交通状态判别
一、案例背景介绍
随着机动车保有量的不断上升,城市的快速发展在促进经济繁荣、社会进步的同时,也不可避免的带来了交通拥堵问题。
在交通发展的过程当中,交通拥堵是诸多问题中产生频率最高、影响最大、持续时间最长的一个。交通拥堵增加了人们上下班的时间代价和精神压力,降低了城市运行效率,还给国民经济带来不可估量的经济损失。
交通拥堵的产生从表面看是由城市现有的路网资源与实际的出行需求之间的矛盾导致,而根本原因是城市路网规划不合理,与城市当前发展之间的失衡造成路网负荷增加、交通运行稳定性下降。
为了实现对交通秩序的实时监测和控制,城市道路和高速公路两侧布置了大量的交通数据检测器,每天可以产生千万级别的数据。这些交通数据体量巨大、数据结构多种多样、价值丰富却又密度低,具有大数据的典型特征。近年来,针对这些海量的交通数据如何建立有效的分析和处理流程,从中挖掘出有价值的信息,成为智能交通系统的重点研究方向。
二、多模型建模理论
多模型建模方法就是对训练数据建立多个子模型,把子模型对测试数据的分析通过某种方法结合,形成最后的分析结果。单模型结构是对非线性系统建立数学模型时的最基本方法,一般先对样本数据使用不同的理论建立一系列不同的模型,从中选择性能最优或次优的模型参与实际的应用。对于复杂的非线性系统,单模型是一种整体上的近似解。Bates和Granger于1969年首次提出将多个数学模型连接以提高模型的预测能力、提高系统鲁棒性的方法,自此以后多模型建模方法在时间序列分析、状态预测估计、化工预警控制等多个领域得到广泛的研究和应用。
在模型的训练过程中,通常需要收集较多的样本数据以保证神经网络对实际生产过程的充分反映。如果样本规模较大,神经网络的结构比较庞大、训练时间加长,实际训练中先对样本聚类分析得到规模较小的子集,理论上每个样本子集的学习速度将会加快且网络结构更加紧凑,总时间也会降低。另外,当样本数目较大时,部分数据在距离意义上相邻较近,对应的输出在距离意义上却较远,这样的样本虽然仍可以使用单个神经网络学习,但是学习之后模型的泛化能力较差。这是将学习样本空间进行分解的主要原因。
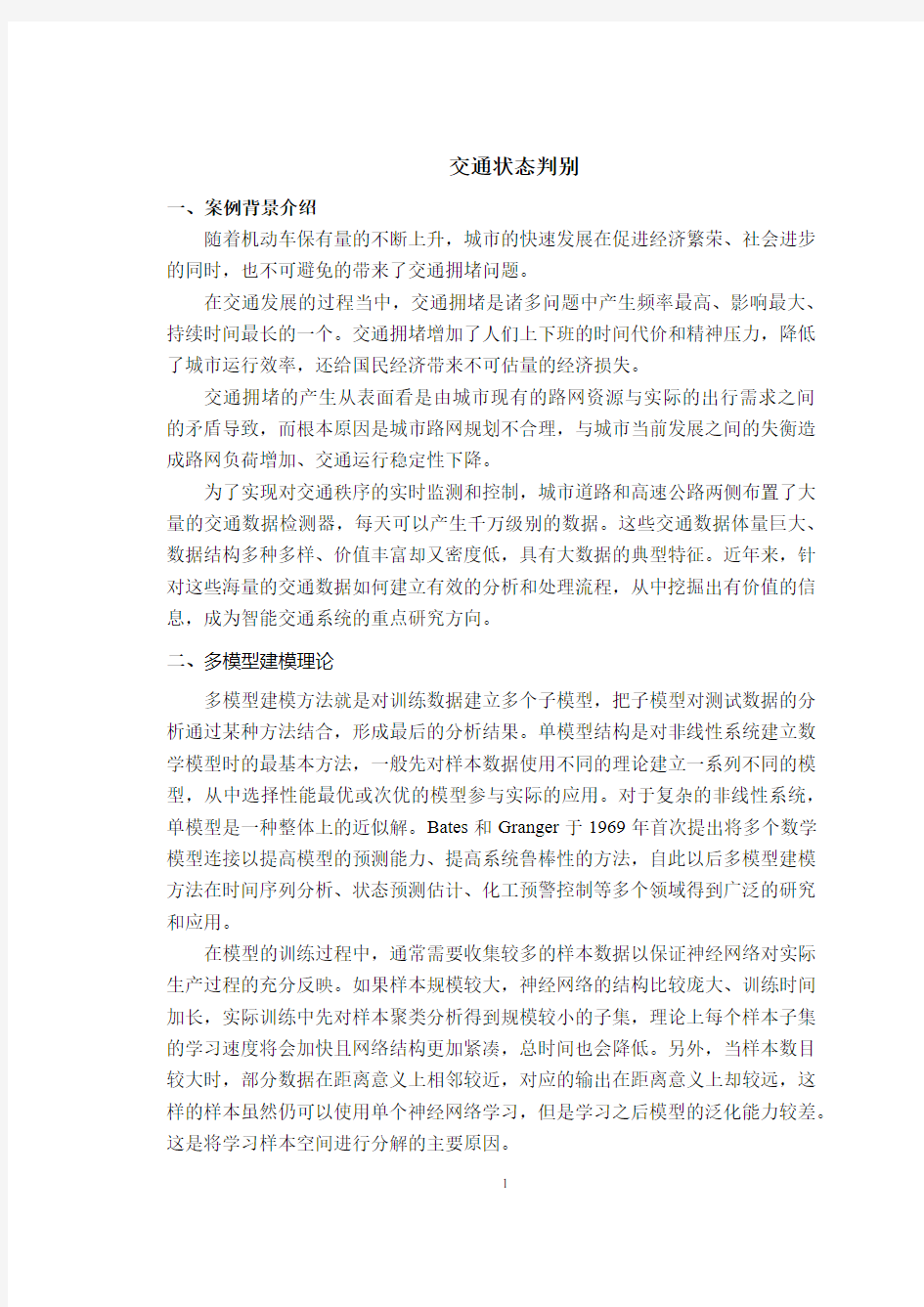
多模型建模时一般使用加权或非加权两种策略获得最后的输出结果,其基本结构如图1、图2所示:
图1基于加权策略的多模型算法基本结构图
在图1中,1y 、2y ······n y 代表每个子模型的输出,1w 、2w ······n w 代表每个子
模型输出在多模型最终的结果输出中所占的权重。
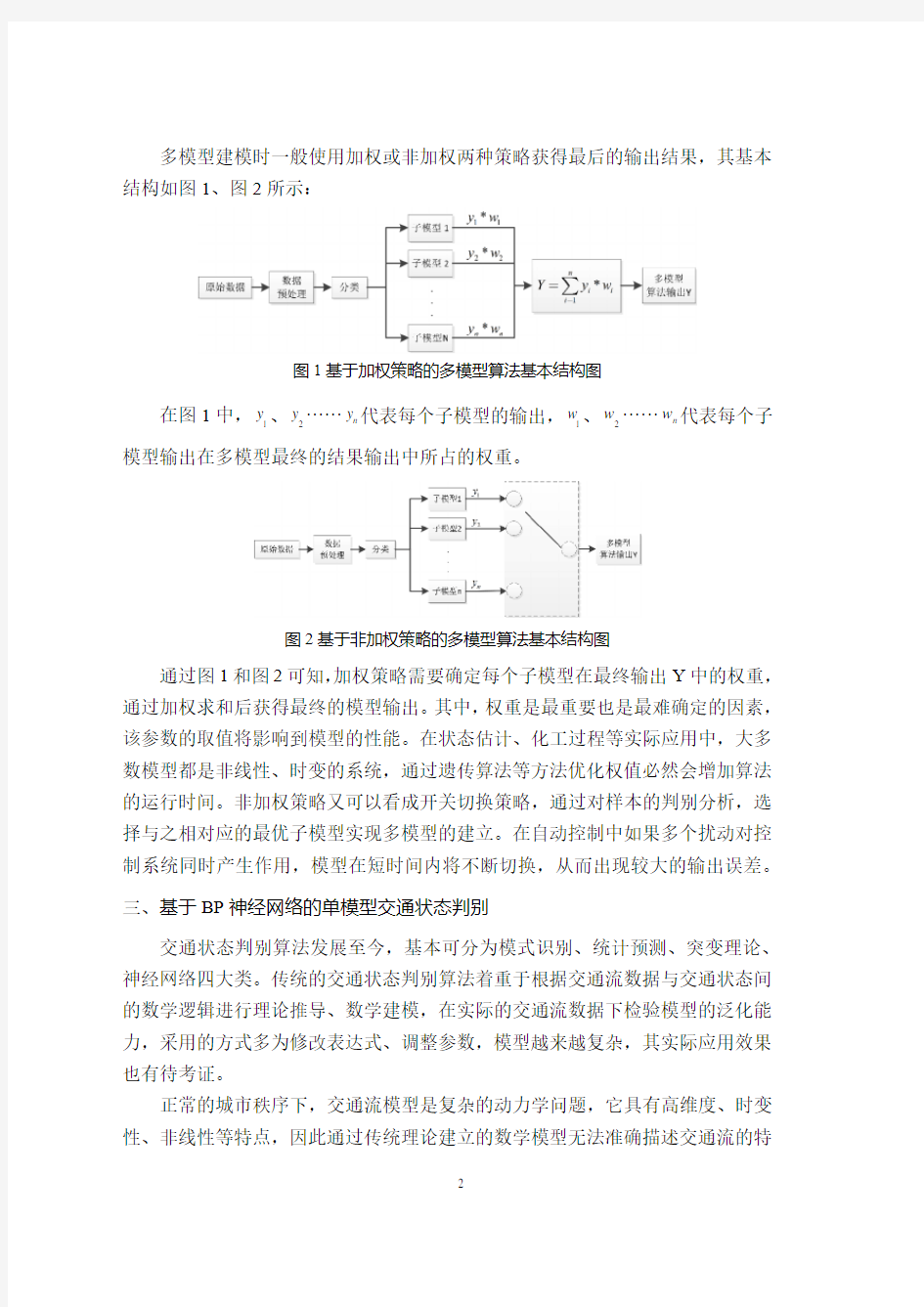
图2基于非加权策略的多模型算法基本结构图
通过图1和图2可知,加权策略需要确定每个子模型在最终输出Y 中的权重,通过加权求和后获得最终的模型输出。其中,权重是最重要也是最难确定的因素,该参数的取值将影响到模型的性能。在状态估计、化工过程等实际应用中,大多数模型都是非线性、时变的系统,通过遗传算法等方法优化权值必然会增加算法的运行时间。非加权策略又可以看成开关切换策略,通过对样本的判别分析,选择与之相对应的最优子模型实现多模型的建立。在自动控制中如果多个扰动对控制系统同时产生作用,模型在短时间内将不断切换,从而出现较大的输出误差。
三、基于BP 神经网络的单模型交通状态判别
交通状态判别算法发展至今,基本可分为模式识别、统计预测、突变理论、神经网络四大类。传统的交通状态判别算法着重于根据交通流数据与交通状态间的数学逻辑进行理论推导、数学建模,在实际的交通流数据下检验模型的泛化能力,采用的方式多为修改表达式、调整参数,模型越来越复杂,其实际应用效果也有待考证。
正常的城市秩序下,交通流模型是复杂的动力学问题,它具有高维度、时变性、非线性等特点,因此通过传统理论建立的数学模型无法准确描述交通流的特
性。相比而言,神经网络是对人脑或自然神经网络的若干基本特性的抽象和模拟,是以计算机网络系统模拟生物神经网络的智能计算系统,它有着较强的自我学习能力。作为一个黑箱模型,神经网络描述了将输入矢量转换为输出矢量的过程,可以在最大程度上获得不同交通状态下的交通流的近似特性。在训练时神经网络只需要确定训练样本的格式和内部结构的各项参数即可,例如权重、神经网络结构等等。本节应用BP神经网络实现对城市道路交通状态判别的单模型分析研究,并在不同路段的交通流数据下进行分析。
以速度、流量、占有率三个交通流参数作为输入数据,以交通状态(分为“拥堵”、“缓行”、“畅通”三个等级)作为输出。算法步骤如下:
STEP1:输入数据;
STEP2:确定训练集、测试集
STEP3:训练数据归一化;
STEP4:网络初始化,主要包括网络结构、权值、误差;
STEP5:计算隐含层、输出层输出;
STEP6:计算隐含层、输出层误差;
STEP7:修正隐含层、输出层的权值、阈值;
STEP8:判断误差是否小于ε:是,训练结束,执行下一步;否,更新训练总步数后,跳转到STEP5;
STEP9:测试数据归一化;
STEP10:计算隐含层输出、输出层输出;
STEP11:对分类结果统计,计算误差;
STEP12:计算正确率,结束程序。
表1给出了不同结构的BP神经网络对交通状态的判别结果,其中神经元结构一栏中,[ ]中的数字代表神经网络的结构,例如“[2 3]”代表该神经网络有两个隐含层,其中第一个隐含层有2个神经元,第二个隐含层有3个神经元。测试结果均是在同一个数据集上反复测试获得。路段A参与整个神经网络学习过程的交通流数据共有650个,训练数据520个、测试数据130个;路段B参与整个神经网络学习过程的交通流数据一共1560个,其中训练数据1248个,测试数据312个,两个路段的训练数据与测试数据的比例均为4:1。
表1不同结构的BP神经网络的交通状态判别结果
神经网络结构
路段A路段B
正确率运行时间(s)正确率运行时间
[1]0.82 3.480.80 4.05
[2]0.83 3.250.82 4.15
[3]0.78 3.270.81 3.98
[4]0.79 3.450.82 4.3
[1 1]0.81 3.330.81 3.83
[1 2]0.80 4.180.82 4.09
[1 3]0.78 3.280.81 3.96
[2 1]0.83 3.370.82 3.98
[2 2]0.82 3.510.80 3.83
[2 3]0.82 4.530.81 4.09
[3 1]0.79 4.160.80 4.23
[3 2]0.81 3.90.84 4.01
[3 3]0.80 4.020.81 4.32
通过对上述表格的分析可知,对于同一个路段,采取不同结构的神经网络有着不一样的结果,而对于不同路段,当模型的判别准确率最高时,其神经网络的结构和参数也是不一样的。仅从准确率来看,对于路段A,神经网络的节点数结构为[2]或者节点数结构为[2 1]时性能最好,准确率可以达到83%;而对于路段B,神经网络的节点数结构为[3 2]时,神经网络的准确率可以达到84%。同时,数据集的大小也会影响神经网络的准确率,当参与训练的数据集较大时,神经网络可以更加充分的学习模型,整体准确率相对较高。对于运行时间,0.1s和1s在人体感官上没有太大的区别,暂时不予考虑。
图3交通状态判别结果(上:路段A;下:路段B)
在图3中,横坐标代表测试数据的序号,纵坐标代表测试数据的交通状态,绿色圆圈代表算法判断状态,红色星号代表道路实际状态。由前面所述可知,具有适宜结构的BP神经网络对于道路交通状态判别的正确率可以达到80%。神经网络不需要人为建立交通状态判别的数学模型,不需要关注不同交通状态下的交通流各自有什么特点,只需要确定学习样本的数据格式和人工神经网络的结构等
参数,就可以进行自动学习、对系统进行拟合。
但是人工神经网络也有着自己的局限性,人工神经网络的各个结构参数不能与实际的非线性系统内的结构一一对应,这极大的影响了神经网络的适用范围。同时,训练数据和样本数据的选择使神经网络不可避免的陷入欠拟合和过拟合的问题中,如果测试数据在训练数据的样本范围之内或者相近时,运算结果是良好的;如果测试数据分布与训练数据相差较远时,模型输出将会有较大的偏差。这也是尽可能增加样本规模的原因,数据的广泛采集可以使样本具有代表性,可以使神经网络更加有效的表达模型。
下面将通过实现多模型算法提高交通状态判别的准确率。
四、基于模糊C均值聚类的多模型交通状态判别
随着城市交通的发展,每天产生千万级的过车数据。在这样的大数据环境下,单一模型难以描述复杂的交通流环境,而80%的判别率也会产生大量的误判,引起城市交通秩序的混乱,因此,当前环境急需提高交通状态判别的准确率,减少误判的发生。
交通状态判别不是简单的多分类问题,实质上是某一分类器进行学习训练有着不同标签的交通流数据,对于测试数据进行不同交通状态等级的逻辑判断过程。三个交通状态之间没有特别明确的界限,而是模糊的关系。给定一组交通流数据,经过特定的数据挖掘算法的分析和判断,给出的结论应当是属于畅通的可能性是多少,属于拥堵的可能性是多少,因此,应用模糊C均值具有一定的理论意义和实际意义。
本节结合模糊C均值和BP神经网络,以多模型理论为基础设计了一种新的交通状态判别算法。第一步使用模糊C均值(FCM)聚类算法,将训练数据进行聚类分析得到样本子集,将这些子集作为模型训练时的输入,且以每一类数据的聚类中心作为该类的中心向量;第二步建立具有差异性的BP神经网络模型,对每一类样本子集进行训练,依据正确率选择最佳模型;第三步输入测试数据,计算测试数据与中心向量的距离,根据该距离选择对应的子模型。
本文使用非加权策略建立多模型算法,并在实测数据上进行仿真研究。本文使用的多模型非加权结构的算法如下:
(1)首先对所取的样本数据进行异常数据剔除、数据标准化等数据预处理;
(2)使用模糊聚类方法对于样本数据进行聚类,产生了不同的类别数据组;
(3)对于每个类别数据分别采用不同结构的BP神经网络,依据正确率选取性能最优的模型作为该类数据的分类模型;
(4)建立数据样本的类别判断模块,对样本进行分析,并根据结果选择相应的分类模型进行输出预测。
在类别判断模块,模糊C均值已计算出各个类别的聚类中心,通过计算样本与聚类中心的距离确定样本数据的类别,距离公式使用欧氏距离:
(,)
d x y=(1)
其中,n=3,与交通流数据的参数个数相同。
本节设计的多模型算法流程如下:
图4多模型非加权算法的流程图(上:训练流程;下:测试流程)为了说明论文采用的多模型非加权算法在交通状态判别中的可行性,多模型算法采用的数据仍然是来源于路段A和路段B的交通流数据。论文在多模型算法的仿真过程中,使用最小-最大规范化方法对样本数据进行规范化操作。训练时,首先对训练数据聚为两类,再建立各自的神经网络进行训练。
在确定训练数据与测试数据时随机选择的方法使它们与样本数据的统计分布不一致,为了最大程度的保证一致性,我们先对路段的样本数据进行模糊聚类,根据聚类后两类数据的比例确定训练数据集与测试数据集。在此,本文设定两个路段的训练数据与测试数据比例均为4:1,数据分配比例如表2、表3所示。
表2路段A数据比例
类别1类别2合计
训练数据346174520
测试数据8743130
合计433217650
表3路段B数据比例
类别1类别2合计
训练数据5457031248
测试数据136176312
合计6818791560
练数据与测试数据的“合计”一项代表训练数据与样本数据的规模大小,类别1、类别2的“合计”一项代表样本数据经聚类后每个类别的样本数量。
对训练数据使用模糊C均值算法进行聚类分析,图5是训练数据的原始散点图,图6是聚类散点图。
图5路段A的原始散点图和聚类散点图
图6 路段B的原始散点图和聚类散点图
对于FCM算法运行后的聚类结果,分类模型采用不同结构的BP神经网络模型对某一类数据进行分析判别以判断准确率高为依据进行模型选择。
图7路段A的状态判别结果(上:类别1;下:类别2)使用欧式距离对两条路段的测试数据进行类别判断。对于路段A的第1类数据,当BP神经网络采用两个隐含层、第一层3个神经元、第二层2个神经元时,神经网络的训练效果最好,该类别的正确率为89.4%。对于路段A的第2类数据,当BP神经网络采用两层隐含层、第一层2个神经元、第二层1个神经元时,神经网络的训练效果最好,该类别的正确率为87.5%。
图8路段B的状态判别结果(上:类别1;下:类别2)
对路段B的测试数据使用欧式距离进行类别判断。对于路段B的第1类数据,当BP神经网络采用两层隐含层、第一层2个神经元、第二层2个神经元时,神经网络的训练效果最好,该类别的正确率为89.3%。对于路段B的第2类数据,当BP神经网络采用两层隐含层、第一层3个神经元、第二层1个神经元时,神经网络的训练效果最好,该类别的判别正确率为92.8%。
综合来看,基于模糊C均值的多模型算法对于交通状态判别的应用优势突出,路段A的判别正确率可以达到88.5%,而路段B的判别正确率可以达到91.7%。
第一章绪论 1.1 研究背景 1.1.1问题的提出 改革开放以来,随着我国现代化、城市化进程的加速,交通拥挤问题也逐渐产生并日益严重。近20年,内地民用汽车年平均增长率为13.3%,私人汽车年平均增长率高达23.7% 。其中,北京作为人口超过2000万人、机动车500万辆的特大城市,交通拥堵已成为制约城市发展的主要问题,2010年10月的美国《外交政策》一书更是将北京列为世界五大拥堵城市之首。 城市交通拥挤已严重阻碍中国城市经济及空间布局结构的良性发展,在社会各个方面造成负面效应,具体表征为时间延误、能源浪费、大气污染及情绪影响等。这些负面效应使得社会外部成本增高,危害了人类的经济利益和健康安全,更不符合建设和谐交通的目的。 因此,从科学的角度对城市道路拥挤的根本原因进行深入分析显得格外重要。这不是单纯地统一增加道路基础设施建设、扩大路网规模来满足不断增长的交通需求量,而是通过拥挤识别确定城市不同道路的拥挤度来实施不同的解决措施。建立完善的、符合我国国情的交通拥挤识别体系并合理运用成为当务之急。 1.1.2 研究意义 我国是一个人口众多的发展中国家。自1991年以来,我国的经济发展速度持续超过10%,而持续的经济增长使得人民对交通的需求扩大。汽车产量增大,人民的购买力上升,人民的配车率提高,私人小汽车的数量快速增长,城市的交通需求与交通供给出现了不平衡状况,导致了城市尤其是大城市严峻的交通拥挤问题。因此,此次研究的目的就是通过分析交通指挥中心的固定检测器采集和实地考察的交通数据,在交通拥挤识别体系下,计算出有效的道路实时动态交通信息,根据获取的数据信息实时、准确地为管理者制定合理有效的交通拥挤疏导策略。
交通道路标志牌检测与识别综述 一、背景综述 随着社会科技不断发展和进步,车辆已经普及到国内大部分家庭。汽车的普及极大方便了人们的出行、生活和工作,同时也不可避免的产生了很多的交通问题。据公安部交通管理局统计,2014年1月至10月,全国共发生道路交通事故426378起,造成87218人死亡、391752人受伤,直接财产损失20.2亿元。交通安全问题成为人们日常生活中最常见的问题之一,受到了政府、科研机构以及汽车生产厂家的高度重视。 解决交通安全问题的途径之一是准确、有效地设立道路交通标志,为驾驶员提供丰富的禁令、警告、指示等信息,从而起到减少交通事故的作用。为了确保交通标志的信息能够及时、准确地传达,交通标志自动识别系统(Traffic Sign Recognition,TSR)受到了各国学者的关注,其主要功能表现在以下几个方面: (1)用于驾驶辅助。交通标志识别的概念最早就是作为驾驶辅助工具被提出的。TSR系统在识别出交通标志后,可对驾驶员进行语音或视频等方式的提醒,甚至可以在必要的时候对车辆驾驶系统直接做出控制,从而确保驾驶安全。 (2)用于交通标志维护。由于交通标志通常放置于室外环境中,受自然环境(如风吹雨淋)及人为因素(如涂抹)影响,难免出现褪色、变形甚至坠落失踪现象,需要进行定期检查维护。通常,这一工作需安排专人专岗,工作量巨大且很难保证实时性和准确性。显然,一个有效的TSR系统是完成这一工作的理想方案。 (3)用于无人驾驶技术。无人驾驶汽车在近年来受到了越来越多的关注。从上世纪90年代起,国内外相继研发出了一系列无人驾驶汽车,其智能化逐渐提高,能够自动规划路线,避让障碍物等。使无人驾驶汽车具备辨认交通标志的能力显然是使其实用化的一个重要步骤。 TSR在计算机领域中是一个非常重要的分支研究领域,而图像检测以及处理是其主要手段,这是一个难度比较大的实景图形识别问题。在车载视觉系统中,如何有效地识别道路交通标志是一个非常重要的研究课题。 TSR包括三个重要模块:图像复原、标志检测、标志分类。交通标志的外观
城市道路交通拥堵状态的动态综合评价及对策研究 (可行性研究报告) 一、项目实施的背景和意义 近年来,随着国民经济的快速增长,人流、物流、信息流以前所未有的密度涌向大中城市并向周边辐射,城市化进程明显加快,城市规模不断扩大,人口不断集中。统计资料显示:超过百万人口的大城市数量从1978年的13个增加到2010年的42个,目前城市化水平已经达到50%。此种状态在带动城市交通需求高速增长,机动车辆快速增加的同时,也促使城市道路负荷加重,交通拥堵现象日益加剧[1]。交通拥堵使交通延误增大,行车速度降低、时间损失、燃料费用增加、排污量增大、城市环境恶化、并诱发交通事故,直接影响人们的工作效率和身体健康[2]。 当前,城市道路交通拥堵已经成为阻碍城市快速健康发展的焦点问题之一,其所造成的经济、安全和环境等方面的重大损失已引起社会各方的广泛关注。例如,北京市城市干道平均车速比十年前降低50%以上,市区183个主要交叉口中,严重阻塞的达到60%;上海市中心区高峰期的道路平均车速不到20km/h[3]。同时各大城市交通拥堵日趋严重,并且开始由城市中心区向郊区蔓延;中小城市也普遍出现了交通拥挤现象。以金华市为例,近年来在经济日渐活跃、城市日益繁荣的同时,也被城市交通拥堵问题所困绕。“十一五”以来,金华市区域经济一直保持高速增长,但城市用地状况的改变与常住人口的迅速增加,城市客货交通行为发生了很大变化,机动车拥有量近年来一直保持着两位数以上的高位增长,南来北往繁忙的交通使得原先通畅的出行环境日趋恶化,且由此产生的尾气和噪声污染不断加剧,严重影响了金华作为全国十大宜居城市的社会声誉。事实上,城市交通拥堵不仅是我国发展中遇到的问题,也是世界各国需要共同面对的难题。美国德州运输研究所对美国39个主要城市进行研究后,估计美国每年因交通堵塞而造成的经济损失约为410亿美元,12个最大城市每年的损失均超过10亿美元;日本估计东京每年因交通拥堵造成的交通参与者的时间损失相当于123000亿日元;欧洲每年因交通拥堵和环境污染造成的经济损失分别为5000亿欧元和50~500亿欧元[4]。 为了缓解城市交通拥堵,各城市对交通基础设施投资不断加大,但交通拥堵问题并没有得到明显缓解,城市交通需求与交通供给之间的矛盾日趋尖锐,道路交通拥堵现象越发严重。一般情况下,城市交通拥堵的现象都是一致的,表现为车辆在交叉口、路段或一定区域的超出正常时间的滞留,但是城市交通拥堵的原因却涉及到经济发展、交通技术、交通政策、交通方式、道路网络等不同方面的问题[5]。为了从交通拥堵发生的根源上找到缓解、控制城市交通拥堵,保持城市交通畅通的有效方法,国内外学者结合本国国情及区域特色,针对城市道路交通拥堵情况进行了广泛研究。欧美许多发达国家从二十世纪五十年代便开
城市道路交通状态评价指标体系
第一章绪论 1.1 研究背景 1.1.1问题的提出 改革开放以来,随着中国现代化、城市化进程的加速,交通拥挤问题也逐渐产生并日益严重。近20年,内地民用汽车年平均增长率为13.3%,私人汽车年平均增长率高达23.7% 。其中,北京作为人口超过万人、机动车500万辆的特大城市,交通拥堵已成为制约城市发展的主要问题,10月的美国《外交政策》一书更是将北京列为世界五大拥堵城市之首。 城市交通拥挤已严重阻碍中国城市经济及空间布局结构的良性发展,在社会各个方面造成负面效应,具体表征为时间延误、能源浪费、大气污染及情绪影响等。这些负面效应使得社会外部成本增高,危害了人类的经济利益和健康安全,更不符合建设和谐交通的目的。 因此,从科学的角度对城市道路拥挤的根本原因进行深入分析显得格外重要。这不是单纯地统一增加道路基础设施建设、扩大路网规模来满足不断增长的交通需求量,而是经过拥挤识别确定城市不同道路的拥挤度来实施不同的解决措施。建立完善的、符合中国国情的交通拥挤识别体系并合理运用成为当务之急。
1.1.2 研究意义 中国是一个人口众多的发展中国家。自1991年以来,中国的经济发展速度持续超过10%,而持续的经济增长使得人民对交通的需求扩大。汽车产量增大,人民的购买力上升,人民的配车率提高,私人小汽车的数量快速增长,城市的交通需求与交通供给出现了不平衡状况,导致了城市特别是大城市严峻的交通拥挤问题。因此,此次研究的目的就是经过分析交通指挥中心的固定检测器采集和实地考察的交通数据,在交通拥挤识别体系下,计算出有效的道路实时动态交通信息,根据获取的数据信息实时、准确地为管理者制定合理有效的交通拥挤疏导策略。 1.2国内外研究现状 1.2.1拥挤识别研究现状 到当前为止,国内外对很多学者研究开发了许多的 ACI 算法。 加利福尼亚算法。经过比较邻近检测站之间的交通参数数据,对可能存在的突发交通事件进行判别,由此确定交通拥挤的发生。此算法于 1965-1970 年间,由加利福尼亚洲运输部开发。 McMaster 算法。该算法由Persaud et al(1990)根据突变理论开发出来。它使用大量的拥挤和非拥挤交通状态下的流量-占有率历史数据,开发一个流量-占有率分布关系模板,经过将观测数据之
交通标志的智能检测方法研究 作者:高向东, 刘红, 杨大鹏 作者单位:郑州大学机械工程学院,河南,郑州,450001 刊名: 中外公路 英文刊名:JOURNAL OF CHINA & FOREIGN HIGHWAY 年,卷(期):2011,31(2) 参考文献(9条) 1.胡小锋;赵辉Visual C++/MATLAB图像处理与识别实用案例精选 2004 2.李学明基于Retinex理论的图像增强算法[期刊论文]-计算机应用 2005(02) 3.RAHMAN Z;JOBSON D J Image Enhancement,Image Quality,and Noise 2005 4.Jobson D J;Rahman Z U;Woodell G A Properties and Performance of a Center/Surround Retinex[外文期刊] 1997(03) 5.房少梅;郭昌洪;吴沛基于多尺度Retinex理论的彩色图像增强算法[期刊论文]-吉首大学学报 2009(04) 6.Edwin Land The Retinex Theory of Color Vision 1977 7.A.R.Smith Color Gamut Transform Pairs 1978 8.De La Escalera,A;Moreno,L.E;Salichs,M.A Road Traffic Sign Detection and Classification,Industrial Electronics 1997(06) 9.Hasan Fleyeh Shadow and Highlight Invariant Colour Segmentation Algorithm For Traffic Signs 2006 本文读者也读过(7条) 1.刘鑫.杨立敬.朱双东.LIU Xin.YANG Li-jing.ZHU Shuang-dong快速交通标志检测预处理方法[期刊论文]-计算机工程与应用2010,46(29) 2.徐迪红.唐炉亮.XU Dihong.TANG Luliang基于颜色和标志边缘特征的交通标志检测[期刊论文]-武汉大学学报(信息科学版)2008,33(4) 3.陈维馨道路交通标志检测技术研究[学位论文]2007 4.卢盛荣.刘礼锋.李翠华.LU Sheng-rong.LIU Li-feng.LI Cui-hua基于颜色分割和多特征融合的交通标志检测[期刊论文]-厦门大学学报(自然科学版)2011,50(4) 5.张静.何明一.戴玉超.屈晓刚.ZHANG Jing.HE Mingyi.DAI Yuchao.QU Xiaogang综合颜色和形状的圆形交通标志检测方法[期刊论文]-计算机工程与应用2011,47(2) 6.何江萍三角形交通标志的检测方法研究[学位论文]2009 7.张静.何明一.戴玉超.屈晓刚.ZHANG Jing.HE Ming-Yi.DAI Yu-Chao.QU Xiao-Gang多特征融合的圆形交通标志检测[期刊论文]-模式识别与人工智能2011,24(2) 本文链接:https://www.doczj.com/doc/7a14521049.html,/Periodical_gwgl201102066.aspx
智能交通中的车辆违章行为牌识别 化工学院白武鑫 学号:913103860319 2014年5月 一、研究背景 智能交通系统(Intelligent Transportation System,ITS)源于日本和美国 大规模道路交通运输智能化研究实验,起初这种研究主要进行道路功能和车辆智 能化的研究,但是随着研究的不断深入,系统功能扩展到道路交通运输的全过程 以及其相关服务部门,现在智能交通系统成为利用高新技术对传统的运输系统进 行改造而形成的一种信息化、智能化、社会化的新型运输系统,它涵盖了电子技 术、信息科技、模式识别、传感器技术等多门学科,是国家科研攻关的重点项目 之一。 智能交通电子警察系统的发展,不仅对整个交通运输系统,而且对人们的生 活方式和质量以及对社会的可持续发展,都将产生重要影响。随着我国人均机动 车保有量的快速递增,交通状况也日益受到人们的重视,如何有效地科学地实施 交通管理,已成为中国政府和相关部门关注的焦点。在一些大中型城市中,交通 状况的管理水平对整个城市的发展尤为重要,而对违规车辆进行管理和监控则是 其中一个极其重要的环节。传统上对交通违章车辆监控主要是通过埋在地下的感 应器或车轴传感器来实现,这些方法对路面有损坏,施工安装和维护都不方便。 随着视频技术的飞速发展和计算机运算速度的提高,基于计算机视频检测技术的 交通监控系统已成为可能。计算机视频检测与其它交通检测技术相比,主要特点 是安装调试方便,不破坏路面,设备维护简单,不影响路面交通状况。一个有效 的交通监控系统,不仅可以提高交通系统的安全性,还可以提高道路的通行能力, 同时,降低交通拥挤而造成的能源消耗和环境污染,因此建立一个高适应性、稳 定性的交通监控系统势在必行。随着现阶段智能交通的不断发展,建立这样一套 视频检测和违规识别系统无论从实用角度还是从经济角度都具有非常好的应用 前景。 如何有效地进行交通管理,越来越成为世界各国政府和有关部门所关注的焦点。针对此问题,各种智能交通管理系统相继产生或者已在研发之中,而对违章车辆进行监控则是其中一个极其重要的环节。传统上对交通违章车辆监控主要是通 过埋在地下的感应线圈来实现,这种方法对路面破坏性大,施工和安装都不方 便,并且要经常进行维修和维护。随着视频技术的飞速发展和计算机速度的成 倍提高,基于计算机视频检测技术的交通监控系统的实现己成为可能。计算机 视频检测较其它交通检测技术而。苗主要特点是安装调试方便,对路面不会产 生损坏,维护简单,不会对路面交通状况产生影响,并且可以得到很多交通信 息。 二、解决方法 由于普通的标清视频最高像素只有40万,包含的视频信息量较少,而高清
认识交通标志教案 一教学目标: 1.知识:通过活动认识各种交通标志及分类和用处 2.技能:识别交通标志并知道它的用处 3.情感:使学生受到交通安全知识的教育,增强安全意识 二教学重点:识别常见的交通标志知道它的用处 三教学重点:能识别各种交通标志,自觉遵守交通规则 四教学准备:课件,各种交通标志牌 五教学过程: 1导入: 师:同学们,在上课之前老师想给大家叫一个故事,故事的名字是《小明的“痛”》。家住南华路的小明是某学校四年级的学生,每周日小明都要去马路对面的奶奶家玩,这天小明照例高高兴兴地往奶奶家去,为了节省时间小明决定走离家比较近的一条非机动车地下通道,由于走得匆忙,并没看清树在通道口的一块标志牌,结果在行走途中被迎面而来的自行车撞倒了,由于车速过快,造成小明右脚骨折,身上多处擦伤,他将离开小伙伴们至少一个月的时间,多么惨痛的教训啊! 同学们,你认识这个标志牌吗?(指向禁止行人通行标志)听了这个故事你有什么感想呢?(学生交流)
师:是啊,为了我们的人生安全,我们必须严格遵守交通规则,而要遵守交通规则首先得认识道路上的各种交通标志,今天我们就要来学习和认识交通标志。 2新授: ①师:(出示9张交通标志图)你认识它们吗?在哪里见过它们?(可以告诉我你认识第几排第几个) 还有哪些是你不认识的吗?(学生提出疑问) ②师:让我们一起来认识这些交通标志(一一讲解) ③师:同学们,这些交通标志你都记住了吗?接下来我就要来考考大家的记忆力,我们来个“交通标志大比拼”。 在班级比赛之前将在每个小队中进行一个选拔赛,请小队长负责组织组员进行记忆大考验,可以是手举标志牌,让学生说意思,也可以说意思让同学举标牌,每队选出一个优胜者参加班级比赛,听明白了吗?开始!(小组讨论) 师:准备好了吗?要求:听清楚老师的题目,其他组员不可以提醒,每答对一题,这个小队将贴上一个“交通小卫士”,比赛正式开始!(在这一轮中,某某小队优胜) ④师:大家的记忆力真棒,这些标志真是难不倒大家。 你能发现这些标志有什么特点吗? (学生交流:形状颜色图案不同) 以小组为单位,我们来找找它们的规律,来分分类吧!(标志牌在桌上展开,相同类的并排放一起)
道路交通状态识别技术研究?技术与方法 道路交通状态识别技术研究 ■张雷元,袁建华,赵永进 公安部交通管理科学研究所,无锡 214151 摘 要:交通拥堵和突发事件已成为困扰当前城市交通的2大难题,重点讲述了如何识别交通状态,提出了1种基于模糊推理的交通拥堵等级评判算法和1种基于双变量模型的交通事件识别算 法。经过验证,这2种算法可达到较好的交通状态识别效果。 关键词:交通状态;模糊推理;交通事件;双变量模型 0 引言 随着国民经济的高速发展和城市化进程的加快,我国的机动车拥有量及道路交通流量急剧增加,日益增长的交通需求与城市道路基础设施建设之间的矛盾已成为目前城市交通的主要矛盾,由此导致交通拥挤和堵塞现象频频发生[1]。交通拥堵严重地影响了人们的日常出行活动,制约着城市经济的发展。因此,对交通事件尤其是交通拥堵的识别就显得尤其重要。交通状态识别就是根据当前的交通流特征参数作出判断,识别出拥挤事件的存在,最大限度地减少拥挤事件对正常交通的影响,保证路网的畅通[2]。 目前,国内外研究人员已对城市和高速公路交通状态进行了一些研究。在城市路网交通状态研究方面,主要从检测数据得出相关结论。例如:任江涛和张毅等人应用模式识别的理论和方法,对城市交通网络和高速公路网络中的模式进行研究,得出了交通状态可化为重复出现、数量有限且不同类型的模式的结果[3];郭伟和姚丹亚等人利用模式识别方法,提取出路口交通流运行状况的特征向量并通过路口数据相似性建立交通状况的评估模型[4]。这些研究工作都取得了不错的效果,为交通状态识别技术的研究提供了很好的参考。 本文将主要提出2种算法,一种是基于模糊推理的交通拥堵等级评判算法,该方法用于对交通拥堵等级进行评判,以量的形式说明交通拥堵的状况;另一种是基于概率统计的双变量模型法,该方法利用占有率的变化来判断是否发生交通事件,其使用简单,输入要求低,适合一般突发事件的检测。 1 交通拥堵等级评判算法 交通拥堵等级判别就是根据当前的交通流特征信息,结合交通知识将交通拥挤程度进行等级划分,以量的形式告诉人们目前的交通拥挤情况。交通拥挤程度是一个模糊的概念,形容一个交通状态是否拥挤并没有很确切的数据,因此通常采用模糊推理的方式来评判交通拥堵状态。 模糊推理法原理是根据交通流量、占有率和交通拥挤状态之间的关系组成模糊规则矩阵,然后利用交通流量、占有率的实测数据作为输入,通过一系列的 收稿日期:2008-1-21 基金项目:国家高技术研究发展计划(863计划)现代交通技术领域综合交通运输系统与安全技术专题,课题“新一代智能化交通控制系统技术”(2006AA11Z229)作者简介:张雷元(1978—),男,江西宜春,助理研究员,主要研究方向:智能交通技术。E-mail:zhangleiyuan@https://www.doczj.com/doc/7a14521049.html, 92
交通状态判别 一、案例背景介绍 随着机动车保有量的不断上升,城市的快速发展在促进经济繁荣、社会进步的同时,也不可避免的带来了交通拥堵问题。 在交通发展的过程当中,交通拥堵是诸多问题中产生频率最高、影响最大、持续时间最长的一个。交通拥堵增加了人们上下班的时间代价和精神压力,降低了城市运行效率,还给国民经济带来不可估量的经济损失。 交通拥堵的产生从表面看是由城市现有的路网资源与实际的出行需求之间的矛盾导致,而根本原因是城市路网规划不合理,与城市当前发展之间的失衡造成路网负荷增加、交通运行稳定性下降。 为了实现对交通秩序的实时监测和控制,城市道路和高速公路两侧布置了大量的交通数据检测器,每天可以产生千万级别的数据。这些交通数据体量巨大、数据结构多种多样、价值丰富却又密度低,具有大数据的典型特征。近年来,针对这些海量的交通数据如何建立有效的分析和处理流程,从中挖掘出有价值的信息,成为智能交通系统的重点研究方向。 二、多模型建模理论 多模型建模方法就是对训练数据建立多个子模型,把子模型对测试数据的分析通过某种方法结合,形成最后的分析结果。单模型结构是对非线性系统建立数学模型时的最基本方法,一般先对样本数据使用不同的理论建立一系列不同的模型,从中选择性能最优或次优的模型参与实际的应用。对于复杂的非线性系统,单模型是一种整体上的近似解。Bates和Granger于1969年首次提出将多个数学模型连接以提高模型的预测能力、提高系统鲁棒性的方法,自此以后多模型建模方法在时间序列分析、状态预测估计、化工预警控制等多个领域得到广泛的研究和应用。 在模型的训练过程中,通常需要收集较多的样本数据以保证神经网络对实际生产过程的充分反映。如果样本规模较大,神经网络的结构比较庞大、训练时间加长,实际训练中先对样本聚类分析得到规模较小的子集,理论上每个样本子集的学习速度将会加快且网络结构更加紧凑,总时间也会降低。另外,当样本数目较大时,部分数据在距离意义上相邻较近,对应的输出在距离意义上却较远,这样的样本虽然仍可以使用单个神经网络学习,但是学习之后模型的泛化能力较差。这是将学习样本空间进行分解的主要原因。
指示标志 直行向左转弯向右转弯直行和向左转弯 表示只准一切车辆直行。此标志设在直行的路口以前适当位置。表示只准一切车辆向左转 弯。此标志设在车辆必须 向左转弯的路口以前适当 位置。 表示只准一切车辆向右转 弯。此标志设在车辆必须 向右转弯的路口以前适当 位置。 表示只准一切车辆直行和 向左转弯。此标志设在车 辆必须直行和向左转弯的 路口以前适当位置。 直行和向右转弯向左和向右转弯靠右侧道路行驶靠左侧道路行驶 表示只准一切车辆直行和向右转弯。此标志设在车辆必须直行和向右转弯)的路口以前适当位置。表示只准一切车辆向左和 向右转弯。此标志设在车 辆必须向左和向右转弯的 路口以前适当位置。 表示只准一切车辆靠右侧 道路行驶。此标志设在车 辆必须靠右侧行驶的路口 以前适当位置。 表示只准一切车辆靠左 侧)道路行驶。此标志设 在车辆必须靠左侧行驶的 路口以前适当位置。 立交直行和左转弯行驶立交直行和右转弯行驶环岛行驶步行 表示车辆在立交处可以直行和按图示路线左转弯行驶。此标志设在立交左转弯出口处适当位置。表示车辆在立交处可以直 行和按图示路线右转弯行 驶。此标志设在立交右转 弯出口处适当位置。 表示只准车辆靠右环行。 此标志设在环岛面向路口 来车方向适当位置。 表示该街道只供步行。此 标志设在步行街的两端。 鸣喇叭最低限速单行路向左或向右单行路直行 表示机动车行至该标志处必须鸣喇叭。此标志设在公路的急转弯处、陡坡等视线不良路段的起点。表示机动车驶入前方道路 之最低时速限制。此标志 设在高速公路或其他道路 限速路段的起点。 表示一切车辆向左或向右 单向行驶。此标志设在单 行路的路口和入口处的适 当位置。 表示一切车辆单向行驶。 此标志设在单行路的路口 和入口处的适当位置。
Vol 20 No 2公 路 交 通 科 技2003年4月JOURNAL OF HIGHWAY AND TRANSPORTATION RESE ARCH AND DE VELOPMENT 文章编号:1002 0268(2003)02 0063 05 交通状态模式识别研究 任江涛,欧晓凌,张 毅,胡东成 (清华大学自动化系,北京 100084) 摘要:在网络层次上进行区域交通信号控制、交通分配和路径诱导是缓解交通堵塞的有效途径之一。大量的实践经验表明,无论是在城市交通网络,还是在高速公路网络中,网络的状态可分为数量有限且不同类型的模式,并且这些模式不断重复出现。而针对不同的交通网络状态模式,可以通过理论分析或仿真研究等途径,求解用于进行区域信号控制、交通分配及路径诱导的优化控制参数及控制策略。当系统识别出网络处于某种模式时,就可参照事先确定的优化参数及策略进行交通控制和诱导,以缓解交通拥塞,提高交通系统的运行效率。本文基于对交通网络状态模式识别问题及其应用的重要性的认识,应用模式识别的理论和方法,对交通网络状态模式识别问题进行了一些初步研究。 关键词:交通网络状态模式;模式识别;支持向量机 中图分类号:U491 13 文献标识码:A Pa ttern Recognition of Traffic States RE N Jiang tao,OU Xiao ling,Z HANG Yi,H U Dong chen g (Department of Automation,Tsinghua Universi ty,Beijing 100084,China) Abstract:Real time network level si gnal control,traffic assignment and route guidance is promising approaches for alleviating conges tion Based on our experience,we can know that a li mited number of network level traffic patterns are often recurrent no matter in urban traffic networks,nor in highway networks Different opti mal sets of control parameters and strateg ies for area wide signal control,traffic assi gnment and rou te guidance can be determined according to different traffic patterns using many methods,such as theory analysis and si mulation Because of the importance of pattern recogni tion of network level traffic pattern in traffic control and other applications,we do some elementary research on the topic based on the theories and methods of pattern recognition area Key words:Network level traffic pattern;Pattern recognition;S VM 0 引言 当前,智能交通系统的研究和开发越来越受到重视,特别是随着信息技术在智能交通领域的应用和发展,取得了越来越多的理论和应用成果。信息理论和技术,如人工智能、模式识别、控制理论等,正广泛地应用于智能交通系统的各个研究领域。 实时区域交通信号控制、交通分配和路径诱导是缓解交通拥塞的有效途径之一。正是信息的采集、传输、存储、分析处理及应用,实现了交通管理从简单静态管理到智能动态管理的转变,从而实现了大交通系统的动态优化运行,有效地满足了人们的交通系统发展的需求。 大量的实践经验表明,无论是在城市交通网络,还是在高速公路网络中,网络的状态可分为不同类型的模式,并且这些模式不断重复出现。而针对不同的交通网络状态模式,可以通过理论分析或仿真研究等途径,求解用于进行区域信号控制、交通分配及路径诱导的优化控制参数及控制策略。当系统识别出网络处于某种模式时,就可参照事先确定的优化参数及策略进行交通控制和诱导,以缓解交通拥塞,提高交通系统的运行效率。当前,对交通网络状态模式的研究,正获得越来越多的重视。 为了有效地实现基于网络状态模式的区域交通信号控制,文献[1]提出了基于人工神经网络的交通网络状态模式聚类方法。在此研究中,一个拥有6个
道路交通标志的安装与识别 摘要:经济的快速发展,给道路交通带来了巨大的压力。为缓解交通拥挤,减少交通事故,构建智能交通系统,我们工作人员加强了对于道路交通标志的安装与识别的能力。文章对新时期道路交通标志标志的识别系统以及一些交通标志安装技术进行了简单的介绍,仅供参考。 关键词:道路交通;识别;标志;智能;方法 引言: 在我国的智能交通系统技技术与国外发达国家相比还存在一定差距。本文结合笔者自身工作经验,从智能交通系统的重要子系统—道路交通标志识别系统出发,介绍了道路交通标志的基本知识,分析了道路交通标志的安装技技术与识别原理,阐述了道路交通标志识别的方法。 一、道路交通标志识别系统 在智能交通系统的研究中,以道路交通标志的检测与识别为代表的智能交通计量是一项重要内容。道路交通标志识别(Traffic signs Recognition,简称TSR )已经成为智能交通系统相关技术研究的热点问题。 道路交通标志识别系统的工作流程如下:对识别系统覆盖下的机动车辆按照摄像机,准确及时的摄取周围环境状况,并将拍摄的照片传送到道路交通标志识别系统,经过系统的图像处理环节,对车辆拍摄的照片进行解析和处理,进行道路交通标志的识别,并输出识别结果给现场的车辆驾驶员,起到提示作用,以缓解交通压力、增强道路交通安全。 二、道路交通标志简介 智能交通系统集检测、通讯、控制、计量、计算机信息等技术于一体,是一个综合性应用系统。如上文所述,利用计算机控制的视觉系统信息采集是智能交通系统发挥作用的重要环节,道路交通标志作为提示、告警标志,本身包含了重要的交通信息。因此,熟悉和了解基本的道路交通安全标志,是进行道路交通标志识别的基础。 道路交通标志对大部分人并不陌生,它是与日常生活息息相关的一种起到指示、提示和警示作用的标志。路标的设置不仅要考虑人眼的对比度和识别程度,还要考虑使用特定颜色来表 达抽象概念。考虑到图形符号在辨认速度和距离上优于文字信息,道路交通标志集合了各类图形、符号、颜色与少量文本,分别用来表达特定的环境条件,以提醒驾驶员和行人根据路况作出判断。另外,人眼的辨识力受到交通标志的尺寸、间隔、观察距离影响,因
基于京津塘高速数据的K-mean交通状态判 别方法的研究
摘要:近年来,随着道路网络的逐步成熟和道路交通需求量的进一步增加,与交通事件无关的常发性交通拥挤越来越严重。交通高峰期的持续时间不断延长,高峰期出现交通拥挤的路段不断增加,严重影响了道路交通的安全性和运行效率,因此,常发性交通拥挤也逐渐成为交通监控的重要内容之一。以发现道路上的突发交通事件为目的AID方法研究,已经扩展成为对道路上所有交通拥挤状态自动判别方法的研究。并且,交通状态判别有重要的意义所在,它可以对交通管理者实时了解路网交通状态变化的信息,及时采取对策,疏导交通、减少拥挤,提高交通安全保障,使有限的路网时空资源发挥最大的效率而提供帮助。 京津塘高速是连接北京和天津的主要道路交通干道,承担了两个城市间的大部分道路交通运输,它的交通状态在相当程度上反应了两城市之间交通状态与出行质量。 本文以京津塘高速某段下行行车道线圈传感器数据为基础,研究了基于 K-mean的交通状态判别方法研究交通状态预测方法,主要的研究工作如下:文章首先对京津塘高速公路2009年4月的下行行车道交通数据用excel进行了处理,并应用K-mean分析方法对此交通流基础特征数据进行分析,最后用matlab编程实现,得到用于交通状态判断的参照标准,并画出关于车流量,车流密度和平均速度的数据图,以及它们三者之间的三维关系图。 关键词:道路交通状态;自动判别;智能交通系统 一、引言
如何应对城市现代化带来的交通问题,是城市交通管理者面对的需要解决的十分迫切的问题。国内外实践经验证明,单纯依靠修建道路基础设施是不能很好的解决城市交通问题,现代化的交通管理起着非常重要的作用。发达国家交通经验实践表明,采用智能交通系统(ITS)是解决交通拥堵、减少交通事故、防止交通污染、提高交通管理水平的最有效的方法和手段。 交通状态分析和判别能够从全局角度实时地反应路网的服务水平,是交通控制系统与交通流诱导系统协同的重要依据。首先,由于它反映了交通流客观运行状态可以向交通管理者提供准确地交通运行状况信息,并可以作为交通控制系统的输人参数优化区域路网;其次,由于交通状态能够反映出行者的心理,在确定诱导策略及发布交通信息时,科学地进行交通状态分析可以更好的被出行者所接受。交通状态的判别可以对道路基础信息采集系统采集到的各类交通数据进行分析,根据他们的变化趋势得出目前交通系统的运行状况。通常来说,一个交通状态判别系统包括数据获取、数据准备、数据规约、数据转换、数据比较、实时状态判断等过程。在这个过程中,系统将采集到的基础数据经过一定处理后与一个既定的交通状态判断标准进行比较,从而判别出目前交通系统处于何种状态。得到以密度为主要参数的判别结果后将其提供给交通系统的管理者和决策者,他们针对不同的情况做出相应的交通控制、管理和诱导措施。 二、背景 近年来,随着道路网络的逐步成熟和道路交通需求量的进一步增加,与交通事件无关的常发性交通拥挤越来越严重。交通高峰期的持续时间不断延长,高峰期出现交通拥挤的路段不断增加,严重影响了道路交通的安全性和运行效率,因此,常发性交通拥挤也逐渐成为交通监控的重要内容之一。以发现道路上的突发交通事件为目的AID方法研究,已经扩展成为对道路上所有交通拥挤状态自动判别方法的研究。进行交通状态判别,其意义在于对交通管理者实时了解路网交通状态变化的信息,及时采取对策,疏导交通、减少拥挤,提高交通安全保障,使有限的路网时空资源发挥最大的效率而提供帮助。 国外最早开发并投入使用的道路交通状态判别算法是以判别突发交通事件
成都机动车尾号限行的影响分析 摘要 随着国民经济的高速发展和城市化进程的加快,我国机动车保有量及道路交通流量急剧增加,日益增长的交通需求与城市道路基础建设之间的矛盾已成为目前城市交通的主要矛盾,交通拥堵已经成为中国各大城市首要求解的顽疾。 继北京、广州等特大城市之后,西部省会城市成都于今年4月26日开始实施车牌号码尾号限行。为保障成都二环路改造工程的顺利施工,成都二环路全线及7条城区放射性主干道,对本地及外地社会车辆实施工作日分时段按车牌尾号进行限行,以缓解交通拥堵。 本篇论文通过研究道路交通拥挤的状况,来反映交通环境。即针对道路拥挤的问题进行数学建模分析,讨论“尾号限行”是否对交通状况起到积极的影响。 道路拥堵状况评价的指标有多种,为保证评价尽可能的客观、全面和科学,我们分析采用路段平均行程速度、单位里程平均延误和路段饱和度三个评价指标来综合放映道路拥堵情况。选取的片区为成都市塔子公园片区,包括蜀都大道东段和二环路东四段这两条限行道路,由于数据的不完整性以及对应事件的不确定性,如:交通指示灯作用,驾驶车辆的速度不均等情况所造成的数据和对应结果的不完全对应,综合考虑我们采取模糊数学模型来对问题一进行分析和求解,列出非常顺畅、顺畅、缓慢、拥堵和严重拥 r x,通过已确定的模糊评价矩阵R 堵五个评判标准来综合评价。确定出其隶属度函数() 得出拥挤度系数B,最终得出其实施后的各项指标。 对于问题二,要综合考虑整体城市的交通网络情况,此时的交通状态是一种不断变化的动态过程,具有很强的随机性和偶然性。而交通拥堵的潜伏、发展和产生与具有连贯性和相关性的特点,交通阻塞的发生与它的过去和现状紧密相关,因此,有可能通过对交通状态的现状和历史进行综合分析。据此,我们采取贝叶斯网络来建立数学模型,贝叶斯网络是一种对概率关系的有向图解描述,可以从不完全、不确定或不精确的知识或信息中做出推理。我们确定变量集元素有车流量、占有率、车流速度、车流密度等四个,由于数据的限制我们的变量域将设置为一百天,从而得出贝叶斯网络结构。 对于问题三,问题提出了道路负载能力分析,由有关的技术资料可知,通行能力反映了道路所能承受的交通负荷能力。通行能力是指在一定的道路、交通、控制和环境条件下,对应于一定的行驶质量即服务水平,在某一道路断面上单位时间所能通过的最大车辆数。道路通行能力受到道路、交通等多种条件影响,而交通系统中驾驶员的驾驶行为以及整个交通流又都具有显著的随机特征。所以本文通过建立仿真数学模型,构造出基本路段的道路、交通特性等因素,模拟其中车流的运行状态及其随时空变化的过程。通过对仿真运行过程的观察、仿真结果的统计以及与采集的有关数据的对比分析,研究基本路段的通行能力。 关键字:交通拥堵尾号限行模糊模型评价贝叶斯网络预测仿真模型
常见交通标志、标线和交警手势辨识教学教案
附: 交通标志:指示标志(蓝色)、指路标志(蓝、绿色)、 警告标志(黄色)、禁令标志(红色)、 旅游标志(褐色)、辅助标志(黑白色)道路施工安全标志。 (1)蓝色:指示标志,指示方向、路线。 直行 向左转弯 向右转弯 直行和向左转弯 表示只准一切车辆直行。此标志设在直行的路口以前适当位置。 表示只准一切车辆向左转弯。此标志设在车辆必须向左转弯的路口以前 适当位置。 表示只准一切车辆向右转弯。此标志设在车辆必须向右转弯的路口以前适当位置。 表示只准一切车辆直行和向左转弯。此标志设在车辆必须直行和向左转弯的路口以前适当位置。 直行和向右转弯 向左和向右转弯 靠右侧道路行驶 靠左侧道路行驶 表示只准一切车辆直行和向右转弯。此标志设在车辆必须直行和向右转弯)的路口以前适当位置。 表示只准一切车辆向左和向右转弯。此标志设在车辆必须向左和向右转弯的路口以前适当位置。 表示只准一切车辆靠右侧道路行驶。此标志设在车辆必须靠右侧行驶的路口以前适当 位置。 表示只准一切车辆靠左侧)道路行驶。此标志设在车辆必须靠左侧行驶的路口以前适当位置。 立交直行和左转弯行驶 立交直行和右转弯行驶 环岛行驶 步行 表示车辆在立交处可以直行和按图示路线左转弯行驶。此标志设在立交左转弯出口处适当位置。 表示车辆在立交处可以直行和按图示路线右转弯行驶。此标志设在立交右转弯出口处适当位置。 表示只准车辆靠右环行。此标志设在环岛面向路口来车方向适当位置。 表示该街道只供步行。此标志设在步行街的两端。
鸣喇叭 最低限速 单行路向左或向右 单行路 直行 表示机动车行至该标志处必须鸣喇叭。此标志设在公路的急转弯处、陡坡等视线不良路段的起点。 表示机动车驶入前方道路之最低时速限制。此标志设在高速公路或其他道路限速路段的起点。 表示一切车辆向左或向右单向行驶。此标志设在单行路的路口和入口处的适当位置。 表示一切车辆单向行驶。此标志设在单行路的路口和入口处的适当位置。 干路先行 会车先行 人行横道 右转车道 表示干路先行,此标志设在车道以前适当位置。 表示会车先行,此标志设在车道以前适当位置。 表示该处为专供行人横穿马路的通道。此标志设在人行横道的两侧。 表示车道的行驶方向。此标志设在导向车道以前 适当位置。 直行车道 直行和有转合用车道 分向行驶车道 公交线路专用车道 表示车道的行驶方向。此标志设在导向车道以前适当位置。 表示车道的行驶方向。此标志设在导向车道以前适当位置。 表示车道的行驶方向。此标志设在导向车道以前适当位置。 表示该车道专供本线路行驶的公交车辆行驶。此标志设在进入该车道的 起点及各交叉口入口处以前适当位置。 机动车行驶 机动车车道 非机动车行驶 非机动车车道 表示车道机动车行驶。此标志设在道路或车道的起点及交叉路口入口处前适当位置。 表示该车道只供机动车行驶。设在该车道的起点及交叉路口和入口前适当位置。在标志无法正对车道时,可以不标注箭头。 表示非机动车行驶。此标志设在道路或车道的起点及交叉路口入口处前适当位置。 表示该车道只供非机动车行驶。设在该车道的起点及交叉路口和入口前适当位置。在标志无法正对车道时,可以不标注箭头。
交通指路标志 四车道及以上公路交叉路口预告四车道及以上公路交叉路口预告大交通量的四车道以上公路交叉路口 预告 大交通量的四车道以上公路交叉路口 预告 用以预告前方交叉路口形式、交叉公路的编号或交叉道路的名称、通往方向信息、地理方向信息以及距前方交叉路口 的距离。设在交叉路口告知标志前150 m--500 m处。用以预告前方交叉路口形式、交叉公路的编 号或交叉道路的名称、通往方向信息、地理 方向信息以及距前方交叉路口的距离。设在 交叉路口告知标志前150 m--500 m处。 用以预告前方交叉路口形式、交叉公 路的编号或交叉道路的名称、通往方 向信息、地理方向信息以及距前方交 叉路口的距离。设在交叉路口告知标 志前150 m--500 m处。 用以预告前方交叉路口形式、交叉公 路的编号或交叉道路的名称、通往方 向信息、地理方向信息以及距前方交 叉路口的距离。设在交叉路口告知标 志前150 m--500 m处。 箭头杆上标识公路编号、道路名称的公箭头杆上标识公路编号、道路名称的公路交预告前方交叉公路编号的预告标志例预告前方交叉公路编号的预告标志例
路交叉路口预告叉路口预告 用以预告前方交叉路口形式、交叉公路的编号或交叉道路的名称、通往方向信息、地理方向信息以及距前方交叉路口 的距离。设在交叉路口告知标志前150 m--500 m处。用以预告前方交叉路口形式、交叉公路的编 号或交叉道路的名称、通往方向信息、地理 方向信息以及距前方交叉路口的距离。设在 交叉路口告知标志前150 m--500 m处。 双车道公路可采用单柱标志预告前方 交叉公路编号信息。 双车道公路可采用单柱标志预告前方 交叉公路编号信息。 十字交叉路口十字交叉路口十字交叉路口十字交叉路口 用以告知前方交叉路口形式、交叉公路的编号或交叉道路的名称、通往方向信息、地理方向信息。设在距交叉路口前30 m-- 80 m处。用以告知前方交叉路口形式、交叉公路的编 号或交叉道路的名称、通往方向信息、地理 方向信息。设在距交叉路口前30 m-- 80 m 处。 用以告知前方交叉路口形式、交叉公 路的编号或交叉道路的名称、通往方 向信息、地理方向信息。设在距交叉 路口前30 m-- 80 m处。 用以告知前方交叉路口形式、交叉公 路的编号或交叉道路的名称、通往方 向信息、地理方向信息。设在距交叉 路口前30 m-- 80 m处。 丁字交叉路口丁字交叉路口丁字交叉路口丁字交叉路口