一种新型角度传感器的设计
王 晔,张忠波,唐胜武
(中国电子科技集团公司第四十九研究所,黑龙江哈尔滨150001)
摘 要:提出了一种采用线阵CC D器件实现小角度测量的设计方案,该方案利用自准直原理进行测量,可以有效地降低测量误差。阐述了自准直测量原理,给出了硬件设计,并采用复杂可编程逻辑器件(CP LD)驱动和检测CC D信号。同时,综合考虑到量程大和测量误差小的具体要求,利用光学拼接的方法满足了设计要求。
关键词:线阵CC D;角度传感器;自准直仪;复杂可编程逻辑器件
中图分类号:TP212 文献标识码:A 文章编号:1000-9787(2005)01-0045-03
Design of ne w type angle sensor
W ANG Y e,ZH ANG Zhong2bo,T ANG Sheng2wu
(The49th R esearch I nstitute of China E lectronics T echnology G roup Corporation,H arbin150001,China)
Abstract:A design scheme measuring little angle with linear CC D is presented.The autocollimated measurement scheme can prove accuracy effectively.The autocollimated measurement principle is discussed,and hardware design is given.
C om plexity programmable logic device(CP LD)is used to drive and detect the CC
D signal.And the concrete needs for small measurement error and large scale are considered.And a demand of design is met by utilizing optics connection. K ey w ords:linear CC D;angle sens or;autocollimated instrument;CP LD(com plexity programmable logic device)
0 引 言
自准直测角技术在实现小角度的多维、非接触测量中具有独特的优点[1],被广泛用于光学元件的角度测量、平台平面测量、机械轴系的晃动及精密导轨的直线度检测等精密测量中。通常,自准直仪使用机械机构实现对光斑回像的跟踪,存在着跟踪频响及测角精度低的缺点。采用电荷耦合器件(CC D)可以从原理上取消机械机构对光斑回像的跟踪,利用CC D器件的像元自扫描能力测量自准直光斑回像的位置,使跟踪和测量一次完成,并具有较高的测角频响和准确度。
本文提出了一种基于自准直原理采用线阵CC D器件作为检测元件,实现小角度、非接触测量的全新方案,给出了测量原理及传感器硬件设计,该传感器使用单片机系统实现数据的采集、处理及传输,采用RS232串行通信接口实时传输到计算机。
1 测量原理
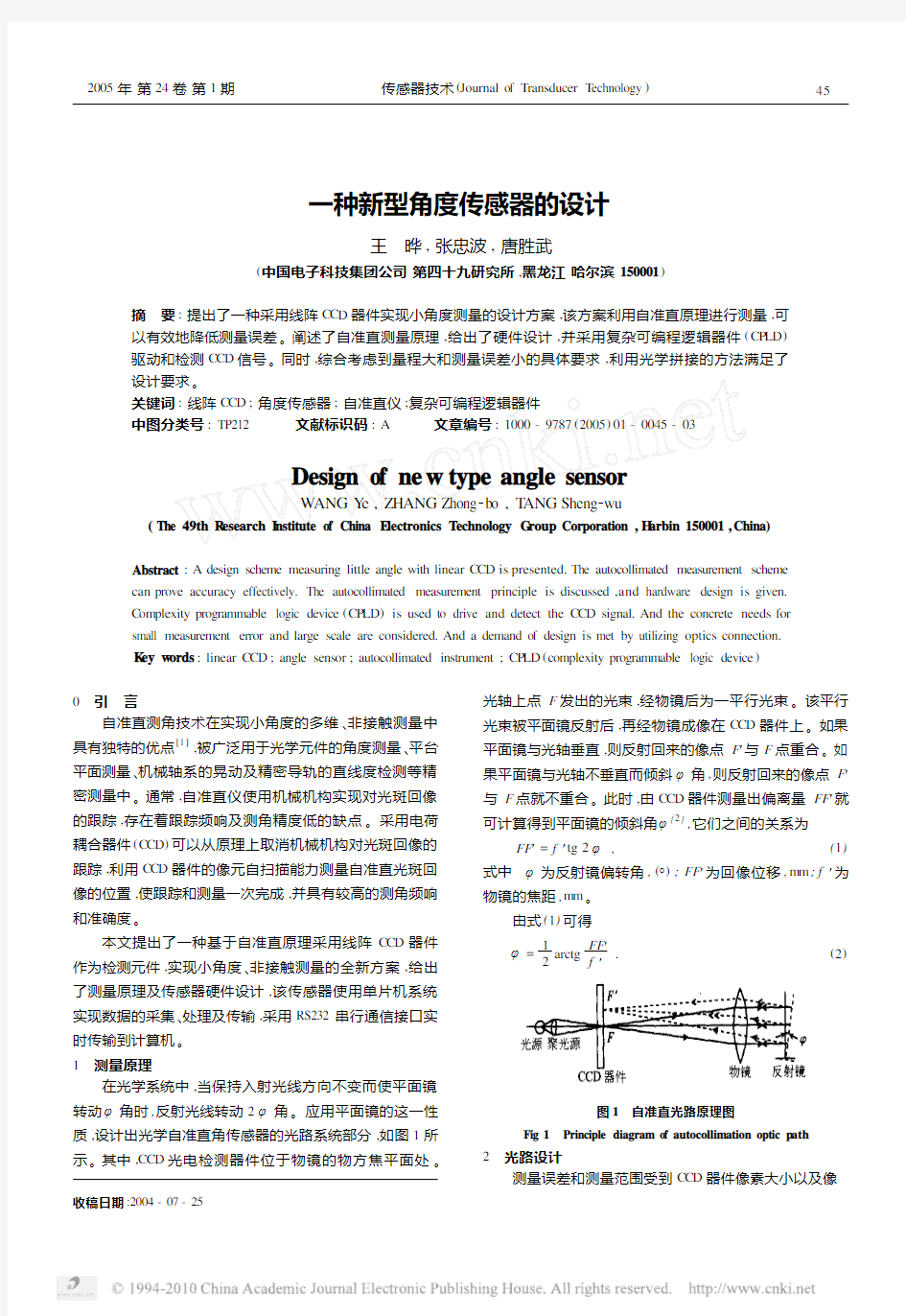
在光学系统中,当保持入射光线方向不变而使平面镜转动φ角时,反射光线转动2φ角。应用平面镜的这一性质,设计出光学自准直角传感器的光路系统部分,如图1所示。其中,CC D光电检测器件位于物镜的物方焦平面处。
收稿日期:2004-07-25光轴上点F发出的光束,经物镜后为一平行光束。该平行光束被平面镜反射后,再经物镜成像在CC D器件上。如果平面镜与光轴垂直,则反射回来的像点F′与F点重合。如果平面镜与光轴不垂直而倾斜φ角,则反射回来的像点F′与F点就不重合。此时,由CC D器件测量出偏离量FF′就可计算得到平面镜的倾斜角φ[2],它们之间的关系为FF′=f′tg2φ,(1)式中 φ为反射镜偏转角,(°);FF′为回像位移,mm;f′为物镜的焦距,mm。
由式(1)可得
φ=1
2
arctg FF
′
f′
.(2
)
图1 自准直光路原理图
Fig1 Principle diagram of autocollim ation optic p ath
2 光路设计
测量误差和测量范围受到CC D器件像素大小以及像
54
2005年第24卷第1期 传感器技术(Journal of T ransducer T echnology)
素数目的限制,根据本项目的具体要求,必须采用两片CC D 拼接起来应用。CC D 的拼接方法有很多,如,机械拼接法、光学拼接法等。
采用单体线阵CC D 在测量显微镜下将其首尾相拼在一起,叫做CC D 的机械拼接。这种方法工艺简单,容易实现。但是,由于线阵CC D 器件的两端各有若干个用以建立黑、白电平的过渡像素而设置的虚设单元,另外,还有其他电路、引线和封装结构,使得机械拼接不可能使2个线阵
CC D 有效像元首尾完全搭接,总是存在一定的间距。而且,
不容易拼接在同一平面内的同一直线上。
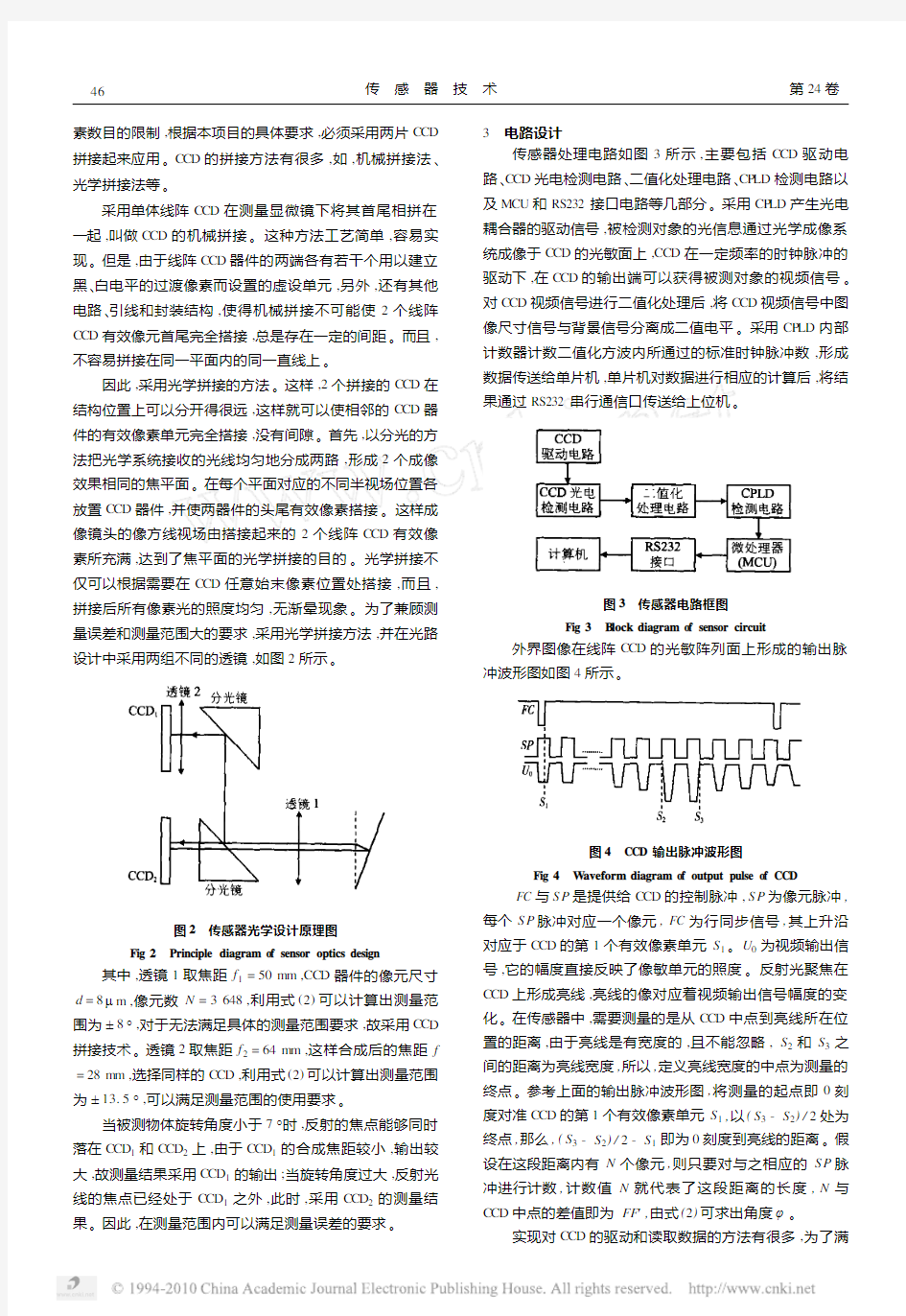
因此,采用光学拼接的方法。这样,2个拼接的CC D 在结构位置上可以分开得很远,这样就可以使相邻的CC D 器件的有效像素单元完全搭接,没有间隙。首先,以分光的方法把光学系统接收的光线均匀地分成两路,形成2个成像效果相同的焦平面。在每个平面对应的不同半视场位置各放置CC D 器件,并使两器件的头尾有效像素搭接。这样成像镜头的像方线视场由搭接起来的2个线阵CC D 有效像素所充满,达到了焦平面的光学拼接的目的。光学拼接不仅可以根据需要在CC D 任意始末像素位置处搭接,而且,拼接后所有像素光的照度均匀,无渐晕现象。为了兼顾测量误差和测量范围大的要求,采用光学拼接方法,并在光路设计中采用两组不同的透镜,如图2所示
。
图2 传感器光学设计原理图
Fig 2 Principle diagram of sensor optics design
其中,透镜1取焦距f 1=50mm ,CC D 器件的像元尺寸
d =8μm ,像元数N =3648,利用式(2)可以计算出测量范
围为±8°,对于无法满足具体的测量范围要求,故采用CC D 拼接技术。透镜2取焦距f 2=64mm ,这样合成后的焦距f
=28mm ,选择同样的CC D ,利用式(2)可以计算出测量范围
为±13.5°,可以满足测量范围的使用要求。
当被测物体旋转角度小于7°时,反射的焦点能够同时落在CC D 1和CC D 2上,由于CC D 1的合成焦距较小,输出较大,故测量结果采用CC D 1的输出;当旋转角度过大,反射光线的焦点已经处于CC D 1之外,此时,采用CC D 2的测量结果。因此,在测量范围内可以满足测量误差的要求。
3 电路设计
传感器处理电路如图3所示,主要包括CC D 驱动电路、CC D 光电检测电路、二值化处理电路、CP LD 检测电路以及MC U 和RS232接口电路等几部分。采用CP LD 产生光电耦合器的驱动信号,被检测对象的光信息通过光学成像系统成像于CC D 的光敏面上,CC D 在一定频率的时钟脉冲的驱动下,在CC D 的输出端可以获得被测对象的视频信号。对CC D 视频信号进行二值化处理后,将CC D 视频信号中图像尺寸信号与背景信号分离成二值电平。采用CP LD 内部计数器计数二值化方波内所通过的标准时钟脉冲数,形成数据传送给单片机,单片机对数据进行相应的计算后,将结果通过
RS232串行通信口传送给上位机。
图3 传感器电路框图
Fig 3 B lock diagram of sensor circuit
外界图像在线阵CC D 的光敏阵列面上形成的输出脉
冲波形图如图4所示。
图4 CCD 输出脉冲波形图
Fig 4 W aveform diagram of output pulse of CCD
FC 与S P 是提供给CC D 的控制脉冲,S P 为像元脉冲,
每个S P 脉冲对应一个像元,FC 为行同步信号,其上升沿对应于CC D 的第1个有效像素单元S 1。U 0为视频输出信号,它的幅度直接反映了像敏单元的照度。反射光聚焦在
CC D 上形成亮线,亮线的像对应着视频输出信号幅度的变
化。在传感器中,需要测量的是从CC D 中点到亮线所在位置的距离,由于亮线是有宽度的,且不能忽略,S 2和S 3之间的距离为亮线宽度,所以,定义亮线宽度的中点为测量的终点。参考上面的输出脉冲波形图,将测量的起点即0刻度对准CC D 的第1个有效像素单元S 1,以(S 3-S 2)/2处为终点,那么,(S 3-S 2)/2-S 1即为0刻度到亮线的距离。假设在这段距离内有N 个像元,则只要对与之相应的S P 脉冲进行计数,计数值N 就代表了这段距离的长度,N 与
CC D 中点的差值即为FF ′,由式(2)可求出角度φ。
实现对CC D 的驱动和读取数据的方法有很多,为了满
64 传 感 器 技 术 第24卷
足传感器的小型化及工作速度的要求,最好采用硬件实现逻辑功能,CP LD 具有设计、修改灵活以及集成化程度高、工作速度快等特点,因此,采用CP LD 完成驱动的功能,然后,将测量得到的CC D 器件的二值化视频信号用CP LD 进行数字化处理,转换成14位的二进制数字信号,提供给MC U 进行处理。CP LD 电路原理框图如图5
所示
图5 CP LD 电路原理框图
Fig 5 B lock diagram of CP LD circuit
由图5可以看出:CP LD 采用了双计数器结构。CP LD 将高频同步脉冲S P 和行同步脉冲FC 传给计数器1和计数器2,同时,CC D 将视频有效信号U 0传给控制器。控制器起到选择计数器、控制计数器启动与停止及控制锁存器输出的作用。计数器1是从0刻度计数到亮线的前边缘,计数器2是对亮线的宽度进行计数,然后,将计数器2的计数值减半和计数器1的计数值相加,得到最后的准确值。
4 测量结果
CC D 作为图像传感器使用时,为了保证图像的细节,必
须确定分辨力。根据采样定理的要求,采样频率应高于图像的最高频率的2倍[3]。所以,必须根据所求得的采样尺寸选择CC D 器件,此外,还要确保图像的亮度值应处于
CC D 光电转换特性允许的动态范围之内,以保证转换后图
像信息不失真。选用T C D1300D 二相线阵CC D ,它的片内加有一个片内驱动器和采样保持器,保证了输出信号的幅度直接反映了像敏单元的照度。T C D1300D 有3648个像素单元,像元长为8μm 、高为8μm ,中心距亦为8μm ,像元总长为29.184mm 。如果选用焦距为28mm 的透镜,根据式(2)进行计算,偏转角φ的测量结果如表1所示。
表1 测量结果
T ab 1 T esting result
测量点序号φ理论值φ测量值
绝对误差
110′10.68′0.68′220′20.44′0.44′330′30.63′0.63′440′40.57′0.57′550′50.60′0.60′61° 1.031°0.031°74° 4.022°0.022°8
7°7.029°0.029°910°10.028°0.028°10
13°
13.025°
0.025°
5 结束语
本文提出的采用线阵CC D 器件测量角度的方案可行,以线阵CC D 器件为光电变换元件取代传统的光电机械跟踪瞄准机构,利用其自扫描能力实现对光斑回像的跟踪和测量一次完成,且采用CP LD 进行处理,电路简单、速度快、成本低,所设计的自准直角传感器具有较小的测量误差。参考文献:
[1] 蔡淑章,景芳盛.光电自准直仪及其应用[M].北京:中国计量
出版社,1986.15-28.
[2] 王庆有.CCD 应用技术[M].天津:天津大学出版社,2000.151
-152.
[3] 段凤增.信号检测理论[M].哈尔滨:哈尔滨工业大学出版社,
2002.173-180.
[4] 丛 红,董爱梅,王辉林,等.CC D 显微摄像法测量孔心距[J ].
传感器技术,2003,22(7):68-70.
作者简介:
王 晔(1971-),女,黑龙江哈尔滨人,中国电子科技集团公司第四十九研究所工程师,从事智能化传感器研究工作。
(上接第44页)
参考文献:
[1] M ass obrio G,M artinoia S.M odelling the ISFET behaviour under tem 2
perature variations using BIOSPICE [J ].E lectronics Letters ,1996,32(10):936-938.
[2] 牛蒙年,丁辛芳,童勤义.S i 3N 4绝缘栅中两种表面基对pH 2IS 2
FET 器件敏感特性的影响[J ].半导体学报,1996,17(3):522-528.
[3] 施 敏.半导体器件物理与工艺(第二版)[M].苏州:苏州大
学出版社,2002.180-186.
[4] 毕查德?拉扎维.模拟C M OS 集成电路设计[M].西安:西安交
通大学出版社,2002.24-27.
[5] K uhnh old R ,Rysse H.M odeling the pH response of silicon nitride IS 2
FET devices[J ].S ens ors and Actuators B ,1999,68(1Z A -2):307-312.
[6] Palan B ,Santos F V ,K aram J M.New ISFET sens or interface circuit
for biomedical applications[J ].Sens ors and Actuators B ,1999,57(1-3):63-68.
[7] Bausell J ,Carrabina J ,Errachid A.I on 2sensitive field 2effect transis 2
tors fabricated in a com 2mercial C M OS technology [J ].Sens ors and Actuators B ,1999,57(1-3):56-62.
作者简介:
杨 振(1979-),男,山东新泰人,硕士研究生;从事C M OS 集成电路及传感器集成化研究。
74第1期 王 晔等:一种新型角度传感器的设计
传感器的应用实例 学习目标: 1、知道传感器应用的一般模式. 2、理解电子秤的原理----力传感器的应用. 3、理解话筒的原理----声传感器的应用. 4、理解电熨斗的原理----温度传感器的应用. 5、会设计简单的有关传感器应用的控制电路. 自主学习: 一、力传感器的应用-----电子秤 1.电子秤理有______片、电压放大器、模数转换器微处理器和数字显示器等器件.电阻应变片受到力的作用时,它的____会发生变化,把应变片放在合适的电路中,他能够把物体____这个力学量转换为____这个电学量,因而电子秤是____的应用. 2.工作原理:如图6-2-1所示,弹簧钢制成的梁形元件右端固定,在梁的上下表面各贴一个应变片,在梁的自由端施力F,则梁发生弯曲,上表面拉伸,下表面压缩, 上表面应变片的 电阻___,下表面应变片的电阻变小.F越大, 弯曲形变___, 应变片的阻值变化就越大. 如果让应变片中通过的电流保持恒定,那末上面应变片两端的电压 变大, 下面应变片两端的电压变小. 传感器把这两个电压的差值输 出.外力越大, 输出的电压差值也就, ___ 6-2-1 二、声传感器的应用----话筒 1、话筒是一种常用的____,其作用是把____转换成____. 话筒分为____,____,____等几种. 2、电容式话筒:原理:是绝缘支架,薄金属膜和固定电极形成一个电容器,被直流电源充电.当声波使膜片振动时,电容发生变化,电路中形成变化的电流,于是电阻R两端就输出了与声音变化规律相同的电压. 3.驻极体话筒:它的特点是____,____,____,____.其工作原理同电容式话筒,只是其内部感受声波的是____. 三、温度传感器的应用-----电熨斗 1.在电熨斗中,装有双金属片温度传感器,其作用是____,当温度发生变化时, 双金属片的____不同,从而能控制电路的通断 2.电熨斗的自动控温原理: 常温下,上、下触点是接触的,但温度过高时,由于双金属片受热膨胀系数不同,上部金属膨胀____,下部金属膨胀___,则双金属片向下弯曲,使触点分离,从而切断电源,停止加热.温度降低后, 双金属片恢复原状,重新接通电源,从而保持温度不变. 典型例题: 例1 用如图6-2-2所示的装置可以测量汽车在水平路面上做匀加速直线运动的加速度.该装置是在矩形箱子的前、后壁上各安装一个有力敏电阻组成的压力传感器.用两根相同的轻弹簧夹着一个质量为2.0㎏的滑块,滑块可无摩擦滑动,两弹簧的另一端分别压在传感器a、b 上其压力大小可以直接从传感器的液晶显示屏上读出.现将装置沿运动方向固定在汽车上, 传感器b在前,a在后.汽车静止时, 传感器a、b的 示数均为10N(取g=10m/s2) 若传感器a示数为14N,b的示数为6.0N,求此时 汽车的加速度和方向?
一种霍尔电流传感器的电路设计 设计了一种零磁通型霍尔电流传感器,可广泛应用于交流变频驱动、焊接电源、开关电源、不间断电源等领域。该零磁通型霍尔电流传感器通过砷化镓霍尔元件检测由通电电流产生的磁场,继而有效地检测被测电流。 由于霍尔元件产生的霍尔电势很微弱,而且还存在较大的失调电压,因此对霍尔电压的放大和对不等位电势的补偿是该设计的两个主要需要解决的问题,而且霍尔元件中载流子浓度等随温度变化而变化,因此还需用温度补偿电路对其温度补偿。 1 系统设计框架 系统分为4个部分:1)霍尔元件的供电电路,由电压基准(电流基准)芯片为霍尔片提供工作电流; 2)霍尔元件及磁芯,将感应片感应的磁场(该磁场由通电电流产生)转化为霍尔电压;3)放大电路,将微弱的霍尔电压进行放大;4)反馈部分,利用了磁平衡原理:一次侧电流所产生的磁场,通过二次线圈电流进行补偿,使磁芯始终处于零磁通工作状态。其系统总流程图如图1所示。 2 系统硬件电路设计 系统由±5 V的稳压源供电。用一片电压基准芯片REF3012为砷化镓系列的霍尔元件HW300B提供基准电压。HW300B是一款可采用电压模式供电和电流模式供电的霍尔元件,HW300B放在开有气隙的集磁环的气隙里,并用胶水加以固定(霍尔元件和集磁环相对位置如果发生变化,会影响产生的霍尔电势的大小)。霍尔元件的输出接至仪器放大器AD620,作为放大器的差模出入端和共模输入端。放大器的增益可通过调节1、8引脚之间的10 kΩ的电位器改变。放大器的输出接反馈线圈,该反馈线圈绕在集磁环上,其绕线方向能使通过它的电流产生的磁场与集磁环收集到的磁场方向相反。反馈线圈末端放1个75 kΩ的精阻接地,可以通过测量精阻两端的电压,计算反馈线圈中的电流,进而推算穿过集磁环中心的被测电流的大小。其具体电路图如图2所示。 2.1 REF3012 以SOT23-3封装的REF3012是一个高精度、低功耗、低电压差电压参考系列芯片。REF3012小尺寸和低功耗(最大50μA)非常适用于便携式和电池供电。它不需要负载电容,但对任何容性负载很稳定。因磁敏型霍尔元件很容易受温度的影响,可以采用恒流源供电以减小其温度系数。在该系统设计中,REF3012的输入引脚1接+5 V电源,并接10μF的旁路电容至地,该旁路电容对电源进行滤波,提高电源稳定性。而其输出引脚2接到HW300B的引脚1,并且也接1O μF的旁路电容至地,GND(地)引脚3接地。由于系统设计要求REF3012为HW300B提供2.5 V的基准电压,根据REF3012的数据资料可知,当输入电压为5 V 时,输出电压为2.5 V,所以REF3012引脚1接+5 V电压。 2.2 霍尔元件 本设计采用砷化镓系列的HW300B型霍尔元件,输出霍尔电压范围122~204mV,输入、输出阻抗为240~550 Ω,补偿电压为-7~7 mV,温度系数为-1.8%/℃。其输入可采用电压模式供电,也可采用电流模式供电。这里采用电压模式供电,即就是HW300B的引脚1、3为控制输入端,而引脚2、4为霍尔电压输出端。 霍尔元件是将磁场转换为电信号的线性磁敏元件,霍尔输出电压 式中,S为乘积灵敏度,mV/(mT·mA);Ic为工作电流,mA;B为磁感应强度,mT。 本设计中,将霍尔元件放进开有气隙的集磁环的气隙里,并将霍尔元件和集磁环固定,这样可以感应出更大、更稳定的霍尔电势。式(1)中,当S与Ic一定,则Vh与B有直接线性关系。通电导体周围必然产生磁场,根据安培定律,电流与磁场的关系式∮BdI=μ0I0得:
泡沫液位传感器课程设计 摘要:泡沫是一种特殊的两相流形态,其力学、热学、光学等多种性能均与单相气体或液体有很大区别,由于泡沫的形成机理多样、性质变化复杂,至今尚无完善的研究理论体系,泡沫的液位测量在国内外也是一个空白,本文主要设计了一种液位控制器,它以8051作为控制器,通过8051单片机和模数转换器等硬件系统和软件设计方法,实现具有液位检测报警和控制双重功能,并对液位值进行显示,一种基于传热原理的测量泡沫液位的传感器,介绍了传感器的构造和原理,以及测量误差和动态响应的计算分析。 关键词:泡沫;液位检测;传感器;两相流; Abstract:The foam is a special phase com pared w ith liqu id and gas.It ha s m any dif f erent cha r acters in m ech anics,therm oties,photology and soon,For different methods to generate fo amsand its special mechanism,even today there have not created a perfect theory system to deal with foam mediums.Foam level meas urement is also nearly to be all unreachable field by now.A kind of foam level sensor based on thermoties theory has be endeveloped,Introduces its structure 、principle 、analyses error and dynam icresponse of sensor. Key Words : Foam ;Level Detecting ;Sensor;8051Single chip microcomputer;
光电传感器——基于红外反射式的测速机
引言 在工程实践中,经常会遇到各种需要测量转速的场合。转速是电动机极为重要的一个状态参数,在很多运动系统的测控中,都需要对电机的转速进行测量,不论是直流调速系统还是交流调速系统,只有转速的高精度检测才能得到高精度的控制系统。迄今为止,测速可分为两类:模拟电路测速和数字电路测速。随着微电子技术的发展,计算机技术的广泛应用,出现了以计算机为核心的数字测速装置。这样的速度测量装置测量范围宽、工作方式灵活多变、适应面广,具有普通数字测速装置不可比拟的快速性、精确性和优越性。 一:设计思路 用一个红外发光二极管和一个接受红外光的二极管组成一套光电管。当检测到物表面为黑色时,反射光很弱,接收端检测到的光线可以忽略,使接收端呈现一种状态,例如开关管截止;当被检测物表面为白色时,反射光强烈,发射端发射的红外线被接收端全部接收,使接收端呈现另一种相反的状态,例如开关管开通。这两种相反的状态表现在电路中,就是高低电平组成的脉冲信号。由此,我想到用一个比较器来比较两种接受到的信号,从而输出“0”“1”两种高低电平,并把两种信号传给单片机进行统计,然后利用设定算法进行计算,最后通过数码显示管显示计算结果。 二:所需模块 本测速系统共有两个模块构成,一个为光电传感器部分,用于接收光信号并转换为电信号,即高低电平信号;另一个为单片机部分,用于接收高低电平信号并通过内部计算,然后再通过数码显示管显示测出的结果。 (一)光电传感器部分 (1)LM339工作原理及管脚图: LM339类似于增益不可调的运算放大器。每个比较器有两个输入端和一个输出端。 两个输入端中的一个称为同相输入端,用“+”表示,另一个称为反相输入
河北科技大学 课程设计报告 学生姓名:齐文华学号:12L0751265 专业班级:电子信息工程L126班 课程名称:传感器原理及应用 学年学期:2 014 —2 015 学年第一学期 指导教师:陈书旺 2 0 1 4 年12月
课程设计成绩评定表
目录 一、引言----------------------4 二、设计电路及原理------------4 三、元件清单------------------5 四、相关元器件的说明和介绍----6 五、课设步骤------------------11 六、实物图--------------------11 七、发现问题并解决问题--------13 八、心得与体会----------------13 九、参考文献------------------14
一、引言 1.课程设计的目的 1)使学生掌握传感器的使用方法和设计要点的基本技能,加深学生对“传感器原理及检测技术”理论知识的理解,为从事仪器系统开发与设计打下基础。 2)锻炼学生自主独立完成课程设计的能力,培养学生积极动手创新的精神。3)通过课程设计提高我们动手实践能力,为我们以后更好的学习传感器和其他的相关知识奠定基础,使我们更好地适应现代社会的需求。 2.设计思路来源 随着科学技术的发展,许多高端技术已经实现了自动检测与控制。同时传感器的应用也逐渐增多,遍及人们生活的各个方面,给人们的生产和生活带来极大的方便。 本设计选用光敏传感器,对特殊场合的光照强度进行检测与报警。主要应用于农业大棚、城市照明等对光照强度有要求的场合。本设计用发光二极管作为警示灯,当光照强度不满足要求时就会发光起到警示的作用。 二、实际电路及原理 1.电路图
磁阻式传感器KMZ41的特点: 内部包含有两个有磁阻构成的、位置成正交的、独立的电桥(Wheatstone Bridge)。其内部结构如下图所示: 将KMZ41置于有X轴、Y轴构成的平面上,当旋转磁场强度变化时,KMZ41就会产生两路正弦输出的信号,两信号的相位差就代表芯片轴向与磁场方向的夹角a,输出信号波形如下图所示: 图1 图2 图1为KMZ41产生的两路正弦输出信号;图2为芯片轴向与磁场方向的夹角。UZZ9001的内部结构与工作原理: UZZ9001的芯片内部包括A/D转换器1和A/D转换器2、滤波器、算法逻辑、SPI接口、时钟振荡器、;逻辑控制及复位等。UZZ9001Y与KMZ41连接,能够将磁阻式传感器KMZ41输出的两个有相位差的正弦信号转换成数字信号输出,与微控制器配套构成一个角度测量系统。 *
角度传感器部分设计: 方案一 由UZZ9000和KMZ41构成的角度检测电路: UZZ9000为线性电压输出式角度传感器调理器电路,输出电压与被测角度信号成正比;测量角度的范围是0~180°,且在0~100°范围内;测量误差小于±0.45°分辨力达0.1°;测量范围和输出零点均可调节;电源电压范围为+4.5~+5.5V;电源电流为10mA;工作温度范围是-40~+150℃。 由UZZ9000和KMZ41构成的电压输出式角度检测电路如图所示。改变R2和R3的比值,可以调节传感器1的偏移量;改变R4和R5的阻值,可以调节传感器2的偏移量;改变R6和R7的比值,可以调节零点偏移;改变R8和R9的比值;可以调节测量角度范围。电阻R2~R9可以采用电位器代替。电路输出电压送至数字电压表或者微控制器系统,即可显示出被测角度值。该电路可广泛用于发动机凸轮/曲轴速度及位置检测、节流阀控制、转向操作控制、汽车中的ABS系统等领域。 注:1.设置角度范围。在UZZ9000的引脚端13加上不同的外部电压可以选择0~30到0~180共16个不同的角度范围。
目录 摘要 (2) 1绪论 (3) 引言 (3) 电容式液位测量技术的发展 (4) 电容式液位测量现状 (4) 电容式液位测量存在的问题 (5) 电容式液位传感器的发展趋势 (5) 2本设计的电容式液位测量方法 (6) 测量原理及实现思路 (6) 液体的物理参数对液位测量的影响 (8) 极板设计 (9) 液位测量系统的基本构成 (11) 3硬件设计 (12) 电源电路设计 (12) 电容测量电路设计 (13)
放大调零电路设计 (14) A/D转换电路设计 (16) 4误差分析 (17) 电容测量误差对精度的影响 (17) 影响液位测量的主要因素 (18) 5总结 (19) 参考文献 (20) 摘要 在工业自动化生产过程中,为了实现安全快速有效优质的生产,经常需要对液位进行精确测量,继而进行自动调节、智能控制使生产结果更趋完善。 通常进行液位测量的方法有二十多种,分为直接法和间接法。直接液位测量法是以直观的方法检测液位的变化情况,如玻璃管或玻璃板法。然而随着工业自动化规模的不断扩大,因其方法原始、就地指示、精度低等逐渐被间接测量方法取代。目前国内外工业生产中普遍采用间接的液位测量方法,如浮子式、液压式、电容法、超声波法、磁致伸缩式、光纤等。其中电容式液位测量价格低廉、结构简单,是间接测量方法中最常用的方法之一。
本设计采用一种与介质无关的电容式液位测量方法,解决了传统电容测量与被测介质有关的技术难题。它可以应用于动态液位测量,尤其是在被测液体本身介质常数和液位,随时间和环境等因素容易发生变化的场合,如车用燃油油位的计量,从而向当今高精度、数字化、集成化、智能化的科学技术全面发展更迈进了一步,对满足石油化工等液位检测领域的迫切需求具有重大的理论和应用价值,前景十分广阔。 消除电容式液位测量方法中介质介电常数的因素是关键,设计符合测量方法的电容极板,通过电容电压转换电路处理为直流电压信号,由数据采集卡采集后送入单片机或计算机,最终实现算法的设计。其中电容极板设计时需注意消除和减小边缘效应和寄生电容的影响,同时要保证平板电容良好的绝缘性能和抗外界干扰性。 最后在整体设计和理论分析的基础之上,从硬件各部分进行具体的设计,包括硬件电路和各环节的信号量匹配等。通过理论计算和数据分析,验证了此液位仪具有良好的性能,达到了要求的技术指标,同时指出了需要改进和完善的地方。 1绪论
激发不同层次的学生学习传感器的兴趣 电气工程与自动化系王文川 论文摘要:本文结合传感器教学改革实践的经验,笔者提出了一种适合当前成都市技师院校传感器实践教学的新思路,突出“能力为本”的思想,打破“学科为本”的模式,激发学生学习的积极性,培养学生的工程意识、分析问题和解决问题的能力,针对不同层次的学生,直升学生、三高学生、五高学生、预备技师学生等,作出相应的教学方案和教案及教学方法,并针对学生是否实训,作出具体的学习方案,因此提高学生的创新能力和综合素质。 前言 21世纪是信息科学与技术全新发展的时代,信息技术已经成为社会发展一股新的强大推动力。传感器技术作为信息技术和产业的重要组成部分,因此受到了国家和社会各个行业的高度重视,并且迅速发展。在《传感器技术》这门课程中我们了解了各种各样的传感器,如:电阻式传感器变磁阻式传感器,电容式传感器,磁电式传感器,压电式传感器,热电式传感器,光电式传感器,光纤式传感器,数字式传感器,化学传感器,生物传感器等,还有更多的传感器新技术。传感器技术是以传感器为核心论述其内涵、外延的学科,也是一门涉及测量技术、功能材料、微电子技术、精密与微细加工技术、信息处理技术和计算机技术等相互结合形成的密集型综合技术。当今的传感器是一种能把非电输入信息转换成电信号输出的器件或装置,通常由敏感元件和转换元件组成。 传感器未来的发展主要朝着以下四个方面:⑴发现新效应,开发新材料、新功能;新的效应和现象的发现,是新的敏感材料的开发的重要途径,而新的敏感材料的开发是新型传感器出现的重要基础。⑵
传感器的多功能集成化和微型化;所谓集成化就是在同一芯片上,或将众多同类型的单个传感器件集成为一维,二维或三维阵列型传感器,或将传感器件与调理、补偿等处理电路集成一体化。微型传感器是朝着微米/纳米技术领域发展,其显著特征就是体积小、重量很轻,这种传感器一般应用于航空航天,环境保护,生物医学和工业自动化等高科技领域。⑶传感器的数字化、智能化和网络化;传感器的数字化提高传感器本身的多种性能。智能化是指传感器具有一种或多种敏感功能,不仅能实现信息的探测、处理、逻辑判断和双向通讯,而且具有自检测、自校正、自补偿、自诊断等多功能的器件或装置。传感器网络是一种由众多随机分布的一组同类或异类传感器节点与网关节点构成的无线网络。⑷研究生物感官,开发仿生传感器;利用仿生学、生物遗传工程和生物电子学技术研究它们的机理,研究仿生传感器,也是一个十分引人注目的方向。 所以学习与掌握各种传感器的应用对于我们电气工程与自动化类专业显得尤为重要。也是把握科技最新前沿的一条途径。也就是说,学会传感器的应用技术,好的就业在等你。本次课程设计主要是传感器在测位移方面应用的研究,对不同的传感器测位移原理的特性比较和研究,自己设计3种以上位移传感器,写出设计方案,针对不同层次的学生,直升学生、三高学生、五高学生、预备技师学生等,写出不同的教学方案,并对每种位移传感器原理、测量电路、输出特性、灵敏度、精度进行分析。比较每一种传感器的优缺点及改善方法,最后做出总结。此次课程设计可以更好的帮助我们掌握所学的知识。
燕山大学毕业设计/论文Rogowski线圈电流传感器的积分器设计 *** 燕山大学 2012年6月
本科毕业设计(论文)Rogowski线圈电流传感器的积分器设计 学院(系):*** 专业:08级应用电子 学生姓名:*** 学号:*** 指导教师:*** 答辩日期:2012年6月17日
燕山大学毕业设计(论文)任务书 学院:电气工程学院系级教学单位:电气工程及自动化 学号*** 学生 姓名 *** 专业 班级 应电-2 题目题目名称Rogowski线圈电流传感器的积分器设计 题目性质 1.理工类:工程设计(√ );工程技术实验研究型(); 理论研究型();计算机软件型();综合型() 2.管理类(); 3.外语类(); 4.艺术类() 题目类型 1.毕业设计(√) 2.论文() 题目来源科研课题()生产实际()自选题目(√) 主要内容 研究一种能够克服低频噪声和零点漂移的反馈电路,并且给出积分运算放大器的设计过程,将罗氏线圈的测量带宽扩展到1MHz以上。 基本要求 推导电路传递函数模型。仿真测试频率响应设计的结果,以及在测量dI/dt高于100A/us的磁压缩脉冲电流时的波形,并将测量效果与典型电流CT进行分析对比。 参考资料[1]W. F. Ray, R. M. Davis, “High frequency improvements in wide bandwidth Rogowski transducers,” EPE 99 Conference Proceedings, Lausanne. Sept 1999. [2]W. F. Ray, “Wide Bandwidth Rogowski Transducer: Part 2- Integrator”EPE Journal, Vol. 3, No. 2, pp. 116-122,1993 [3]W. F. Ray, C. R. Hewson, “High performance Rogowski current transducers, ” IAS IEEE Industrial Applications Society, Conference Proceedings, No.5, pp.3083-3090, Rome 2000 [4]W. F. Ray, R. M. Davis, “Wide bandwidth Rogowski current transducers Part 1 -The Rogowski coil, ”EPE Joumal, No.3, pp.51-59,1993 [5]W. F. Ray, C. R. Hewson, J. M. Metcalfe, “High frequency Effects in Current Measurement Using Rogowski Coil, ”2005 European Conference on Power Electronics and Applications, Vol. 2005, pp. 1665785,Sept 2005, Dresden, Germany. 周次1—4周5—8周9—12周13—16周17—18周应 完 成的内容查阅资料、 分析原理 建立空芯线圈 和有源外积分 电路的数学模 型 仿真传感头与 积分电路设计 是否匹配; 分析仿真结 果;评估积 分电路的性 能和局限; 撰写论文 准备答辩 指导教师:*** 职称:讲师2012年1月2日系级教学单位审批: 年月日
2010年05期(下 )角度传感器简单应用系统 叶贞贞 (合肥学院电子信息与电气工程系 安徽 合肥 230061) 【摘要】本设计以C8051F005单片机为控制核心,用单轴倾角传感器SCA60C 检测平衡板倾斜角度,通过对步进电机的控制达到了控制平衡板旋转角度的目的。 【关键词】角度传感器;C8051F005单片机;角度预置;步进电机;显示联动 0.引言 传感器在现代信息技术中有着举足轻重的地位,传感器为系统提供进行处理和决策所必需的原始信息,很大程度上影响和决定着系统的性能,本设计采用以单片机为控制单元,用单轴倾角传感器检测平衡板倾斜角度,采取步进电机控制平衡板角度自动旋转目的。 1.硬件电路设计 角度传感器硬件连接图如图1所示,当步进电机带动平衡板倾斜到使角度传感器SCA60C 处于水平位置时,Vo 端输出+0.5V 的模拟电压。传感器SCA60C 仅可精确检测到0~90度的角度范围,当平衡板转到使角度传感器与水平面成90度的角度时,此时Vo 端输出+5V 的模拟电压。在0~90度的倾角范围内,Vo 端输出的是正比于倾角大小的+0.5~+5V 的模拟电压信号,当平衡板转动到使角度传感器与水平面间的角度从90度到180度的范围变化时,输出端Vo 输出的是从+5V 依次变化到+0.5V 的模拟电压信号[1][2],因此通过测定传感器SCA60C 输出端Vo 电压的大小即可确定平衡板与水平面的夹角。 图1角度传感器硬件连接图 图2步进电机驱动电路原理图 步进电机驱动电路的设计本系统中,我们选择4相5线步进电机,其驱动电路主要由L297+L298组成,该驱动电路集驱动与保护于一体。L297是脉冲分配器,只要步进电机A 、B 、C 、D 四项依次连接到J1的1、2、3、4各点,且将剩下的一条线接地,L297就会自动的将输入到端口CW/CCW 的脉冲分配给步进电机的各个相序,此时步进电机便可转动[3][4]。控制电机时只需单片机通过I/O 口向L297的cw/ccw 和clock 端发送控制信号即可控制它的转速和正反转。驱动电路原理如图2。 本系统主要由主控制器模块、角度检测模块、A/D 转换模块、键盘模块和显示器模块等部分组成,系统连接图如图3所示: 图3系统框图 图4程序流程图(下转第8页 ) 作者简介:叶贞贞(1987.1—),女,汉族,安徽安庆人,就读于合肥学院06级电子信息与电气工程系电子信息工程专业。 ◇高教论述◇
摘要:泡沫是一种特殊的两相流形态,其力学、热学、光学等多种性能均与单相气体或液体有很大区别,由于泡沫的形成机理多样、性质变化复杂,至今尚无完善的研究理论体系,泡沫的液位测量在国内外也是一个空白开发了一种基于传热原理的测量泡沫液位的传感器,介绍了传感器的构造和原理,以及测量误差和动态响应的计算分析: 1引言 泡沫是气一液联合构造的特殊形态,也是一种具有重要研究价值的边界形态。在自然界和工业生产过程中,普遍存在着大量的泡沫和泡沫性物质。在有些领域它们对人类的生产和生活起着积极的推动作用,比如泡沫浮选、啤酒制造和消防;然而有时候泡沫的形成却起着相反的作用,比如造纸过程和放射性废水浓缩过程,能否有效地监测和控制泡沫,直接关系着产品质量和生产效率。目前,生产和科研领域急需用于泡沫测量的仪表。 通过对泡沫的深入调研,开发r一种基于传热原理的测量泡沫液位的传感器ll J,介绍其构造和原理,并进行了测量误差和动态特性的计算分析。 2泡沫概述 2.1泡沫的定义 随着现代科学技术的发展,对于泡沫的研究越来越受到各行业的重视,然而“泡沫”至今仍无统一的定义,人们也经常将它与其他状态的物质相混淆。英语中“泡沫”称为“foam”,常用的“bubble"是指“气泡”,而不是“泡沫”。现在比较通用的一种泡沫界定方法如下(如图1): 图 1 泡沫与气泡、气泡分散体示意图 (1)气泡:浮于气体中的单个液膜包裹气体物,如娱乐中吹的肥皂泡; (2)泡沫:气多液少的“气/液”粗分散体,如污水处理产生的泡沫; (3)气泡分散体:液多气少的“气/液”粗分散体,如液体中的气泡。 2.2 泡沫的形成和稳定条件 泡沫形成的基本要素为:气液接触,含助泡剂,并且发泡速度高于破泡速度。 液体表面形成的泡沫如果不能够保持稳定,不会对外界产生明显的影响,影响泡沫稳定的主要因素是Marangoni效应,又叫作“自我痊愈效应”;表面粘度;液膜表面电荷;以及熵性双层互斥作用。 2.2泡沫的研究 目前泡沫的研究主要在两个方面:一是对于泡沫稳定性的研究,其重点在于增加泡沫流体的稳定性和消泡;二是对液体中气泡的动力学性质研究,主要研究方向有:在界面上气泡的生成理论、生长速率、动力学、脱离理论和数值模拟以及气泡传热传质的研究。泡沫的研究手段主要有: (1)声学技术:主要包括声学共振、脉冲探测,声纳复合频率反射方法,声学方法在海洋泡沫研究中使用较多;
红外、光控制开关设计报告 摘要:用红外线人体感应开关开关和光敏开关控制路灯,白天光线强,路灯不亮,只有光线暗时,通过红外线人体感应开关感应到有人时路灯亮,并且灯点亮一定时间后,自动熄灭。红外、光控制开关来解决了电资源浪费的问题。 关键词:红外线人体感应开关;光控开关 一、设计电路 设计过程如下所述:此电路功能的实现共包括四个部分:它主要由一个自制+5V 直流电源、红外线人体感应开关,有光敏电阻控制的总开关和继电器控电子开关等四部分组成。 在白天由光控部件控制电路,无论外界有无人走动电路都不会工作,而到了晚上光控部件就不在起作用由红外线人体感应开关控制电路,只要在一定距离内有人走动且达到一定距离电路就会导通工作;由该事例可知红外线、光两部分是相互联系的没有光控制电路不完善,没有红外线控制电路也谈不上电路的利用价值,总的来说电路的设计较完备。 因此电路总框图如下: 电源部分:其中的电源部分采用全波整流电路将交流220V 电压变为约+5V 的直流电压,为 光控开关 继电器 红 外线感应 电路自动延时 +5V 电源供电
后面的控制电路供电,例如桥式整流电路;受控开关受触发延时电路输出信号的控制,从而控制加于灯上的交流电压,达到控制开关灯的目的。 光控制开关:光敏电阻器又叫光感电阻,是利用半导体的光电效应制成的一种电阻值随入射光的强弱而改变的电阻器。入射光强,电阻减小,入射光弱,电阻增大。光敏电阻器一般用于光的测量、光的控制和光电转换(将光的变化转换为电的变化)。通常,光敏电阻器都制成薄片结构,以便吸收更多的光能。当它受到光的照射时,半导体片(光敏层)内就激发出电子—空穴对,参与导电,使电路中电流增强。 红外线人体感应开关:红外线人体感应类开关又叫热释人体感应开关或红外智能开关。它是基于红外线技术的自动控制产品,当人进入感应范围时,专用传感器探测到人体红外光谱的变化,自动接通负载,人不离开感应范围,将持续接通;人离开后,延时自动关闭负载。 二、电路分析调试 1、电源部分 +5V电源部分,采用桥式整流电路,电路图如下: 图1桥式整流电路图 2、红外线人体感应电路
高侧电流传感器AD8205及其应用电路设计 摘要:AD8205是美国模拟器件公司推出的一种单电源高性能差分放大器,典型单电源供电电压为5V,其共模电压输入范围为-2~65V,可以耐受-5~+70V的输入共模电压,适用于高共模电压情况下检测小差分电压的工业设备中。它的增益固定为50V/V,工作温度范围为-40~+125℃叙词:模拟器件/电路设计/高侧电流/传感器AD8205 AD8205是美国模拟器件公司推出的一种单电源高性能差分放大器,典型单电源供电电压为5V,其共模电压输入范围为-2~65V,可以耐受-5~+70V的输入共模电压,适用于高共模电压情况下检测小差分电压的工业设备中。它的增益固定为50V/V,工作温度范围为-40~+125℃,失调电压温漂小于15mV/℃,增益温漂小于30ppm/℃(环境温度可高达125℃),在整个规定温度范围内具有优良的直流性能,其从直流到100kHz的频带范围内具有高达80dB的共模抑制比。因此其测量环路误差小,精度高,非常适合用于马达控制、传动控制、磁悬浮控制、车辆动力控制、燃料喷射控制、引擎管理和DC-DC变换等控制系统中。 内部电路结构及其工作原理 AD8205的内部电路由A1和A2两个集成运放和一个电阻网络,以及一个小参考电压源和偏置电路构成,其电路结构如图1所示。 A1的前置衰减由电阻RA、RB、RC组成,可将共模电压衰减到合适的输入电压范围内。两组衰减器构成桥式网络,衰减率为1/16.7。输入信号经过衰减以后,使得输入信号的幅值保持在供电电源电压范围以内,当输入电压超过供电电源电压或低于公共地端的电压时,内部参考电压起作用,使得放大器在输入负共模电压信号时仍然可以正常工作。当电桥平衡时,共模电压信号产生的差分输入信号为0V。当然,输入网络同时也衰减了输入差分电压信号,放大器A1将衰减后的信号放大26倍,其输入和输出都采用差分形式以获得最大的交流共模抑制比。另外电阻RA、RB、RC、RD和RF通过激光校准后的电阻匹配率优于0.01%,这种高精度校准使得器件能够获得超过80dB的共模抑制比。 放大器A2将A1输出的差分信号转换成单端信号,并放大32.15倍。参考输入端VREF1和VREF2都经过电阻RREF连接到A2的同相输入端,使得输出可以任意调整到所需要的输出电压范围内。当两个参考输入端并联使用时,参考电压从输入到输出的增益为1V/V;当单独使用任何一个参考输入端时,其增益为0.5V/V。AD8205的总增益由衰减电路的衰减率1/16.7、A1的放大倍数26和A2的放大倍数32.15构成。AD8205具有300μA的吸收下拉电流能力,采用A类PNP管接上拉电阻输出。 输出方式设置 单极性输出 此方式一般用来测量流过采样电阻上的单方向变化的电流。有两种基本模式:以地为参考和以V+为参考的输出模式。在单极性工作模式下,当差分输入为0时,输出可以偏置到负向(接近地)或正向峰值(V+)。当差分电压加到输入端时,输出将反向移动到峰值。这时满幅输出所对应的输入差分电压幅值接近100mV,它的极性由输出电压的静态设置所决定。当偏置到正向峰值时,输入差分电压应该为负,输出由正向峰值下降;反之,若静态偏置到地,则输入差分电压应该为正,输出由0上升。 以地为参考的输出连接方式如图2(a)所示。它的两个参考输入端都接到地上,当输入的差分电压为0时,其输出被偏置到反相峰值(约0.05V)。 以V+为参考的输出连接方式如图2(b)所示。它的两个参考输入端都连接到正电源上,当输入的差分电压为0时,其输出被偏置到正相峰值(约4.8V)。 双极性输出 双极性输出时AD8205可以测量流过采样电阻上的双向电流,这时,输出可以偏置到输出范围内的任意位置。当被检测的正反两个方向上的电流为等幅时,其输出必须偏置到满量
角度传感器简单应用系统 时间:2011-04-24 09:42:20 作者:秩名 论文导读:传感器在现代信息技术中有着举足轻重的地位,传感器为系统提供进行处理和决策所必需的原始信息,很大程度上影响和决定着系统的性能,本设计采用以单片机为控制单元,用单轴倾角传感器检测平衡板倾斜角度,采取步进电机控制平衡板角度自动旋转目的。 本设计以C8051F00单片机为控制核心,通过把单轴倾角传感器SCA60(水平的固定 在平衡板上,达到了实时检测平衡板倾斜角度的目的,并通过对步进电机驱动电路的控制实现了平衡板的转动。 关键词:角度传感器,C8051F00单片机,角度预置,步进电机,显示联动 0.引言: 传感器在现代信息技术中有着举足轻重的地位,传感器为系统提供进行处理和决策所必需的原始信息,很大程度上影响和决定着系统的性能,本设计采用以单片机为控制单元,用单轴倾角传感器检测平衡板倾斜角度,采取步进电机控制平衡板角度自动旋转目的。 1.硬件电路设计 角度传感器硬件连接图如图1所示,当步进电机带动平衡板倾斜到使角度传感器SCA60C处于水平位置时,V端输出+0.5V的模拟电压。传感器SCA60(仅可精确检测到0~90度的角度范围,当平衡板转到使角度传感器与水平面成90度的角度时,此时Vo端输出+5V的模拟电压。在0?90度的倾角范围内,Vo端输出的是正比于倾角大小的+0.5?+5V的模拟电压信号,当平衡板转动到使角度传感器与水平面间的角度从90度到180度的范围变化时,输出端Vo输出的是从+5V依次变化到+0.5V的模拟电压信号[1][2],因此通过测定传感器SCA60C输出端Vo电压的大小即可确定平衡板与水平面的夹角。 步进电机驱动电路的设计本系统中,我们选择4相5线步进电机,其驱动电路主要由L297+L298组成,该驱动电路集驱动与保护于一体。L297是脉冲分配器,只要步进电机A B、C D四项依次连接到J1的1、2、3、4各点,且将剩下的一条线接地,L297就会自动的将输入到端口CW/CC的脉冲分配给步进电机的各个相序,此时步进电机便可转动[3][4]。控制电机时只需单片机通过I/O 口向L297的cw/ccw和clock端发送控制信号即可控制它的转速和正反转。驱动电路原理如下图2。论文参考。论文参考。 图1角度传感器硬件连接图图2步进电机驱动电路原理图 本系统主要由主控制器模块、角度检测模块、A/D转换模块、键盘模块和显示器模块等部分组成,系统连接图如图 3
北京信息科技大学 测控综合实践 课程设计报告 题目:基于光电传感器的直流电机转速测量系统设计学院:仪器科学与光电工程学院 专业:测控技术与仪器 学生姓名:
摘要 摘要 基于单片机的转速测量方法较多,本次设计主要针对于光电传感器测量直流电机转速的原理进行简单介绍,并说明它是如何对电机转速进行测量的。通过实验得到结果并进行了数据分析。 本次设计应用了STC89C52RC单片机,采用光电传感器测量电机转速的方法,其中硬件系统包括脉冲信号的产生模块、脉冲信号的处理模块和转速的显示模块三个模块,采用C语言编程,结果表明该方法具有简单、精度高、稳定性好的优点。 关键词:直流电机;单片机;PWM调节;光电传感器
Abstract
目录 摘要................................................................................................I 第一章概述 (1) 1.1 课设目标 (1) 1.2 内容 (1) 第二章系统设计原理 (2) 2.1 STC89C52单片机介绍 (2) 2.2 STC89C52定时计数器 (4) 2.3 STC89C52中断控制 (6) 2.4 光电传感器 (6) 2.5 数码管介绍 (7) 第三章硬件系统设计 (10) 3.1测速信号采集及其处理 (10) 3.2 单片机处理电路设计 (11) 3.3 显示电路 (12) 3.4 PWM驱动电路 (13) 第四章软件设计 (14) 4.1语言选用 (14) 4.2程序设计流程图 (14) 4.3原程序代码 (15) 第五章数据分析 (19) 总结 (20) 附件 (21) 参考文献 (23)
电气工程学院 传感器课程设计报告 班级:电132 姓名:袁吉收 学号:1312021047 设计题目:智能家居监控系统设计设计时间:2015.12.22~12.28 评定成绩: 评定教师:
摘要 本文设计的智能家居系统以AT89C51单片机为核心控制单元,实时获取DS18B20温度传感器、TGS813气敏传感器、UD-02感烟传感器数据.并通过LCD1602来显示当前的状态。 关键字:AT89c51、DS18B20、TGS813、UD-02、LCD1602
目录 一、题目要求 1.1 题目介绍 1.2 模块分解 二、方案设计 2.1 方案介绍 三、硬件设计 3.1硬件原理图 四、软件设计 4.1时序图 五、设计总结 六、参考文献 附件:程序代码
一、题目要求 1.1智能家居监控系统设计 以提高家居生活的安全性、舒适度、人性化为目的,设计智能家居监控系统。利用所学的传感器与检测技术知识,实现家居温度、煤气泄漏、外人闯入、火灾(烟雾)的检测(以上检测项目必做。在此基础上增加检测项目并具有可行性,加分。除环境监测项目外,也可增加人体信号检测等。)。各检测节点可通过无线方式连接到主机,检测到危险信号后,主机可采用声光报警或远程报警。 要求(1)用Protel 画出设计原理图; 智能化家居中的 传感器 活动物体 传感器 烟雾传感器 二氧化碳 传感器 温度传感器 火焰传感器 总 线 终端 控制对象
(2)采用Quaters II、Maxplus II、multisim(EWB)、pspice、Proteus中的一种或几种软件,完成系统电路图部分或全部仿真,在设计说明书中体现仿真结果; (3)写设计说明书; 1.2模块分解 1. 温度检测:采用DS18B20温度传感器。 2. 煤气泄漏检测:气敏传感器TGS813来检测空气中的可燃性气体。 3. 烟雾检测:UD-02离子感烟传感器检测空气中烟雾。 二、方案设计 2.1方案设计及选择 在实际设计中我们要考虑的因素有很多,比如成本最低、性价比最高、性能最优、功能最强、界面最友好等等。而本次课设我采用了性价比最高的方案(首先能实现基本功能)。选用了DS18B20、TGS813、UD-02、LCD1602模块实现本次设计。 基于AT89c51的智能家居系统设计 智能家居是人们的一种居住环境,其以住宅为平台安装有智能家居
传感器课程设计说明书 电容式导电液体液位传感器Capacitive conductive liquid level sensor 学院名称:机械工程学院 专业班级: 学生: 学生学号: 指导教师: 指导教师职称:教授 2012年 1 月
电容式导电液体液位传感器 专业班级:**** 学生:**** 指导老师:**** 职称:**** 摘要在工业自动化生产过程中,为了实现安全快速有效优质的生产,经常需要对液位进行测量,继而进行自动调节、智能控制使生产结果更趋完善。 通常进行液位测量的方法有二十多种,分为直接法和间接法。直接液位测量法是以直观的方法检测液位的变化情况,如玻璃管或玻璃板法。然而随着工业自动化规模的不断扩大,因其方法原始、就地指示、精度低等逐渐被间接测量方法取代。目前国外工业生产中普遍采用间接的液位测量方法,如浮子式、液压式、电容法、超声波法、磁致伸缩式、光纤等。其中电容式液位测量价格低廉、结构简单,是间接测量方法中最常用的方法之一。 本设计采用一种简单方便的电容式液位测量方法,电容式传感器是将被测非电量的变化转化为电容变化量的一种传感器,它具有结构简单、分辨力高、可实现非接触测量,并能在高温、辐射和强烈震动等恶劣条件下工作等优点,是很有发展前途的一种传感器。 本电容式液位测量设计方式是用等径的长直圆筒容器,液位的高低正比于导电液体与测杆中导电金属铜之间电容的大小,通过测量电路的转换,就可以很方便地测量出液面的位置。 此课程设计的目的是为了熟练掌握电容传感器的基本知识和各种测量电路的原理运用;基本掌握测量液位方法的基本思路和方法;能够利用所学的基本知识和技能,解决简单的传感器测量问题;培养综合利用传感器进行测量设计的能力。 关键词:液位测量电容式传感器测量电路电容传感器测量
光电传感器的设计-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
光电传感器的设计 题目:光电传感器的设计 院(系):信息工程学院 专业:光电信息科学与工程 姓名:褚飞亚 学号: 20 指导教师:张洋洋 2016年6月27号
摘要 随着信息技术的迅猛发展,传感器的应用技术也在飞速发展,新的应用技术呈现出爆炸式的发展。传感器作为作为测控系统中对象信息的入口,作为捕获信息的主要工具,在现代化事业中的重要性已被人们所认识。光电传感器的应用技术为信息科学的一个分支,俗称“电眼”。它是将传统光学技术与现代微电子技术以及计算机技术机密结合的纽带,是获取光信息或借助光提取其他信息的重要手段。现如今汽车成为大多数人必不可少的东西。经常开车的朋友们,应该都有过这样的苦恼每次开车到了单位或者小区大门口都要等门卫来开门或者等其按动电动门的开关,既费时间又费人力,如果巧妙地利用光电传感器就可以实现光控大门。所以借此次课程设计来设计一个光控大门,即把光敏电阻装在大门上并且在汽车灯光能照到的地方,把带动大门的电动机接在干簧管的电路中,那么夜间汽车开到大门前,灯光照射到光敏电阻时,干簧继电器就可以自动接通电动机电路,电动机就能带动大门打开。这样就解决了上述的问题。
目录 1、设计要求...............................................错误!未定义书签。 功能与用途 ............................................................................................. 错误!未定义书签。 指标要求 ................................................................................................. 错误!未定义书签。 2、光电传感器介绍及工作原理 ...............错误!未定义书签。 、光电传感器 ......................................................................................... 错误!未定义书签。 工作原理 ................................................................................................. 错误!未定义书签。 3、方案设计...............................................错误!未定义书签。 4、元件选择和电路设计 ...........................错误!未定义书签。 元件选择 ................................................................................................. 错误!未定义书签。 电路设计 ................................................................................................. 错误!未定义书签。 5、总结.......................................................错误!未定义书签。参考文献.....................................................错误!未定义书签。