约束变尺度法
- 格式:doc
- 大小:133.00 KB
- 文档页数:9
拱坝分析与优化软件系统ADAO(ADCAS &ADOPT)使用说明书浙江大学水工结构研究所刘国华主编2008年1月1目录§1 ADAO拱坝分析与优化软件系统概要 (4)§2 ADAO 输入数据与软件使用的总体说明 (7)§3应力分析输入数据文件.CAS填写说明 (15)§3.1标题行 (15)§3.2主控行 (15)§3.3 分析计算中所用拱梁网格的拱圈高程行。
(20)§3.4 虚结点位置描述行 (20)§3.5 基岩材料性质描述主参数行 (20)§3.6 基岩材料性质描述附加参数行 (21)§3.7 坝体材料性质描述主参数行 (22)§3.8 坝体材料性质描述附加参数行 (24)§3.9 响应谱法地震应力分析所需的场地特性与地震强度参数 (26)§3.10 用于描述体形的拱圈层数行 (26)§3.11 拱圈参数描述行 (27)§3.11.1 用上下游面圆弧描述的单心等厚圆拱圈参数行(IAD=-1) (27)§3.11.2 用上下游面圆弧描述的五心变厚圆拱圈参数行(IAD=-2) (28)§3.11.3 用中心线圆弧描述的单心等厚圆拱圈参数行(IAD=1) (28)§3.11.4 用中心线圆弧描述的五心变厚拱圈参数行(IAD=2) (29)§3.11.5 用中心线描述的抛物线型拱圈参数行(IAD=3) (30)§3.11.6 用中心线描述的对数螺旋线拱圈参数行(IAD=4) (31)§3.11.7 用中心线描述的悬链线型拱圈参数行(IAD=5) (32)§3.11.8 用中心线描述的椭圆线型拱圈参数行(IAD=6) (33)§3.11.9 用中心线描述的混合线型拱圈参数行(IAD=7) (34)§3.11.10 非直立拱冠梁剖面的拱冠位置与方向角的描述数据 (36)§3.12 坝体扬压力径向分布折点位置描述行 (37)§3.13 气温、水温资料描述行 (37)§3.14 封拱次数与封拱温度控制行 (40)§3.15封拱温度数据行 (40)§3.16 封拱条件行 (41)§3.17 总工况数及地震烈度 (42)§3.18 各工况荷载数据行 (42)§3.19 裂缝分布描述控制行(针对有已知裂缝的已建拱坝) (43)§3.19.1 坝体裂缝总体情况描述行 (43)§3.19.2 上游坝面的特殊裂缝描述 (44)§3.19.3 下游坝面的特殊裂缝描述 (46)§3.19.4 特殊类型裂缝的拱区间的描述 (47)§3.19.5 特殊类型裂缝的梁区间的描述 (48)§3.20 超载计算条件描述行 (48)§4 拱坝优化输入数据文件.OPT填写说明 (50)§4.1 主控行 (50)§4.2 约束指标行之一(应力指标) (52)2§4.3 约束指标行之二(倒悬度、拱厚比、曲率半径变化率指标) (53)§4.4 约束指标行之三(拱冠梁厚度下限) (54)§4.5 约束指标行之四(拱冠梁厚度上限) (54)§4.6 约束指标行之五(拱端厚度下限) (54)§4.7 约束指标行之六(拱端厚度上限) (55)§4.8 约束指标行之七(左半中心角上限) (55)§4.9 约束指标行之八(右半中心角上限) (55)§4.10 约束指标行之九(与左岸基岩等高线夹角之下限) (56)§4.11 约束指标行之十(与右岸基岩等高线夹角之下限) (56)§4.12 约束指标行之十一(坝厚指数限值,坝体方量期望值) (57)§4.13 约束指标行之十二(左岸拱端顺河向期望位置) (57)§4.14 约束指标行之十三(右岸拱端顺河向期望位置) (58)§4.15 约束指标行之十四(左岸拱端顺河向位置允许偏移量) (58)§4.16 约束指标行之十五(右岸拱端顺河向位置允许偏移量) (58)§4.17 左岸坝肩可利用基岩等高线描述行 (59)§4.17.1 棱形河谷左岸坝肩可利用基岩等高线描述行 (59)§4.17.2 非棱形河谷左岸坝肩可利用基岩等高线描述行 (59)§4.18 右岸坝肩可利用基岩等高线描述行 (60)§4.18.1 棱形河谷右岸坝肩可利用基岩等高线描述行 (60)§4.18.2 非棱形河谷右岸坝肩可利用基岩等高线描述行 (61)§4.19 约束指标行之十六(封拱温度下限) (62)§4.20 约束指标行之十七(封拱温度上限) (62)§4.21 约束指标行之十八(拱冠处拱圈曲率半径之下限) (63)§5 坝肩稳定分析输入数据文件.STB填写说明 (64)§5.1 左坝肩稳定分析主控行 (64)§5.2 左岸坝肩各层拱圈的拱端下游侧端点有效嵌深 (65)§5.3 左岸坝肩有效岩体等高线高程描述行 (66)§5.4 用于表示左岸坝肩有效岩体等高线的折线的折点数 (66)§5.5 用于表示左岸坝肩有效岩体等高线的折线的折点数 (67)§5.6 右坝肩稳定分析输入数据 (67)3§1 ADAO拱坝分析与优化软件系统概要ADAO软件系统是拱坝应力分析ADCAS和拱坝优化ADOPT的集成系统,既可用于拱坝应力分析,也可用于拱坝优化设计,以及计算机辅助下的手工体形调整,已应用于许多拱坝工程的设计中,有助于提高设计进度和设计质量,具有显著的社会、经济效益。
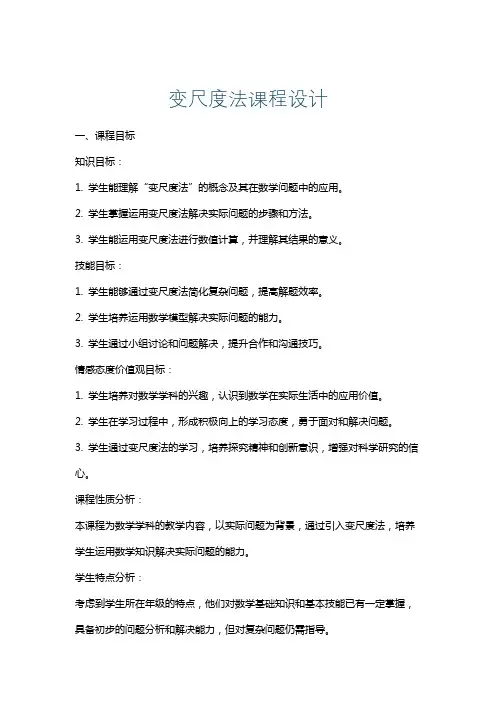
约束变尺度法Newton 法最突出的优点是收敛速度快,在这一点上其它算法无法比拟的。
因此,建议凡是Hesse 矩阵比较容易求出的问题,尽可能使用Newton 法求解。
但是,Newton 法也有一个严重缺陷,就是每次迭代都要计算目标函数的Hesse 矩阵和它的逆矩阵,当问题的维数较大时,计算量迅速增加,从而就抵消了Newton 法的优点。
为此,人们开始寻找一种算法既可以保持Newton 法收敛速度快的优点,又可以摆脱关于Hesse 矩阵的计算,这就是变尺度算法。
变尺度法是一种非常好的方法,其中DFP 算法和BFGS 算法。
可以说,直到目前为止,在不用Hesse 矩阵的方法中是最好的算法。
一、拟Newton 法为了吸收Newton 法收敛速度快的优点,同时避免Newton 法每次迭代都要计算目标函数的Hesse 矩阵和它的逆矩阵,人们提出了具有超线性收敛的拟Newton 法。
(一)拟Newton 法的基本原理在Newton 法中的基本迭代公式kk k k P t X X +=+1,其中1=k t ,)()]([12kkk Xf Xf P ∇∇-=-令)()(2kkkkXf gXf G∇=∇=,于是有,,,,21011=-=-+k g G X X k k k k其中X0是初始点, gk 和 Gk 分别是目标函数f (X )在点 Xk 的梯度和Hesse 矩阵.为了消除这个迭代公式中的Hesse 逆矩阵G-1k ,可用某种近似矩阵Hk=Hk(Xk)来替换它,即构造一矩阵序列{Hk}去逼近Hesse 逆矩阵序列{G-1k},此时kk k k g H X X -=+1事实上,式中 Pk= -Hk gk 无非是确定了第k 次迭代的搜索方向.为了取得更大的灵活性,考虑更一般的迭代公式kk k k k g H t X X -=+1其中步长tk 通过从Xk 出发沿Pk= -Hk gk 作直线搜索来确定.此式代表很广的一类迭代公式.例如,当Hk=I (单位矩阵)时,它变为最速下降法的迭代公式。
第四章
第四章
无约束优化问题标准形式:
无约束优化问题标准形式:
§
§
§
§
§
§
图最速下降法的收敛过程
αα
2
2
例4-1 求目标函数
取初始点
[2,2]
=
x
例4-2 求目标函数解取初始点[2,2]
=x
算出一维搜索最佳步长
§
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
梯度法的特点
x
给定0,ε
一般迭代式:
§4.3
§4.3
§4.3
§4.3
α0
d 0
x
x 1
x*
1
α1d 1
1()
f −∇x d 1
4-4 共轭方向法
假设目标函数f (x ) 在极值点附近的二次近似函数为
沿某个下降方向
如果能够选定这样的搜索方向,那么对于二
α
0d0
x0x1x*
1
α
1
d1
1
()
f
−∇x d
1。
变尺度法课程设计一、课程目标知识目标:1. 学生能理解“变尺度法”的概念及其在数学问题中的应用。
2. 学生掌握运用变尺度法解决实际问题的步骤和方法。
3. 学生能运用变尺度法进行数值计算,并理解其结果的意义。
技能目标:1. 学生能够通过变尺度法简化复杂问题,提高解题效率。
2. 学生培养运用数学模型解决实际问题的能力。
3. 学生通过小组讨论和问题解决,提升合作和沟通技巧。
情感态度价值观目标:1. 学生培养对数学学科的兴趣,认识到数学在实际生活中的应用价值。
2. 学生在学习过程中,形成积极向上的学习态度,勇于面对和解决问题。
3. 学生通过变尺度法的学习,培养探究精神和创新意识,增强对科学研究的信心。
课程性质分析:本课程为数学学科的教学内容,以实际问题为背景,通过引入变尺度法,培养学生运用数学知识解决实际问题的能力。
学生特点分析:考虑到学生所在年级的特点,他们对数学基础知识和基本技能已有一定掌握,具备初步的问题分析和解决能力,但对复杂问题仍需指导。
教学要求:1. 教学内容与课本紧密关联,注重培养学生的实际操作能力。
2. 教学过程中,关注学生的个体差异,提供有针对性的指导。
3. 教学评价以学生的实际操作和解决问题能力为主要标准,关注学生在学习过程中的成长和进步。
二、教学内容本章节教学内容主要包括以下三个方面:1. 变尺度法基本概念- 引导学生理解变尺度法的定义,掌握其基本原理。
- 介绍变尺度法在数学和物理学中的应用。
2. 变尺度法的应用实例- 通过具体案例,讲解如何运用变尺度法解决实际问题。
- 分析案例中变尺度法的操作步骤,引导学生学会在实际问题中运用。
教材章节:第三章第五节“变尺度法及其应用”3. 变尺度法实践操作- 布置具有代表性的练习题,让学生动手操作,巩固所学知识。
- 组织学生进行小组讨论,共同解决实践操作中遇到的问题。
教材章节:第三章第六节“变尺度法的实践与应用”教学内容安排与进度:第一课时:导入变尺度法基本概念,介绍其在数学和物理学中的应用。
§3.5 变尺度法DEF 变尺度法: 1. 变尺度的定义:每确定一次搜索方向,调整一次模(尺度)的大小,称为变尺度。
2. 基本思想:发扬梯度法和牛顿法各自的优点,避免两者各自的缺点,将两者结合起来,形成变尺度法。
3. 变尺度矩阵的构造:原则:使目标函数值有下降性,则变尺度矩阵应为实对称矩阵(请证明); 使算法有二次收敛性,则 S(k) (k=1,2,…)应关于 H(k) 是共轭的;构造变尺度矩阵的递推公式:4. 修正矩阵:了牛顿法的优点。
矩阵的逆矩阵,而利用及这样避免计算二阶导数即为牛顿法。
最终迭代时,时接近当不断修正尺度,逼近,中间的迭代即为梯度法,,首次迭代时,为拟牛顿方向。
的矩阵一个为变尺度矩阵,是:其中:迭代公式Hesse x f x H S x f x H S x H H x x x H H x f S I H x f H S n n H x f H x x k K k k K k K k k k k k k k k k k k k k k k ,)()]([,,)()]([,)]([*,)]([,)(,)(][,),(][)(1)()()(1)()(1)()()(1)()()()()0()()()()()()()()()1(∇-=∇-→→-∇==∇-=⨯∇-=----+α。
即:件)变尺度条件(拟牛顿条)()]()([,)()1()()1()1()()()1(k k k k k k k k x x x f x f Hx g H -=∇-∇∆=∆⋅∙++++次迭代时的修正矩阵。
为第其中:k E E H H k k k k )()()()1(,+=+5.步骤:(略)6. 方法评价:DEF 变尺度法以逐次逼近的方法实现 H-1 的计算,当目标函数的一阶导数易求时,以一阶代替二阶导数的计算是有效的方法。
算法的第一步是梯度法,最速下降;接近 x* 时,又采用二次收敛的共轭方向,总的收敛速度较快。
约束变尺度法Newton 法最突出的优点是收敛速度快,在这一点上其它算法无法比拟的。
因此,建议凡是Hesse 矩阵比较容易求出的问题,尽可能使用Newton 法求解。
但是,Newton 法也有一个严重缺陷,就是每次迭代都要计算目标函数的Hesse 矩阵和它的逆矩阵,当问题的维数较大时,计算量迅速增加,从而就抵消了Newton 法的优点。
为此,人们开始寻找一种算法既可以保持Newton 法收敛速度快的优点,又可以摆脱关于Hesse 矩阵的计算,这就是变尺度算法。
变尺度法是一种非常好的方法,其中DFP 算法和BFGS 算法。
可以说,直到目前为止,在不用Hesse 矩阵的方法中是最好的算法。
一、拟Newton 法为了吸收Newton 法收敛速度快的优点,同时避免Newton 法每次迭代都要计算目标函数的Hesse 矩阵和它的逆矩阵,人们提出了具有超线性收敛的拟Newton 法。
(一)拟Newton 法的基本原理在Newton 法中的基本迭代公式kk k k P t X X +=+1,其中1=k t ,)()]([12kkk Xf Xf P ∇∇-=-令)()(2kkkkXf gXf G∇=∇=,于是有,,,,21011=-=-+k g G X X k k k k其中X0是初始点, gk 和 Gk 分别是目标函数f (X )在点 Xk 的梯度和Hesse 矩阵.为了消除这个迭代公式中的Hesse 逆矩阵G-1k ,可用某种近似矩阵Hk=Hk(Xk)来替换它,即构造一矩阵序列{Hk}去逼近Hesse 逆矩阵序列{G-1k},此时kk k k g H X X -=+1事实上,式中 Pk= -Hk gk 无非是确定了第k 次迭代的搜索方向.为了取得更大的灵活性,考虑更一般的迭代公式kk k k k g H t X X -=+1其中步长tk 通过从Xk 出发沿Pk= -Hk gk 作直线搜索来确定.此式代表很广的一类迭代公式.例如,当Hk=I (单位矩阵)时,它变为最速下降法的迭代公式。
附加条件为了使Hk 确实与G-1k 近似并有容易计算的特点,必须对 Hk 附加某些条件:⑴ 为保证迭代公式具有下降性质,要求 {Hk} 中的每一个矩阵都是对称正定的.因为使搜索方向Pk= -Hk gk 是下降方向, 只要<-=k k Tk k T k g H g P g⑵ 求Hk 之间的迭代具有简单形式.可设为最简单的形式:kk k E H H +=+1其中 Ek 称为校正矩阵,此式称为校正公式.⑶ {Hk}必须满足拟Newton 条件.(二)拟Newton 法的算法构造已知目标函数f (X )及其梯度 g(X ),终止限ε。
Step 1 选定初始点X0;计算 f0=f(X0),g0=g(X0),选定初始矩阵 H0,要求 H0 对称正定(例如, H0=I),置k=0. Step 2 计算搜索方向kk k g H P -=.Step 3 作直线搜索),(1k k k P X ls X =+.计算111111(),(),,k k k k k k k k k kf f Xg g X S X X y g g ++++++===-==.Step 4 判别终止准则是否满足.若满足,则Xk+1就是所求的极小点,否则转Step 5.Step 5 计算kk k E H H +=+1.Step 6 k=k+1,转Step 2 .其中校正矩阵Ek 可由确定的公式来计算.不同的公式对应不同的拟Newton 算法.(三)拟Newton 算法的流程图k =k +1f 0=f (X 0),g 0=g (X 0)开始结束选定X 0,对称正定阵H 0,置k=0X k+1YH 准则满足Nkk k g H P -=),(1k k k P X ls X =+111111(),(),,k k k k k k k k k kf f Xg g X S X X y g g ++++++===-==kk k E H H +=+1二、DFP 变尺度法DFP 算法首先由Davidon 1959年提出,1963年, Fletcher 和Powell 作了改进,形成DFP 算法.D,F,P 是这三位学者名字的字头.这种算法是无约束最优化方法最有效的方法之一.(一)DFP 算法的基本原理考虑校正公式:Tk k k Tk k k k k V V U U H H βα++=+1其中Uk,Vk 是待定n 维向量,αk,βk 是待定常数.这时,校正矩阵是Tk k k T k k k k V V U U E βα+=根据拟Newton 条件kk k k T k k k Tk k k y H S y V V U U -=+)(βα或kk k k T k k k k Tk k k y H S y V V y U U -=+βα满足这个方程的Uk,Vk 有无穷多种取法, 其中的一种:T k k k k kU U y S α=,T k k k k k kV V y H y β=-注意到kTk y U 和kT k y V 都是数量,k k k k k U S V H y ==,不妨取 , 可取 1/),1/()T Tk k k k k k k S y y H y αβ==-(得kk Tk kTk k k k T k T k k kk y H y H y y H y S S S HH-+=+1这就是DFP 校正公式(二)DFP 算法的算法构造已知目标函数f (X )及其梯度 g(X ),问题的维数n,终止限ε Step 1 选定初始点.计算 0000(),()f f Xg g X ==Step 2 置000,,0H I P g k ==-=.Step 3作直线搜索),(1k k k P X ls X =+1111()()k k k k f f X g g X ++++==,计算Step 4 判别终止准则满足否. Step 5 若k=n,则置010101k k k X X f f g g +++===,,Step 6 计算1k k k S X X +=-,1k k ky g g +=-1T Tk k k k k kk k T Tk k k k kS S H y y H H H S y y H y +=+-,111k k k P H g +++=-置k=k+1,转Step 3.(三)DFP 算法的流程图k =k +1置H 0=I ,k=0,P 0=-g 0开始选定X 0, f 0=f (X 0),g 0=g (X 0)X k+1Y H 准则满足N),(1k k k P X ls X =+1111(),()k k k k f f X g g X ++++==11,k k k k k k S X X y g g ++=-==1T T k k k k k kk k T Tk k k k kS S H y y H H H S y y H y +=+-111k k k P H g +++=-k =n N结束令X 0=X n +10101k k f f g g ++==,Y三、BFGS 变尺度法另一个有效和著名的变尺度算法是Broyden, Fletcher(1970), Goldfarb(1969)和Shanno(1970)共同研究的结果,因而叫做BFGS 法.(一)BFGS 算法的基本原理考虑校正公式Tk k k k Tk k T k kk T k k T k k k k T k T k k k k W W y H y S y y H y H y y H S y S S H H ))((1β+-+=+其中,kk Tk kk k T k k k y H y y H S y S W -=校正矩阵为Tk k k k Tk k T k kk T k k Tk k k k T k T k k k W W y H y S y y H y H y y H S y S S E ))((β+-=β为实数参数, 每取一个实数就对应一种拟Newton 算法. 当取β=0时就是DFP 校正公式 令1/()T k k S y β=得著名的DFGS 校正公式⎥⎥⎦⎤⎢⎢⎣⎡--⎪⎪⎭⎫ ⎝⎛++=+k T k k T k k k T kk k Tk kk T k kTk k k H y S S y H S S y S y H y y S H H 111(二)DFGS 算法迭代步骤已知目标函数f (X )及其梯度g (X ),问题的维数n,终止限ε. Step 1 选取初始点X0,初始矩阵 H0=I,给定终止限 ε>0.Step 2 求初始梯度 f (X0).若|| f (X0)||≤ε,停止输出X0;否则. Step 3 构造初始BFGS 方向,取0000()(),0P H f X f X k =-∇=-∇=.Step 4 进行一维搜索,求tk,使得11(,),k k k k k k kX ls X P X X t P ++==+.Step 5 求梯度 f (Xk+1).若|| f (Xk+1)||≤ ε,停止输出Xk+1;否则. Step 6 检验迭代次数,若k+1=n,令X0=Xn 转(3);否则. Step 7 构造BFGS 方向,用BFGS 公式⎥⎥⎦⎤⎢⎢⎣⎡--⎪⎪⎭⎫ ⎝⎛++=+k T k k T k k k T kk k Tk kk T k kTk k k H y S S y H S S y S y H y y S H H 111计算,取,令1111,(),1k k k k H P H f X k k ++++=-∇=+转Step 4.(三)DFGS 算法的流程图结束开始计算∇f (X 0)给定X 0, H 0=I , ε>0计算∇f (X k +1)Xk+1取0000()(),0P H f X f X k =-∇=-∇=求t k 使),(1k k k P X ls X =+)(111+++∇-=k k k X f H P 1+=k k ||∇f (X 0)||≤εN||∇f (X k +1)||≤ εNk +1=n NX 0YY 令X 0=X nY四、变尺度法的算法分析Newton 法每次迭代都要计算目标函数的Hesse 矩阵和它的逆矩阵,当问题的维数较大时,计算量迅速增加,从而就抵消了Newton 法收敛速度快的优点。
而变尺度算法则可以保持Newton 法收敛速度快的优点,又可以摆脱关于Hesse 矩阵的计算。
变尺度法中的二个重要算法DFP 算法和BFGS 算法迭代过程相同,区别仅在于校正矩阵Ek 选取不同,对于DFP 法,由于一维搜索的不精确和计算误差的积累可能导致某一轮的Hk奇异,而BFGS法对一维搜索的精度要求不高,并且由它产生的 Hk不易变为奇异矩阵.BFGS法比DFP法更具有好的数值稳定性,它比DFP 法更具有实用性.。