异步牵引电动机工作原理
1.牵引电机的主要运行原理
定子通上三相交流电后,在气隙中产生旋转的磁场,该磁场切割转子导条后在转子导条中产生感应电流,带电的转子导条处于气隙旋转磁场中就要产生电动力,使转子朝定子旋转磁场的同一方向旋转。由于转子导条中的电流是因转子导条切割由定子绕组产生的气隙磁场才感应产生的,所以转子的转速只能低于气隙旋转磁场的转速,永远不可能与其同步,否则转子导条与气隙磁场同步旋转,转子导条不再切割磁场产生感应电流和产生电动力了,转子也不可能旋转了,所以称按这种原理运行的电机为异步电动机。
2.牵引电机的调速原理
现在机车用异步牵引电机调速普遍采用变频变压调速技术。异步电机转速、电动势和电磁转矩公式如下:
转差率s=(n1-n)/n
转速n=60f/p(1-s)
电动势E1=4K1 f N s K dp1φ
电磁转矩T em=CφI r COS?
n1:同步转速(旋转磁场)n:转子转速;f:定子频率;s:转差率;p:电机极对数;E1:电动势;K1:波形系数;
N s:每相串联匝数;K dp1:绕组系数;φ:磁通;T em:电磁转矩;C:常数;I r:转子电流;COS?:功率因数。
改变定子频率即可改变电机转速,随着定子频率的增加,电机转速相应增加,如果电压不增加,将导致电机磁场减弱,电机转矩将降低,电机磁场降到很低时,电机不能输出足够的转矩,不能满足负载要求;另一方面,低频起动时,如果电压很高,将导致电机过分饱和。因此异步电机变频时,电压也应在一定范围内保持一定比例的变化,这种调速方式称之为变频变压调速。异步牵引电机变频调速主要采用了恒转矩变频调速(恒磁通变频调速的一个区段,磁通和电流不变)、恒磁通变频调速、恒功率变频调速等调速方式。
3. 异步电机牵引与再生制动原理:
在1>s>0的范围内,电磁转矩与转子转向相同,它拖动转子旋转,电机从逆变器吸收电能转换为机械能,克服机车阻力驱动机车运行,处于电动机运行状态。
s=1为起动运行状态(启动瞬间,转子转速n=0,s=1)。
s=0,n=n1,转子转速接近于同步转速,即空载运行。
在s<0的范围内,转子转向与定子旋转磁场一致,转子转速n大于电机同步转速n1,电磁转矩与转子转向相反,它阻碍转子旋转,电机将机车机械能转换为电能传送给逆变器,对机车产生制动转矩,电机处于发电机运行状态,称之为再生制动
外力拖动转子向着旋转磁场反方向转动,n<0,s>1,电机既从电网吸收功率,又从外界吸收机械功率,转化为热能散发。称为电磁制动。
电动机基本知识 电动机通常简称为电机,俗称马达,在电路中用字母“M”(旧标准用“D”)表示。它的作用就是将电能转换为机械能。 1、按工作电源分类 根据工作电源的不同,电动机可分为直流电动机和交流电动机。其中交流电动机根据电源相数分为单相电动机和三相电动机。直流电动机又分为无刷直流电动机和有刷直流电动机。有刷直流电动机可分为永磁直流电动机和电磁直流电动机。电磁直流电动机又分为串励直流电动机、并励直流电动机、他励直流电动机和复励直流电动机。永磁直流电动机又分为稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。 2、按结构和工作原理分类 电动机按结构及工作原理可分为同步电动机和异步电动机两种。同步电动机又分为永磁同步电动机、磁阻同步电动机和磁滞同步电动机 3 种。异步电动机又分为感应电动机和交流换向器电动机两种。感应电动机又分为单相异步电动机、三相异步电动机和罩极异步电动机3 种。交流换向器电动机又分为单相串励电动机、交直流两用电动机和推斥电动机 3 种。 3、按启动与运行方式分类 电动机按启动与运行方式可分为电容启动式电动机、电容启动运转式电动机和分相式电动机。
4、按用途分类 电动机按用途可分为驱动用电动机和控制用电动机。驱动用电动机又分为电动工具(包括钻孔、抛光、磨光、开槽、切割、扩孔等工具)用电动机、家电(包括洗衣机、电风扇、电冰箱、空调器、录音机、录像机、影碟机、复读机、吸尘器、照相机、电吹风、电动剃须刀、电动自行车、电动玩具等)用电动机、其他通用小型机械设备(包括各种小型机床、小型机械、医疗器械、电子仪器等)用电动机。控制用电动机又分为步进电动机和伺服电动机等。 5、按转子的结构分类 电动机按转子的结构可分为笼型感应电动机(早期称为鼠笼型异步电动机)和绕线转子感应电动机(早期称为绕线型异步电动机)。 6、按运转速度分类 电动机按运转速度可分为低速电动机、高速电动机、恒速电动机、调速电动机。低速电动机又分为齿轮减速电动机、电磁减速电动机、力矩电动机和爪极同步电动机等。调速电动机除可分为有极恒速电动机、无极恒速电动机、有极变速电动机和无极变速电动机外,还可分为电磁调速电动机、直流调速电动机、PWM 变频调速电动机和开关磁阻调速电动机。 7、按防护形式分类
当向三相定子绕组中通入对称的三相交流电时,就产生了一个以转速1n 沿定子和转子内圆空间作顺时针方向旋转的旋转磁场。转子导体开始时是静止的,由于旋转磁场以1n 转速旋转,故转子导体将切割定子旋转磁场而产生感应电动势(感应电动势的方向用右手定则判定)。由于转子导体两端被短路环短接,在感应电动势的作用下,转子导体中将产生与感应电动势方向一致的感生电流。转子的载流导体在定子磁场中受到电磁力的作用(力的方向用左手定则判定)。电磁力对转子轴产生电磁转矩,驱动转子沿着旋转磁场方向旋转,转速为n 。 异步电机所谓异步,是指定子旋转磁场转速1n 和转子转速n 的不同。定子旋转磁场 的转速和电网频率严格对应,我们把定子旋转磁场转速与转子转速之差除以定子旋转磁 场转速定义为转差率s。 对于异步电机来说,电机学里没有像直流电机那样利用理想空载转速和转速降来对 转速进行描述,而是借助于定子旋转磁场转速1n 和转差率s 来完成对转速的刻化 。 电动机的转子转速不会与旋转磁场同步,更不会超过旋转磁场的速度。因为三相异步电动机转子线圈中的感应电流是由于转子导体与磁场有相对运动而产生的。如果三相异步电动机转子的转速与旋转磁场的转速成大小相等,那么,磁场与转子之间就没有相对运动,导体不能切割磁力线,因之转子线圈中也就不会产生感应电势和电流,三相异步电动机转子导体在磁场中也就不会受到电磁力的作用而使转子转动。因而三相异步电动机的转子旋转速度不可能与旋转磁场相同,总是小于旋转磁场的同步转速。但在特殊运行方式下(如发电制动),三相异步电动机转子转速可以大于同步转速。 由于三相异步电动机的转子与定子旋转磁场以相同的方向、不同的转速成旋转,所以叫三相异步电动机而不叫三相同步电动机。 三相异步电动机与三相同步电动机之间区别是三相异步电动机存在转差率,而三相同步电动机没有。 同步电动机的转子是固定磁场,转速与旋转磁场同步; 三相异步电动机的转子是鼠笼形短路环(或线圈),靠切割旋转磁场的磁力线产生旋转力矩 三相异步电动机定子磁场旋转,导致转子切割磁场产生电流,为了减小电流(想像这样),转子跟着旋转,但是速度总是比定子磁场慢些,这样才保持转动
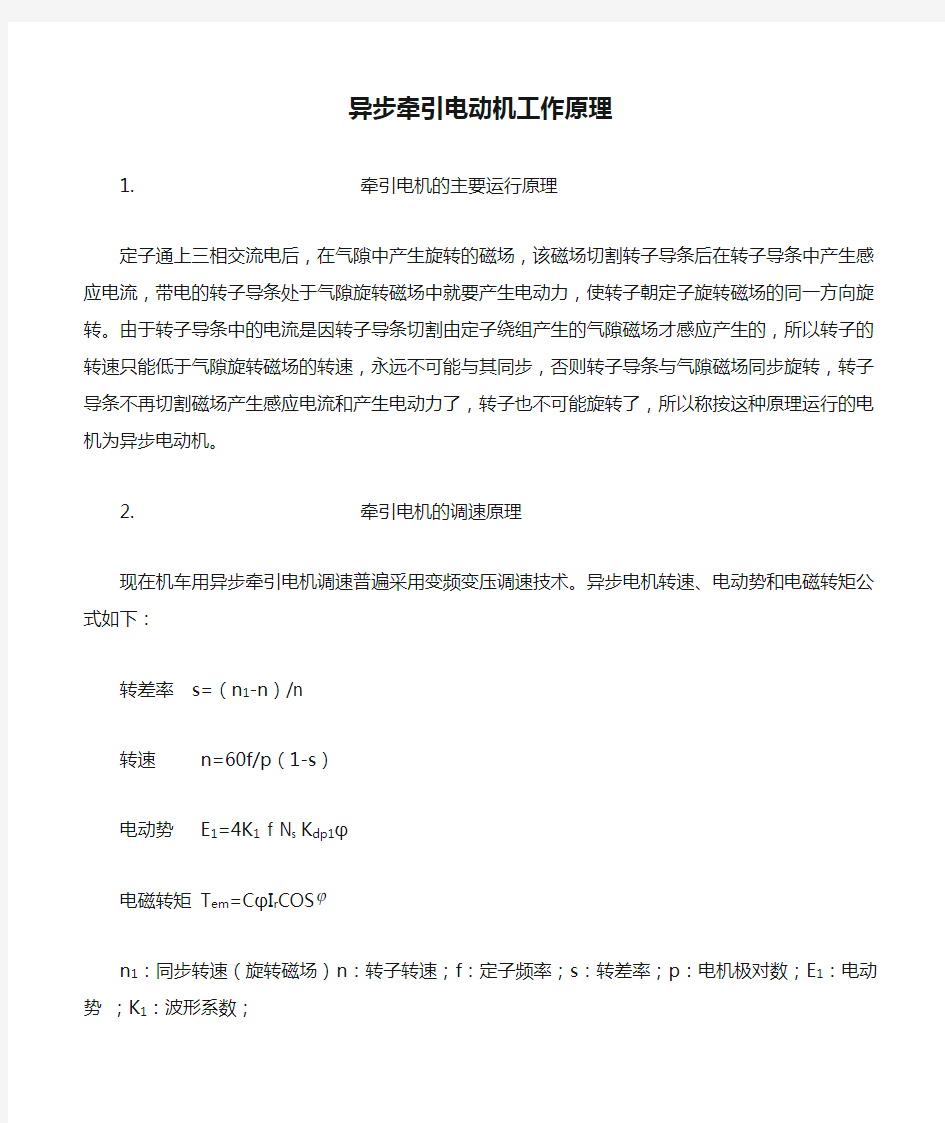
单相鼠笼式异步电动机的工作原理 单相鼠笼式异步动机由单相电源供电,它直接接到220伏单相交流电源上就能工作,但要采取一定的措施,否则启动不起来。我们日常生活用的一些家用电器,如空调器、电冰箱、洗衣机、电扇等广泛应用着单相异步电动机。 单相异步电动机的工作原理 当给三相异步电动机的定子三相绕组通入三相交流电时,会形成一个旋转磁场,在旋转磁场的作用下,转子将获得启动转矩而自行启动。当三相异步电动机通入单相交流电时就不能产生旋转磁场。 下面来分析单相异步电动机定子绕组通入单相交流电时产生的磁场情况。如下图所示为一台简单的单相异步电动机原理图,定子铁心上布置有单相定子绕组,转子为鼠笼结构。 交流电流波形
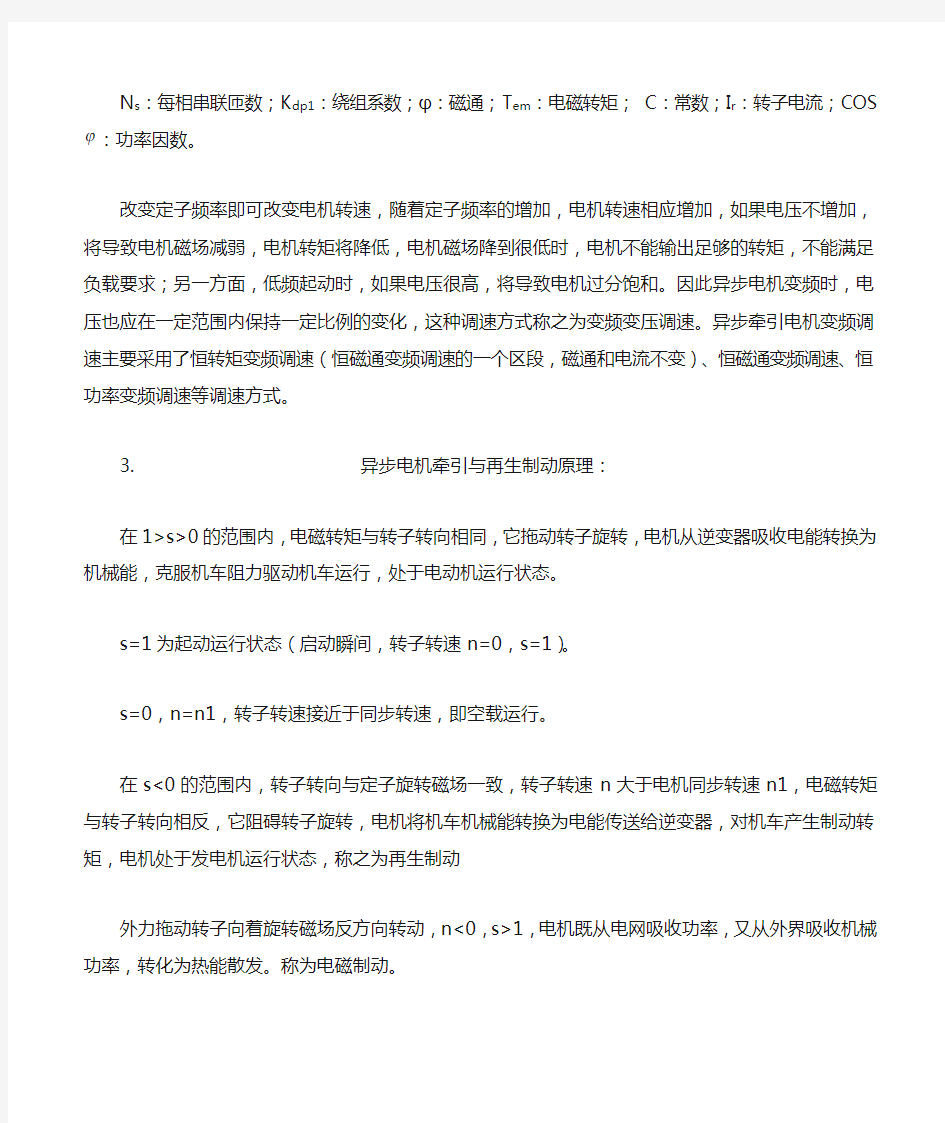
电流正半周产生的磁场 电流负半周产生的磁场 当向单相异步电动机的定子绕组入单相交流电后,由上图可见,当电流在正半周及负半周不断交变时,其产生的磁场大小及方向也在不断变化(按正弦规律变化),但磁场的轴线则沿纵轴方向固定不动,这样的磁场称为脉动磁场。 当转子静止不动时转子导体的合成感应电动势和电流为0,合成转矩为0,因此转子没有启动转矩。故单相异步电动机如果不采取一定的措施,单相异步电动机不能自行启动,如果用一个外力使转子转动一下,则转子能沿该方向继续转动下去。 单相异步电动机根据其启动方法或运行方法的不同,可分为单相电容运行电动机;单相电容启动电动机;单相罩极式电动机等。下面分别介绍。单相异步电动机容量一般较小,运行性能较差。 t 45 90 135 180 225 270 360 315
图1 单相电容运行异步电动机原理图 (a)接线图 (b)电流相量图 图1是单相电容运行异步电动机工作原理图。单相电容式异步电动机的定子铁芯上嵌放两套绕组:主绕组U1—U2(主绕组又称工作绕组)和副绕组Z1—Z2(副绕组又称启动绕组)。两套绕组在空间的位置上互差90度电角度。在启动绕Z1—Z2中串入一个电容器C后再与工作绕组并联,然后接到单相电源上。设流过启动绕组Z1-Z2的电流为iz,流过工作绕组U1—U2的电流以为iu,当接上电源后,由于电容的充放电作用,iz落后于iu90度,流过两套绕组的电流iz与iu在相位上相差90度,如图2所示。 设电动机两个绕组接上交流电源后,电流为正值时,电流从绕组的头端进去尾端出来;电流为负值时,电流从绕组的尾端进去头端出来。 从图2可看到:在t=0瞬间,iz=0,绕组Z1—Z2中无电流流过;而这瞬时iu为负的最大值,绕组U1—U2中电流由U2进Ul出。用右手定则可判断,此时电动机中会产生如图2所示磁场,其合成磁场方向向下。 从图2可看到:在ωt=π/2瞬间,iu=0,绕组U1—U2中无电流流过;这瞬间iz为正的最大值,绕组Z1-Z2中电流从Z1进Z2出。此时电动机磁场分布如图2所示,其合成磁场方向较t=0时刻顺时针方向旋转了90角度。
电动机的基本结构及工作原理 交流电机分异步电机和同步电机两大类。异步电机一般作电动机使用,拖动各种生产机械作功。同步电机分分为同步发电机和同步电动机两类。根据使用电源不同,异步电机可分为三相和单相两种型式。 一、异步电动机的基本结构 三相异步电动机由定子和转子两部分组成。因转子结构不同又可分为三相笼型和绕线式电机。 1、三相异步电动机的定子: 定子主要由定子铁心、定子绕组和机座三部分组成。定子的作用是通入三相对称交流电后产生旋转磁场以驱动转子旋转。定子铁心是电动机磁路的一部分,为减少铁心损耗,一般由0.35~0.5mm厚的导磁性能较好的硅钢片叠成圆筒形状,安装在机座内。定子绕组是电动机的电路部分,安嵌安在定子铁心的内圆槽内。定子绕组分单层和双层两种。一般小型异步电机采用单层绕组。大中型异步电动机采用双层绕组。机座是电动机的外壳和支架,用来固定和支撑定子铁心和端盖。 电机的定子绕组一般采用漆包线绕制而成,分三组分布在定子铁心槽内(每组间隔120O),构成对称的三相绕组。三相绕组有6个出线端,其首尾分别用U1、U2;V1、V2;W1、W2表示,连接在电机机壳上的接线盒中,一般3KW以下的电机采用星形接法(Y接),3KW以上的电机采用三角形接法(△接)。当通入电机定子的三相交流电相序改变后,因定子的旋转磁场方向改变,所以电机的转子旋转方向也改变。
2、三相异步电动机的转子: 转子主要由转子铁心、转子绕组和转轴三部分组成。转子的作用是产生感应电动势和感应电流,形成电磁转矩,实现机电能量的转换,从而带动负载机械转动。转子铁心和定子、气隙一起构成电动机的磁路部分。转子铁心也用硅钢片叠压而成,压装在转轴上。气隙是电动机磁路的一部分,它是决定电动机运行质量的一个重要因素。气隙过大将会使励磁电流增大,功率因数降低,电动机的性能变坏;气隙过小,则会使运行时转子铁心和定子铁心发生碰撞。一般中小型三相异步电动机的气隙为0.2~1.0mm,大型三相异步电动机的气隙为1.0~1.5mm。 三相异步电动机的转子绕组结构型式不同,可分为笼型转子和绕线转子两种。笼型转子绕组由嵌在转子铁心槽内的裸导条(铜条或铝条)组成。导条两端分别焊接在两个短接的端环上,形成一个整体。如去掉转子铁心,整个绕组的外形就像一个笼子,由此而得名。中小型电动机的笼型转子一般都采用铸铝转子,即把熔化了的铝浇铸在转子槽内而形成笼型。大型电动机采用铜导条;绕线转子绕组与定子绕组相似,由嵌放在转子铁心槽内的三相对称绕组构成,绕组作星形形联结,三个绕组的尾端连结在一起,三个首端分别接在固定在转轴上且彼此绝缘的三个铜制集电环上,通过电刷与外电路的可变电阻相连,用于起动或调速。 3、三相异步电动机的铭牌: 每台电动机上都有一块铭牌,上面标注了电动机的额定值和基本技术数据。铭牌上的额定值与有关技术数据是正确选择、使用和检修电动机的依据。下面对铭牌中和各数据加以说明: 型号异步电动机的型号主要包括产品代号、设计序号、规格代号和特
第五章异步电动机 前言:①定义:异步电机(也叫感应电机)是一种交流旋转电机,它的转速除与电网频率有关外,还随负载而变。 ②应用:主要作电动机使用,如:机床;水泵;家用电器; ③它的功率因数永远是滞后的。 5.1异步电动机的结构和工作原理 一、异步电动机的主要用途和分类1、异步电机主要用作电动机,去拖动各种生产机械。 异步电动机的优点:结构简单、容易制造、价格低廉、运行可靠、坚固耐用、运行效率较高和具有适用的工作特征。 异步电动机的缺点:功率因数较差。异步电动机运行时,必须从电网里吸收落后性的无功功率,它的功率因数总是小于1。 2、异步电动机的种类很多,从不同角度看,有不同的分类法: (1)按定子相数分有 ①单相异步电动机; ②两相异步电动机; ③三相异步电动机。 (2)按转子结构分有 ①绕线式异步电动机; ②鼠笼式异步电动机。 又包括单鼠笼异步电动机、双鼠笼异步电动机和深槽式异步电动机。 此外,根据电机定子绕组上所加电压的大小,又有高压异步电动机、低压异步电动机之分。从其它角度看,还有高起动转矩异步电机、高转差率异步电机、高转速异步电机等等。 二、异步电动机的结构
1. 定子:定子铁心:0.5mm厚硅钢片叠压而成,磁路的一部分 定子绕组:电磁线制而成,电路一部分 机座:铸铁或钢板焊接而成 (1)定子铁心是电动机磁路的一部分,装在机座里。为了降低定子铁心里的铁损耗,定子铁心用用0.5mm厚的硅钢片叠压而成的,在硅钢片的两面还应途上绝缘漆。下图所示为定子槽,其中(a)是开口槽,用于大、中型容量的高压异步电动机中;(b)是半开口槽,用于中型500V以下的异步电动机中;(c)是半闭口槽,用于低压小型异步电动机中。 (2)定子绕组:高压大、中型容量的异步电动机定子绕组常采用Y 接,只有三根引出线,如图(a)所示。对中、小容量低压异步电动机,通常把定子三相绕组的六根出线头都引出来,根据需要可接成Y形或△形,如图(b)所示。定子绕组用绝缘的铜(或铝)导线绕成,嵌在定子槽内。
定子叠频法在异步牵引电机型式试验中的应用参考 文本 In The Actual Work Production Management, In Order To Ensure The Smooth Progress Of The Process, And Consider The Relationship Between Each Link, The Specific Requirements Of Each Link To Achieve Risk Control And Planning 某某管理中心 XX年XX月
定子叠频法在异步牵引电机型式试验中 的应用参考文本 使用指引:此安全管理资料应用在实际工作生产管理中为了保障过程顺利推进,同时考虑各个环节之间的关系,每个环节实现的具体要求而进行的风险控制与规划,并将危害降低到最小,文档经过下载可进行自定义修改,请根据实际需求进行调整与使用。 采用定子叠频法进行异步牵引电机热试验,介绍了定 子叠频法的基本工作原理,研究了合成磁场与主副电源参 数之间的函数关系,明确了采用定子叠频法进行电机加热 的调节规律并阐述了具体的试验调试方法,较好地解决了 采用传统试验方法进行温升试验难以满足异步牵引电机超 速试验要求的难题。 异步牵引电机超速试验需要在热状态下进行,目前在 工厂试验条件下的电机加热方法主要有直接负载法加热, 烘焙加热,等效负载法。使用直接负载法由于能耗类负载 耗能大、经济性差等因素现在已很少使用,被普遍采用的 热试验方式是通过联轴器将被试电机与陪试电机机械连接
实现对拖升温,但是对于已压装或热套联轴器的电机来说,在加热稳定后难以在极短时间内迅速将其拆除并脱离陪试电机,此外受陪试电机型号,转轴系同轴度以及转动惯量的影响,也无法让陪试电机实现同步超速。对电机进行整体烘焙容易造成轴承内油脂迅速稀释流失,若将电机解体只烘焙定子部分,则加热后的电机在装配后又会冷却,均难以达到超速试验要求。本文采用定子叠频法进行异步牵引电机加热试验,以满足热态下的超速试验要求。 试验原理分析 定子叠频法热试验主接线图如图1所示,其核心思想是将两种不同频率的主电源和副电源串联后作为被试电机M的供电电源,在被试电机绕组上产生类似于直接负载法的损耗从而达到加热的效果。一般主电源选择频率为50Hz 的工频交流电源,为确保被试电机在额定电压下的运行,主电源电压等级与被试电机相同,副电源频率一般低于主
三相异步牵引电动机的效率计算 参照日本标准JEC-37-1979《感应电机》,以YQ-420型牵引电动机效率计算为例,介绍了三相异步牵引电动机的效率计算方法。 标签:三相异步牵引电动机;效率;计算。 0 引言 从节约能源,保护环境出发,高效异步电动机是目前国际发展的趋势。随着我国地铁和城市轻轨的快速发展,“绿色、节能、环保、安全”成为城轨车辆市场竞争的主题,而作为城轨车辆的心脏-电动机,也面临国际社会的巨大竞争压力和挑战。从国际和国内发展趋势来看,开发高性能异步电动机是必要的,而电动机的效率又是衡量电动机性能好坏的重要技术经济指标之一。效率计算作为电动机型式试验中重要试验之一,通常都是参照GB/T 1032-2005《三相异步电动机试验方法》中的方法进行计算,本文将以YQ-420型牵引电动机型式试验中效率计算为例,参照日本标准JEC-37-1979《感应电机》中的损耗分离法和圆线图法,介绍三相异步电动机的效率计算方法。 1 概述 YQ-420型异步牵引电动机是南车株洲电机有限公司生产的安装在动车组检测车上的4极鼠笼式三相感应电动机,它采用强迫通风冷却方式(28m3/min), 额定功率是420 kW。正弦波电源供电型式试验采用代用额定电压880V,代用额定电流130A,代用额定频率50 Hz,代用额定转速1457r/min进行试验。要进行效率计算,首先需测量牵引电动机定子绕组的冷态电阻,再进行负载试验和空载试验,测试出相应的参数后,根据相应的公式进行效率计算。 2 计算方法 2.1 冷态电阻的测量 将YQ-420型电动机放置在室内并在稳定的环境温度中持续24小时以上,当绕组温度与环境温度之差不超过2K时,测量电机定子绕组的三相直流线电阻 值R UV=0.1446Ω、R VW=0.1447Ω、R UW=0.1446Ω,环境温度θ1=16.6℃。按式(1)和式(2)计算相电阻值R0。 R0=R med-R vw(1)
无刷直流电动机简介和基本工作原理 无刷直流电动机简介和基本工作原理 无刷直流电动机简介 直流无刷电机 : 又称“无换向器电机交一直一交系统”或“直交系统” 。是将交流电源整流后变成直流, 再由逆变器转换成 频率可调的交流电, 但是, 注意此处逆变器是工作在直流斩波方式。 无刷直流电动机Brushless Direct Current Motor ,BLDC, 采用方波自控式永磁同步 电机,以霍尔传感器取代碳刷换向器, 以钕铁硼作为转子的永磁材料; 产品性能超越传统直流电机的所有优点, 同时又解决了直流电机碳刷滑环的缺点, 数字式控 制, 是当今最理想的调速电机。 无刷直流电动机具有上述的三高特性, 非常适合使用在24 小时连续运转的产业机械及空调冷冻主机、风机水泵、空气压缩机负载; 低速高转矩及高频繁正反转不发热的特性,更适合应用于机床工作母机及牵引电机的驱动; 其稳速运转精度比直流有刷电机更高, 比矢量控制或直接转矩控制速度闭环的变频驱动还要高, 性能价格比更好, 是现代化调速驱动的最佳 选择。 基本工作原理 无刷直流电动机由同步电动机和驱动器组成,是一种典型的机电一体化产品。同步电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。而转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速 度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始
第四节、交流牵引电动机 三相交流牵引电动机(包括变频异步牵引电动机和自控同步牵引电动机)是随着现代大力率变流技术的迅速发展而发展起来的,除工业上应用以外,现已被成功地应用于铁道干线车和高速动车上。 异步牵引电动机转子上没有换向器及带绝缘的绕组,不存在换向火花和环火稳定性问题,因此,它结构简单、运行可靠,可以以更高的圆周速度运转,使机车具有很宽的调速范围。 1.交流牵引电动机的技术优越性 由于交流牵引电动机没有换向器工作面圆周速度的限制,因而可以选用高的转速和大的传动比,这样,能显著减轻电机的重量,以获得较大的单位重量功率。另外,交流电动机充分利用了原直流电机换向器所占的空间,热量能沿定子圆周均匀散发,改善了电机的冷却效果,明显地增长了电机的寿命。交流电机的优越性可由下表所示的德国电力机车用的两种电机参数比较中得到证实,也可由日本东洋电机公司制造的交流、直流牵引电机参数比较得到证明。 两种不同类型牵引电动机参数比较表1 电机种类 三相异步电动机 脉流电动机 型号 BQCA843 UZll6—64K 安装机车型号 BRl20 181.2 功率(kW) 1400 1360(5rnin) 持续功率(kW) 1400 810 电机电压(V) 2200
360(相) 830 最大转速(r/min) 3600 1860 转子直径(mm) 930 950 重量(kg) 2380 3630 单位重量功率(kW/kg) 0.588 0.375 由上表可以看出,对于中小型容量的电机,在大致相同的重量和外型尺寸情况下牵引电动机的功率一般比直流电动机的功率大30%。中、小容量交、直流电机参数比较表2 电机类型 交流异步电动机 直流牵引电动机 型号 TDK6200-A TDK8270-A 小时功率(kW) 165 130 小时转速(r/min) 1565 L450 绝缘等级 C
牵引电机的常见故障 与处理
目录 前言…………………………………………………………一牵引电机的主要特点……………………………………二牵引电机的结构…………………………………… 1定子………………………… 2转子………………………… 3电刷装置………………………… 4电枢轴承………………………… 三牵引电机的传动和悬挂方式……………………… 1个别传动 2组合传动 四牵引电机的工作原理……………………… 五牵引电动机的维护保养……………………… 六牵引电机的故障分析与处理……………………………… 参考文献……………………………………………………后语………………………………………………………
摘要: 本设计简要主要介绍了牵引电机的工作原理、基本结构、主要特点及维护保养,对ZD114型牵引电机在运用中的常见故障进行了分析,并提出了相应处理方法。 关键词: 牵引电机故障检修措施
前言 牵引电机是驱动机车车辆动轮轴的主电机,是电传动机车、车辆的主要部件之一。是在机车或动车上用于驱动一根或几根动轮轴的电动机。牵引电动机有多种类型,如直流牵引电动机、交流异步牵引电动机和交流同步牵引电动机等。直流牵引电动机,尤其是直流串励电动机有较好调速性能和工作特性,适应机车牵引特性的需要,因此获得广泛应用。 ZD114型牵引电机是SS6B型电力机车的重要部件之一,由于牵引电机在运用中受振动、摩擦、高温和自然老化等原因使机车电机性能总处于自然磨损状态,超过一定限度就会发生故障,影响机车的正常运用,所以,要采取一系列的计划预防修理措施,在电机各零部件损坏以前得到修理,从而减少和防止机车出现先期损坏的可能性,达到保证行车安全和延长机车使用寿命的目的。 一牵引电机的工作特点 1 使用环境恶劣 由于牵引电机安装在车体下面,直接受到雨、雪、潮气的影响,机车运行中掀起的尘土也容易侵入电机内部。此外,由于季节和负载的变化,还经常受到温度和湿度变化的影响。因此,电机绝缘容易受潮、受污,对其性能和寿命产生极为不良的影响。所以,牵引电机的绝缘材料和绝缘结构应具有较好的防潮,防尘性能及良好的通风、散热条件。 2 外形尺寸受限制 牵引电动机悬挂在车体下面,其安装空间受到很大的限制,轴向尺寸受轨距限制,径向尺寸受动轮直径的限制。为了获得尽可能大的功率,要求牵引电机结构必须紧凑,并采用较高等级的绝缘材料和性能较好的导电、导磁材料。 3 动作力大 机车运行通过钢轨不平顺处,因撞击而产生的动力作用会传递给牵引电动机,使牵引电动机承受很大的冲击和振动。 4 换向困难 直、脉流牵引电机换向困难的原因除了受机械振动力方面的影响外,还有电器方面的原因,如牵引电动机经常启动、制动,此时电流可达额定电流的两倍;当机车在长大坡道上运行时,电动机将长时间处于过电流状态;当机车高
同步电机与异步电机的区别? 同步与异步的最大区别就在于看他门的转子速度是不是与定子旋转的磁场速度一致,如果转子的旋转速度与定子是一样的,那就叫同步电动机,如果不一致,就叫异步电动机。 当极对数一定时,电机的转速和频率之间有严格的关系,用电机专业术语说,就是同步。异步电机也叫感应电机,主要作为电动机使用,其工作时的转子转速总是小于同步电机。 所谓“同步”就是电枢(定子)绕组流过电流后,将在气隙中形成一旋转磁场,而该磁场的旋转方向及旋转速度均与转子转向,转速相同,故为同步。异步电机的话,其旋转磁场与转子存在相对转速,即产生转距。 同步电机的转速是和频率极数恒定的满足转速=60乘以频率除以极对数(同步转速)不随负荷的改变而该改变异步电机的转速永远低于同步转速但是带额定负荷时转速很接近同步转速随着负荷的增加转速会下降。所以叫异步电机 同步电机的转子有转子线圈和鼠龙,通入励磁电流。而异步电机只有鼠龙(铜条)。同步电机转速恒定,而异步电机低于同步转速 同步电机与异步电机的区别及工作原理? 同步电机和异步电机的主要区别是:同步电机能与其定子磁场旋转达到同步转速,异步电机转速达不到定子磁场的同步转速。 电机大致分成三种,同步机,异步机(以上两种多与电网相连),还有个直流电机。 下面的内容是一个过渡,只作为对电机(同步机、异步机)原理性的知识进行形象的讲解(懂电机的可跳过)。 同步机和异步机,这两个东西都是交流电机,利用了三相交流电的比较有意思的一个特性:简单的说如果把三个线圈像搅拌器(就是家里用来打鸡蛋的那种东西)那样布置,三个线圈相互不接触,分别加上abc三相电压,于是产生三相电流,接着好玩的事情就发生了,线圈所围的空间内出现了与所加电压同频的旋转磁场(若要更深入的解释,就得说驻波的分解,叠加,比较麻烦)。所以人们把线圈按照上述所说的办法,嵌进定子,于是转子所在的那个空间就产生了旋转的磁场。 有了这个磁场就好办了,我们就可以想象定子处有一个看不见的磁铁在转,此时如果转子是个磁铁的话,那么转子不就被带动起来了么,就是电动机了,反之如果转子带动那个看不见的磁铁,就成了发电机了(首先转子带动那个虚拟磁铁,转子肯定受个阻力矩吧,虚拟磁铁受个动力矩吧,注意!力是能量转换的中介(或者说是标志),虚拟磁铁毕竟是虚拟的,定子又不动,那么定子肯定地获得电动势喽。如定子带负载的话,就会有电流,还是三相的,有电流就会有磁场,干扰转子产生的磁场,这个叫做
异步牵引电动机工作原理 1.牵引电机的主要运行原理 定子通上三相交流电后,在气隙中产生旋转的磁场,该磁场切割转子导条后在转子导条中产生感应电流,带电的转子导条处于气隙旋转磁场中就要产生电动力,使转子朝定子旋转磁场的同一方向旋转。由于转子导条中的电流是因转子导条切割由定子绕组产生的气隙磁场才感应产生的,所以转子的转速只能低于气隙旋转磁场的转速,永远不可能与其同步,否则转子导条与气隙磁场同步旋转,转子导条不再切割磁场产生感应电流和产生电动力了,转子也不可能旋转了,所以称按这种原理运行的电机为异步电动机。 2.牵引电机的调速原理 现在机车用异步牵引电机调速普遍采用变频变压调速技术。异步电机转速、电动势和电磁转矩公式如下: 转差率s=(n1-n)/n 转速n=60f/p(1-s) 电动势E1=4K1 f N s K dp1φ 电磁转矩T em=CφI r COS? n1:同步转速(旋转磁场)n:转子转速;f:定子频率;s:转差率;p:电机极对数;E1:电动势;K1:波形系数; N s:每相串联匝数;K dp1:绕组系数;φ:磁通;T em:电磁转矩;C:常数;I r:转子电流;COS?:功率因数。 改变定子频率即可改变电机转速,随着定子频率的增加,电机转速相应增加,如果电压不增加,将导致电机磁场减弱,电机转矩将降低,电机磁场降到很低时,电机不能输出足够的转矩,不能满足负载要求;另一方面,低频起动时,如果电压很高,将导致电机过分饱和。因此异步电机变频时,电压也应在一定范围内保持一定比例的变化,这种调速方式称之为变频变压调速。异步牵引电机变频调速主要采用了恒转矩变频调速(恒磁通变频调速的一个区段,磁通和电流不变)、恒磁通变频调速、恒功率变频调速等调速方式。 3. 异步电机牵引与再生制动原理: 在1>s>0的范围内,电磁转矩与转子转向相同,它拖动转子旋转,电机从逆变器吸收电能转换为机械能,克服机车阻力驱动机车运行,处于电动机运行状态。 s=1为起动运行状态(启动瞬间,转子转速n=0,s=1)。
城轨车辆用牵引电机分析 学院:电气工程学院 班级:磁浮01 学号:20121485 姓名:孟振强
城轨车辆牵引—永磁同步电机 一.永磁同步电机的原理 在电动机的定子绕组中通入三相电流,在通入电流后就会在电动机的定子绕组中形成旋转磁场,由于在转子上安装了永磁体,永磁体的磁极是固定的,根据磁极的同性相吸异性相斥的原理,在定子中产生的旋转磁场会带动转子进行旋转,最终达到转子的旋转速度与定子中产生的旋转磁极的转速相等,所以可以把永磁同步电机的起动过程看成是由异步启动阶段和牵入同步阶段组成的。在异步启动的研究阶段中,电动机的转速是从零开始逐渐增大的,造成上诉的主要原因是其在异步转矩、永磁发电制动转矩起的磁阻转矩和单轴转子磁路不对称,等一系列的因素共同作用下而引起的,所以在这个过程中转速是振荡着上升的。在起动过程中,只有异步转矩是驱动性,电动机就是以这个转矩来得以加速的 , 其他的转矩大部分以制动性质为主。在电动机的转速由零增加到接近定子的磁场旋转转速时,在永磁体脉振转矩的影响下永磁同步电机的转速有可能会超过同步转速,进而出现转速的超调现象。但经过一段时间的转速振荡后,最终在同步转矩的作用下被牵入同步状态。 二.永磁同步电机的结构 永磁同步电机主要是由转子、端盖、及定子等各部件组成的。一般来说,永磁同步电机的最大的特点是它的定子结构与普通的感应电机的结构非常的相似,主要是区别是转子的独特的结构与其它电机形成了差别。和常用的异步电机的最大不同则是转子的独特的结构,
在转子上放有高质量的永磁体磁极。由于在转子上安放永磁体的位置有很多选择,所以永磁同步电机通常会被分为三大类:内嵌式、面贴式以及插入式,如图1.1所示。永磁同步电机的运行性能是最受关注的,影响其性能的因素有很多,但是最主要的则是永磁同步电机的结构。就面贴式、插入式和嵌入式而言,各种结构都各有其各自的优点。 面贴式的永磁同步电机在工业上是应用最广泛的,其最主要的原因是其拥有很多其他形式电机无法比拟的优点,例如其制造方便,转动惯性比较小以及结构很简单等。并且这种类型的永磁同步电机更加容易被设计师来进行对其的优化设计,其中最主要的方法是设计成近似正弦的分布把气隙磁链的分布结构,将其分布结构改成正弦分布后能够带来很多的优势,例如它所带来的负面效应,能减小磁场的谐波以及应用以上的方法能够很好的改善电机的运行性能。插入式结构的电机之所以能够跟面贴式的电机相比较有很大的改善是因为它充分的利 用了它设计出的磁链的结构有着不对称性所生成的独特的磁阻转矩 能大大的提高了电机的功率密度,并且在也能很方便的制造出来,所
异步电动机正反转工作原理-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
异步电动机正反转线路图 工作原理: 三相异步电动机接触器联锁的正反转控制的线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB1和反转按钮SB2控制。这两个接触器的主触头所接通的电源相序不同,KM1按L1-L2-L3相序接线,KM2则对调了两相的相序。控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。 接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。同样,当接触器 KM2得电动作时,KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。 一、正向启动 1、合上电源开关QS,接通三相电源。 2、按下正向启动按钮SB1,KM1通电吸合并自锁,三触头闭合接通电动机,电动机这时的相序是L1,L2,L3,即正向运行。 二、停止控制 按下SB3,整个控制电路失电,接触器各触头复位,电机失电停转。 三、反向启动 1、合上电源开关QS,接通三相电源。
2、按下反向启动按钮SB2,KM2通电吸合并通过辅助触点自锁,常开触头闭合换接了电动机三相电源相序,这时电动机的相序是L3,L2,L1,即反向运行。
YQ-190异步牵引电机电磁场有限元 分析 杨云峰李丽 (南车株洲电机有限公司湖南株洲 412001) 摘要:电机是一个由非线性、多变量、多物理场耦合关系构成的能量转换装置,铁路用异步牵引电机具有较复杂的运行特性,为了更好的分析异步牵引电机的运行特性以及不同环境下电机参数变化。本文借助Ansoft公司的Maxwell 2D模块,建立一种功率为190kW地铁车辆用异步牵引电机模型,通过电磁场有限元软件分析异步牵引电机在不同的运行状态下电机参数及磁密变化曲线,这就为异步牵引电机的优化设计提供了理论性依据。 关键词:牵引电机,运行特性,特性曲线,有限元 Finite Element Analysis on Electromagnetic Field of YQ-190 Traction Motor Yangyunfeng LiLi (CSR Zhuzhou Electric Locomotive Co, Ltd., Hunan Zhuzhou 412001) Abstract: Motor is a nonlinear, multivariate, multi-physics coupling between composition, Especially with the more complex asynchronous traction motor operating characteristics. In order to better analyze the performance characteristics of asynchronous traction motor and the motor parameters under different operating characteristics, the internal field distribution. With this module Ansoft's Maxwell 2D, The establishment of a subway car with a power of 190kW asynchronous traction motor model, By finite element software, Analysis of asynchronous traction motors running at different magnetic flux density of the motor parameters and the characteristic curve, This is the optimal design of asynchronous traction motors to provide a theoretical basis. Key words: traction motor; operating performance; characteristic curve; finite element analysis 0 引言 地铁车辆用异步牵引电机具有频繁起动、制动的特点。在两站之间运行包括牵引、惰性、制动三个阶段[1]。牵引工况包括三个阶段:恒转矩、恒功、自然特性;惰性运行是在停止牵引或制动,只在阻力作用下运行的状态;制动运行状态电机运行过程与牵引运行时相反。 本文采用Ansoft公司推出的Maxwell 2D软件进行有限元仿真,就牵引电机在牵引工况下三个运行阶段进行分析。本文分析的异步牵引电机在额定网压1500V时牵引特性如图1。通过对比分析电机在恒转矩起始点、恒功起始点、自然特性起始点、最高速度点的电机参数及电磁场分布图形,并与试验结果进行对比,说明仿真结果的合理性。为今后牵引电机的研发制造提供一种比较适用的分析方法[2]。 1电机模型的建立
三相异步电动机结构与工 作原理 Prepared on 22 November 2020
三相异步电动机结构与工作原理 三相异步电动机 实现电能与机械能相互转换的电工设备总称为电机。电机是利用电磁感应原理实现电能与机械能的相互转换。把机械能转换成电能的设备称为发电机,而把电能转换成机械能的设备叫做电动机。 在生产上主要用的是交流电动机,特别三相异步电动机,因为它具有结构简单、坚固耐用、运行可靠、价格低廉、维护方便等优点。它被广泛地用来驱动各种金属切削机床、起重机、锻压机、传送带、铸造机械、功率不大的通风机及水泵等。 对于各种电动机我们应该了解下列几个方面的问题:(1)基本构造;(2)工作原理;(3)表示转速与转矩之间关系的机械特性;(4)起动、调速及制动的基本原理和基本方法;(5)应用场合和如何正确使用。 三相异步电动机的结构与工作原理 1.三相异步电动机的构造 三相异步电动机的两个基本组成部分为定子(固定部分)和转子(旋转部分)。此外还有端盖、风扇等附属部分,如图5-1所示。 图5-1三相电动机的结构示意图 1).定子 三相异步电动机的定子由三部分组成:
2).转子 三相异步电动机的转子由三部分组成: 鼠笼式电动机由于构造简单,价格低廉,工作可靠,使用方便,成为了生产上应用得最广泛的一种电动机。 为了保证转子能够自由旋转,在定子与转子之间必须留有一定的空气隙,中小型电动机的空气隙约在~1.0mm之间。 2.三相异步电动机的转动原理 1).基本原理
为了说明三相异步电动机的工作原理,我们做如下演示实验,如图5-2所示。 图5-2三相异步电动机工作原理 (1).演示实验:在装有手柄的蹄形磁铁的两极间放置一个闭合导体,当转动手柄带动蹄形磁铁旋转时,将发现导体也跟着旋;若改变磁铁的转向,则导体的转向也跟着改变。 (2).现象解释:当磁铁旋转时,磁铁与闭合的导体发生相对运动,鼠笼式导体切割磁力线而在其内部产生感应电动势和感应电流。感应电流又使导体受到一个电磁力的作用,于是导体就沿磁铁的旋转方向转动起来,这就是异步电动机的基本原理。 转子转动的方向和磁极旋转的方向相同。 (3).结论:欲使异步电动机旋转,必须有旋转的磁场和闭合的转子绕组。 2).旋转磁场 (1).产生 图5-3表示最简单的三相定子绕组AX、BY、CZ,它们在空间按互差1200的规律对称排列。并接成星形与三相电源U、V、W相联。则三相定子绕组便通过三相对称电流:随着电流在定子绕组中通过,在三相定子绕组中就会产生旋转磁场(图5-4)。
铁路机车异步牵引电动机的轴承结构 李进泽 (南车株洲电机有限公司,湖南 株洲 412001) 摘 要:对于结构简单、维护量少的铁路机车异步牵引电动机来说,作为其关键部件之一的轴承往往是其中一个薄弱点,其运转情况的好坏在很大程度上直接影响异步牵引电动机的运行可靠性,因此电机设计时,必须合理设计其轴承结构,包括选择合适的轴承、设计正确的润滑系统和可靠的密封结构。 关键词:铁路机车异步牵引电动机、轴承、轴承结构、润滑、密封 0 引言 三相交流传动机车首先必须满足的要求是,对于铁路重载货运机车,能连续产生较大的牵引力;对于铁路高速客运机车,一级齿轮传动装置能得到较高的机车速度,因此要求铁路机车异步牵引电动机转矩要大、转速要高。另一方面由于受到铁路机车车轮直径、两车轮内侧距离和机车下部限界的限制,要求异步牵引电动机体型相对地越来越小。同时,逆变器供电又会造成异步牵引电动机轴承强振动、高温升、轴承电蚀等不利影响。 因此,异步牵引电动机设计时,必须仔细分析其轴承常常需承受高转速、高负荷、高温升、强振动等苛刻运行条件的特殊性,有针对性地设计轴承结构,并采取相应措施。 1 轴承类型及其布置 为简化结构,降低成本,铁路机车牵引电机一般尽可能采用单侧传动,一般采用两轴承结构(如图1),传动端采用较大的NU 型圆柱滚子轴承,作为非定位轴承,仅承受径向负荷;而非传动端采用定位轴承,除承受径向负荷外,还承担电机轴的轴向定位和轴向负荷,一般采用NH 型、NUP 型、NUH 型圆柱滚子轴承,或向心球轴承,还可采用组合结构(如图2,TGV 异步牵引电机轴承结构)。 采用人字形小齿轮时,人字齿轮已轴向定位,两端轴承必须都为非定位轴承,如ICE 动车异步牵引电机BAZ7096。 图1 两轴承结构的异步牵引电动机 图2非传动端采用组合轴承结构 2 轴承转速 异步牵引电动机轴承选择除考虑轴承的受力负荷外,还要着重考虑高转速和轴承电蚀这两个不利因素。 异步牵引电动机转速的限制除取决于其自身(主要是转子)的强度和刚度外,在很大程度上取决于逆变器所能提供的最高频率以及轴承的许用速度。 一般异步牵引电动机的最高转速都比较高,不少都高于轴承样本中所列的极限转速(特别是传动端),如BR120机车异步牵引电机最高工作转速(4500r/min )为其传动端轴承(NU322)脂润滑的极限转速(轴承样本推荐2000r/min )的2倍多,超过该轴承油润滑的极限转速(2600r/min )的70%,也超过非传动端轴承(NJ318带角环HJ318)脂润滑时的极限转速(2800r/min )的60% [1]。 作者简介:李进泽( 1967—),男,1990年毕业于浙江大学电机专业,高级 工程师,首席设计师,主要从事轨道交通异步牵引电动机、石油钻机变频电机、风力发电电机的研究开发。
摘要 随着电机控制技术的不断发展,在实际中应用越来越多的交流调速系统已经取代了直流调速系统。由于异步电机是一种复杂的多变量的、强耦合的非线性系统,所以利用计算机仿真的办法构造一个实验系统进行异步电机的分析是一种很好的研究手段。 本文主要首先介绍三相异步牵引电动机结构和构造建立电机数学、物理模型,对比直流电机电磁转矩和异步电动机电磁转矩,结合矢量控制的基本思想和基本概念,完成了对三相交流异步牵引电动机在三相静止坐标和两相静止坐标系上的数学模型,经过坐标转换得到交流牵引电机的模型。然后通过Matlab/Simulink的模块简化搭建功能完成三相异步牵引电动机最终的仿真模型,并在Mutlab系统环境下实现对电动机的仿真,观察异步电机空载转矩和负载转矩过程中的电流、转速、转矩的变化,对结果与理论结果进行比对分析,证实了该方法的简便直观、高效快捷和真实准确性。 关键词:异步电机;建模;仿真;坐标变换;
Abstract With the development of motor control technology, AC drive system is used more and more in practice has replaced the DC speed regulating system. The asynchronous motor is a strongly coupled nonlinear system is a complex multivariable, using the way of constructing, analysis and computer simulation of an experimental system of asynchronous motor is a very good research tools. This paper first introduces the structure and the structure of three phase a synchronous traction motor mathematical, physical model of motor, compared with DC motor electromagnetic torque and asynchronous motor electro magnetic torque, combined with the basic theory of vector control and the basic concept,the mathematical model in the three-phase static coordinate and two-phase static coordinate system on the three phase asynchronous traction motor, the AC traction the motor model to get the coordinate conversion. Then through the Matlab/Simulink module to simplify the building function to finish the simulation model of the three-phase asynchronous traction motor end, and realize the simulation of the motor in the environment of Mutlab system, variable current,speed, torque of asynchronous motor load torque and load torque in the process, the results were compared with the theoretical results and analysis,confirmed this method simple and intuitive, fast and accurate. KeyWords: Induction motor, Modeling, Simulation, Coordinate transformation