
4.6 飞行时间计数器
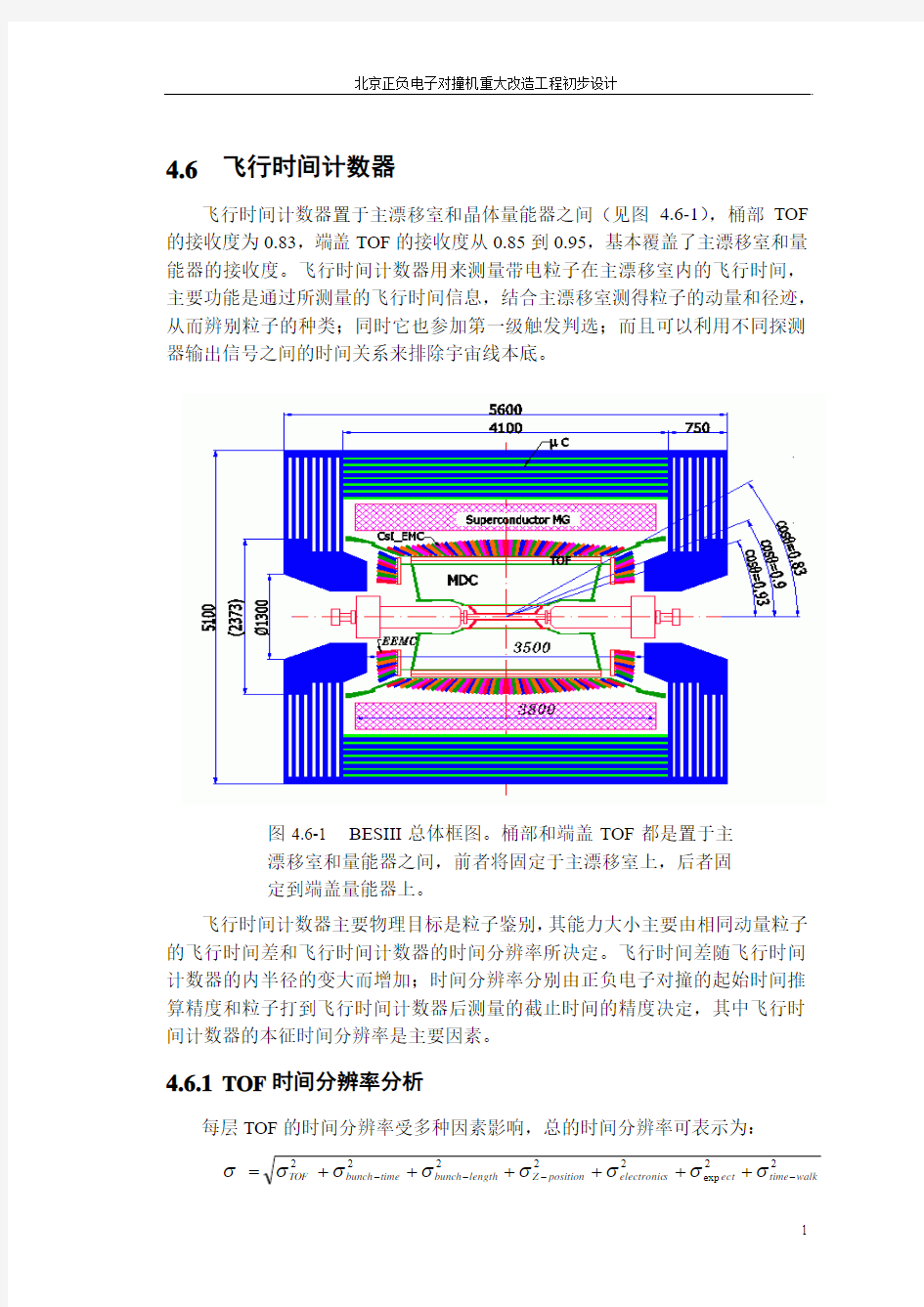
飞行时间计数器置于主漂移室和晶体量能器之间(见图 4.6-1),桶部TOF 的接收度为0.83,端盖TOF 的接收度从0.85到0.95,基本覆盖了主漂移室和量能器的接收度。飞行时间计数器用来测量带电粒子在主漂移室内的飞行时间,主要功能是通过所测量的飞行时间信息,结合主漂移室测得粒子的动量和径迹,从而辨别粒子的种类;同时它也参加第一级触发判选;而且可以利用不同探测器输出信号之间的时间关系来排除宇宙线本底。
飞行时间计数器主要物理目标是粒子鉴别,其能力大小主要由相同动量粒子的飞行时间差和飞行时间计数器的时间分辨率所决定。飞行时间差随飞行时间计数器的内半径的变大而增加;时间分辨率分别由正负电子对撞的起始时间推算精度和粒子打到飞行时间计数器后测量的截止时间的精度决定,其中飞行时间计数器的本征时间分辨率是主要因素。
4.6.1 TOF 时间分辨率分析
每层TOF 的时间分辨率受多种因素影响,总的时间分辨率可表示为:
22exp 2222
2walk
time ect s electronic position Z length bunch time bunch TOF ----++++++=σσσσσσσσ图4.6-1 BESIII 总体框图。桶部和端盖TOF 都是置于主漂移室和量能器之间,前者将固定于主漂移室上,后者固定到端盖量能器上。
1) TOF σ, TOF 本征时间分辨。
TOF 本征时间分辨与闪烁体和光电倍增管的性能、参数直接相关,如下面的公式所示[1]:
其中,scin τ是闪烁体的衰减时间,L 是击中位置到光电倍增管的距离,
PMT τ是光电倍增管中光电子的渡越时间涨落,pe N 是光电子数。 pe N 与闪烁体的光产额、
厚度、衰减长度、光传输距离和光电倍增管的量子效率都有关:
其中,λ是光波长, )(0λN 是单位厚度闪烁体的光产额, t L 是粒子穿过闪烁体的厚度,a L 闪烁体的衰减长度, )(λε是光电倍增管的量子效率函数。根据我们和BELLE 的经验,我们希望单层TOF 的本征时间分辨率达到80ps (参见后面4.6.4 and 4.6.5)。
2) time bunch -σ, 束团时间不确定性。
束团时间的不确定性与加速器储存环中的高频时钟和稳相精度有关。根据BEPCII 的设计指标,其高频时钟周期为2ns ,稳相精度为1°,所以本征的束团时间误差为5ps 。考虑到在读出过程中,时钟信号传输和寄存等会造成时间晃动,我们希望这项误差达到20ps 以内。
3) length bunch -σ, 束团长度形成的对撞时刻的不确定性。
正负电子两个束团都有一定长度,这样它们相撞的准确时刻无法知道。根据BEPCII 的设计指标,束团长度为1.5cm ,即50ps 。两束团相撞可以简化考虑为一个静止、一个运动,相撞发生的几率是两个束团密度的乘积。这样,如果考虑两个束团密度都按高斯分布,其标准偏差将不确定性减少2倍,即 35ps 。
4) position Z -σ, 来源于粒子击中闪烁体的Z 向定位的不确定性。
在测量飞行时间时,闪烁体中的光传输时间必须要扣除。其精度取决于由MDC 径迹重建外推的闪烁体的Z 向定位。根据模拟,其精度为几个毫米,考虑到闪烁体折射率为1.5, 这项误差约为25ps 。
5) s electronic σ, 来源于电子学时间测量。
TOF 电子学时间测量将使用CERN HPTDC ,其设计指标为25ps 。 6) ect exp σ, 来源于预期飞行时间不确定性。
pe
PMT scin TOF
N c L n n ??
????????+??????-+=2
2
222)1()35.21(ττσ?-∝λ
λελd e L N N a L L t pe )()(/0
TOF 粒子鉴别能力受测量与预期的粒子飞行时间之差影响。预期的粒子飞行时间的精度取决于径迹长度和动量的精度,即MDC 的性能。根据模拟,径迹长度的重建误差为毫米量级。在1Tesla 时,MDC 动量分辨率为0.6%。所以,我们估计ect exp σ的误差约为 30ps 。
7) walk time -σ ,来源于电子学阈效应的时间修正过程。
图 4.6-2 过阈甄别时间测量的修正
TOF 的时间测量将采用过阈甄别,这样对幅度不同的信号将产生测量误差,所以在刻度重建过程里将利用幅度值进行修正,修正的精度取决于幅度测量的精度和阈值的高低。为提高修正精度并压低本底,我们将采用四阈读出的方法,依次可能为200mV 、150mV 、 100mV 、 50mV 。
考虑上升时间为3ns ,幅度测量精度为 4mV , 此项误差将在10ps 左右(见图4.6-2)。
TOF 的飞行时间测量精度估计详见下表4.6-1:
h
h threshold
high threshold
low l time rise signal
h t V V t t V V
t ?=
??≈?--- ,
l
表4.6-1 TOF 时间分辨率分析
4.6.2 粒子鉴别能力
根据TOF 的几何尺寸,可以计算出相同动量K/π粒子的飞行时间差ΔT ,再根据TOF 的时间分辨率σTOF ,按照理想的高斯分布,我们可以估算出K/π分辨能力:
ΔT>3.38σTOF ,正确率>95.4%,即满足2σ鉴别能力; ΔT>5.60σTOF ,正确率>99.7%,即满足3σ鉴别能力。
由于随粒子击中闪烁体的位置距光电倍增管距离的不同而得到的时间分辨率不同,在靠近光电倍增管一端时间分辨好,在中间时间分辨差。我们根据实验经验,初步确定时间分辨随粒子方向的极角的变化关系为:
其中)cos(θ=x ,θ是极角,)0(σ是打中闪烁体中心位置时TOF 的时间分辨率。
对于TOF ,测量的相同动量K/π粒子的飞行时间差ΔT 是指它们在主漂移室
内的飞行时间差,即: π
MD C K MD C T T T -=?。
这里,一层TOF 电子和muon 的设计分辨率为100~110ps ;由于K/π粒子的强相互作用,并根据BESI 、BESII 和BELLE 的飞行时间计数器的经验,K/π粒子的时间分辨比电子和muon 要差约20%。所以,ps 125)0(=σ。同理,对于双层TOF ,ps 105)0(=σ。
据此,图4.6-3给出了一层和双层TOF 的K/π分辨能力。在2σ鉴别能力的要求下,K/π分辨分别可以达到0.8GeV/c 和0.9GeV/c 。
)
3.01()0()(2x x -?=σσ
图 4.6-3 K/π分辨能力
关于端盖TOF,我们计划使用扇型的塑料闪烁体加光电倍增管测量。端盖闪烁体的宽度增加,但长度减少为约400mm,预计其本征时间分辨仍然可以达到80ps。考虑达到端盖附近的粒子穿越主漂移室的层数较少,所以由主漂移室径迹重建的外推定位不如桶部准确,其误差估计为10mm,导致时间不确定性为50ps。再把束团长度、多束团间隔、电子学测量精度等影响都考虑后,端盖飞行时间计数器的总时间分辨率为110ps。
4.6.3BESII和BELLE的经验
BESII[2]的飞行时间计数器始建于1994年,于1996年底建成。其桶部由48个闪烁计数器组成,每个闪烁计数器的塑料闪烁体长2840mm,宽1560mm,厚50mm,其材料为Bicron 公司生产的BC408。每个闪烁体的两端经鱼尾形光导与光电倍增管相连,其有效收光面积仅为16%(见图4.6-4)。光电倍增管采用的是HAMAMASTU公司生产的R2490-5,它是Fine Mesh结构的抗磁场光电倍增
管,其增益为3?106 (0T),1?106 (0.5T)。
BESII 的飞行时间计数器的总时间分辨率为180ps ,其中本征时间分辨为135ps ,其它由束团长度等引起的时间不确定性为125ps 。由于BESII 的飞行时间计数器的内半径较大,达1150mm ,所以在总时间分辨率为180ps 情况下,对于K/π的分辨(2σ)的动量上限为0.8GeV/c ,图4.6-5是BESII 上测得的各粒子速率与动量的关系。
BELLE 的TOF 系统[3]由做触发用的TSC 和做测量时间用的TOF 两部分组成。其TOF 由塑料闪烁体直接连接光电倍增管构成,有效收光面积达60%。塑料闪烁体采用BC408,长2550mm ,宽60mm ,厚40mm 。光电倍增管采用R6680,由于它要工作于1.5T 的强磁场中,其光电倍增管是与HAMAMASTU 公司合作专门研制的,具有24个Fine Mesh 的打拿极,在1.5T 的强磁场中的增益仍能达到3?106 。最后,BELLE 的TOF 的总时间分辨率达到100ps
,其中本征时间
图4.6-5 粒子动量与由TOFII 测量的速度的关系
图4.6-4 BESII 的TOF 探测器的结构示意图
分辨率达到80ps 。
总体来说,TOF 要达到高的时间分辨率,主要由闪烁体光产额、上升时间、厚度、衰减长度,光电倍增管的有效收光面积、量子效率、频谱响应、时间响应、增益大小、抗磁性能等决定。
但是,为什么BESII 的TOF 的本征时间分辨为135ps ,BELLE 的TOF 的本征时间分辨率达到80ps ?它们的主要差别在于前者在闪烁体和光电倍增管之间有一个收光光导,有效收光面积远小于后者,所以要达到新飞行时间器的设计要求,闪烁体和光电倍增管要直接耦合,并尽量增大有效收光面积。
4.6.4 塑料闪烁体和光电倍增管的选择
4.6.4.1 塑料闪烁体:BC408 还是BC404?
对于塑料闪烁体的选择,我们考虑了美国Bicron 公司生产的BC408和BC404。表4.6-2是它们相关的技术参数的比较,可以看出:BC408相比BC404,光产额要少6%,时间性能略慢,但它的衰减长度要长。根据我们的模拟(见4.6.5.3),当闪烁体较短时,BC404较好;当闪烁体较长时,BC408较好,但比较试验还要进行。
(a) (c)
(b) 图4.6-6 BC408性能:(a)发射谱 (b)各种粒子的光输出 (c) 各种粒子的射程。
国家计量技术规范规程制修订 《飞行时间质谱仪校准规范》 (报批稿) 编写说明 中国计量科学研究院 广东省计量科学研究院 南京市计量监督检测院 2013年5月
《飞行时间质谱仪校准规范》(报批稿) 编写说明 一、任务来源 根据国家质量监督检验检疫总局2009年国家计量技术法规计划(国质检量函〔2009〕393号)立项,由中国计量科学研究院、广东省计量科学研究院和南京市计量监督检测院共同承担《飞行时间质谱仪校准规范》的制定工作。 二、规范制定的必要性 飞行时间质谱仪是一种高分辨质谱仪,这类仪器的质量分析器是一个离子漂移管。由离子源产生的离子加速后进入无场漂移管,并以恒定速度飞向离子接收器。离子质量越大,到达接收器所用时间越长,离子质量越小,到达接收器所用时间越短,根据这一原理,可以把不同质量的离子按质荷比的大小进行分离。与高端的傅立叶变换离子回旋共振质谱仪、离子阱静电场轨道阱质谱仪相比,飞行时间质谱仪具有可检测的分子量范围大,扫描速度快,仪器结构简单,价格便宜等优势。近年来随着蛋白质组学和代谢组学的发展,各实验室飞行时间质谱仪的数量迅速增加,这些仪器除了被用于基础科研外,还被广泛地用于样品检测。据不完全统计,各个检测和校准实验室每年使用飞行时间质谱仪出具的报告数量达到1000份以上。根据《ISO/IEC 17025:2005 检测和校准实验室能力的通用要求》,检测校准实验中使用的分析设备都应当经过检定或校准,以保证仪器的准确性和测定结果的可溯源性,从而保证各个检测和校准实验室在不同时间、不同地点测定结果的准确、可比。飞行时间质谱仪由于没有检定规程或者校准规范,无法对仪器进行检定校准,已经成为当前实验室认可工作中的瓶颈之一。通过制定飞行时间质谱仪校准规范,实现仪器的校准,可以保证我国飞行时间质谱仪出具检测报告的准确有效,保护人民大众的健康,保证国际贸易的公平。 三、《飞行时间质谱仪校准规范》的制定过程 1、2008年4月28日,起草小组向主要飞行时间质谱仪生产厂家安捷伦、沃特斯、布鲁克、AB和岛津公司发函,要求其提供各自生产的各种型号的飞行时间质谱仪的质量数范围、质量准确度、信噪比、分辨力、质量数漂移、校准品等信息,作为规范制定时的参考。随后,各个厂家相继返回相应信息。
本技术提供了一种基于飞行时间测量的测量方法及系统,方法包括:主控制单元接收外部输入的启动指令,将所述启动指令发送给探测单元;所述探测单元根据所述启动指令对传送装置执行被检测物的探测处理;当探测到所述传送装置上有被检测物时,生成测量指令发送给所述测量单元;所述测量单元根据所述测量指令启动所述测量单元的光源装置发射检测光,并启动所述测量单元的飞行时间传感识别装置对所述被检测物进行拍摄;所述飞行时间传感识别装置将拍摄得到的一帧三维点云数据传输给所述主控制单元;所述主控制单元对所述三维点云数据进行点云提取、三维重建和分析计算处理,得到所述被检测物的体积。 权利要求书 1.一种基于飞行时间测量的测量方法,其特征在于,所述测量方法包括: 主控制单元接收外部输入的启动指令,将所述启动指令发送给探测单元; 所述探测单元根据所述启动指令对传送装置执行被检测物的探测处理;
当探测到所述传送装置上有被检测物时,生成测量指令发送给所述测量单元; 所述测量单元根据所述测量指令启动所述测量单元的光源装置发射检测光,并启动所述测量单元的飞行时间传感识别装置对所述被检测物进行拍摄; 所述飞行时间传感识别装置将拍摄得到的一帧三维点云数据传输给所述主控制单元; 所述主控制单元对所述三维点云数据进行点云提取、三维重建和分析计算处理,得到所述被检测物的体积。 2.根据权利要求1所述基于飞行时间测量的测量方法,其特征在于,所述测量方法包括: 所述主控制单元根据预置体积值对所述被检测物的体积进行分类,并根据所述分类的结果,生成分类指令,发送给所述传送装置,用以将所述被检测物送入相应的装配区。 3.根据权利要求1所述基于飞行时间测量的测量方法,其特征在于,所述生成测量指令发送给所述测量单元具体为: 所述探测单元生成测量指令发送给所述主控制单元,所述主控制单元启动计时器进行计时,当到达预设时间时,将所述测量指令发送给所述测量单元。 4.根据权利要求1所述基于飞行时间测量的测量方法,其特征在于,所述检测光具体为: 使用脉冲调制方式进行调制得到的波长范围780nm-1100nm的脉冲波。 5.根据权利要求1所述基于飞行时间测量的测量方法,其特征在于,所述飞行时间传感识别装置的分辨率为320×240或480×320。 6.一种基于飞行时间测量的测量系统,其特征在于,所述测量系统包括:传送装置、主控制单元、检测单元探测单元和测量单元;
液相色谱-四极杆/飞行时间质谱联用(HPLC-QTOF) 一、开机 1.打开计算机,LAN Switch电源。 2.打开液相各个模块电源,打开质谱前面的电源开关,等待大约两分钟,当听到第二声溶剂阀切换的声音(表明质谱自检完成)后,仪器可以联机。 3.在计算机桌面上双击MassHunter采集软件图标,进入MassHunter工作站。 4.如果MassHunter工作站在之前曾经打开和关闭过,请确认在再次打开工作站之前,关闭MassHunter所有的进程;双击桌面上的图标,在弹出的窗口点击Shut Down,等待所有的Status都变为Terminated后,点击Close。然后再打开MassHunter工作站。注意:在MassHunter采集软件关闭后,再次打开之前,必须执行上面的操作,否则无法进入采集软件。 5. 点击Standby按钮,检查前级真空(典型值应≤2.5Torr)和高真空,等到高真空≤2×10-6Torr后,关闭工作站。 6. 进入仪器诊断软件界面,在菜单上选择Connection > Connect,输入IP地址 192.168.254.12,点击OK。 根据不同的情况,选择不同的Condition HV的模式。0.6 Hour Cycle (Quick Vent) 适用于Q-TOF短暂关机后的Condition,比如更换泵油,短时间停电等。2 Hour Cycle (Optics Service) 适用于对Q-TOF关机,进行简单维护后的Condition,比如清洗毖绅管等。8 Hour Cycle (TOF Service) 适用于对Q-TOF关机,进行比较长时间的维修后的Condtion,比如仪器出现故障后Agilent工程师上门维修后再次开机。13 Hour Cycle (Installation) 适用于Q-TOF安装时第一次开机后的Condtion;当者是比如长假关机后再次开机。 7. 标签栏显示Instrument ON/OFF界面,点击Condition HV。 8. 当Condition HV结束后,在File菜单上选择Connection > Disconnect,关闭TOF Diagnostics软件。 9. 重新进入MassHunter工作站。 二、调谐和校正
飞行时间质谱精确定标的方法利用飞行时间质谱(TOF)探测得到的数据文件截图如下面左图,导入Origin里如右图: 行号即为横坐标,代表飞行时间,每一行数值代表质谱图中相应点的信号强度,如下图: 我们用工具选取一个已知峰的信号,如水(H2O),见下图,图中显示出该点行号为8642,信号强度为5855:
因为我们已知这个峰代表水(H2O),那么就可以将飞行时间与质量对应起来。 首先我们要了解,质谱探测得到的信号所代表的是这个物种(H2O)的同位素峰([1]H2[16]O),那么它的质量就不是平均分子量,而是由确定组成的核素相加得到的质量。 其次我们要了解,由于我们使用的是真空紫外光电离,那么形成的离子应该只带一个正电荷。 因此,质谱探测到的信号实际上是带一个正电荷的阳离子([1]H2[16]O+)。 我们使用下面这个软件来查询相应的m/z值,Measured mass表示质量数,Tolerence表示误差,单位为毫道尔顿,Charge on Molecule表示粒子所带电荷数,下图中的设置表示我们要查询质量数范围为[17.500, 18.500],带1个正电荷的粒子的可能分子式及其精确质量:
结果给出[1]H2[16]O+的精确质量为18.010016。 将上表拷入Origin中,并做图拟合,步骤如下:
显示下图结果: 将结果粘贴于下表,A、B、C即为定标公式的参数,其含义为m/z=A+B*row+C*row^2: 可自行设计表格,将目标峰的横坐标转化为精确质量数m/z。
Q&A: 1行号究竟代表多少飞行时间? 一行代表2ns,如行号5000,代表飞行时间10000ns。 这是通过P7888数据采集卡附带的采集软件MCDWin设置的,可以更改。 2怎么定更精确、更大范围的质量? 本例只提供了定标方法,对于更精确、更大范围的质量定标,就要提供更多的数据点来拟合。可以通过如下两种途径: 2.1选取一个产物较多的质谱,利用已定好标的公式,计算相应产物或碎片峰的质量, 猜测其真实分子式,并将分子式与其实际质量添加入飞行时间-质量对应表中,重 新拟合得到更精确的定标公式。 2.2若大质量产物的分子式不容易猜测,那么通入少量大质量标准样品进行定标。大质 量标准样品推荐芳香烃化合物,比如萘、蒽、菲等,不推荐使用脂肪烃,进入腔 体后非常不易挥发。 3怎么做横坐标为质量数的质谱图? 按下列步骤: 3.1在数据列左侧插入两列: 3.2将第一列填充为行号:
飞行时间质谱系统 本产品由主机和计算机(含分析软件)组成,其中主机主要由激光器、质量检测器、靶板、真空泵组和开关电源组成。 飞行时间质谱系统Clin-ToF-Ⅱ通过检测生物大分子的分子量,使用蛋白指纹图谱技术,用于对口腔分离的乳酸杆菌、变异链球菌以及白色念珠菌的鉴定。 1.1 产品名称 本仪器全称为飞行时间质谱系统(Clin-ToF-Ⅱ) 1.2 产品型号 1.3 产品结构组成 由主机和计算机(含分析软件)组成,其中主机主要由激光器、质量检测器、靶板、真空泵组和开关电源组成。 2.1外观 外壳应表面整洁,色泽均匀,无伤斑,裂纹等缺陷; 文字和标志应清晰可见;各指示或显示装置应准确清晰; 塑料件应无起泡、开裂、变形以及灌注物溢出现象; 控制和调节机构应灵活可靠,紧固部位应无松动。 2.2技术参数(性能要求) 2.2.1质量测量范围 质谱仪检测离子的质荷比范围为1540Da ~16950Da 。 2.2.2准确度 2.2.2.1内标法 以参考品B完成校对后,参考品A、C的质量漂移应在800ppm内;以参考品D完成校对后,参考品E的质量漂移应在1500ppm内;以参考品F完成校对后,参考品G的质量漂移应在800ppm内。 2.2.2.2外标法 参考品A、B、C、D、E、F、G分别点在靶板上邻近的两点,以其中一点的参考品进行校对,另一点内的参考品质量漂移应在1500ppm内。 2.2.3灵敏度 表示质谱仪在一定信噪比下能够出峰的所需样品量。浓度为10 fmol/μl 的参考品A、浓度为20 fmol/μl的参考品B、浓度为2pmol/μl的参考 品C、浓度为5pmol/μl的参考品D、浓度为10pmol/μl的参考品E条件下,检测参考品A、B、C、D、E,应有信噪比 (S/N) >3的出峰。 2.2.4分辨率 50 < 分辨率 < 3500。 2.2.5重复性 检测参考品A、B、C、D、E物质,重复15次实验,CV<1%。 2.3系统功能
飞行时间法(ToF)CMOS传感器解决方案 据麦姆斯咨询报道,国际知名图像传感器制造商兼专业定制服务商,Teledyne e2v即将亮相第二十届中国国际光电博览会-集结国内外优质通信器件商、设备供应商、系统集成商和运营商一大盛会。欢迎莅临其展位6C46 ">新品展示 用于高速扫描和条码读取的Snappy 2MP CMOS图像传感器Snappy 2MP CMOS图像传感器主要用于条码读取和其他2D扫描应用。这一传感器以独特设计,将全高清、2.8μm低噪全局快门和其他高级功能完美结合,并通过小巧的光学格式,实现快速经济的解码能力。无论是像素表现或是片上集成的实时处理功能,Snappy传感器皆进行了全方位的优化,实现高速准确的1D和2D条码扫描。在物流、分拣、零售POS和其他相关行业应用中,它让扫描平台实现更高的效率和产量。Snappy的独特性能还适用于许多其他应用领域,包括无人机、嵌入式视觉系统、物联网边界装置、智能监控摄像头和增强现实/虚拟现实。Emerald 8.9/12/16MP,全球最细小的全局快门CMOS图像传感器利用最新生产工艺以及像素设计技术,Teledyne e2v Emerald系列CMOS图像传感器,有着全世界范围内最小的全局快门像素尺寸(2.8μm)、底噪、满井容量7ke-,典型读出噪声4e- (低噪模式下2e-)。这一创新型革命技术,可使客户获得更高分辨率,但同时降低光学镜头尺寸,可降低整体系统成本。新一代图像传感器将大大提升暗场非一致性DSNU,与其他CMOS产品比较至少提升10倍,在低光应用中,这一性能可提升相机高温和长时间曝光方面性能,尤其是用于显微镜和户外,比如监控、测速以及交通上等的相机。新一代图像传感器主要发布三种分辨率,16MP(4096 x 4096 pixels), 12MP(4096 x 3072 pixels),和8.9MP(4096 x 2160 pixels),世界上第一个高分辨率下1英寸光学尺寸,可使用C口镜头。每种图像传感器都有相同的像素设计、配置、读出结构、cLGA封装,这可降低相机厂商的研发成本。同时,根据机器视觉工业自动化的更高要求,这一代芯片具备高动态范围(HDR)模式,8/10/12bit ADC转换,高速输出(60fps at 10 bits 1at 16MP),多样化的电节省模式等。 飞行时间法(ToF)CMOS传感器解决方案
飞行时间质谱技术及发展 前言:质谱分析是现代物理与化学领域使用的极为重要的工具。目前日益广泛的应用于原子能,石油以及化工,电子,医药等工业生产部门,农业科学研究部门及物理电子与粒子物理,地质学,有机,生物,无机,临床化学,考古,环境监测,空间探索等领域[1]。飞行时间质谱飞行时间质谱仪较其他质谱仪具有灵敏度好、分辨率高、分析速度快、质量检测上限只受离子检测器限制等优点,再配合电喷雾离子源基体辅助激光解析离子源[2]大气压化学电离源等离子源,使之成为当今最有发展前景的质谱仪。飞行时间质谱已用于研究许多国际最前沿的热点问题,是基因及基因组学、蛋白质及蛋白质组学、生物化学、医药学以及病毒学等领域中不可替代的有力工具,例如肽和蛋白分析、细菌分析、药物的裂解研究以及病毒检测。特别是在大通量、分析速度要求快的生物大分子分析中,飞行时间质谱成为唯一可以实现的分析手段,例如与激光离子源联用或作为二维气相色谱的检测器等。本文将介绍飞行时间质谱的基本原理、技术及仪器的发展历程。力求对该仪器技术有一个较清楚的认识,并对今后相关的研究工作提供建设性帮助。 1.飞行时间质谱的工作原理:TOF-MS分析方法的原理非常简单。这种质谱仪的 质量分析器是一个离子漂移管。样品在离子源中离子化后即被电场加速,由离子源产生的离子加速后进入无场漂移管,并以恒定速度飞向离子接收器,假设离子在电场方向上初始位移和初速度都为零,所带电荷数为q,质量数为m, 加速电场的电势差为V, 则加速后其动能应为: m v2 / 2= qe V 其中,v 为离子在电场方向上的速度。 离子以此速度穿过负极板上的栅条,飞向检测器。离子从负极板到达检测器的飞行时间t,就是TOFMS 进行质量分析的判据。在传统的线性TOFMS,离子沿直线飞行到达检测器;而在反射型TOFMS 中,离子经过多电极组成的反射器后反向飞行到达检测器,后者在分辨率方面优于前者。 2.飞行时间质谱的发展: 由于存在初始能量分散的问题,提高飞行时间质谱分辨率一直是研究者和仪器制造上努力的目标。仪器技术的进展也主要围绕这一目标进行。 2.1离子化技术的发展:最初TOFMS采用电子轰击的方法进行离子化。由电子枪产生的电子电离样品分子使其离解为离子,经加速形成离子束进入飞行区。这种方法可用于气、固、液体样品的分析。其缺点是:1)离子化时间较长,和一般离子的飞行时间数量级相近,容易引起大的误差;2)电子的电离及其进样方式,难以进行大分子样品的分析。目前这种离子化方式多用于小分子的分析。而新的电子发生方式如激光电子枪开始出现。后来脉冲离子发生器应用逐步广泛。用于固体或液体样品的重离子轰击、等离子体解吸(PDMS)及二次离子质谱(SIMS)属于此列。目前脉冲激光技术应用最广,包括激光解吸(LD)、共振激光离子化(RI)、共振加强单多光子离子化(RES/MPI)以及生化分析中常用的基质辅助激光解吸[4] (MALDI))等,适用于不同样品的分析。例如共振激光离子化可用于痕量金属元素的分析[3]。REMPI 则擅长复杂有机物的选择性离子化;MALDI的优点在于:1)可获得高的灵敏度,甚至能检测到离子化区的几个原子;2)对于热不稳定的生物大分子可实现无碎片离子化;3)对固体、液体表面分析,可以很好地控制离子化的位置或深度样品,分析时间大大缩短;4)可以与不同的离子化方式相结合。为解决多肽、蛋白、寡糖、DNA测序等生命科学领域中的前沿分析课题,需要发展特殊电离技术以及超高分辨、高灵敏度、大质量范围、多级串联的高档
This analyser is commonly called the TOF. The TOF is used in single MS systems, with an LC introduction, with a GC introduction, or with MALDI ionisation. In MS/MS configuration, the TOF is associated to a quadrupole (QTof), or to another TOF (TOF-TOF) or to an Ion Trap (QIT/TOF). Principle of the time of flight analyser:In a Time–Of–Flight (TOF) mass spectrometer, ions formed in an ion source are extracted and accelerated to a high velocity by an electric field into an analyser consisting of a long straight ‘drift tube’. The ions pass along the tube until they reach a detector. After the initial acceleration phase, the velocity reached by an ion is inversely proportional to its mass (strictly, inversely proportional to the square root of its m/z value). Since the distance from the ion origin to the detector is fixed, the time taken for an ion to traverse the analyser in a straight line is inversely proportional to its velocity and hence proportional to its mass (strictly, proportional to the square root of its m/z value). Thus, each m/z value has its characteristic time–of–flight from the source to the detector. Time of Flight equations:The first step is acceleration through an electric field (E volts). With the usual nomenclature (m = mass, z = number of charges on an ion, e = the charge on an electron, v = the final velocity reached on acceleration), the kinetic energy (mv /2) of the ion is given by equation (1). mv /2 = z.e.E(1) Equation (2) follows by simple rearrangement. v = (2z.e.E/m)1/2(2) If the distance from the ion source to the detector is d, then the time (t) taken for an ion to traverse the drift tube is given by equation (3). t = d/v = d/(2z.e.E/m)1/2 = d.[(m/z)/(2e.E)] 1/2(3) In equation (3), d is fixed, E is held constant in the instrument and e is a universal constant. Thus, the flight time of an ion t is directly proportional to the square root of m/z (equation 4). t = (m/z) 1/2 x a constant(4) Equation (4) shows that an ion of m/z 100 will take twice as long to reach the detector as an ion of m/z 25: going through the reflectron, the dispersion of ions of the same m/z value is minimized, leading to a great improvement of resolution
iTOFMS-1G/2G宣传稿 全二维气相色谱-飞行时间质谱联用仪GCxGC –TOFMS(iTOFMS-2G) 快速气相色谱-飞行时间质谱联用仪 Fast GC-TOFMS(iTOFMS-1G) 厦门质谱仪器仪表有限公司 2014年5月1日
一、介绍 厦门质谱仪器仪表有限公司(简称厦门质谱公司)传承了厦门大学三十余年质谱技术的研究经验与成果,曾研发成功国内首台高分辨率电喷雾离子源飞行时间质谱仪,是国内一家专注于飞行时间质谱器技术研发与生产的新兴企业。 iTOFMS-G系列是中国首款具有完全自主产权的商品化小型台式气相色谱-飞行时间质谱联用仪。它具有高分辨、高灵敏度和高采集速度的优异功能,实现了与全二维气相色谱/快速气相色谱的完美对接。iTOFMS-G的诞生代表了国产质谱进军通用型高端质谱仪器迈出了重要一步。 ●全二维气相色谱-飞行时间质谱联用技术(Comprehensive Two-dimensional Gas Chromatography-Time of Flight Mass Spectrometry, GCxGC TOFMS)是近十年以来,国际上发展最迅猛的色质联用技术之一,是色谱-质谱联用技术发展的一个最新趋势。相比于常规气质联用具有高通量、高分离度和高灵敏度等显著优势,是解决复杂体系中全组分和痕量组分分析的最佳方案,逐渐成为石油化工、香精香料、烟草酒业、食品安全、环境监测和中药鉴定等领域的必备分析仪器。 图1 GCxGC-TOFMS(iTOFMS-2G)的实物外观图 ●快速气相色谱-飞行时间质谱联用技术(Fast Gas Chromatography-Time of Flight
4.6 飞行时间计数器 飞行时间计数器置于主漂移室和晶体量能器之间(见图 4.6-1),桶部TOF 的接收度为0.83,端盖TOF 的接收度从0.85到0.95,基本覆盖了主漂移室和量能器的接收度。飞行时间计数器用来测量带电粒子在主漂移室内的飞行时间,主要功能是通过所测量的飞行时间信息,结合主漂移室测得粒子的动量和径迹,从而辨别粒子的种类;同时它也参加第一级触发判选;而且可以利用不同探测器输出信号之间的时间关系来排除宇宙线本底。 飞行时间计数器主要物理目标是粒子鉴别,其能力大小主要由相同动量粒子的飞行时间差和飞行时间计数器的时间分辨率所决定。飞行时间差随飞行时间计数器的内半径的变大而增加;时间分辨率分别由正负电子对撞的起始时间推算精度和粒子打到飞行时间计数器后测量的截止时间的精度决定,其中飞行时间计数器的本征时间分辨率是主要因素。 4.6.1 TOF 时间分辨率分析 每层TOF 的时间分辨率受多种因素影响,总的时间分辨率可表示为: 22exp 2222 2walk time ect s electronic position Z length bunch time bunch TOF ----++++++=σσσσσσσσ图4.6-1 BESIII 总体框图。桶部和端盖TOF 都是置于主漂移室和量能器之间,前者将固定于主漂移室上,后者固定到端盖量能器上。
1) TOF σ, TOF 本征时间分辨。 TOF 本征时间分辨与闪烁体和光电倍增管的性能、参数直接相关,如下面的公式所示[1]: 其中,scin τ是闪烁体的衰减时间,L 是击中位置到光电倍增管的距离, PMT τ是光电倍增管中光电子的渡越时间涨落,pe N 是光电子数。 pe N 与闪烁体的光产额、 厚度、衰减长度、光传输距离和光电倍增管的量子效率都有关: 其中,λ是光波长, )(0λN 是单位厚度闪烁体的光产额, t L 是粒子穿过闪烁体的厚度,a L 闪烁体的衰减长度, )(λε是光电倍增管的量子效率函数。根据我们和BELLE 的经验,我们希望单层TOF 的本征时间分辨率达到80ps (参见后面4.6.4 and 4.6.5)。 2) time bunch -σ, 束团时间不确定性。 束团时间的不确定性与加速器储存环中的高频时钟和稳相精度有关。根据BEPCII 的设计指标,其高频时钟周期为2ns ,稳相精度为1°,所以本征的束团时间误差为5ps 。考虑到在读出过程中,时钟信号传输和寄存等会造成时间晃动,我们希望这项误差达到20ps 以内。 3) length bunch -σ, 束团长度形成的对撞时刻的不确定性。 正负电子两个束团都有一定长度,这样它们相撞的准确时刻无法知道。根据BEPCII 的设计指标,束团长度为1.5cm ,即50ps 。两束团相撞可以简化考虑为一个静止、一个运动,相撞发生的几率是两个束团密度的乘积。这样,如果考虑两个束团密度都按高斯分布,其标准偏差将不确定性减少2倍,即 35ps 。 4) position Z -σ, 来源于粒子击中闪烁体的Z 向定位的不确定性。 在测量飞行时间时,闪烁体中的光传输时间必须要扣除。其精度取决于由MDC 径迹重建外推的闪烁体的Z 向定位。根据模拟,其精度为几个毫米,考虑到闪烁体折射率为1.5, 这项误差约为25ps 。 5) s electronic σ, 来源于电子学时间测量。 TOF 电子学时间测量将使用CERN HPTDC ,其设计指标为25ps 。 6) ect exp σ, 来源于预期飞行时间不确定性。 pe PMT scin TOF N c L n n ?? ????????+??????-+=2 2 222)1()35.21(ττσ?-∝λ λελd e L N N a L L t pe )()(/0
飞行时间的计算方法 飞行物体时间计算公式:到达地的到达时间=起飞地起飞时间+飞行时间±时区差 1.若一架飞机地某地(30°N,116°E)于当地时间2011年3月14日14时 起飞向东飞行,经过10小时到达加拿大的温哥华(西五区),当地时间是() A.3月8日1时B.3月8日11时C.3月7日1时D.3月9日10时 2.一架飞机从圣彼得堡(60°N,30°E)起飞,和西南经过11小时飞到古巴首都哈瓦那(西五区)。起飞时圣彼得堡时间为18日15时。飞机到达哈瓦那时,当地时间是() A.19日12时 B.19日19时 C.18日12时D.18日19时 2007年8月24日希腊发生特大森林大火,被列为近15年来世界上最严重的森林火灾之一。读下图回答第3答 3.8月25日一架救火飞机从图中的C地(112°E,0°)日出时刻起飞到图中的A地降落,飞行员始终看见太阳在地平绒上,若此日北京(40N)昼长为13小时,则飞机的飞行时间为()A.5小时B.5.5小时C.6小时D.6.5小时 4.飞机北京时间4月5日傍晚6时从上海直飞纽约(西五区),于下午4时到达,该飞机飞行了()A.10小时B.11小时C.12小时D.13小时 读“北半球经纬网示意图”,有一飞机①于下午2时,以地球自转角速度,从甲向乙飞行2小时45分钟后,正好在乙地看到日落,据此回答5~7题。 5.甲、乙两地的经度差约为() A.40° B.41° C.45° D.50° 6.飞机①上的旅客经历的昼长是() A.16小时45分钟 B.13小时 C.15小时 D.12小时15分钟 7.飞机②同时以同样的速度从甲向丁飞行3小时30分钟正好到达丁, 则下列有可能的是() A.飞机②于丁地日落1小时后抵达 B.飞机②上的旅客经历的昼长比飞机①上的长 C.飞机②在丁地日落时正好抵达
河南师范大学 光 谱 分 析 论 文 专业:新联物理 年级:2011级 学号:11020274003 姓名:王冉
飞行时间质谱仪 质谱仪(Mass spectrometry)是对电离的原子、分子以及分子的碎片进行测量。质谱仪有磁式、四电极的与飞行时间的等多种类型。按照带电粒子在磁场或电场中的飘移,或他们移动能量来确定它们的荷质比。 在激光质谱检测中最常用的是四级质谱仪与飞行时间质谱仪Time of Flight Mass Spectrometer (TOF),尤其是飞行时间质谱仪。飞行时间质谱仪是一种很常用的质谱仪。这种质谱仪的质量分析器是一个离子漂移管。由离子源产生的离子加速后进入无场漂移管,并以恒定速度飞向离子接收器。离子质量越大,到达接收器所用时间越长,离子质量越小,到达接收器所用时间越短,根据这一原理,可以把不同质量的离子按m/z值大小进行分离。 飞行时间质谱仪发展史:1948年A1E1Cameron和D1F1Eggers研制出世界上第一台飞行时间质谱仪实验样机,其直线飞行管长达10m,分辨率却不到5。初期由于质量分辨本领很低,很长时间未得到推广应用,但研究工作一直持续不断。值得注意的进展是1955年W1C1Wiley和I1H1Mclaren从理论上探讨限制TOFMS分辨率的两个主要因素,即初始空间分散和初始能量分散,并通过新型离子枪,双场加速和延迟引出的方法,将直线式飞行时间质谱仪的分辨率提高到300。但此后的20年,TOFMS的发展一直处于低谷,其分辨率在几百之内。直到1973年B1A1Marmylin引入静电反射器制成反射式飞行时间质谱仪,用离子
飞行高度与速度的测量仪表 一、高度表 (一)飞行高度的意义与测量方法 行离度与速度的测量仪表飞机的飞行高度是指飞机在空中的位置与基准面之间的垂直距离。根据所选基准面的不同,飞行中使用有如下几种定义的高度:相对高度、真实高度和绝对高度。 测量飞机的飞行高度均采用间接方法。就是通过测量与高度有单值函数关系,又便于准确测量的另一物理量,而间接得到高度的数值。根据所选用的物理量及对物理测量的方法不同,形成了不同的高度测量装置。目前在飞机上用得比较多的是气压式高度表和无线电高度表。 (二)气压式高度表的工作原理 根据大气层的组成及特点,我们知道空气的静压力Ps在地面上最大,随着高度增加呈指熟规律减小。通过测量气压Ps,间接测量高度, 就是气压式高度表的工作原理,这种高度表实质上是测量绝对压力的压力表。右图是气压式高度表的简单原理及表面图。 如图所示,将离度表壳密封,空气压力Ps由传压管送入高度表内腔。高度增加表内压力减小,置于表壳内的真空膜盒(内腔抽真空后密封)随之膨胀而产生变形,膜盒中心的位移经传动机构传送,变换和放大后,带动指针沿刻度面移动,指示出与气压Ps相对应的高度数值。在表面图上,窗口内的示数是基准面的气压值,通过调整旋钮调节。测量标准气压高度时,窗口内的示值应为760;当测量相对高度时,其示数是机场地面的气压值。 (三)无线电高度表
无线电高度表是利用无线电波反射的原理工作的。飞机上装有无线电台发射机、及发射接收天线。测量时,发射机经发射天线同时向地面和接收机发射同一无线电波,接收机将先后接收到由发射机直接来的电波和经地面反射后的回波,两束电波存在有时间差。如果电波在传送过程中没有受到干扰,时间差正比于被测的高度。测量出时间差,高度 也就知道了。图8.11无线电波反射示意图和无线电产高度表表面图。 目前使用的无线电高度表有调频式和脉冲式两种类型。前者发射机发射的是调频式无线电波,电波的频率随时间周期性地变化,因此接收机所接收的两束电波时间差,直接转换成信号的频率差,测量频率差,即可得到真实高度。而后者发射机发射的是离散脉冲,需要测量发射脉冲与反射脉冲之间的时间差。 在高度小于1000米的情况下,无线电高度表的准确度优于气压式高度表,因此,在飞机起飞、进场着陆阶段,大部采用无线电高度测量飞机的离地高度。新设计的无线电高度表除指示被测高度外,还具有警戒高度的报警信号(声、光报警)和故障警告旗。图8.11表面图中右下方的旋钮为警戒高度调整,驾驶员调定警戒高度后,当飞机在此高度附近时,高度表将发出报警信号,提醒驾驶员注意。当高度表测量系统产生故障时高度表警告旗即出现。
摘要 脉冲飞行时间测量法是脉冲激光测距的关键技术,它广泛运用于激光测距。脉冲激光测距是通过测量激光脉冲发射信号(主波)和接收信号(回波)之间的时间间隔,就可以得知空间物体的距离。主波和回波被光电探测器接收,再放大整形后,通过门电路,开启和关闭计数器,计数器对基准脉冲计数,计得的脉冲数目就代表所要测的飞行时间。脉冲飞行时间的测量关键在于对回波信号的正确处理,其时间测量技术主要在于:采用时刻鉴别法判定计时点,时间间隔测量法测量主波和回波的时间间隔,模数转换技术提高测量精度、减小计时误差。本文设计的时间测量电路由光电探测电路、放大电路、阈值电路、门电路、LED显示电路、单片机主控制电路构成。各模块电路采用集成芯片,LED动态扫描显示,测时精度为1us。 关键词:单片机;脉冲激光测距;脉冲飞行时间;计数器;LED动态扫描
ABSTRACT Pulse flight time measurement method was the key technique that the pulse laser measured the distance, which was made use of in laser to measure to be apart from extensively. The pulse laser measuring the distance that passed to measure time interval between transmiting (main wave) and then receiving (reflection) , so the distance of the space object could be known. Both of main wave and reflecting wave were received by the photoelectric detector, then passed an electric circuit after enlarging again orthopedics to open and close to a count-machine , and a count-machine to count to the basis pulse, which was accounted of the pulse number which was the flight time. The key of the flight time measurement was the right processing of the reflecting wave, and its time measurement technique mainly lay in:Adopting time distinguishing judged to time point, time interval measurement measure between main wave and reflecting wave's interval, analog signals and digital signals conversion technique improved measuring accuracy and reduced the error of the measuring time. Time measurement circuit include the the photoelectric detecting circuit,enlarging circuit, the doorsill circuit,Logic circuit,LED circuit,Microcontroller active control circuit.Each mold circuit adopted integration chip, and the LED dynamic scan and manifestation, while measuring accuracy is 1us. Keyword:Microcontroller;The pulse laser measuring distance;the pulse flight time; the count-machine; the LED dynamic scan
河南师大学 光 谱 分 析 论 文
专业:新联物理 年级:2011级 学号:11020274003 :王冉 飞行时间质谱仪 质谱仪(Mass spectrometry)是对电离的原子、分子以及分子的碎片进行测量。质谱仪有磁式、四电极的与飞行时间的等多种类型。按照带电粒子在磁场或电场中的飘移,或他们移动能量来确定它们的荷质比。 在激光质谱检测中最常用的是四级质谱仪与飞行时间质谱仪Time of Flight Mass Spectrometer (TOF),尤其是飞行时间质谱仪。飞行时间质谱仪是一种很常用的质谱仪。这种质谱仪的质量分析器是一个离子漂移管。由离子源产生的离子加速后进入无场漂移管,并以恒定速度飞向离子接收器。离子质量越大,到达接收器所用时间越长,离子质量越小,到达接收器所用时间越短,根据这一原理,可以把不同质量的离子按m/z值大小进行分离。
飞行时间质谱仪发展史:1948年A1E1Cameron和D1F1Eggers 研制出世界上第一台飞行时间质谱仪实验样机,其直线飞行管长达10m,分辨率却不到5。初期由于质量分辨本领很低,很长时间未得到推广应用,但研究工作一直持续不断。值得注意的进展是1955年W1C1Wiley和I1H1Mclaren从理论上探讨限制TOFMS分辨率的两个主要因素,即初始空间分散和初始能量分散,并通过新型离子枪,双场加速和延迟引出的方法,将直线式飞行时间质谱仪的分辨率提高到300。但此后的20年,TOFMS的发展一直处于低谷,其分辨率在几百之。直到1973年B1A1Marmylin引入静电反射器制成反射式飞行时间质谱仪,用离子反射器抵消同一质荷比不同初始能量的离子飞行时间的分散,使得TOFMS的分辨率有较大突破达到3000。另一项重要的革新则是1987年发明的垂直引入技术,不仅提高离子传输效率还为各种离子源与飞行时间分析器相联提供一个通用接口。此后伴随着快电子技术、大面积检测器技术、计算机技术和机械加工工艺的不断进步,TOFMS的性能也不断提高。1998年A1F1Dodonov等设计一台垂直引入反射式TOFMS,其质量分辨率达到20000以上。该技术的出现使TOFMS进 入一个前所未有的快速发展阶段。 在飞行时间质谱仪里,以往多采用单场推斥脉冲,但现在多采用双推斥脉冲。采用双推斥脉冲可以保证不增加离子的空间分散和能量分散,这对提高仪器的分辨率非常重要。使用正负双推斥脉冲就相当于把原有的脉冲峰峰值增加了一倍,可以克服传统的单脉冲在提高脉冲
等待航线简介及飞行方法 SINO-DLH-0720整理 参考资料:《商用飞行员教程》 《ROD地面飞行学校》 中国模拟飞行学院内部教学资料,未经允许谢绝转载
等待航线 等待航线简介: 在飞行当中经常听到管制员给这样的指令“XX机组在XXX航点加入标准等待程序”,随后会看到机组在某个地方开始沿着类似跑道形状的轨迹飞行,这就是我 们所谓的等待航线,如下图(图1)所示。其中的两条直线分别称作“入航(inbound)”和“出航(outbound)”。 (图1) 当然这个圈不是随便想怎么转就怎么转,往哪个方向转,转一圈的时间是多少,以怎样的方式进入等待程序都有严格的规定,也就是说我们要按照标准等待航线的程序来执行。标准等待航线是一种沿直角航线的机动飞行。标准等待航线采用右转弯,等待定位点可以是导航台上空或者交叉定位点(如航点),其转弯使用 的坡度为25°或标准转弯率3°/s对应的坡度,以所需坡度小者为准。非标准等待航线改为左转弯,其他程序相同。 等待航线的航段长度也根据飞机的地速和高度的不同而不同。静风条件下,等待高度在14000ft(4250m)或以下时,出航边的飞行时间为1min;等待高度高于14000ft(4250m)时,出航边的飞行时间为1.5min。也就是说,如果飞机的地速
为120kt并且在4000m的高度做等待,那么等待航线出航边的长度约为2海里。当然在实际飞行当中也有可能出现偏差,比如说对于一个出航边为1分钟的等待航线,在入航边只飞了45秒而不是1分钟,那么修正的方法就是缩短入航边时间延长出航边时间15秒。如果在等待航线上有侧风的话还需要进行侧风修正,修正侧风影响的方法是:在入航边时判断偏流以便保持入航航迹,确定偏流后应使用3倍偏流的航向修正量在此出航边上进行侧风修正。如果不进行侧风修正很容易因为侧风影响而使飞机从新转回入航边时很难切入向台航向道。图2中左图为修正量不足的航迹,右图为正确使用3倍修正量的航迹 (图3) 当飞机速度不同的时候等待航线的范围也不同,表速越大等待航线的范围也就越大,图4所示的是根据不同的高度对应的最大等待速度(速度为指示空速)。但是在实际飞行过程中通常会小于规定的最大速度飞行。如果飞机的表速大于最大等待速度,管制员将要求飞机在到达预定等待定位点前3分钟减速。