第五章 状态反馈与状态观测器
线性反馈控制系统
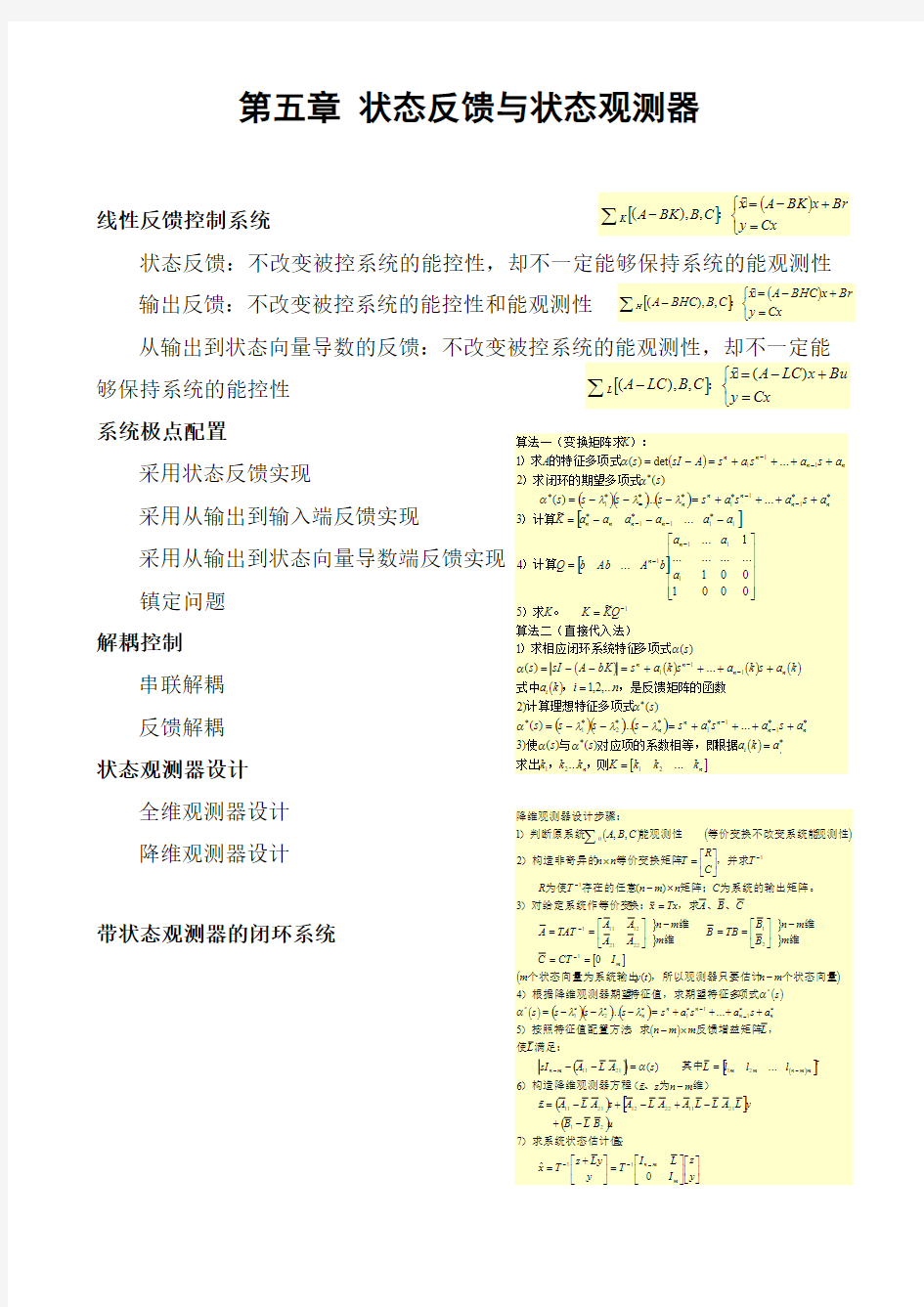
状态反馈:不改变被控系统的能控性,却不一定能够保持系统的能观测性
输出反馈:不改变被控系统的能控性和能观测性
从输出到状态向量导数的反馈:不改变被控系统的能观测性,却不一定能够保持系统的能控性 系统极点配置
采用状态反馈实现
采用从输出到输入端反馈实现 采用从输出到状态向量导数端反馈实现
镇定问题 解耦控制
串联解耦 反馈解耦 状态观测器设计
全维观测器设计 降维观测器设计
带状态观测器的闭环系统
[]()?
??=+-=-∑Cx
y Br
x BK A x C B BK A K
:,),([]()?
??=+-=-∑Cx
y Br
x BHC A x C B BHC A H
:,),([]???
=+-=-∑Cx
y Bu x LC A x
C B LC A L
)(,),( :
电流模式控制反激变换器反馈环路的设计 首先要搞清系统稳定所必需的几个条件: 系统稳定的原则: A,系统环路总增益在穿越频率(或叫剪切频率,截止频率,交越频率,带宽都是它)处的增益为1或0Db。高的穿越频率能保正电源快速响应线性和负载的突变,穿越频率受 到开关频率的限制,根据采样定理穿越频率必需小于开关频率的一半,因为开关频率可以在输出端开出来,但这个频率必须不被反馈环传递,否则系统将会振荡并如此恶性循环。实际应用中一般取开关频率的1/4或1/5。 B,在系统在穿越频率处的总相位延迟必需小于(360-45)315度。 45度为相位裕量。当相位裕量大于45度时,能提供最好的动态响应,高的相位裕量能阻尼振荡并缩短瞬态调节时间获得最少的过冲。 C,系统的开环增益曲线在穿越频率附近的斜率应为-1过0Db。 因为具有-1增益斜率的电路,相位延迟不会超过90度(这里指的是系统总的开环增益曲线)。 要满足上面的三个准则,必需知道如何计算系统中各环节的增益和相位延迟。要知道如何计算必需先搞清楚以下几个概念: 1.系统的传递函数:系统的传递函数定义为输出变动量除以输入变动量也叫增益。每一部份的传递函数均为该部份的输出除以输入,也叫该部份的增益。系统的增益即为各环节部份增益的乘积。增益可以用数值方式表示也可以用Db(分贝)方式表示。传递函数由幅值和相位因素组成(幅值也就是增益),并可以在博得图上分别以图形表示。通常我们要把传输函数因式分解成各因式相乘的形式,以便于得到零点各极点。2.极点:数学上,在传输函数方程中,当分母等于零时出现极点,在博得图上当增益以-1斜率开始递减时的点为一个极点。 3.零点:数学上,在传输函数方程中,当分子等于零时出现零点,在博得图上当增益以+1斜率开始递增时的点为零点,并伴随着90度的相位超前。第二种零点,即右半平面零点,增益仍以+1斜率递增,它将引起90度的相位滞后而非超前,设计时应使系统的穿越频率大大低于右半平面零点。 4.对数运算法则:两个数乘积的对数等于它们各自对数的和。所以只要将各部分增益表示为分贝后再将它们相加就可以得到系统的总增益。 5.数值与对数的相互转换计算: 例:0.5=20xlog0.5=-6Db -6Db=1/(10^(6/20))=0.5 分开来一步步的更容易理解:-6/20=-0.3, 10的-0.3次方就等于10 的0.3次方分之1,从而计算出数值。 在实际设计中我们实际是要确定431环节的3个量:(这里我们主要考虑2型误差放大器)A,431环节的放大倍数即增益;
开题报告 电气工程及自动化 倒立摆系统状态反馈控制器的设计 一、综述本课题国内外研究动态,说明选题的依据和意义 倒立摆作为一个研究控制理论的实验装置,其系统具有高阶次、不稳定、多变量、非线性和强耦合等特性,现代控制理论的研究人员将它视为典型的研究对象,这是因为倒立摆的控制过程能有效地反映控制中的许多关键问题,问题、随动问题以及跟踪问题。并且可以不断从中发掘出新的控制策略和控制方法。二十世纪九十年代以来,更加复杂多种形式的倒立摆系统成为控制理论研究领域的热点。随着摆杆上端继续再铰链另外的摆杆,控制难度将不断增大。因此,多级倒立摆的高度非线性和不确定性,使其控制稳定成为控制界公认的难题。 许多新的控制理论,都通过倒立摆实验加以验证,如模糊控制、神经网络控制、拟人控制都受到倒立摆的检验。通过对倒立摆的控制,我们能用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。因此倒立摆具有重要的理论价值。该课题的研究一直受到国内外者的广泛关注,成为控制热门研究课题之一。 在国外,对倒立摆系统稳定控制的研究始于60年代,我国则从70年代中期开始研究。对倒立摆系统的研究,主要是对两个问题进行考虑。一个是如何使倒立摆起摆;另一个是如何使倒立摆稳定摆动。目前,对这两个问题的研究非常热门。很多学者已对这两个问题提出了不同的控制方法。 倒立摆起摆就是倒立摆系统从一个平衡状态转移到另一个平衡状态。在这个过程中既要起摆快速,又不能有过大的超调。倒立摆起始摆动有许多控制方法,其中最主要的是能量控制、最优控制、智能控制。目前有已有几种方法成功实现倒立摆的起摆控制,这些方法都是基于非线性理论的控制方法。 倒立摆稳定控制的研究也一样热门,且也有一定的成果。国内外专家学者根据经典控制理论与现代控制理论应用极点配置法,设计模拟控制器,先后解决了单级倒立摆与二级倒立摆的稳定控制问题。随着计算机的广泛应用,又陆续实现了数控二级倒立摆的稳定控制。目前对四级倒立摆的控制的研究也已经开始研究并取得了一定的成就。 用不同的控制方法控制不同类型的倒立摆,已经成为了最具有挑战性的课题
实验 6 极点配置与全维状态观测器的设计 一、实验目的 1. 加深对状态反馈作用的理解。 2. 学习和掌握状态观测器的设计方法。 二、实验原理 在MATLAB 中,可以使用acker 和place 函数来进行极点配置,函数的使用方法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。 K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。 [K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。 三、实验内容 1.已知系统 (1)判断系统稳定性,说明原因。 (2)若不稳定,进行极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。 (3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进行极点配置? (4)使用状态反馈进行零极点配置的前提条件是什么? 1. (1) (2) 代码: a=[-2 -1 1;1 0 1;-1 0 1]; b=[1,1,1]'; p=[-1,-2,-3]'; K=acker(a,b,p) K = -1 2 4 (3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进行极点配置?
在经典控制理论中,一般只考虑由系统的输出变量来构成反馈律,即输出反馈。在现代控制理论的状态空间分析方法中,多考虑采用状态变量来构成反馈律,即状态反馈。从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。状态反馈可以提供更多的补偿信息,只要状态进行简单的计算再反馈,就可以获得优良的控制性能。 (4)使用状态反馈配置极点的前提是系统的状态是完全可控的。 2.已知系统 设计全维状态观测器,使观测器的极点配置在12+j,12-j 。 (1)给出原系统的状态曲线。 (2)给出观测器的状态曲线并加以对比。(观测器的初始状态可以任意选取)观察实验结果,思考以下问题: (1)说明反馈控制闭环期望极点和观测器极点的选取原则。 (2)说明观测器的引入对系统性能的影响。 (1)A=[0 1;-3 -4]; B=[0;1]; C=[2 0]; D=[]; G=ss(A,B,C,D); x=0:0.001:5; U=0*(x<0)+1*(x>0)+1*(x==0); X0=[0 1]'; T=0:0.001:5; lsim(G,U,T,X0);
河南工业大学《现代控制理论》实验报告 专业: 自动化 班级: F1203 姓名: 蔡申申 学号:201223910625完成日期:2015年1月9日 成绩评定: 一、实验题目: 状态反馈控制器设计 二、实验目的 1. 掌握状态反馈和输出反馈的概念及性质。 2. 掌握利用状态反馈进行极点配置的方法。学会用MATLAB 求解状态反馈矩阵。 3. 掌握状态观测器的设计方法。学会用MATLAB 设计状态观测器。 三、实验过程及结果 1. 已知系统 u x x ??????????+??????????--=111100020003. []x y 3333 .02667.04.0= (1)求解系统的零点、极点和传递函数,并判断系统的能控性和能观测性。 A=[-3 0 0;0 2 0;0 0 -1];B=[1;1;1];C=[0.4 0.266 0.3333]; [z p k]=ss2zp(A,B,C,0) 系统的零极点: z = 1.0017 -1.9997 p = -3 -1 2 k = 0.9993
[num den]=ss2tf(A,B,C,0) num = 0 0.9993 0.9973 -2.0018 den = 1 2 -5 -6 系统的传递函数: G1=tf(num,den) G1 = 0.9993 s^2 + 0.9973 s - 2.002 ----------------------------- s^3 + 2 s^2 - 5 s - 6 Continuous-time transfer function. Uc=ctrb(A,B); rank(Uc) ans = 3 满秩,系统是能控的。 Vo=obsv(A,C); rank(Vo) ans = 3 满秩,系统是能观的。 (2)分别选取K=[0 3 0],K=[1 3 2],K=[0 16 /3 –1/3](实验中只选取其中一个K为例)为状态反馈矩阵,求解闭环系统的零点、极点和传递函数,判断闭环系统的能控性和能观测性。它们是否发生改变?为什么? A=[-3 0 0;0 2 0;0 0 -1];B=[1;1;1];C=[0.4 0.266 0.3333];K=[0 3 0]; [z p k]=ss2zp(A-B*K,B,C,0) z = 1.0017 -1.9997 p = -3 -1 -1 k = 0.9993 [num den]=ss2tf(A-B*K,B,C,0);G2=tf(num,den) G2 =
单级倒立摆系统的极点配置与状态观测器设计 14122156 杨郁佳 (1)倒立摆的运动方程并将其线性化 选取小车的位移z ,及其速度z g 、摆的角位置θ及其角速度θg 作为状态变量,即T x z z θθ??=??? ?g g 则系统的状态空间模型为 01000100000010()1000mg M M x u M m g Ml Ml x ????????????-????=+????????+-????????????g []1000y x = 设M=2kg ,m=0.2kg ,g=9.81m/2 s ,则单级倒立摆系统的状态方程为 (1010) 01010 01020.500013030 011040.54x x x x u x x x x ??????????????????-????????=+????????????????-???????????? []12100034x x y x x ???? ??=?????? (2)状态反馈系统的极点配置。 首先,使用MATLAB ,判断系统的能控性矩阵是否为满秩。 MATLAB 程序如下:
A=[0 1 0 0; 0 0 -1 0; 0 0 0 1; 0 0 11 0]; B=[0; 0.5; 0; -0.5]; C=[1 0 0 0]; D=0; rct=rank(ctrb(A,B)) [z,p,k]=ss2zp(A,B,C,D) MATLAB程序执行结果如下: 系统能控,系统的极点为 1=0 λ 2=0 λ 3=3.3166 λ 4=-3.3166 λ 可以通过状态反馈来任意配置极点,将极点配置在 1=-3 λ* 2=-4 λ* 3=-5 λ* 4=-6 λ*
VF 变换器设计 姓 名 学 号 院、系、部 班 号 完成时间 ※ ※※※※※※※ ※ ※ ※ ※※ ※ ※ ※※※※※ ※※※※ 2013级 模拟电子技术课程设计
摘 要 电压/频率变换器的输入信号频率 f 。0 与输入电压 V i 的大小成正比,输入控制电压 V i 常为直流电压,也可根据要求选用脉冲信号做为控制电压,其输出信号可为正弦波或者脉冲波形电压。 本次课程设计利用输入电压的大小改变电容的充电速度,从而改变振荡电路的振荡频率,故采用积分器作为输入电路。积分器的输出信号去控制电压比较器或者单稳态触发器,可得到矩形脉冲输出,由输出信号电平通过一定反馈方式控制积分电容恒流放电,当电容放电到某一域值时,电容C 再次充电。由此实现V i 控制电容充放电速度,即控制输出脉冲频率。 关键词:电压变换器 积分器 单稳态触发器
目录 第1章设计任务与要求 (1) 第2章方案与论证 (1) 2.1 VF变换器设计思路 (1) 2.2 原理框图设计 (1) 第3章单元电路设计与参数计算 (2) 3.1 积分器设计 (2) 3.2 单稳态触发器设计 (3) 3.3 电子开关设计 (3) 3.4 恒流源电路设计 (4) 3.5 元件参数计算 (4) 3.6 主要元件参数 (5) 第4章仿真与调试 (6) 4.1 仿真电路 (6) 4.2 电路调试 (6) 4.3 调试结果 (7) 第5章结论与心得 (10) 5.1 结论 (10) 5.2 心得体会 (10) 参考文献 (10)
第1章 设计任务与要求 (1)设计一个振荡频率随外加控制电压变化的压控振荡器。 (2)输入外加控制电压信号为直流电压,输出信号频率为0f ,0f 与输入电压幅 度成正比。 (3)输入信号为矩形脉冲信号。 (4)输入电压的变化范围为0-10V 。 (5)0f 的变化范围为0-10kHz 。 (6)转换精度小于1%。 第2章 方案与论证 2.1 VF 变换器设计思路 (1)利用输入电压的大小改变电容器的充电速度,从而改变振荡器的振荡频率,可采用积分电路作为输入电路。积分器可由集成运算放大器和RC 元件组成。 (2)积分器的输出信号控制电压比较器、施密特触发器、单稳态触发器等,可得到矩形脉冲输出。 (3)输出信号电压通过一定反馈方式控制积分电容恒流放电,从而使积分电容的充放电速度控制了输出脉冲信号的频率,实现V/F 变换。 2.2 原理框图设计 图2-1 原理结构图输入 积分器 单稳态转换器 输出 恒流源 电子开关
实验七 状态反馈与状态观测器 一、实验目的 1. 掌握用状态反馈进行极点配置的方法。 2. 了解带有状态观测器的状态反馈系统。 二、实验原理 1. 闭环系统的动态性能与系统的特征根密切相关,在状态空间的分析中可利用状态反馈来配置系统的闭环极点。这种校正手段能提供更多的校正信息,在形成最优控制率、抑制或消除扰动影响、实现系统解耦等方面获得广泛应用。在改善与提高系统性能时不增加系统零、极点,所以不改变系统阶数,实现方便。 2. 已知线形定常系统的状态方程为 x Ax Bu y cx =+=为了实现状态反馈,需要状态变 量的测量值,而在工程中,并不是状态变量都能测量到,而一般只有输出可测,因此希望利用系统的输入输出量构成对系统状态变量的估计。解决的方法是用计算机构成一个与实际系统具有同样动态方程的模拟系统,用模拟系统的状态向量 ?()x t 作为系统状态向量()x t 的估值。状态观测器的状态和原系统的状态之间存在着误差,而引起误差的原因之一是无法使状态观测器的初态等于原系统的初态。 引进输出误差?()()y t y t -的反馈是为了使状态估计误差尽可能快地衰减到零。状态估计的误差方程为 误差衰减速度,取决于矩阵(A-HC )的特征值。 3. 若系统是可控可观的,则可按极点配置的需要选择反馈增益阵k ,然后按观测器的动态要求选择H ,H 的选择并不影响配置好的闭环传递函数的极点。因此系统的极点配置和观测器的设计可分开进行,这个原理称为分离定理。 三、实验内容 1. 设控制系统如6.1图所示,要求设计状态反馈阵K ,使动态性能指标满足超调量%5%σ≤,峰值时间0.5p t s ≤。
直流稳压电源设计报告 摘要 本作品采用了boost拓扑,利用电感、场效应管和二极管完成了升压的功能,利用Tl494,和IR2110进行反馈控制。并加上前期的整流滤波电路,实现可以用从市电开始转换。本作品基本实现了题目的功能,实现了30V到36V,2A的输出。 一、方案比较论证 1.主拓扑方案的论证 方案一:采用反激式变换器。反激式变换器适合小功率的输 出,输入电压大范围波动时,仍可以有较稳定的输出,并且 可以实现带隔离的DC/DC变换,但其中的反激式变压器设计 比较复杂,且整体效率较低。 方案二:采用boost变换器,boost是一种斩波升压变换器, 该拓扑效率高,电路结构简单,参数设计也比较容易。 方案三:采用SPICE变换器,开关环路的对称性使其可以达 到较高效率,电感的适当耦合也可以尽量减小纹波。但该方 案成本较高,对电容电感值要求较高,检测和控制电路较为 复杂。 为节约成本,并从简单考虑,本作品选用方案二。 2.控制反馈方案的选择 方案一:系统由Boost模块实现升压任务,各模块所需PWM 信号的由单片机提供,单片机AD采集实时输出量,经运算
后通过改变占空比调整模块工作状态。该方案电路最简单, 各种控制灵活,缺点有单片机运算量过大,开关信号占空比 受单片机限制,浮点运算的时延影响电路跟随,另外单片机 容易受到功率管开关干扰而失灵。 方案二:使用振荡器、比较器产生PWM波,由负反馈电路 实现输出控制,单片机负责状态切换和测量显示,该方案原 理易于理解,但自己装调的PWM电路在开关时容易出现振 铃毛刺,直接影响了系统效率,并且要完善反馈控制对回馈 信号要求较高。 方案三:借用现有成熟PWM控制器,该类集成电路输出波 形好,工作稳定,都具备至少一个反馈控制引脚,按照厂商 提供的典型电路就可装调出应用电路。但这类电路一般针对 专用场合设计,借用时需要较多设计计算,特别是该类芯片 的反馈有极高的控制灵敏度,在单片机参与时需要较多改动。 本作品采用方案三。 二、理论分析和计算 1.电路设计与分析 (1)提高效率的方法
v .. . .. 自动控制原理 实验报告 院系名称:仪器科学与光电工程学院 班级:141715班 姓名:武洋
学号:14171073 实验六状态反馈与状态观测器 一、实验目的 1.掌握用状态反馈进行极点配置的方法。 2.了解带有状态观测器的状态反馈系统。 3.理解系统极点、观测器极点与系统性能、状态估计误差之间的关系。 二、实验内容 1.系统G(s)=如图 2.6.1所示,要求设计状态反 馈阵K,使动态性能指标满足超调量% 5 %≤ σ,峰值时间s t p 5.0 ≤ 。 图2.6.1二阶系统结构图 2.被控对象传递函数为 57 . 103 945 .3 100 ) ( 2+ + = S S s G 写成状态方程形式为 CX Y Bu AX X = + = 式中 ? ? ? ? ? ? - - = 945 .3 57 . 103 1 A ; ? ? ? ? ? ? = 1 B ; []0 100 = C
为其配置系统极点为; 观测器极点为。 分别计算状态反馈增益阵和观测矩阵,并进行实验验证。 分别改变几组系统极点和观测器极点,各自比较系统阶跃响应差异。 被控对象的模拟电路图如图2.6.2所示。 图2.6.2 模拟电路图 带有状态观测器的状态反馈系统方框图如图2.6.3所示 图2.6.3 计算机实现带有状态观测器的状态反馈系统图 图2.6.3中虚线内表示连续域转换成离散域在计算机中的实现方法: 其中 AT e G = B dt t H T ??? ??=?0)(?At e t =)(? 21?---K 维状态反馈系数矩阵,由计算机算出。 12?---L 维观测器的反馈矩阵,由计算机算出。 ---Kr 为使)(t y 跟踪)(t r 所乘的比例系数。 三、 实验原理 1. 闭环系统的动态性能与系统的特征根密切相关,在状态空间的分析中可 利用状态反馈来配置系统的闭环极点。这种校正手段能提供更多的校正信息,在形成最优控制率、抑制或消除扰动影响、实现系统解耦等方面获得广泛应用。在改善与提高系统性能时不增加系统零、极点,所以不改变系统阶数,实现方便。
Chapter5 状态反馈控制器设计 控制方式有“开环控制”、“闭环控制”。“开环控制”就是把一个确定的信号(时间的函数)加到系统输入端,使系统具有某种期望的性能。然而,由于建模中的不确定性或误差、系统运行过程中的扰动等因素使系统产生一些意想不到的情况,这就要求对这些偏差进行及时修正,这就是“反馈控制”。在经典控制理论中,我们依据描述控制对象输入输出行为的传递函数模型来设计控制器,因此只能用系统输出作为反馈信号,而在现代控制理论中,则主要通过更为广泛的状态反馈对系统进行综合。 通过状态反馈来改变和控制系统的极点位置可使闭环系统具有所期望的动态特性。利用状态反馈构成的调节器,可以实现各种目的,使闭环系统满足设计要求。参见138P 例5.3.3,通过状态反馈的极点配置,使闭环系统的超调量%5≤p σ,峰值时间(超调时间)s t p 5.0≤,阻尼振荡频率10≤d ω。 5.1 线性反馈控制系统的结构与性质 设系统),,(C B A S =为 Bu Ax x += Cx y = (5-1) 图5-1 经典控制-输出反馈闭环系统 经典控制中采用输出(和输出导数)反馈(图5-1): v Fy u +-= F 为标量,v 为参考输入 (5-2) Bv x BFC A v Fy B Ax Bu Ax x +-=+-+=+=)()( 可见,在经典控制中,通过适当选择F ,可以利用输出反馈改善系统的动态性能。 现代控制中采用状态反馈(图5-1): v Kx u +-=,n m K ?~ (K 的行=u 的行,K 的列=x 的行)称为状态反馈增益矩阵。 状态反馈后的闭环系统),,(C B A S K K =的状态空间表达式为 Bv x A Bv x BK A x K +=+-=)( Cx y = (5-3) 式中: BK A A K -≡ (5-4)
第7章线性定常离散时间状态空间设计法 7.1引言 7.2状态反馈配置极点 7.3状态估值和状态观测器 7.4利用状态估值构成状态反馈以配置极点 7.5扰动调节 7.6无差调节
7.1 引言 一个被控对象: (1)()()()() ():1,():1,:,:,:x k Fx k Gu k y k Cx k x k n u k m F n n G n m C r n +=+?? =?????? 7.1 当设计控制器对其控制时,需要考虑如下各因素: ● 扰动,比如负载扰动 ● 测量噪声 ● 给定输入的指令信号 ● 输出 如图7.1所示。 给d L (k )扰动 图7.1 控制系统示意图 根据工程背景的不同,控制问题可分为调节问题和跟踪问题,跟踪问题也称为伺服问题。 调节问题的设计目标是使输出迅速而平稳地运行于某一平衡状态。包括指令变化时的动态过程,和负载扰动下的动态过程。但是这二者往往是矛盾的,需要折衷考虑。 伺服问题的设计目标是对指令信号的快速动态跟踪。 本章研究基于离散时间状态空间模型的设计方法。 7.2研究通过状态变量的反馈对闭环系统的全部特征值任意配置——稳定性与快速线。 7.3考虑当被控对象模型的状态无法直接测量时,如何使用状态观测器对状态进行重构。 7.4讨论使用重构状态进行状态反馈时闭环系统的特征值。 7.5简单地讨论扰动调节问题。 7.6状态空间设计时的无差调节问题。
7.2 状态反馈配置极点 工程被控对象如式7.1,考虑状态反馈 ()()()u k v k Lx k =+ 7.2 如图7.2所示。式7.2带入式7.1,得 (1)()()()() ()()()x k Fx k Gu k y k Cx k u k v k Lx k +=+?? =??=+? 7.3 整理得 ()(1)()() ()()x k F GL x k Gv k y k Cx k +=++?? =? 7.4 (k ) v (k ) 图7.2 状态反馈任意配置闭环系统的极点 闭环系统的特征方程为 []det ()0zI F GL -+= 7.5 问题是在什么情况下式7.5的特征根是可以任意配置的?即任给工程上期望的n 个特征根λ1, λ2, ..., λn ,有 []1det ()()0n i i zI F GL z λ=-+=-=∏ 7.6 定理:状态反馈配置极点
控制工程学院课程实验报告: 现代控制理论课程实验报告 实验题目:状态反馈控制系统的设计与实现 班级自动化(工控)姓名曾晓波学号2009021178 日期2013-1-6 一、实验目的及内容 实验目的: (1 )掌握极点配置定理及状态反馈控制系统的设计方法; (2 )比较输出反馈与状态反馈的优缺点; (3 )训练程序设计能力。 实验内容: (1 )针对一个二阶系统,分别设计输出反馈和状态反馈控制器;(2 )分别测出两种情况下系统的阶跃响应; (3 )对实验结果进行对比分析。 二、实验设备 装有的机一台 三、实验原理 一个控制系统的性能是否满足要求,要通过解的特征来评价,也就是说当传递函数是有理函数时,它的全部信息几乎都集中表现为它的极点、零点及传递函数。因此若被控系统完全能控,则可以通过状态反馈任意配置极点,使被控系统达到期望的时域性能指标。
闭环系统性能与闭环极点(特征值)密切相关,在状态空间的分析和综合中,除了利用输出反馈以外,主要利用状态反馈来配置极点,它能提供更多的校正信息。 (一) 利用状态反馈任意配置闭环极点的充要条件是:受控系统可控。 设( )受控系统的动态方程为 状态向量x 通过状态反馈矩阵k ,负反馈至系统参考输入v ,于是有 这样便构成了状态反馈系统,其结构图如图1-1所示 图1-1 状态反馈系统结构图 状态反馈系统动态方程为 闭环系统特征多项式为 ()()f I A bk λλ=-+ (1-2) 设闭环系统的期望极点为1λ,2λ,…,n λ,则系统的期望特征多项式 x b v u 1 s C A k - y x &
为 )())(()(21*n f λλλλλλλ---=Λ (1-3) 欲使闭环系统的极点取期望值,只需令式(1-2)和式(1-3)相等,即 )()(* λλf f = (1-4) 利用式(1-4)左右两边对应λ的同次项系数相等,可以求出状态反馈矩阵 []n k k k Λ 2 1 =k (二) 对线性定常连续系统∑(),若取系统的输出变量来构成反馈,则所得到的闭环控制系统称为输出反馈控制系统。输出反馈控制系统的结构图如图所示。 开环系统状态空间模型和输出反馈律分别为 H 为r *m 维的实矩阵,称为输出反馈矩阵。 则可得如下输出反馈闭环控制系统的状态空间模型: 输出反馈闭环系统可简记为H(),其传递函数阵为: (s)()-1B B ? A C H y - x u v + + + x ' 开环系统 A B C H '=+?? =?=-+x x u y x u y v ()A BHC B C '=-+??=? x x v y x
一. 极点配置原理 假设原系统的状态空间模型为: ???=+=Cx y Bu Ax x 若系统是完全可控的,则可引入状态反馈调节器,且: 这时,闭环系统的状态空间模型为: ()x A BK x Bv y Cx =-+?? =? 二. 状态观测器设计原理 假设原系统的状态空间模型为: ???=+=Cx y Bu Ax x 若系统是完全可观的,则可引入全维状态观测器,且: ??(y y)??x Ax Bu G y Cx ?=++-??=?? 设?x x x =-,闭环系统的状态空间模型为: ()x A GC x =- 解得: (A GC)t (0),t 0x e x -=≥ 由上式可以看出,在t 0≥所有时间内,如果(0)x =0,即状态估计值x 与x 相等。如果(0)0x ≠,两者初值不相等,但是()A GC -的所有特征值具有负实部,这样 x 就能渐进衰减至零,观测器的状态向量?x 就能够渐进地逼近实际状态向量x 。状态逼近的速度取决于G 的选择和A GC -的特征配置。 三. 状态观测的实现 为什么要输出y 和输入u 对系统状态x 进行重构。 u Kx v =-+
证明 输出方程对t 逐次求导,并将状态方程x Ax Bu =+代入整理,得 2(n 1)(n 2)(n 3)21n n y Cx y CBu CAx y CBu CABu CA x y CBu CABu CA Bu CA x -----=??-=??--=????----=? 将等号左边分别用z 的各分量12,, ,n z z z 表示,有 121(n 1)(n 2)(n 3) 2 n n n y C z y CBu CA z z y CBu CABu x Qx z CA y CBu CABu CA Bu -----?? ???????? -?? ????? ? ? ?????==--==?? ????????????????????----?? ? 如果系统完全能观,则 rankQ n = 即 1?(Q Q)T T x Q z -= (类似于最小二乘参数估计) 综上所述,构造一个新系统z ,它是以原系统的输出y 和输入u ,其输出经过变 换1(Q Q)T T Q -后得到状态向量?x 。也就是说系统完全能观,状态就能被系统的输入输出以及各阶倒数估计出来。 四. 实例 给定受控系统为 再指定期望的闭环极点为12,341,1,2i λλλ*** =-=-±=-,观测器的特征值为 12,33,32i λλ=-=-±,试设计一个观测器和一个状态反馈控制系统,并画出系统 的组成结构图。 []0100000101000100 05 021000x x u y x ???? ????-????=+????????-???? =
实验二十八 利用状态观测器实现状态反馈的系统设计 【实验地点】 【实验目的】 1、掌握用状态反馈进行极点配置的方法。 2、了解带有状态观测器的状态反馈系统。 3、练习控制性能比较与评估的方法。 【实验设备与软件】 1、MA TLAB 软件。 2、labACT 实验箱。 【实验原理】 1、闭环系统的动态性能与系统的特征根密切相关,在状态空间的分析中可利用状态反馈来配置系统的闭环极点。这种校正手段能提供更多的校正信息,在形成最优控制率、抑制或消除扰动影响、实现系统解耦等方面获得广泛应用。 2、为了实现状态反馈,需要状态变量的测量值,而在工程中,并不是状态变量都能测量到,而一般只有输出可测,因此希望利用系统的输入输出量构成对系统状态变量的估计。解决的方法是用计算机构成一个与实际系统具有同样动态方程的模拟系统,用模拟系统的状态向量 作为系统状态向量 的估值。 状态观测器的状态和原系统的状态之间存在着误差,而引起误差的原因之一是无法使状态观测器的初态等于原系统的初态。引进输出误差 的反馈是为了使状态估计误差尽可能快地衰减到零。 3、若系统是可控可观的,则可按极点配置的需要选择反馈增益阵k ,然后按观测器的动态要求选择H ,H 的选择并不影响配置好的闭环传递函数的极点。因此系统的极点配置和观测器的设计可分开进行,这个原理称为分离定理。 【实验内容、方法、过程与分析】 1、实验内容 设控制系统如图1所示,要求设计状态反馈阵K ,使动态性能指标满足超调量%5%≤σ,峰值时间s t p 5.0≤。 图 1 由图可得系统传递函数关系为: 21()()0.051 X s X s s =+ (1) 12()()()U s X s X s s -= (2) 1()()X s Y s = (3) 对上(1),(2),(3)化简并反变换:
实验报告 实验名称系统稳定性分析、利用MATLAB实现极点配置、设计状态观测器系专业班 姓名学号授课老师 预定时间实验时间实验台号 一、目的要求 掌握系统稳定性的概念。学会使用MATLAB确定线性定常系统和非线性定常系统的稳定性。 掌握状态反馈和输出反馈的概念及性质。 掌握利用状态反馈进行极点配置的方法。学会用MATLAB求解状态反馈矩阵。 掌握状态观测器的设计方法。学会用MATLAB设计状态观测器。 熟悉分离定理,学会设计带有状态观测器的状态反馈系统。 二、原理简述 函数eig()的调用格式为V=eig(A)返回方阵A的特征值。 函数roots()的调用格式为roots(den),其中den为多项式的系数行向量。计算多项式方程的解。 函数pole()的调用格式为pole(G),其中G为系统的LTI对象。计算系统传递函数的极点。 函数zpkdata()的调用格式为[z,p,k]=zpkdata(G,’v’),其中G为系统LTI对象。返回系统的零点、极点和增益。 函数pzmap()的调用格式为pzmap(G),其中G为LTI对象。绘制系统的零点和极点。 对于线性定常连续系统x Ax,若A是非奇异矩阵,则原点是其唯一的平衡状态。统在原点处大范围渐近稳定的充分条件是:存在李氏函数v(x)x T px,且v(x)正定,v(x)负定。 如果SISO线性定常系统完全能控,则可通过适当的状态反馈,将闭环系统极点配置到 任意期望的位置。 MATLAB提供的函数acker()是用Ackermann公式求解状态反馈阵K。 MATLAB提供的函数place()也可求出状态反馈阵K。 如果线性定常系统完全能观测,则可构造全维(基本)观测器。全维(基本) 状态观测器的状态方程为观测器的反馈矩阵L为 其中为系统的能观测矩阵。 其中为期望的状态观测器的极点。观测器设计是极点配置的对偶问题,故可利用函数acker()和place()进行求解。
状态反馈器和状态观测器的设计 一、实验设备 PC 计算机,MATLAB 软件,控制理论实验台,示波器 二、实验目的 (1)学习闭环系统极点配置定理及算法,学习全维状态观测器设计 法; (2)掌握用极点配置的方法 (3)掌握状态观测器设计方法 (4)学会使用MATLAB工具进行初步的控制系统设计 三、实验原理及相关知识 (1)设系统的模型如式所示
若系统可控,则必可用状态反馈的方法进行极点配置来改变系统性能。 引入状态反馈后系统模型如下式所示: (2)所给系统可观,则系统存在状态观测器 四、实验内容 (1)某系统状态方程如下 1010 0134326x x u ?????????=+????????----???? []100y x =
理想闭环系统的极点为[]123---. (1)采用 Ackermann 公式计算法进行闭环系统极点配置; 代码: A=[0 1 0;0 0 1;-4 -3 -2]; B=[1; 3; -6]; P=[-1 -2 -3]; K=acker(A,B,P) Ac=A-B*K eig(Ac) (2)采用调用 place 函数法进行闭环系统极点配置; 代码: A=[0 1 0;0 0 1;-4 -3 -2]; B=[1;3;-6]; eig(A)' P=[-1 -2 -3]; K=place(A,B,P) eig(A-B*K)'
(3)设计全维状态观测器,要求状态观测器的极点为[] 123--- 代码: a=[0 1 0;0 0 1;-4 -3 -2]; b=[1;3;-6]; c=[1 0 0]; p=[-1 -2 -3]; a1=a'; b1=c'; c1=b'; K=acker(a1,b1,p); h=(K)' ahc=a-h*c
本科实验报告 课程名称: 现代控制理论 实验项目: 状态反馈与状态观测器的设计 实验地点: 中区机房 专业班级:自动化学号: 学生姓名: 指导教师: 年月日 现代控制理论基础 一、实验目的 (1)熟悉与掌握极点配置的原理。 (2)熟悉与掌握观测器设计的原理。 (3)通过实验验证理论的正确性。 (4)分析仿真结果与理论计算的结果。 二、实验要求 (1)根据所给被控系统与性能指标要求设计状态反馈阵K。 (2)根据所给被控系统与性能指标要求设计状态观测器阵L。 (3)在计算机上进行分布仿真。 (4)如果结果不能满足要求,分析原因并重复上述步骤。 三、实验内容
(一)、状态反馈 状态反馈就是将系统的状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入叠加形成控制作为受控系统的控制输入,采用状态反馈不但可以实现闭环系统的极点任意配置,而且也就是实现解耦与构成线性最优调节器的主要手段。 1、全部极点配置 给定控制系统的状态空间模型,则经常希望引入某种控制器,使得该系统的闭环极点移动到某个指定位置,因为在很多情况下系统的极点位置会决定系统的动态性能。 假设系统的状态空间表达式为 (1) 其中n ?:: ; ? ; : : A? m n C r n B n 引入状态反馈,使进入该系统的信号为 u- =(2) r Kx 式中r为系统的外部参考输入,K为n n?矩阵、 可得状态反馈闭环系统的状态空间表达式为 (3) 可以证明,若给定系统就是完全能控的,则可以通过状态反馈实现系统的闭环极点进行任意配置。 假定单变量系统的n个希望极点为λ1,λ2,…λn, 则可以求出期望的闭环特征方程为
1 总体设计思路 1.1设计目的 升压斩波电路是最基本的斩波电路之一,利用升压斩波电路可以实现对直流的升压变化。所以,升压斩波电路也可以认为是直流升压变压器,升压斩波电路的应用主要是以Boost变换器实现的。升压斩波电路的典型应用有:一、直流电动机传动,二、单相功率因数校正(Power Factor Correction PFC)电路,三、交直流电源。直流升压斩波电路的应用非常广泛,原理相对比较简单,易于实现,但是,设计一个性能较好变压范围大的Boost变换器并非易事,本设计的目的也就在于寻求一种性能较高的斩波变换方式和驱动与保护装置。 1.2实现方案 本设计主要分为五个部分:一、直流稳压电源(整流电路)设计,二、Boost 变换器主电路设计,三、控制电路设计,四、驱动电路设计,五、保护电路设计。直流稳压电源的设计相对比较简单,应用基本的整流知识,该部分并非本设计的重点,本设计的重点在于主电路的设计,主电路一般由电感、电容、电力二极管、和全控型器件IGBT组成,主电路的负载通常为直流电动机,控制电路主要是实现对IGBT的控制,从而实现直流变压。主电路是通过PWM方式来控制IGBT的通断,使用脉冲调制器SG3525来产生PWM的控制信号。设计主电路的输出电压为75V,本设计采用闭环负反馈控制系统,将输出电压反馈给控制端,由输出电压与载波信号比较产生PWM信号,达到负反馈稳定控制的目的。 图1-1 总电路原理框图
2直流稳压电源设计 2.1电源设计基本原理 在电子电路及设备中一般都需要稳定的直流电源供电。这次设计的直流电源为单相小功率电源,它将频率为50Hz、有效值为220V的单向交流电压转换为幅值稳压、输出电流为几十安以下的直流电压。其基本框图如下: 图2-1直流稳压电源基本框图 图 2-2 波形变换 2.1.1变压环节 由于直流电压源输入电压为220V电网电压,一般情况下,所需直流电压的数值远小于电网电压,因此需通过电源变压器降压后,再对小幅交流电压进行处理。变压器的电压比及副边电压有效值取决于电路设计和实际需要。 2.1.2整流环节 变压器变压器副边电压通过整流电路从交流电压转换为直流电压,即将正弦波电压转换为单一方向的脉动电压,半波整流电路和全波整流电路的输出波形如上图所画。可以看出,他们均含有较大的交流分量,会影响负载电路的正常工作;例如,交流分量将混入输入信号被放大电路放电,甚至在放大电路的输出端所混入的电源交流分量大于有用信号;因而不能直接作为电子电路的供电电源。应当指出,图中整流电路输出端所画波形是未接滤波电路时的波形,接入滤波电路后波形将有所变化。
上海电力学院实验报告自动控制原理实验课程题目:状态反馈控制器的设计 班级: 姓名: 学号: 时间: 一、问题描述已知一个单位反馈系统的开环传递函数为,试搭建simulink 模型。仿真原系统的阶跃响应。再设计状态反馈控制器,配置系统的闭环极点在,并用simulink 模型进行仿真验证。 二、理论方法分析 MATLAB提供了单变量系统极点配置函数acker (),该函数 的调用格式为K=place ( A,b,p) 其中,P为期望闭环极点的列向量,K为状态反馈矩阵。Acker ()函数时Ackerman 公式编写,若单输入系统可控的,则采用状态反馈控制后,控制量u=r+Kx 。 对于多变量系统的状态反馈极点配置,MATLAB也给出了函数place (),其调用格式为 K=place ( A,B,P) 状态反馈是将系统的状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入叠加形成控制量,作为受控系统的输入,实现闭环系统极点的任意配置,而且也是实现解耦和构成线性最优调节器的主要手段。
只要给定的系统是完全能控且能观的,则闭环系统的极点可以通过状态反馈矩阵的确定来任意配置。这个定理是用极点配置方法设计反馈矩阵的前提和依据。在单输入,单输出系统中,反馈矩阵有唯一解,且状态反馈不改变系统的零点。 三、实验设计与实现 1、搭建原系统的sumlink模型并观察其单位阶跃响应 原系统sumlink模型
原系统单位阶跃响应 由原系统单位阶跃响应可知系统不稳定 2、用极点配置法设计状态反馈控制器 ①利用matlab计算系统的状态空间模型的标准型>> a=[10];b=[1 5 6 0];[A B C D]=tf2ss(a,b) A = -5 -6 0 1 0 0 0 1 0 B = 1 C = 0 0 10 ③系统能控性矩阵
学号: 常州大学 毕业设计(论文) (2012届) 题目 学生 学院专业班级 校内指导教师专业技术职务 校外指导老师专业技术职务 二○一二年六月
反激式变换器电路仿真建模与分析 摘要:开关DC-DC变换器是一种典型的强非线性时变动力学系统,存在各种类型的次谐波、分岔与混沌等丰富的非线性现象。这些非线性现象严重影响开关DC-DC变换器的性能。因此,深入分析和研究开关DC-DC变换器的分岔和混沌等非线性动力学现象,对开关DC-DC变换器的设计、运行及控制都具有重要的指导意义。 反激式变换器是一种隔离式开关变换器,该变换器利用变压器实现了输入与输出电气隔离。变压器具有变压的功能有利于扩大变换器的输出设备应用范围,也便于实现不同电压的多路输出或相同电压的多种输出。运用变压器进行隔离使电源与负载两个直流系统之间是绝缘的,即使输出短路也不会影响外部电源。本文利用PSIM电路仿真软件进行电路仿真,给出峰值电流控制反激式变换器和电压反馈控制反激式变换器各电路参数变化时的时域波形和在输出电压-安匝和平面上的相轨图,并对输入电压和负载电阻两个参数进行分析,从而确定其稳定工作时的参数区域。 本文对反激式变换器进行建模和PSIM电路仿真分析,了解到该变换器在不同电路参数时的运行情况,有效地估计出该变换器处于稳定工作状态时的电路参数范围,有助于制作实际反激式变换器电路参数的合理选取。 关键词:反激式变换器;安匝和;峰值电流控制;电压反馈控制;稳定性;PSIM;仿真
Simulation Modeling and Analysis of the fly back converter circuit Abstract: Switching DC-DC converters are a type of strong nonlinear and time-varying dynamical systems with all kinds of nonlinear phenomena, such as subharmonic, bifurcation, and chaos. These phenomena will seriously impact the work of the switching DC-DC converters. So, the deep analysis and study of these nonlinear dynamical phenomena have an important significance for design of switching DC-DC converter. Fly back converter is a special switching DC-DC converter, in which the transformer is employed to isolate the input from output. And the use of transformer in fly back converter is convenient to expand the output range and realize multi-output. In this paper, using the PSIM software, the simulation circuits of peak current mode(PCM) controlled fly back converter and voltage mode(VM) controlled fly back converter are built. Based on the simulation circuit and different circuit parameters, the operation of PCM controlled fly back converter is analysed and studied by time-domain waveforms and phase portraits in inductor current and total ampere-turns plane. Besides, the input voltage and load resistor are considered as two variables to depict the steady-state and unsteady-state region of the converter. The research results can help to choose reasonable circuit parameters in designing fly back converter circuit. Key works:Fly back converter; Total ampere-turns; Chaos; Peak current mode control; V oltage mode control; Stability; PSIM; Simulation