arduino 板卡会向电机发送电压命令并测量产生的电机角度。我们创建一个 Simulink 模型来进行数据收集。 PC 机必须与Arduino 板卡通信,发送电压命令并接收返回的角度数据。我们创建第二个模型来启用此通信。
将要在Arduino Uno 板卡上运行的模型中(图 3),MATLAB 函数“Voltage Command To Pins ”从串行端口读取电压命令,并将命令传送给相应的引脚。我们使用串行通信协议来保证主机与Arduino 面板的通信。在CreateMessage 子系统中,将从板卡上其中一个模拟输入引脚中获取的电机位置数据生成完整的串行消息。
图 3. 将要在Arduino 板卡上运行的Simulink 模型
我们通过选择“Tools ”>“Run on Target Hardware ”>“Run
”从模型创建实时应用程序。然后可以使用将要在主机上运行的模型(图 4)采集输入/输出数据。
图 2. Simulink 模块库:与Arduino 目标硬件结合使用
图 4. 将要在主机上运行的模型
我们发送不同的电压来激励系统,然后记录相应的位置数据。仿真结束时,Simulink 中的信号记录功能将在工作间内创建Simulink数据集,这个时间序列对象包含了记录的所有信号。
接下来,我们为估计和验证准备收集到的数据。通过以下命令,我们将数据转换为iddata对象,以便导入到System Identification Toolbox 中的System Identification Tool。
>>logsout
logsout =
Simulink.SimulationData.Dataset
Package: Simulink.SimulationData
Characteristics:
Name: 'logsout'
Total Elements: 2
Elements:
1: 'Voltage'
2: 'Angle'
-Use getElement to access elements by index or name.
-Use addElement or setElement to add or modify elements.
Methods, Superclasses
>> u = logsout.getElement(1).Values.Data;
>> y = logsout.getElement(2).Values.Data;
>> bounds1 = iddata(y,u,0.01,'InputName','Voltage','OutputName','Angle',...
...'InputUnit','V','OutputUnit','deg')
Time domain data set with 1001 samples.
Sample time: 0.01 seconds
Outputs Unit (if specified)
Angle deg
Inputs Unit (if specified)
Voltage V
我们将使用12 个数据集。选择这些数据集用来确保充分激励系统并为模型验证提供充足数据。
从实验数据开发对象模型
使用系统辨识技术开发对象模型涉及模型精度和建模投入之间的权衡。模型越精确,投入的成本越高,计算的时间越长。目标是要找到能充分捕获系统动态的最简单的模型。
我们遵循系统辨识的典型工作流程:首先估计一个简单线性系统,然后估计一个可以更精确表示电机和捕获非线性行为的更详细的非线性模型。尽管线性模型可能足以满足大多数控制器设计的需要,但非线性模型使一系列工作点上的系统行为和控制器设计的仿真更精确。
I II ^ I 1 I
线性系统辨识
首先,我们使用iddata 对象将对象的线性动态模型估为连续的传递函数。我们要为此次估计指定极点和零点的个数。System Identification Toolbox 随后自动确定它们的位置,以最大限度地拟合选定的数据集。 执行以下命令来启动 System Identification Tool >>ident
我们可以使用“Import Data ”下拉菜单(图 5)将数据集从基本工作区导入到工具中。还可以对已导入的数据进行预处理。要启动估计,我们选择将用于辨识模型的工作数据和用来对照测试辨识模型的验证数据。开始时,我们可以使用相同的数据集进行辨识和验证,然后使用其他数据集确认结果。图 5 显示已导入数据集的 System Identification Tool 。用于辨识的数据集,即数据集 11,来自于为避免激励系统中的非线性而设计的实验。
图 5. 已导入数据的 System identification Tool
现在我们可以辨识此数据的连续传递函数。在我们的示例中,我们辨识了一个 2 个极点、无零点连续传递函数(图 6)
图 6. 连续传递函数估算 GUI
我们通过选中 System Identification Tool 中的Model Output 框将辨识模型的仿真响应与实际测量的数据进行比较。辨识的线性模型的响应与辨识数据之间的拟合度达到 93.62%(图 7)
图7.辨识模型响应与辨识数据的比较图
为确保辨识的传递函数代表电机动态,我们必须对照一个独立的数据集进行验证。为进行验证,我们选择数据集12,其中电机的线性运行作为我们的验证数据。我们获得了一个相当理想的拟合度(图8)
图8. 估算模型响应与验证数据的比较图
尽管不是完美拟合,但我们辨识的传递函数在捕获系统动态方面做得非常好。我们可以使用此传递函数设计系统的控制器。
此外,我们还可以分析对象不确定性的影响。使用System Identification Toolbox 获取的模型不仅包含参数值,还包含表示参数不确定性的协方差矩阵。作为对模型可靠性的一种测量,计算的不确定性受影响系统的外部干扰、未建模动态和采集的数据量的影响。我们可以通过在模型响应上绘制不确定性的影响来形象地表现不确定性。例如,我们可以生成辨识传递函数的波特图,显示围绕额定响应的一个标准偏差置信(图9)。
非线性系统辨识
使用从电机运行的线性区域收集的数据创建的电机动态线性模型对于设计有效的控制器十分有用。但是,此对象模型无法捕获电机呈现的非线性行为。例如,数据集 2显示电机在大约 100°时响应饱和,数据集 3 显示电机对于小的电压没有响应,可能是由于存在干摩擦的原因。
在本步骤中,我们将创建一个具有较高精度的直流电机模型。为此,我们为直流电机辨识一个非线性模型。仔细观察数据之后发现,响应的斜率改变与电压的改变并没有线性关系。这种趋势体现了非线性、磁滞的行为。非线性 ARX (NLARX) 模型提供了相当大的灵活性,使我们能够使用丰富的非线性函数(如小波网络和 S 型网络)捕获此类行为。另外,这些模型允许我们整合使用自定义回归发现的系统非线性。
图 9. 显示模型不确定性的辨识模型的波特图
为了有效地构建NLARX 模型,我们需要包含丰富的非线性信息的数据。我们合并了三个数据集来创建辨识数据,合并了其他五个数据集来创建较大的、多实验的验证数据集。
>>mergedD = merge(z7,z3,z6)
Time domain data set containing 3 experiments.
Experiment Samples Sample Time
Exp1 5480 0.01
Exp2 980 0.01
Exp3 980 0.01
Outputs Unit (if specified)
Angle deg
Inputs Unit (if specified)
Voltage V
>>mergedV = merge(z1,z2,z4,z5,z8);
非线性模型具有多个可调整的组分。我们已在非线性函数中调整了模型阶次、延迟、非线性函数类型和单位,添加了代表饱和及死区行为的回归量。数次迭代之后,我们选择一个采用带有并行线性函数的S 型网络的模型结构,并使用回归量的一个子集作为其输入。此模型的参数经过估算,实现了可能最佳的仿真结果(图10)。
最终模型与辨识数据和验证数据出色拟合,拟合度>90%。此模型可以用于控制器设计以及分析和预测。
设计控制器
我们现在可以为较高精度的非线性模型设计一个 PID 控制器。我们首先在一个感兴趣的工作点对辨识的非线性模型进行线性化,然后为此线性化模型设计控制器。 整定PID 控制器,然后选择其参数(图 11)。
图 11. PID 整定界面
我们还要查看此控制器在非线性模型上运行情况。图 12 显示我们用来获取非线性
ARX 模型的仿真响应的 Simulink 模型。
图 10. 非线性 ARX 模型估计GUI
图 12. 用于在辨识的非线性模型上测试控制器的 Simulink 模型
然后,我们比较60°设定位置处的线性和非线性模型的闭环阶跃响应(图 13)。
在硬件上测试控制器
我们创建一个带有控制器的 Simulink 模型,然后利用 Simulink 对于部署模型至目标硬件的内在支持,将该模型运行在Arduino 板卡上(图 14)。
我们通过在某个特定工作点对辨识的非线性 ARX 模型进行线性化来设计控制器。此控制器的结果显示,硬件响应与仿真结果十分接近(图 15)。
图 13. 非线性模型和线性模型阶跃响应的仿真比较图
图 14. 在Arduino 板卡上实施的带有控制器的模型。子系统 Get Angle 从串行端口接收参考信号并将其转换为电机的目标角度。
直流电机子系统配置Arduino 变卡与电机实体的接口
此外,我们还对控制器跟踪随机参考命令的性能进行测试。我们发现,硬件跟踪性能同样十分接近于仿真期间获得的 性能(图 16)。
本示例虽然十分简单,但是抓住了数据驱动控制系统设计的基本步骤。我们从给定的目标硬件收集输入/输出数据,然后使用 System Identification
Toolbox 构建系统模型。我们介绍了如何创建较低和较高精度的模型,以及如何使用这些辨识模型设计控制器。然后,我们在实际硬件上验证了控制器的性能。
QQ :联系人:李潇文
图 15. 对使用线性化模型设计的控制器的阶跃仿真响应和硬件响应比较图
图 16. 对使用估计的非线性模型设计的控制器,在仿真和硬件上的跟踪性能比较图
使用到的产品了解更多
? MATLAB ? 在目标硬件上运行Simulink 模型
? Simulink ? 数据驱动控制:对象模型不可用时如何设计控制器
? Simulink Control Design? 让PID 控制变得轻松
? System Identification Toolbox ? 视频:数据驱动控制:数据采集(4:30)
? 视频:数据驱动控制:系统识别(4:13)
? 视频:数据驱动控制:控制器设计和实施(6:06)
请在https://www.doczj.com/doc/953724175.html,/newsletters上查看和订阅更多文章。
2013 年发布92066v00
数据库如何建模 笔者从98年进入数据库及数据仓库领域工作至今已经有近八年的时间,对数据建模工作接触的比较多,创新性不敢谈,本文只是将工作中的经验总结出来,供大家一同探讨和指正。 提起数据建模来,有一点是首先要强调的,数据建模师和DBA有着较大的不同,对数据建模师来说,对业务的深刻理解是第一位的,不同的建模方法和技巧是为业务需求来服务的。而本文则暂时抛开业务不谈,主要关注于建模方法和技巧的经验总结。 从目前的数据库及数据仓库建模方法来说,主要分为四类。 第一类是大家最为熟悉的关系数据库的三范式建模,通常我们将三范式建模方法用于建立各种操作型数据库系统。 第二类是Inmon提倡的三范式数据仓库建模,它和操作型数据库系统的三范式建模在侧重点上有些不同。Inmon的数据仓库建模方法分为三层,第一层是实体关系层,也即企业的业务数据模型层,在这一层上和企业的操作型数据库系统建模方法是相同的;第二层是数据项集层,在这一层的建模方法根据数据的产生频率及访问频率等因素与企业的操作型数据库系统的建模方法产生了不同;第三层物理层是第二层的具体实现。 第三类是Kimball提倡的数据仓库的维度建模,我们一般也称之为星型结构建模,有时也加入一些雪花模型在里面。维度建模是一种面向用户需求的、容易理解的、访问效率高的建模方法,也是笔者比较喜欢的一种建模方式。 第四类是更为灵活的一种建模方式,通常用于后台的数据准备区,建模的方式不拘一格,以能满足需要为目的,建好的表不对用户提供接口,多为临时表。
下面简单谈谈第四类建模方法的一些的经验。 数据准备区有一个最大的特点,就是不会直接面对用户,所以对数据准备区中的表进行操作的人只有ETL工程师。ETL工程师可以自己来决定表中数据的范围和数据的生命周期。下面举两个例子: 1)数据范围小的临时表 当需要整合或清洗的数据量过大时,我们可以建立同样结构的临时表,在临时表中只保留我们需要处理的部分数据。这样,不论是更新还是对表中某些项的计算都会效率提高很多。处理好的数据发送入准备加载到数据仓库中的表中,最后一次性加载入数据仓库。 2)带有冗余字段的临时表 由于数据准备区中的表只有自己使用,所以建立冗余字段可以起到很好的作用而不用承担风险。 举例来说,笔者在项目中曾遇到这样的需求,客户表{客户ID,客户净扣值},债项表{债项ID,客户ID,债项余额,债项净扣值},即客户和债项是一对多的关系。其中,客户净扣值和债项余额已知,需要计算债项净扣值。计算的规则是按债项余额的比例分配客户的净扣值。这时,我们可以给两个表增加几个冗余字段,如客户表{客户ID,客户净扣值,客户余额},债项表{债项ID,客户ID,债项余额,债项净扣值,客户余额,客户净扣值}。这样通过三条SQL就可以直接完成整个计算过程。将债项余额汇总到客户余额,将客户余额和客户净扣值冗余到债项表中,在债项表中通过(债项余额×客户净扣值/客户余额)公式即可直接计算处债项净扣值。
走向数据驱动的精准教学:教学范式3.0时代来了! 人类正从IT(Information Technology)时代走向DT (Data Technology)时代,大数据作为改变世界的新型科 技力量,正在迅速融入各行各业。作为技术最难“攻克”的传统行业之一,教育在大数据技术与理念的冲击下正在发生着一场“静悄悄的革命”。 随着国家教育信息化战略的持续推进,各级、各类学校的信息化环境得到快速完善,各种学习平台、移动APP、数字 终端、可穿戴设备等开始在中小学逐步流行。数字技术的常态化应用及数字化学习活动的日常开展为教育大数据的生 成提供了得天独厚的条件。伴随着教育数据的持续累积与深度挖掘,大数据在构建新型教学生态、助力教学结构变革、再造教学流程方面的作用日益凸显。一场由经验模仿教学、计算辅助教学转向数据驱动教学的范式变革正在发生。 教学范式3.0 时代:数据驱动教学 教学范式是对教学这一复杂活动的概括性解释,是某个时期或阶段教学综合特征的体现,它既包含教学理论与研究方法,又包含教学模式、学习策略及教学评价方式等。人类社会自诞生以来历经了农业时代、工业时代、信息时代,而教育范式作为社会的子系统也历经了多次重大变革。总的来说,从农业时代开始,教学范式经历了经验模仿教学范式、计算辅
助教学范式及数据驱动教学范式三个阶段。随着时代的变革与范式转型,教育的科学性和技术的智能性也逐渐增强(图1)。 图1 三代教学范式的发展一经验模仿教学范式 经验模仿教学范式是教学史上最古老的教学范式,它起源于希腊教学理念中的“模仿—再现”思想,盛行于农业和工业时代,其核心是将教学视为知识与经验的传递,该阶段的教学着重强调经验的模仿和知识的授受。 17 世纪捷克教育学家夸美纽斯提出“班级教学”之后,班级授课制得到了教育界的广泛认同,迅速成为当时乃至今日最普遍的教学形态。经验模仿教学也随之快速传播,成为教育界最有影响力的教学范式。夸美纽斯曾在《大学教学论》中提出“教育是把一切事物教给一切人类的普遍技术”,该观点认为就像是印刷器能够将知识复制一样,教育也可以把教学者讲授和书本中的知识当成“墨汁”复制给像白纸一样的儿童。夸美纽斯综合了“教授学”和“印刷术”的元素,把这种教学的技术称作“教刷术”,生动地刻画了经验模仿教学范式在知识传递方面的本来面貌。 在经验模仿教学范式下,教学者在整体的教学结构中占据绝对的主导地位,学习者大多扮演被动接受者的角色,教学内容以书本知识、已有经验和技能为主,教学媒介限于纸笔、书本、黑板、粉笔等传统教学工具(图2)。
直流电机驱动与控制系统设计 【摘要】介绍了基于AT89C52单片机,利用光电传感器检测直流电机的转速,采用PWM调速方式,通过AT89C52单片机产生控制信号直接控制驱动芯片LMD18200,从而间接控制直流电机的速度、正反转,以及停止,并可以调节速度至预先设定的速度。 【关键词】直流电机;单片机;lmd18200;PWM调速 直流电机在机器人和各种自动化控制领域发挥着重要的作用,而对电机速度的控制尤其重要,传统的控制系统通常采用模拟元件,如晶体管、各种线性运算电路等,虽在一定程度上满足了生产要求,但线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,从而使系统的运行特性也随之变化,故系统的运行可靠性及准确性得不到保证,甚至出现事故[1]。直流电机的数字控制已经成为了电动机控制的发展趋势,用单片机对电动机进行控制是实现电机数字控制的最常用手段,但是仅仅使用单片机进行控制会使运行程序复杂。为了减小单片机的负担,本文使用专门的直流电机控制芯片LMD18200,设计了一种基于单片机的直流电机驱动控制系统。 1.硬件电路的组成 系统硬件电路结构框图如图1所示,主要包括单片机电路、稳压电路、转速检测电路、转数显示电路、隔离电路、LMD18200驱动电路等。 1.1 稳压电路 硬件系统需要两个不同大小的电压供电。一个电压是所用驱动芯LMD18200电源端口的电压,该电压最大可以使用55V,在该硬件电路中使用的是24V;另一个电压大小为5V,该电压提供给单片机、转数测量电路中的LM393芯片以及隔离电路中的光电耦合芯片6N137。为了减少成本,硬件调试方便及满足设计的合理性,本设计中使用了稳压芯片LM7805,从而实现一个24V电源对整个硬件电路供电。具体电路如图2所示。电路左边接入24V的电经过稳压芯片LM7805将右边输出电压稳定到5V。 1.2 隔离电路 单片机输出的控制信号包括PWM控制信号和转向信号。由于驱动芯片LDM18200的控制信号是由单片机产生的,而驱动芯片输入电压较大,如果电路发生问题,电流就直接流入单片机,这样会对单片机造成损害,为了解决这个问题,在单片机和驱动芯片之间接入隔离电路,从而使单片机和驱动芯片进行隔离。同时考虑到PWM信号频率高[2],高达16.5khz,普通的光电隔离器件不能应用,故选用了高速光电耦合器芯片6N137。以PWM信号为例,转向信号类似,具体电路如图3所示,该种连接方法在传输过程中逻辑状态不变,单片机产生的PWM 信号从芯片6N137的3号引脚输入,从网络标号PWM端输出。 1.3 转速检测电路 采用光电传感器测量直流电机的转速。在直流电机转轴的末端贴上一个黑白交替的塑料卡片,该塑料卡片由三层组成,上下两层由透明塑料组成,中间夹着十张均匀分布的小黑纸。根据光电传感器的工作原理,直流电机转动一周,光电传感器输出引脚输出十个脉冲信号。同时考虑到光电传感器输出的脉冲信号不规则,将其输入到单片机后,不宜于单片机对其识别,因此在光电传感器的输出引脚连接一个由运放芯片LM393组成的脉冲整形电路[3]。具体电路如图4所示,
数据驱动测试设计方法分析 [摘要]软件测试的核心是测试用例的编写,所以测试用例的编写对于软件测试的过程来说是十分重要的,也是每个测试人员必须掌握的技能。本文主要介绍了数据驱动测试的测试方法。尤其重点介绍了数据驱动测试中的逻辑覆盖。并结合实例给出具体说明。 [关键词]测试用例;数据驱动测试;逻辑覆盖 软件测试是软件开发过程中必不可少的部分。从根本上说,测试过程的质量决定了软件测试的质量和有效性。软件测试作为软件生存周期的一个重要组成部分,受到重视程度越来越高。软件测试的本质是针对要测试的内容确定一组测试用例。测试用例是测试工作的指导,是软件测试的必须遵守的准则。更是软件测试质量稳定的根本保障。所以对于软件测试的过程来讲,测试用例的设计是其中最关键的环节。软件测试分功能性测试和结构性测试。功能性测试又称黑盒测试,结构性测试又称白盒测试。下面仅详细介绍功能性测试用例的设计方法。 一、数据驱动测试用例设计 功能性测试又称黑盒测试(Black-box?Testing)或数据驱动测试,是把测试对象看作一个黑盒子。利用黑盒测试法进行动态测试时,需要测试软件产品的功能,不需测试软件产品的内部结构和处理过程。黑盒测试注重于测试软件的功能性需求,也即黑盒测试使软件工程师派生出执行程序有功能需求的输入条件。 黑盒测试试图发现以下类型的错误: 1、功能错误或遗漏; 2、界面错误; 3、数据结构或外部数据库访问错误; 4、性能错误; 5、初始化和终止错误。 二、数据驱动测试的测试用例设计方法 数据驱动测试的测试用例设计方法一般有等价类划分方法,边界值分析方法,错误推测方法,因果图方法,判定表驱动分析方法,正交实验设计方法,功能图分析方法几种。下面详细介绍几种比较重要的黑盒测试方法。 1、等价类划分。
第四章数控机床的驱动与控制系统 第一节位移、速度、位置传感器 数控机床若按伺服系统有无检测装置进行分类,可分为开环系统和闭环(或半环)系统。也就是说检测装置是闭环(半闭环)系统的重要部件之一,它的作用是测量工作实际位移并反馈送至数控装置,使工作台按规定的路径精确移动。因此对于闭环系统来说,检测装置决定了它的定位精度和加工精度。数控机床对检测装置的主要要求为: (1)工作可靠,抗干扰性强; (2)使用维护方便,适应机床的工作环境; (3)满足精度和速度的要求; (4)成本低。 通常,数控装置要求位置检测的分辨率为0.001~0.0lmm;测量精度为±0.002~±0.02mm/m,能满足数控机床以1~l0m/min的最大速度移动. 位置检测装置的分类列表于4-1中。本章仅就其中常用的检测装置(旋转变压器感应同步器光栅、磁栅、编码盘)的结构和原理予以讲述。 旋转变压器
是一种常用的转角检测元件,由于它结构简单,工作可靠,且其精度能满足一般的检测要求,因此被广泛应用在数控机床上。 工作原理 当转子绕组的磁轴与定子绕组的磁轴自垂直位置转动一角度θ时,绕组中产生的感应电势应为 E1=nV1sinθ =nV m sinωt sinθ 式中n——变压比; V1——定子的输入电压; V m——定子最大瞬时电压。 当转子转到两磁轴平行时(即θ=90o),转子绕组中感应电势最大,即 E1=nV m sinωt 旋转变压器的应用 V3=nV m sinωt sinθ1 + nV m cosωt cosθ1 =nV m cos(ωt –θ1) ?感应同步器 感应同步器是一种电磁式位置检测元件,按其结构特点一般可分为直线式和旋转式两种。直线式感应同步器由定尺和滑尺组成;旋转式感应同步器由转子和定子组成。前者用于直线位移的测量,后者用于角度位移的测量。 它们的工作原理都与旋转变压器相似。感应同步器具有检测精度高、抗干扰性强、寿命长、维护方便、成本低、工艺性好等优点,广泛应用于高精度的数控机床。本节主要以直线式感应同步器为例,对其结构特点和工作原理进行讲述。
基于数据驱动自动化测试框架研究和实现 姚杰程光钧李浩 浙江中控技术股份有限公司,浙江杭州,310053 摘要:软件测试是保障软件可靠性,提高软件质量的重要手段。随着软件规模的扩大,软件复杂性的提高,软件测试技术的不断发展,越来越多的测试人员发现传统手工测试成本高、执行繁琐、效率低等特点已远远不能满足现实的需求。为了克服手工测试的这些缺点,自动化测试技术被广泛地引入进来,并逐渐成为软件测试的发展方向。而如何使得软件测试能够实现自动化,为了能够使得自动化测试能够执行方便、易懂、易维护等特性,测试框架的概念也就应运而生,通过框架的概念能够把软件测试过程中的各个关键节点进行拆分,让后通过框架的相互关联性进行测试执行。 关键字:自动化测试,软件测试,软件自动化测试框架,数据驱动。 Research and Achievement of Test Framework Based on Data Driver Automation ChengGuangJun Zhejiang SUPCON Co., Ltd., Hangzhou, Zhejiang, 310053 Abstract:Software test is an important method of ensuring software reliability and improving its quality. As the software scale expanding, the complexity increasing and the test technology developing, test technicians find that the traditionally manual test with high cost, complex execution process and low efficiency cannot meet their requirements any more. Thus, automatic test technology is introduced to solve these problems and becoming a new way in software test development. The concept of test frame is produced to realize the automation of software test and endow it with features of convenient execution, easy to understand and fast maintenance. The concept analyzes the key nodes of test process and performs the test execution through multi-connection. Key words: Aout Test,Softwar Test, Soft Aouttest Plamform,Data Driver.
电机驱动控制系统 摘要 由于单片机具有体积小、集成度高、运算速度快、运行可靠、应用灵活、价格低廉以及面向控制等特点,因此在工业控制、数据采集、智能仪器仪表、智能化设备和各种家用电器等领域得到广泛的应用,而且发展非常迅猛。随着单片机应用技术水平不断提高,目前单片机的应用领域已经遍及几乎所有的领域。 与交流电动机相比,直流电机结构复杂、成本高、运行维护困难,但是直流电机具有良好的调速性能、较大的启动转矩和过载能力强等许多优点,因此在许多行业仍大量应用。近年来,直流电动机的机构和控制方式都发生了很大的变化。随着计算机进入控制领域以及新型的电力电子功率元器件的不断出现,采用全控型的开关功率元件进行脉宽调制(Pulse Width Modulation,简称PWM)已成为直流电机新的调速方式。这种调速方法具有开关频率高、低速运行稳定、动态性能良好、效率高等优点,更重要的是这种控速方式很容易在单片机控制系统中实现,因此具有很好的发展前景。 本设计为单片机控制直流电机,以AT89C51单片机为核心,采用了PWM技术对电机进行控制,通过对占空比的计算达到精确调速的目的。由键盘控制电动机执行启停、速度和方向等各种功能,用红外对管测量电机的实际转速,并通过1602液晶显示出控制效果。设计上,键盘输入采用阵列式输入,用4*4的矩阵键盘形式,这样可以有效的减少对单片机I/O口的占用。
关键词:AT89C51 PWM 电机测速 一、硬件设计 1、总体设计
20 929303456781011121314151617318RFB 91112 10k 23
1918 2122232425262728 1.2.2 1602液晶显示模块 本模块实现了转速等显示功能。 D :方向;占空比;预设转速;实测速度; 1.2.3键盘模块 根据实验要求,需由按键完成对直流电机的控制功能,并经分 析得出需要16个按键,为节省I/O 口并配合软件设计,此模块使用了4*4的矩阵模式。并通过P1口与主机相连。 1.2.4 PWM 驱动电路模块设计与比较
目录 1.数据驱动价值:驱动决策、驱动产品智能 2.数据驱动闭环:数据采集—数据建模—数据分析—数据反馈 3.数据驱动各环节方法与实践 一、数据驱动价值:驱动决策、驱动产品智能 数据驱动能做什么? 我们认为主要包含驱动决策、驱动产品智能两方面的价值。 图1 数据驱动价值 驱动决策包括运营监控、产品迭代、营销分析、商业决策。 其中涉及的每一个场景在今年数据驱动大会都会有专门的讲师来介绍。 驱动产品智能,现在基本上已成为所有的电商类、资讯类产品的标配,如“产品推荐”、“猜你喜欢”等。企业要么组建团队实现智能化的应用场景,要么应用外部工具来解决问题,因为在流量红利逐渐消失的今天,千篇一律的内容会让你的“留存”数字非常难看。 我们曾为某一家很知名资讯类企业做Feed 流的改版,神策来提供具体的推荐策略。通常,个性化推荐的评价指标是CTR——展现了一千种内容,有多少人点击? 在2018 年,我们认为再评价一个算法的好坏,用CTR 非常不合适。神策从关注指标CTR 转为衡量“命中了策略的人”跟“命中热门随机内容”的两大用户群体,观察他们在平均访问深度、7 日留存、停留时长等更深层指标上的差异。
二、数据驱动闭环 数据采集——数据建模——数据分析——数据反馈,这是一个完整的数据驱动闭环。我们在很多场合提到此,这里不再赘述。 PPT 下载| 神策数据曹犟:数据驱动从方法到实践 图2 数据驱动闭环 有很多企业来找我做关于数据采集方面的分享,我用这张图描述了典型的数据分析平台,一个为数据驱动而构建的数据分析平台,各位可以参考。 PPT 下载| 神策数据曹犟:数据驱动从方法到实践
数据驱动建模和控制系统设计案例研究 Motor Control Case Study in Data-Driven Modeling and Control Design 迈斯沃克软件公司 作者:PravallikaVinnakota 摘要:本文以简单的直流电机控制系统为例,介绍如何从输入输出数据辨识对象模型,使用辨识的模型来设计控制器并予以实 施。工作流程包括以下步骤:采集数据,辨识线性和非线性对象模型,设计和仿真反馈控制器以及在嵌入式微处理器上实施这些控制器以便实时测试。在物理原型或对象硬件上调节控制器可能造成不安全运行状态甚至损坏硬件。一种更可靠的方法是构建一个对象模型并进行仿真,在不同的运行条件下验证控制器,以便无风险地运行假设情景。当机理建模不可行时,备选方法是通过对象的输入输出数据来开发模型。一个低阶的线性模型可能足以用来设计基本控制器。但较高性能的控制器的详细分析和设计需要一个具有较高精度的模型,且可能是非线性模型。 直流电机:控制设计目标 物理系统是通过电机驱动连接到Arduino Uno 板卡上的一台直流电机(图 1)。我们想为这台电机设计一个用于跟踪参考位置的反馈控制器。该控制器将基于电机位置参考数据生成合适的电压命令。此电压作用于电机时,会促使电机产生扭转电机轴的扭矩。我们将使用电位计测量电机轴旋转的角度,然后将此角度反馈给控制器。 电机驱动集成电路 (IC) 增加了驱动电流并能够双向驱动电机。我们通过Arduino 板卡上的“模拟输入”引脚接收电机位置数据,然后计算参考位置与实际位置(控制器输入)之间的误差。我们将一个电压命令(控制器输出)发送到板卡上的两个“模拟输出”引脚,为 PWM 信号。这些信号连接到驱动电路,为电机提供适当的驱动电流。 控制器必须保持系统稳定,并以最小的稳态误差和超调量提供快速参考跟踪。 图 1. 连接直流电机的Arduino 板卡
用户画像数据建模方法 从1991年Tim Berners-Lee发明了万维网(World Wide Web)开始,到20年后2011年,互联网真正走向了一个新的里程碑,进入了“大数据时代”。经历了12、13两年热炒之后,人们逐渐冷静下来,更加聚焦于如何利用大数据挖掘潜在的商业价值,如何在企业中实实在在的应用大数据技术。伴随着大数据应用的讨论、创新,个性化技术成为了一个重要落地点。相比传统的线下会员管理、问卷调查、购物篮分析,大数据第一次使得企业能够通过互联网便利地获取用户更为广泛的反馈信息,为进一步精准、快速地分析用户行为习惯、消费习惯等重要商业信息,提供了足够的数据基础。伴随着对人的了解逐步深入,一个概念悄然而生:用户画像(UserProfile),完美地抽象出一个用户的信息全貌,可以看作企业应用大数据的根基。 一、什么是用户画像? 男,31岁,已婚,收入1万以上,爱美食,团购达人,喜欢红酒配香烟。 这样一串描述即为用户画像的典型案例。如果用一句话来描述,即:用户信息标签化。 如果用一幅图来展现,即: 二、为什么需要用户画像 用户画像的核心工作是为用户打标签,打标签的重要目的之一是为了让人能够理解并且方便计算机处理,如,可以做分类统计:喜欢红酒的用户有多少?喜欢红酒的人群中,男、女比例是多少? 也可以做数据挖掘工作:利用关联规则计算,喜欢红酒的人通常喜欢什么运动品牌?利用聚类算法分析,喜欢红酒的人年龄段分布情况?
大数据处理,离不开计算机的运算,标签提供了一种便捷的方式,使得计算机能够程序化处理与人相关的信息,甚至通过算法、模型能够“理解” 人。当计算机具备这样的能力后,无论是搜索引擎、推荐引擎、广告投放等各种应用领域,都将能进一步提升精准度,提高信息获取的效率。 三、如何构建用户画像 一个标签通常是人为规定的高度精炼的特征标识,如年龄段标签:25~35岁,地域标签:北京,标签呈现出两个重要特征:语义化,人能很方便地理解每个标签含义。这也使得用户画像模型具备实际意义。能够较好的满足业务需求。如,判断用户偏好。短文本,每个标签通常只表示一种含义,标签本身无需再做过多文本分析等预处理工作,这为利用机器提取标准化信息提供了便利。 人制定标签规则,并能够通过标签快速读出其中的信息,机器方便做标签提取、聚合分析。所以,用户画像,即:用户标签,向我们展示了一种朴素、简洁的方法用于描述用户信息。 3.1 数据源分析 构建用户画像是为了还原用户信息,因此数据来源于:所有用户相关的数据。 对于用户相关数据的分类,引入一种重要的分类思想:封闭性的分类方式。如,世界上分为两种人,一种是学英语的人,一种是不学英语的人;客户分三类,高价值客户,中价值客户,低价值客户;产品生命周期分为,投入期、成长期、成熟期、衰退期…所有的子分类将构成了类目空间的全部集合。 这样的分类方式,有助于后续不断枚举并迭代补充遗漏的信息维度。不必担心架构上对每一层分类没有考虑完整,造成维度遗漏留下扩展性隐患。另外,不同的分类方式根据应用场景,业务需求的不同,也许各有道理,按需划分即可。 本文将用户数据划分为静态信息数据、动态信息数据两大类。 静态信息数据 用户相对稳定的信息,如图所示,主要包括人口属性、商业属性等方面数据。这类信息,自成标签,如果企业有真实信息则无需过多建模预测,更多的是数据清洗工作,因此这方面信息的数据建模不是本篇文章重点。
电机驱动控制系统 “安邦信”是中国变频器行业的一块老品牌,在技术上沉淀了二十几年,在产、学、研、市场应用的道路上积累深厚的经验。1992年3月在江苏徐州成立,1998年10月迁址深圳,更名为“深圳市安邦信电子有限公司”是第一批国家电子工业部20家变频器企业之一,专注于变频器的研发、生产和销售,快速为客户提供个性化的解决方案。 “安邦信”是国内少数同时生产高、中、低压变频器的企业,主要服务于装备制造业、节能环保、新能源三大领域,营销网络遍布全国。公司在国产品牌厂商中名列前茅,其中专用变频系列产品在多个细分行业处于业内首创或领先地位。 “安邦信”旗下的电机科技有限公司,具有30年多年专注工业电动机与汽车电机的研发、制造历史。拥有先进自动化生产线和专业检测设备,拥有资深的专业电机设计、工艺,工装设计工程师。 多年来,始终坚持“产品做精、市场做专”的经营方针。投重金搭建研发平台,精诚与多所院校建立研发联盟。获得了各种技术专利100多项,掌握了永磁同步、异步、电流开环、闭环矢量控制与485、CAN、PROFIBUS通讯的技术。完成了40V-1000V电压等级,0.4KW-8700KW功率等级产品供货能力。市场横跨电动汽车、工业控制两大行业领域,在电动汽车领域具有永磁电机、异步电机控制,40V-560V电压等级、1.5KW-250KW功率范围,风冷、水冷、油冷全系列的产品供应。当前生产的电动车电机有高效永磁同步电机,高效铜转子异步电机,高效鼠笼式异步电机三大系列。 “安邦信”制造基地根据公司的研发优势,大量采用自动化生产设备,生产设备及仪器业内领先,空间布局,生产线结构都依据国际标准设计,年产能超过15万台。 规范的流程,先进的设备,敬业的员工是安邦信制造体系的核心竞争力,严谨而人性化的生产管理实现了大规模生产效应。 电机驱动控制系统产品 “安邦信”针对市场的需求研发出电机驱动控制系统产品,形成一套驱控体系,为整车厂提供电机驱控系统解决方案,提高整车效率。其中72V,7.5KW和144V,15KW系列产品,经过市场验证,深受好评获得客户良好认可。 7.5KW和15KW电机驱动控制器系统,电机驱动控制系统具有高峰值转矩、高可靠性、低成本的特点。同时具有高效异步铜转子电机采用双冷技术,同步降低电机定转子温度,电机具有高效、高功率密度、
第四章数控机床的驱动与控制系统学 时 章节教学内容重点、难点 2 §4-1 位移、速度、位置传感器理解其应用情况 1 §4- 2 进给伺服驱动系统 4 §4-3.1 典型进给伺服系统(位置控制) ——步进式伺服系统 掌握系统的组成及工作 原理 1 §4-3. 2 闭环、半闭环进给伺服系统 第一节位移、速度、位置传感器 数控机床若按伺服系统有无检测装置进行分类,可分为开环系统和闭环(或半环)系统。也就是说检测装置是闭环(半闭环)系统的重要部件之一,它的作用是测量工作实际位移并反馈送至数控装置,使工作台按规定的路径精确移动。因此对于闭环系统来说,检测装置决定了它的定位精度和加工精度。数控机床对检测装置的主要要求为: (1)工作可靠,抗干扰性强; (2)使用维护方便,适应机床的工作环境; (3)满足精度和速度的要求; (4)成本低。 通常,数控装置要求位置检测的分辨率为0.001~0.0lmm;测量精度为±0.002~±0.02mm/m,能满足数控机床以1~l0m/min的最大速度移动. 位置检测装置的分类列表于4-1中。本章仅就其中常用的检测装置(旋转变压器感应同步器光栅、磁栅、编码盘)的结构和原理予以讲述。 旋转变压器 位置检测装置分类
是一种常用的转角检测元件,由于它结构简单,工作可靠,且其精度能满足一般的检测要求,因此被广泛应用在数控机床上。 ?工作原理 当转子绕组的磁轴与定子绕组的磁轴自垂直位置转动一角度θ时,绕组中产生的感应电势应为 E1=nV1sinθ =nV m sinωt sinθ 式中n——变压比; V1——定子的输入电压; V m——定子最大瞬时电压。 当转子转到两磁轴平行时(即θ=90o),转子绕组中感应电势最大,即 E1=nV m sinωt ?旋转变压器的应用 V3=nV m sinωt sinθ1 + nV m cosωt cosθ1 =nV m cos(ωt –θ1) ?感应同步器 感应同步器是一种电磁式位置检测元件,按其结构特点一般可分为直线式和旋转式两种。直线式感应同步器由定尺和滑尺组成;旋转式感应同步器由转子和定子组成。前者用于直线位移的测量,后者用于角度位移的测量。 它们的工作原理都与旋转变压器相似。感应同步器具有检测精度高、抗干扰性强、寿命长、维护方便、成本低、工艺性好等优点,广泛应用于高精度的数控机床。本节主要以直线式感应同步器为例,对其结构特点和工作原理进行讲述。
数据驱动测试 数据驱动测试 黑盒测试(Black-box Testing,又称为功能测试或数据驱动测试)是把测试对象看作一个黑盒子。利用黑盒测试法进行动态测试时,需要测试软件产品的功能,不需测试软件产品的内部结构和处理过程。 采用黑盒技术设计测试用例的方法有:等价类划分、边界值分析、错误推测、因果图和综合策略。 黑盒测试注重于测试软件的功能性需求,也即黑盒测试使软件工程师派生出执行程序所有功能需求的输入条件。黑盒测试并不是白盒测试的替代品,而是用于辅助白盒测试发现其他类型的错误。 黑盒测试试图发现以下类型的错误: 1)功能错误或遗漏; 2)界面错误; 3)数据结构或外部数据库访问错误; 4)性能错误; 5)初始化和终止错误。 一、黑盒测试的测试用例设计方法 ·等价类划分方法 ·边界值分析方法 ·错误推测方法 ·因果图方法 ·判定表驱动分析方法 ·正交实验设计方法 ·功能图分析方法 等价类划分: 是把所有可能的输入数据,即程序的输入域划分成若干部分(子集),然后从每一个子集中选取少数具有代表性的数据作为测试用例.该方法是一种重要的,常用的黑盒测试用例设计方法. 1) 划分等价类: 等价类是指某个输入域的子集合.在该子集合中,各个输入数据对于揭露程序中的错误都是等效的.并合理地假定:测试某等价类的代表值就等于对这一类其它值的测试.因此,可以把全部输入数据合理划分为若干等价类,在每一个等价类中取一个数据作为测试的输入条件,就可以用少量代表性的测试数据.取得较好的测试结果.等价类划分可有两种不同的情况:有效等价类和无效等价类. 有效等价类:是指对于程序的规格说明来说是合理的,有意义的输入数据构成的集合.利用有效等价类可检验程序是否实现了规格说明中所规定的功能和性能.
零售银行为了给客户提供更加优质的服务,需要通过分析银行系统本身数据库所保留的客户资料信息,对客户进行分类管理。 近年来,大数据已成为科技界和企业界关注的热点,越来越多的企业和研究者正在关注大数据的应用。大数据的分析与挖掘技术在科学界正在如火如荼的展开,各种大数据的新算法被开发研究出来,例如近年来发展比较完善的一种数据分析挖掘算法支持向量机。 与此同时,大数据分析在商业中的运用受到人们的追捧,各种大数据在商业中成功运用的案例层出不穷,比如美国大型零售商target公司的广告精准推送。本文将对大数据分析技术以及大数据分析技术在零售银行行业的作用进行一番探讨。 什么是大数据 2011年,麦肯锡在题为《海量数据,创新、竞争和提高生成率的下一个新领域》的研究报告中首次提出大数据的概念。报告认为数据已经渗透到每一个行业和业务职能领域,数据中蕴含着巨大的价值,这些价值将导致数据成为重要的生产因素。2012年《纽约时报》的一篇专栏中写到,“大数据”时代已经降临,在商业、经济及其他领域中,最终决策将日益基于数据和分析而作出,而并非基于经验和直觉。2012年3月,美国奥巴马政府宣布投资2亿美元启动“大数据研究和发展计划”,这是继1993年美国宣布“信息高速公路”计划后的又一次重大科技发展部署。美国政府认为大数据是“未来的新石油”,将“大数据研究”上升为国家意志,对未来的科技与经济发展必将带来深远影响。 进入21世纪,互联网的兴起促成了数据量的大规模增长。互联网时代,几乎全民都在制造数据,与此同时,数据的形成也极其丰富。一方面,既有社交网络、多媒体、协同创造、虚拟服务等应用所主动产生的数据;另一方面,又有搜索引擎、网页浏览过程中被记录、被收集的数据。该阶段数据的特点是用户原创、主动、交互。 根据国际数据公司(IDC)的研究报告,2011年全球被创建和被复制的数据总量为1.8ZB(数据存储单位,泽字节,等于 1024艾字节或270个字节),且增长趋势遵循新摩尔定律,预计到2020年,全球数据量大约每两年翻一番,全球将拥有35ZB 的数据量。正是由于信息技术的发展,大数据才能生成和发展。大数据技术正是从海量的、多样化的数据中,快速获得有价值信息的能力。
半导体器件应用网 https://www.doczj.com/doc/953724175.html,/news/195205_p1.html 电机驱动和控制系统的测试 【大比特导读】国际能源机构IEA曾经声称全球45%的电能是电机所消耗 的。在中国,这个比例是54%。这一方面反映了电机的使用是如此广泛,另一方 面也敦促业界开发和使用更高效的电机。为了满足机电工程师对电机驱动和控制 系统的测试需求,力科公司新推出基于8通道、12bit示波器的电机驱动和控制 系统测试平台HDO8000。 一.引言 国际能源机构IEA曾经声称全球45%的电能是电机所消耗的。在中国,这个比例是54%。这 一方面反映了电机的使用是如此广泛,另一方面也敦促业界开发和使用更高效的电机。为了 满足机电工程师对电机驱动和控制系统的测试需求,力科公司新推出基于8通道、12bit示 波器的电机驱动和控制系统测试平台HDO8000。 二. 电机测试需求分析 下图是一个典型的电机驱动和控制系统框图,大致分为功率驱动部分、电机控制部分、电机 和传感器部分。
图 2一个典型的电机驱动和控制系统 功率驱动部分 图 2中的功率驱动部分是一个典型的级联H-bridge驱动电路。将其放大到图 3显示: 图 3 H-bridge驱动电路 H-bridge驱动电路的输入为三相交流电,经过整流后变成直流电压(DC bus)。6个功率管组成的桥式电路将直流电压逆变为三相PWM信号输出给电机。 对于这一部分进行功率分析是电机测试最重要的内容。主要关注输入端的功率测量,输出端的功率测量,以及功率转换效率。
其次桥式电路的调试和验证也是必不可少的,这通常涉及对6个功率管的驱动电压、漏源电压和电流的测量。 电机控制部分 电机控制部分通常是一个嵌入式系统,核心是DSP或MCU,主要负责执行电机驱动算法、采集电机反馈信号以及和其他系统的通信接口。对这部分的测试涉及常规的数字电路测试,接口电路测试等。 电机和传感器 对电机的测试主要关注输入的电气功率、其实就是功率驱动部分的输出功率,电机输出的机械参数,即转速、扭矩、方向等,这些机械参数通常可由传感器输出。 三. 测试功能 为了满足上述的测试需求,力科公司推出的8通道、12bit示波器HDO8000系列能够提供以下测试功能: 1. 功率分析 在《利用八通道示波器分析三相交流电》一文中,我们已经了解到如何用示波器测试三相电的有功功率、无功功率、视在功率以及功率因数等参数,对于电机功率驱动电路的输入和输出功率的测量也是相同原理。为了适应多种供电方式,HDO8000能够测量五种接线方式:单相两线制、单相三线制、三相三线制(两瓦特计和三瓦特计)、三相四线制。仪器界面会给出连线示意图,指导使用者如何连接被测信号。同时也提供火线-火线电压到火线-零线电压的转换。图 4是设置界面示意。 图 4 电机功率测试设置界面示意 功率参数的测试结果能以表格方式显示在仪器界面上,如下图所示。
九种形式的大数据建模 数据挖掘是利用业务知识从数据中发现和解释知识(或称为模式)的过程,这种知识是以自然或者人工形式创造的新知识。 当前的数据挖掘形式,是在20世纪90年代实践领域诞生的,是在集成数据挖掘算法平台发展的支撑下适合商业分析的一种形式。也许是因为数据挖掘源于实践而非理论,在其过程的理解上不太引人注意。20世纪90年代晚期发展的CRISP-DM,逐渐成为数据挖掘过程的一种标准化过程,被越来越多的数据挖掘实践者成功运用和遵循。 虽然CRISP-DM能够指导如何实施数据挖掘,但是它不能解释数据挖掘是什么或者为什么适合这样做。在本文中我将阐述我提出数据挖掘的九种准则或“定律”(其中大多数为实践者所熟知)以及另外其它一些熟知的解释。开始从理论上(不仅仅是描述上)来解释数据挖掘过程。
我的目的不是评论CRISP-DM,但CRISP-DM的许多概念对于理解数据挖掘是至关重要的,本文也将依赖于CRISP-DM的常见术语。CRISP-DM仅仅是论述这个过程的开始。 它定义了数据挖掘的主题:数据挖掘关注解决业务业问题和实现业务目标。数据挖掘主要不是一种技术,而是一个过程,业务目标是它的的核心。没有业务目标,没有数据挖掘(不管这种表述是否清楚)。因此这个准则也可以说成:数据挖掘是业务过程。 这里定义了数据挖掘过程的一个关键特征。CRISP-DM的一种朴素的解读是业务知识仅仅作用于数据挖掘过程开始的目标的定义与最后的结果的实施,这将错过数据挖掘过程的一个关键属性,即业务知识是每一步的核心。为了方便理解,我使用CRISP-DM阶段来说明: 商业理解必须基于业务知识,所以数据挖掘目标必须是业务目标的映射(这种映射也基于数据知识和数据挖掘知识); 数据理解使用业务知识理解与业务问题相关的数据,以及它们是如何相关的; 数据预处理就是利用业务知识来塑造数据,使得业务问题可以被提出和解答(更详尽的第三条—准备律); 建模是使用数据挖掘算法创建预测模型,同时解释模型和业务目标的特点,也就是说理解它们之间的业务相关性; 评估是模型对理解业务的影响; 实施是将数据挖掘结果作用于业务过程; 总之,没有业务知识,数据挖掘过程的每一步都是无效的,也没有“纯粹的技术”步骤。业务知识指导过程产生有益的结果,并使得那些有益的结果得到认可。数据挖掘是一个反复的过程,业务知识是它的核心,驱动着结果的持续改善。
【数据分析技术系列】 之数据建模的几大模式 目录 第一,目标律:业务目标是所有数据解决方案的源头。 (1) 第二,知识律:业务知识是数据挖掘过程每一步的核心。 (1) 第三,准备律:数据预处理比数据挖掘其他任何一个过程都重要。 2第四,试验律(NFL律:NO FREE LUNCH):对于数据挖掘者来说,天下没有免费的午餐,一个正确的模型只有通过试验(EXPERIMENT)才能被发现。 (3) 第五,模式律(大卫律):数据中总含有模式。 (4) 第六,洞察律:数据挖掘增大对业务的认知。 (5) 第七,预测律:预测提高了信息泛化能力。 (6) 第八,价值律:数据挖掘的结果的价值不取决于模型的稳定性或预测的准确性。 (6) 第九,变化律:所有的模式因业务变化而变化。 (7)
数据建模指的是对现实世界各类数据的抽象组织,确定数据库需管辖的范围、数据的组织形式等直至转化成现实的数据库。将经过系统分析后抽象出来的概念模型转化为物理模型后,在visio或erwin等工具建立数据库实体以及各实体之间关系的过程。数据挖掘是利用业务知识从数据中发现和解释知识(或称为模式)的过程,这种知识是以自然或者人工形式创造的新知识。 当前的数据挖掘形式,是在20世纪90年代实践领域诞生的,是在集成数据挖掘算法平台发展的支撑下适合商业分析的一种形式。也许是因为数据挖掘源于实践而非理论,在其过程的理解上不太引人注意。20世纪90年代晚期发展的跨行业数据挖掘标准流程,逐渐成为数据挖掘过程的一种标准化过程,被越来越多的数据挖掘实践者成功运用和遵循。 虽然‘跨行业数据挖掘标准流程’能够指导如何实施数据挖掘,但是它不能解释数据挖掘是什么或者为什么适合这样做。在本文中将阐述提出数据挖掘的九种准则或“定律”以及另外其它一些熟知的解释。开始从理论上来解释数据挖掘过程。 第一,目标律:业务目标是所有数据解决方案的源头。 定义了数据挖掘的主题:数据挖掘关注解决业务业问题和实现业务目标。数据挖掘主要不是一种技术,而是一个过程,业务目标是它的的核心。没有业务目标,没有数据挖掘(不管这种表述是否清楚)。因此这个准则也可以说成:数据挖掘是业务过程。 第二,知识律:业务知识是数据挖掘过程每一步的核心。 这里定义了数据挖掘过程的一个关键特征。CRISP-DM的一种朴素的解读是业务知识仅仅作用于数据挖掘过程开始的目标的定义与最后的结果的实施,这将错过数据挖掘过程的一个关键属性,即业务知识是每一步的核心。 商业理解必须基于业务知识,所以数据挖掘目标必须是业务目标的映射(这种映射也基于数据知识和数据挖掘知识); 数据理解使用业务知识理解与业务问题相关的数据,以及它们是如何相关的; 数据预处理就是利用业务知识来塑造数据,使得业务问题可以被提出和解答(更详尽的第三条—准备律); 建模是使用数据挖掘算法创建预测模型,同时解释模型和业务目标的特点,也就是说理解它们之间的业务相关性; 评估是模型对理解业务的影响; 实施是将数据挖掘结果作用于业务过程。
目录 1 仓库底层模型重构 ............................................................................................................................ 1 1.1.1.1 数据仓库建模基本理论.......................................................................... 1 1.1.1.2 大数据平台下数据仓库设计思路 ........................................................... 6 1.1.1.3 整合层数据处理思路.......................................................................... 27 1.1.1.4 整合层主题模型设计关注点............................................................... 28 1.1.1.5 整合层主题模型算法选择 .................................................................. 30 1.1.2 核心模型改造方案......................................................................................................... 31 1.1. 2.1 新核心模型重构设计思路 .................................................................. 31 1.1. 2.2 新核心模型设计................................................................................. 32 1.1. 2.3 老核心模型中历史数据迁移............................................................... 34 1.1. 2.4 新老核心模型同步运行...................................................................... 35 1.1. 2.5 下游应用切换到新核心模型............................................................... 35 1.1. 2.6 老核心模型归档下线.......................................................................... 35 1.1.3 共性加工层重构方案..................................................................................................... 35 1.1.3.1 方案概述............................................................................................ 35 1.1.3.2 分层设计方案..................................................................................... 36 1.1.3.3 数据保留规则..................................................................................... 36