基于KMZ60的EPS转角传感器设计
摘要方向盘转角信号是电动助力转向系统和车身电子稳定系统的重要输入量。本文借鉴国内外成熟的方向盘转角测量方案,解释了游标法测量方向盘绝对转角的方法,设计以磁阻式磁场角度传感器KMZ60与MC9S08DZ60单片机为核心的硬件电路和相应的信号处理方式,开发成本低廉、能够实现多圈测量的非接触式转角传感器。通过专用的测试平台对转角传感器进行标定,验证转角传感器能够基本满足电控系统的精度需求。
关键词转角测量;转角传感器;游标法;KMZ60
0 引言
为了使汽车更加节能、安全、环保,越来越多的汽车开始装配电动助力转向系统(EPS)和车身电子稳定系统(ESP)。传统的有刷电机EPS只装配转矩传感器,转向盘转速信号主要依靠估算的方法获得。但这种方法的误差较大,限制了EPS 性能的进一步提高。将方向盘转角传感器引入EPS,能够有效提升EPS的回正和摩擦补偿性能,改善汽车的操作稳定性。此外,ESP等底盘电控系统需要从EPS共享转角信号,实现各自的控制功能,从而实现底盘一体化控制。
经过多年的研究和发展,方向盘转角传感器从最初的电位计式、单圈测量的传统角度传感器,发展到能够非接触式、多圈测量的智能传感器。以博世公司LSW3为代表的游标法转角测量方案是一种比较理想的多圈测量方案,因而被多家公司应用于各自的转角传感器中。国内高校在其基础上做过多种仿制和改进,且大多采用集成CORDIC模块的角度测量芯片,该类型芯片通常成本较高,因而难以控制转角传感器的成本。本文借鉴LSW3的机械结构,自行开发传感器的硬件电路,设计信号的软件处理流程,研发了一款结构简单、价格低廉、精度适中、能够实现多圈测量的方向盘转角传感器。
1 测量原理
通常轿车方向盘的机械行程为3圈,即1080°左右。通用的磁场角度传感器包含各向异性磁阻型(AMR)、巨磁阻型(GMR)以及霍尔型(Hall)等类型,三者的量程通常是180°(AMR型)和360°(GMR型、Hall型),因此,转角传感器的核心在于扩展传感器量程,采用小量程的磁场角度传感器实现多圈测量。
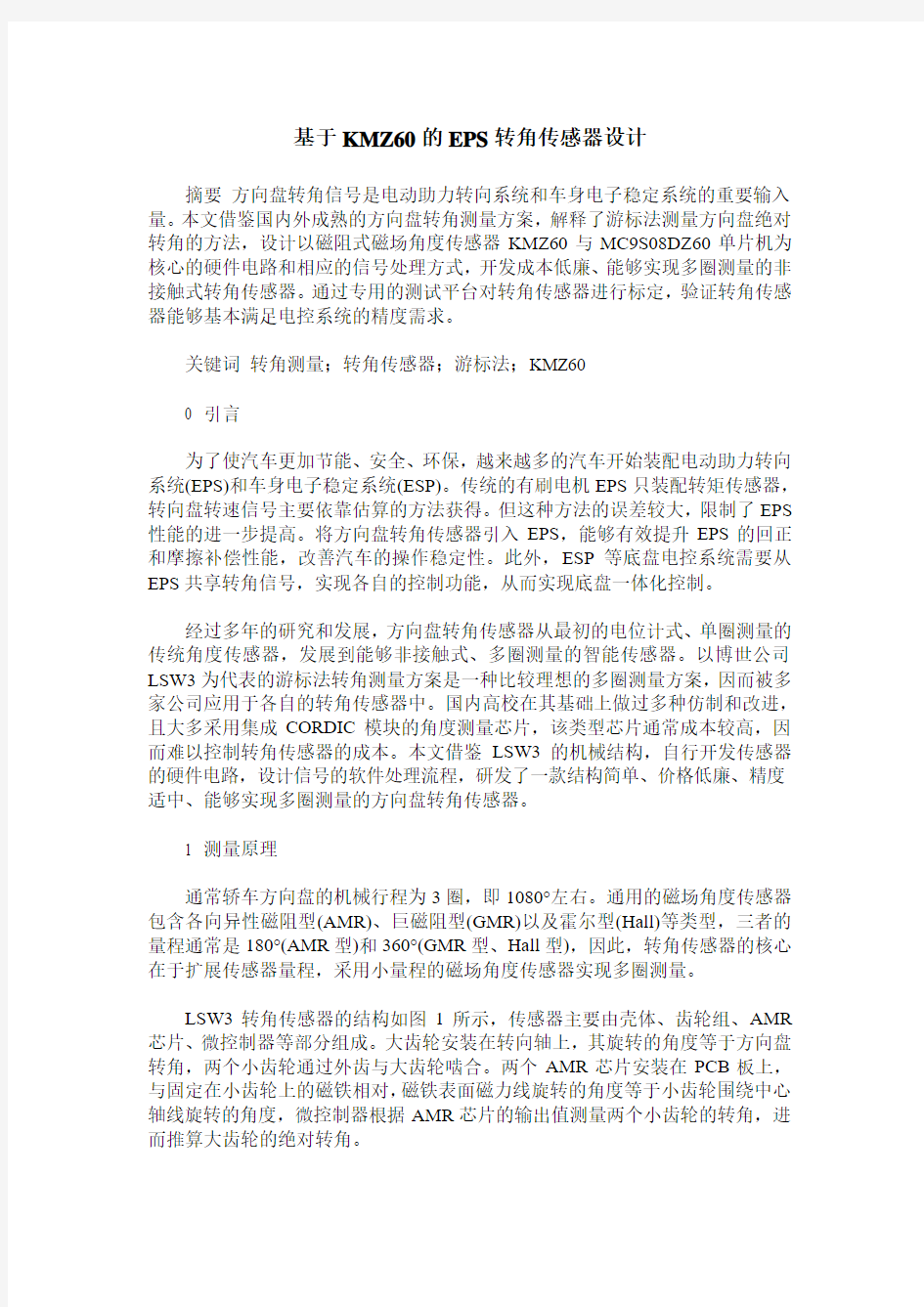
LSW3转角传感器的结构如图1所示,传感器主要由壳体、齿轮组、AMR 芯片、微控制器等部分组成。大齿轮安装在转向轴上,其旋转的角度等于方向盘转角,两个小齿轮通过外齿与大齿轮啮合。两个AMR芯片安装在PCB板上,与固定在小齿轮上的磁铁相对,磁铁表面磁力线旋转的角度等于小齿轮围绕中心轴线旋转的角度,微控制器根据AMR芯片的输出值测量两个小齿轮的转角,进而推算大齿轮的绝对转角。
Features ■ True power-on system ■ Straight line connector ■ Output over CAN bus ■ Various column mounting proposals Introduction Non-Contacting Steering Angle Sensor Type 6002 Speci? cations are subject to change without notice. Customers should verify actual device performance in their speci? c applications. Angular Position Range ............................................................................±780 ° Resolution ...............................................0.1 ° (optional <0.1 °) Accuracy ............................................................................±2 °Angular Speed Range .......................................................................±2000 °/s Resolution .........................................................................4 °/s Data and Control Interface CAN 2.0A (Optional CAN 2.0B) ................................500 kbit/s Data Rate...............................................10 ms (optional 5 ms) OEM Speci? c CAN Handlers ......................................Optional Zero Position ...............Adjustable at every position through CAN command Diagnostic and Error Handling.................................Via CAN bus Optional secure version with 2nd microcontroller)Firmware Upgrade ...................................................Via CAN bus (Optional OBD programmable)Power Supply Voltage Range ...............................................................8-18 V Current Consumption.............50 mA (no idle current required)Temperature Range ...........................................-40 °C to +85 °C Bourns ? Type 6002 Non-contacting Steering Angle Sensor is based on two magneto-resistive (AMR) sensor chips. Each of them converts an angle position of a permanent magnet into two analogue signals (one sine and one cosine signal). A highly ef? cient algorithm allows for estimating the absolute angular position of a drive shaft that is connected to the device.Speci? cations Connector Tyco-No. 1-1241370-3 The mating connector’s pin layout is shown below: CAN Protocol The device sends a CAN message with the measurement data every 10 msec. An example of a message layout is shown below. OEM-speci? c CAN handler is optional.CAN Transmit Message Absolute Angle Position: ? Signed (integer) ? Angle position [degree] = N · 0.1, for 0 < N ≤ 32767 (N - digital value of the message) = (N-65536) · 0.1, for N > 32767 Angle Speed: ? Unsigned (char) ? Rotation speed [degree/s] = S · 0.4 PIN NO. SIGNAL 1CAN LOW 2CAN LOW 3CAN HIGH 4CAN HIGH 512 V 6 GND
方向盘转角传感器接口 汽车环境对电子产品而言是非常苛刻的:任何连接到12V电源上的电路都必须工作在9V至16V的标称电压范围内,其它需要迫切应对的问题包括负载突降、冷车发动、电池反向、双电池助推、尖峰信号、噪声和极宽的温度范围。在负载突降时,交流发电机的输出电压迅速升高到60V或更高的电压;冷车发动指的是在低温时起动汽车,这会引起电池电压下降至6V或更低;电池反向是在激活一个没电的电池时,由于粗心地将电缆极性接反造成的。很多牵引车都配备两个串联起来的12V电池,以在寒冷的天气中帮助起动一个电池没电的汽车。这将使电气系统的电压范围提高到了28V,直到汽车起动且牵引车司机断开跨接电缆为止。考虑到汽车电气系统由大电流电动机、继电器、螺线管、车灯和不断颤动的开关触点组成,因此出现尖峰信号和噪声就一点也不奇怪了。另外,交流发电机是采用斩波励磁调整的三相电机,有时会以非常大的电流对电池充电。因此,对于工作在汽车环境中的电路设计来说,尤其是需要适应在负载突降和双电池助推情况下产生的高输入电压电路。无源保护电路用于汽车电子产品的无源保护网络如图1所示。与此相同或类似的电路广泛用于保护与汽车12V总线连接的各种系统。这种网络防止高压尖峰、持续过压、电池反向和电流过度消耗造成损害。图1的电流保护作用很明显,如果负载电流超过1A的时间很长,保险丝F1就会熔化。D1与F1结合防止电池反向连接造成损害,大电流流经正向偏置的D1并烧断保险丝。电解电容器大约在额定电压的150%时有一个有趣的特性:随着终端电压的提高,这种电容消耗的电流也越来越大,就C1而言,它在输入持续升高时起箝位作用(最终烧断保险丝)。双电池助推时的电压为28V左右,这不会烧断保险丝,因为C125V的额定值足够高,额外消耗的电流很少。电感器增加了很小的电阻,以限制峰值故障电流以及输入瞬态的转换率,从而在存在尖峰时帮助C1实现箝位。 图1:以简单性为特点的无源保护网络 无源网络的主要缺点是它依靠烧断保险丝来防止过流、过压和电池反向造成损害。另一个缺点是,它依靠电解电容实现箝位。这种电容器老化以后,电解质会变干,等效串联电阻(ESR)提高的特性也就消失了,这会损害箝位效果。有时D1采用大的齐纳二极管以帮助这个电容器发挥作用。人们已经设计出了有源电路来克服这些缺点。有源电路图2显示了一个有源解决方案,该方案用于屏蔽敏感电路,使其免受变化不定的12V汽车系统的影响。采用LT1641来驱动输入N沟道MOSFET,而上述提供无源解决方案就不具备这种附加保护:首先,LT1641在输入低于9V时断开负载,以防在低输入电压时系统失灵,并在起动时或充电系统出现故障时,减少系统向非关键负载提供宝贵的电流的机会;其次,LT1641在首次加电时逐渐升高输出电压,对负载实行软启动;第三,通过限流和定时断路器保护输出免受过载和短路影响。如果发生电流故障,断路器就以1至2Hz的速率自动重新尝试建立连接,可以设定保护电路上行线路保险丝的容限,让它在LT1641的下行线路出现电流故障时不熔化;最后,图2所示电路隔离出现在输入端的过压状态,同时提供箝位输出,以便负载电路在出现过压时能继续正常工作。 图2:过压瞬态保护器将输出箝位在24V左右,如果输入降至低于9V就断接 在12V输入的通常情况下,LT1641将MOSFET的栅极充电至大约20V以充分提升MOSFET 的电压,并向负载提供电源。27V齐纳二极管D1的两端分别连接栅极与地,但是在9至16V 的工作电压范围内不起作用。当输入升高到超过16V时,LT1641继续给MOSFET的栅极充电,试图保持MOSFET完全接通。如果输入升得太高,齐纳二极管就会对MOSFET的栅极箝位,并将输出电压限制在大约24V。LT1641本身在其输入端能够处理高达100V的电压,而且不受栅极箝位动作的影响。栅极箝位电路比无源解决方案的箝位电路精确得多,而且简单地通过选择一个具有合适击穿电压的D1,就可以轻松调整栅极箝位电路以满足负载要求。方向盘转角传感器接口:图2所示电路在负载电流高达1A左右时工作得很好,但是就更高的
迈腾方向盘设定 迈腾转角传感器的匹配在更换转向角传感器g85、转向机总成含转向控制单元j500、转向拄开关总成含控制单元j527,做过一次车轮定位的调整,做过转向... 迈腾转角传感器的匹配 在更换转向角传感器G85、转向机总成含转向控制单元J500、转向拄开关总成含控制单元J527,做过一次车轮定位的调整,做过转向零位(中间)位置设定后,或出现故障代码:“02546”时,就需要做转向极限位置的设定。 手工设定方法: 前轮处于直线行驶状态,启动发动机,方向盘朝左转动10°左右,停顿1~2 秒钟,回正,再朝右转动10°左右,停顿1~2秒钟,回正,双手离开方向盘,停顿1~2 秒钟,然后方向朝左打到底,停顿1~2 秒钟,再朝右打到底,停顿1~2 秒钟,方向盘再回正,关闭点火开关,6 秒钟后生效。 注意:做完转向零位(中间)位置设定和转向极限位置的设定后,必须用电脑解码器进入44-02 查询转向系统无故障,设定工作才能结束。 电脑解码器设定方法 (1)连接故障诊断仪进入地址码03,输入功能码11,输入编码40168。 (2)将转向盘置于正前方居中位置,输入功能码08,查看下004通道第一显示区是否为0°(规定范围±10°)。 (3)输入功能码04→060,此时ABS、ESP、EPS警告灯点亮。 (4)输入功能码06退出,起动发动机并在平坦路面以15~20 km/h车速行驶,左右转动转向盘到极限位置,行驶一段距离后匹配即完成。 迈腾转角传感器的匹配在更换转向角传感器g85、转向机总成含转向控制单元j500、转向拄开关总成含控制单元j527,做过一次车轮定位的调整,做过转向... 迈腾转角传感器的匹配 在更换转向角传感器G85、转向机总成含转向控制单元J500、转向拄开关总成含控制单元J527,做过一次车轮定位的调整,做过转向零位(中间)位置设定后,或出现故障代码:“02546”时,就需要做转向极限位置的设定。 手工设定方法: 前轮处于直线行驶状态,启动发动机,方向盘朝左转动10°左右,停顿1~2 秒钟,回正,再朝右转动10°左右,停顿1~2秒钟,回正,双手离开方向盘,停顿1~2 秒钟,然后方向朝左打到底,停顿1~2 秒钟,再朝右打到底,停顿1~2 秒钟,方向盘再回正,关闭点火开关,6 秒钟后生效。 注意:做完转向零位(中间)位置设定和转向极限位置的设定后,必须用电脑解码器进入44-02 查询转向系统无故障,设定工作才能结束。 电脑解码器设定方法 (1)连接故障诊断仪进入地址码03,输入功能码11,输入编码40168。 (2)将转向盘置于正前方居中位置,输入功能码08,查看下004通道第一显示区是否为0°(规定范围±10°)。 (3)输入功能码04→060,此时ABS、ESP、EPS警告灯点亮。 (4)输入功能码06退出,起动发动机并在平坦路面以15~20 km/h车速行驶,左右转动转向盘到极限位置,行驶一段距离后匹配即完成。
关于逸动转角传感器维修方法 由于逸动售后和工厂多次出现转角传感器标偏或无法标定的情况,现明确以下工况需要重新进行转角传感器标定: 1、更换或者重新安装了旋转连接器总成; 2、更换或者重新安装了方向盘安全气囊; 3、更换或者重新安装了组合开关总成; 4、更换或者重新安装了方向盘总成、转向柱总成(含转向上轴总成、转向下轴总成)、动力转向器总成等转向系统零件; 5、由于其他原因将车辆重新进行了四轮定位; 6、更换或者重新安装了ESP系统; 7、其它需要重新标定的情况(例如:车辆发生了跑偏等)。 以上任意一种工况均必须对转角传感器进行标定。 具体转角传感器标定方法如下: 按以下步骤操作: 步骤一标定准备: 1、将诊断仪程序更新至最新状态(最新程序为2013年1月 15日后版本) 2、将车辆保持直行状态(轮胎直行),推荐方式为:将车辆在 四轮定位保持直行状态同时进行标定。(如不是直行状态 ESP系统将出现“C1312-转角传感器偏移或步长故障”) 3、将整车电源切换到ON档。 步骤二正确连接诊断仪,进入逸动\转角传感器初始界面,如图1所示。双击“转角传感器标定”,点“确定”键进入下一步操作,如图2所示。
第 2 页 共 7 页 图1 初始界面 图2 进入标定界面
步骤三进入之后,等待1秒以上,待输出角度和标定状态显示稳定后点击“执行”开始进行标定,如图3所示。标定中如图4所示。 注意:标定是自动过程,期间务必持续保持直行状态,不能转动方向盘、整车不能下电。 图3 标定界面 第3 页共7 页
图4标定中界面 步骤四等待诊断仪提示SAS标定成功,同时标定状态显示为已标定,未转动方向盘时角度输出为0°,此时标定成功,如图5所示。 如图6所示,诊断仪提示标定失败,则请立即返回图1所示初始界面,并将整车电源重新上电到ON档,按以上步骤重新标定。如 重复操作标定5次失败,请检测线路或其它问题。 第4 页共7 页