
发那科机器人零点标定说明
在发那科工业机器人得到充分和正确标定零点时,它的使用效果才会最好。因为只有这样,机器人才能达到它最高的点精度和轨迹精度,完全能够以编程设定的动作运动,所以这篇文章介绍一下发那科工业机器人如何进行零点标定。
如果因电池长时间电量低出现的零位丢失,更换电池后首先需要做以下步骤↓
一、按下示教器中的MENU键,选择下一页,然后选择系统,发现没有零点标定的选项,这时其他的一切无从谈起,我们必须把这个选项调出来。
于是我们进入系统下面的变量。
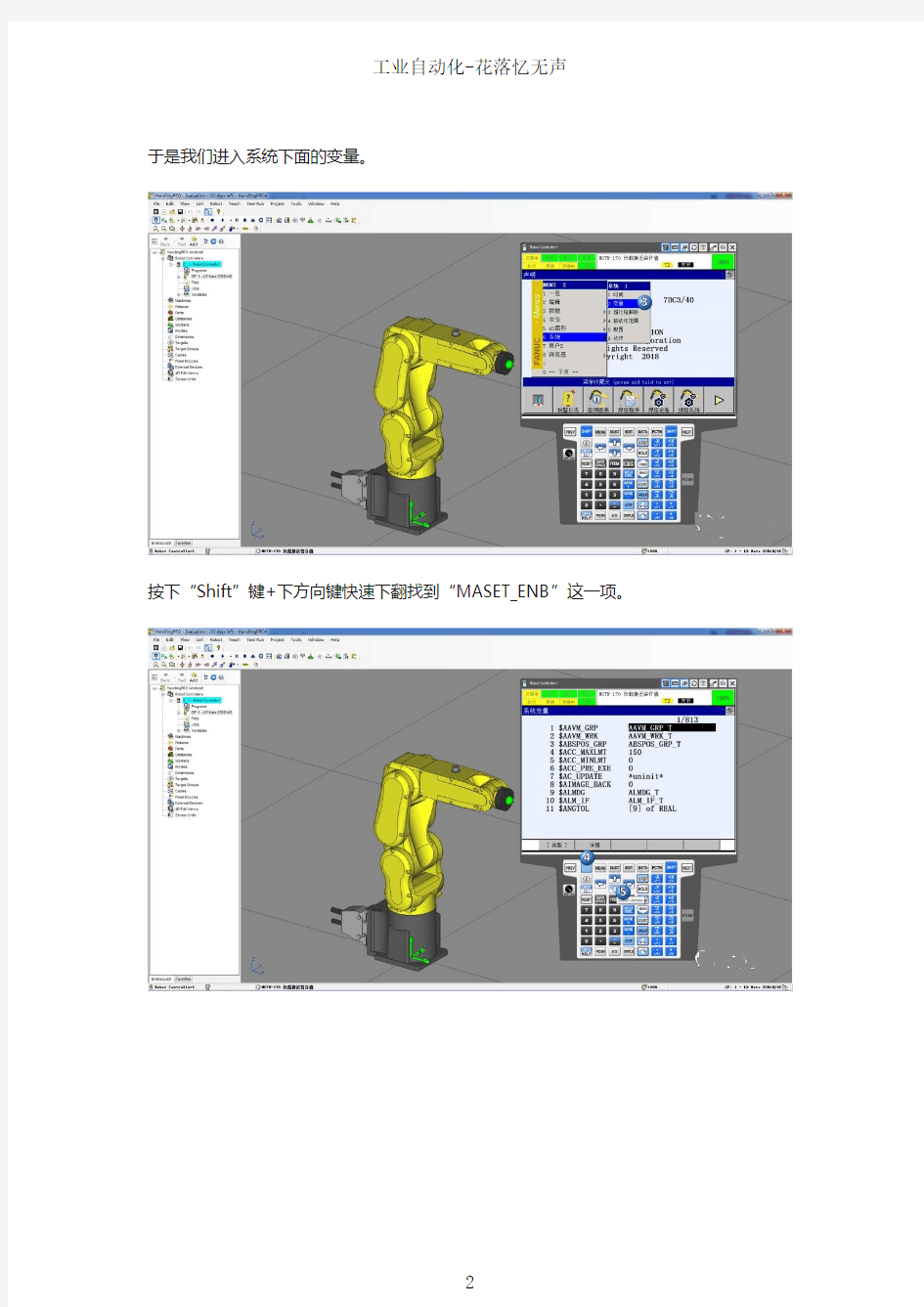
按下“Shift”键+下方向键快速下翻找到“MASET_ENB”这一项。
FlexPendant 的操作方式 1、操作 FlexPendant 时,通常左手持设备,右手在触摸屏上操作。具体手持方法如图12所示 图12 2、手持操作器主要部件如图13所示 图 13 3、控制柜上的主要按钮和端口如图14所示 图 14 4、控制柜上钥匙开关的位置于意义如图15所示 图15 注:手动全速模式不建议使用 校准机器人零点位置的具体方法 注:需要点击操作的地方都做了浅红色标记 第一步: 选择手动操纵(参看图1,首先把钥匙开关打到手动位置) 方法: 1> 点击 ABB 2> 点击手动操纵
图 1第二步:选择动作模式(参看图2 和图3) 方法: 1> 点击动作模式 2> 点击轴1 - 3 或者轴4 - 6 3> 点击确定 第三步:选择工具坐标(参看图2 和图4) 方法: 1> 点击工具坐标 2> 点击 tGripper 3> 点击确定 图2图3第四步:选择移动速度(参看图2 和图5) 方法: 1> 点击增量 2> 点击中或者小 3> 点击确定 图 4 图 5 第五步:手动移动机器人各轴到机械零点位置(参看图2) 方法: 此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系
注意: 如果先前选择轴1 - 3 则 1> 操纵杆上下移动为2轴动作 2> 操纵杆左右移动为1轴动作 3> 操纵杆顺/逆时针旋转为3轴动作 如果先前选择轴4 - 6 则 1> 操纵杆上下移动为5轴动作 2> 操纵杆左右移动为4轴动作 3> 操纵杆顺/逆时针旋转为6轴动作 1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色胶皮里面) 2> 右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各自机械绝对零点 图 6 A(六轴机器人) 图 6B(四轴机器人) 移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。 机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。 第六步:更新转数计数器(参看图1,此时可以示教器使能开关) 方法: 1> 点击 ABB 2> 点击校准 3> 点击 ROB_1 (参看图7)
机器人零点标定方法 设备维修技术档案系列资料一.哪些情况需要标定零点: 零点是机器人坐标系的基准,没有零点,机器人就没有办法判断自身的位置。 机器人在如下情况下要重新标定零点: 1.进行更换电机、机械系统零部件之后。 2.超越机械极限位置,如机器人塌架。 3.与工件或环境发生碰撞。 4.没在控制器控制下,手动移动机器人关节。 5.整个硬盘系统重新安装。 6.其它可能造成零点丢失的情况。 二.零点标定: 按下面方法可以标定零点: *千分表:手工检测,输入数据的方法。 *EMT:电子仪表自动标定记录的方法。 我们这里只介绍EMT方法。 1.机器人切换到手动方式T1。 2.用左上角第一个软键切换工作方式到出现“+/-”号加手形图标为止。 3.左手扣住左侧底面使能杆,屏幕右侧将出现纵列布置的A1-A6图标。 4.按右侧对应轴的“+”或“-”软键,移动要标定的轴到零点前预停位置,使得机械臂关节两侧刻槽对准。 5.把EMT安装到对应轴指定的仪表零点触头安装底座位置。6.EMT电缆插头连接到机器人X32插口。 7.此时,如预停位置正确,则EMT右侧两个灯同时点亮。不亮时,可以用手动操作重新微调位置。 8.按软键SETUP(设定)。 9.在下级菜单中选择MASTER(管理,这里指标定零点)。10.在下级菜单中选择EMT,回车。屏幕显示出准备标定的机器人轴号:
如:Robot axis 1 Robot axis 2 Robot axis 3 Robot axis 4 Robot axis 5 Robot axis 6 11.按软键MASTER,显示信息“Start key required(需要按启动键)”。 12.扣住使能杆,按软键Program start forwards(程序正向启动,即左侧硬键盘的“+”号外套顺时针箭头)。对应轴在程序控制下移动。当EMT检测到参考点(参考刻槽),移动停止,零点位置被记录到计算机,对应轴标定显示被清除。 ***注意: 1)标定一定要从低轴号开始,否则系统将报警。 2)A1、A6轴关节的一侧刻度槽改成螺钉或突起标记,和其它轴不同,要注意。 三.反标定: 一个不可靠的零点也可以删除。步骤是: 1.按软键SETUP(设定)。 2.在下级菜单中选择MASTER(管理,这里指零点标定)。3.在下级菜单中选择EMT,回车。屏幕显示出准备删除零点的机器人轴号: 如:Robot axis 1 Robot axis 2 Robot axis 3 Robot axis 4 Robot axis 5 Robot axis 6 4.按软键UNMASTER,对应轴的零点被删除。该轴可以重新标定零点。 生产部设备工装科陈刚 2003/8/21 修改:2005/7/24
3 按下F2[RELEASE(释放)]以释放超行程轴。 4 按住shift键,按下警告清除按钮。 5按住shift键,按下微动键把工具沿超行程轴线微动到可移动的有效范围内。 从损坏的腕部警告复原(SERVO-006) 步骤: 1 按住SHIFT键,然后按下RESET键。 2 按住SHIFT键的同时,按下正确的微动键以把机器人移到其能被维修的位置。 从一个脉冲不匹配警告,BZAL警告,RCAL警告复原(SRVO-038,062,063) 步骤:1 按下MENUS键,显示界面菜单。 2 按下“0--NEXT---”,然后在下个页面选择“6 SYSTEM”。按下F1“[TYPE(类型)]”, 然后选择“Variables”。显示系统变量界面。 3 把系统变量$MCR.$SPC_RESET设为TRUE。(这个系统变量很快会被自动设回 FALSE)。 4 按下RESET键以释放警告。 提示:即使检测到一个脉冲计数不匹配警告,该控制数据可能会被纠正。如果该控制数据被纠正,控制不需要被执行。只要把$DMR_GRP.$MASTER_DONE设为真,然后在 位置界面上选择6 MASTER/CAL。 从其他警告复原 步骤:1 清除该警告的引发源。例如,纠正程序。 2 按下RESET键来重置该警告。然后,教导盒界面上的警告信息消失。ALARM LED (发光二极管)灯灭。 C.2 警告代码 SRVO 错误代码(ID=11) SRVO-001SERVO Operator panel E--stop 可能原因:操作面板上的紧急停止按钮被按下。 解决方法:顺时针拧动紧急停止按钮以松开此按钮,并按下RESET(重启)。SRVO-002 SERVO Teach pendant E--stop 可能原因:教导盒上的紧急停止按钮被按下。 c-671
校准机器人零点位置的具体方法 注:需要点击操作的地方都做了浅红色标记 第一步: 选择手动操纵(参看图1,首先把钥匙开关打到手动位置)方法: 1> 点击ABB 2> 点击手动操纵 图 1 第二步: 选择动作模式(参看图2 和图3) 方法: 1> 点击动作模式 2> 点击轴1 -3 或者轴4 -6 3> 点击确定 第三步: 选择工具坐标(参看图2 和图4) 方法: 1> 点击工具坐标 2> 点击tGripper
图 2 图 3 第四步: 选择移动速度(参看图2 和图5) 方法: 1> 点击增量 2> 点击中或者小
图 4 图 5 第五步: 手动移动机器人各轴到机械零点位置(参看图2) 方法: 此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系注意: 如果先前选择轴1 -3 则
1> 操纵杆上下移动为2轴动作 2> 操纵杆左右移动为1轴动作 3> 操纵杆顺/逆时针旋转为3轴动作 如果先前选择轴4 -6 则 1> 操纵杆上下移动为5轴动作 2> 操纵杆左右移动为4轴动作 3> 操纵杆顺/逆时针旋转为6轴动作 1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色 胶皮里面) 2> 右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各 自机械绝对零点
图 6
移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。 机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。 第六步: 更新转数计数器(参看图1,此时可以示教器使能开关) 方法: 1> 点击ABB 2> 点击校准 3> 点击ROB_1 (参看图7) 图7 4> 点击转数计数器(参看图8) 5> 点击更新转数计数器…(会弹出一个警告界面) 6> 点击是
发那科机器人SERVO-062故障维修 FANUCF-200iB七轴点焊机器人在对控制器断电检修后,控制器通电运行时,发那科机器人发出伺服故障报警,报警故障代码为SERVO-062。对此故障代码进行复位操作:按MENUS→SYSTEM→F1,[TYPE]→找master/cal→F3,RES_PCA→F4,YES后,机器人仍然发出伺服故障。 根据发那科机器人维修SERVO-062的含义解释为SERVO BZAL,导致发那科机器人维修此故障的原因为脉冲编码器的绝对位置后备用电池尚未连接或者电池耗尽,机器人内的电池电缆断线所导致的。 详细介绍发那科机器人维修检测此次故障维修检测步骤: ①检查发那科机器人编码器上数据存储的电池是否有电或者已经损坏。编码器脉冲数据存储为4节普通1.5V的1号干电池,测量每节电池电压均小于1.4v,电压明显偏低,更换新的电池,再次对机器人维修故障进行复位,仍然发出servo-062故障。 ②检查控制器内伺服放大器控制板坏。测量伺服放大器LED“D7”上方的2个DC线路电压检测螺丝,如果DC链路电压>50V,可判断伺服放大器控制板异常。实际检测发现DC线路电压<50v,所以初步判断伺服放大器控制板处于正常状态。观察伺服放大器控制板上p5v、p3.3v、svemg、open的LED颜色,确认电源电压输出正常,没有外部紧急停止信号输入,与机器人主板通信也正常,排除伺服放大器控制板损坏故障原因。 ③检查是否因为线路损坏原因导致的。对机器人控制器与机器人本体的外部连线电缆RM1、RP1进行检查,RM1为机器人伺服电机电源、抱闸控制线,RP1为机器人伺服电机编码器信号以及控制电源、末端执行器、编码器上数据存储的电池等线路。拔掉插头RP1,测量端子5、6、18控制电源电压+5V、+24V均正常。再检查编码器上数据存储的电池线路,而机器人每个轴的伺服电机脉冲编码器控制端由1~10个端子组成,端子8、9、10为+5V电源,4、7为数据保持电池电源,5、6为反馈信号,3为接地,1、2空。先拔掉M1电机的脉冲控制插头M1P,测量端子4、7电压为0,同样的方法检查M2~M7电机全部为0,由此可以判断发那科机器人维修故障原因是因为编码器上数据存储的电池线路损坏。经查,发现正负电源双绞线的一端插头长期埋在积水中,线路已腐蚀严重。 更换新的线路后复位,对发那科机器人进行全轴零点复归“ZEROPOSTTTIONMASTER”,导入备份程序后恢复正常工作,故障解除。
EPSON机械手脉冲零点校正 一、工具: 钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。 二、应用场合: 1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用, 需要重新校准机械手的位置(重新校准机械手脉冲零位)。 2.更换马达等其他问题。 三、机械手脉冲零点位置校正: 具体调节步骤如下: 1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示: .点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释 放机械手4个伺服马达刹车;具体如图: 2.点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释 放机械手4个伺服马达刹车;具体如图:
— 3.手动将机械手调整到脉冲零点位置;如下图所示: +Z方向 +X方向 +Y方向 具体细节: 1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示: 2)同理,手动移动丝杆使3、4轴如图所示:( U轴0位,丝杆端面对应外套上的指针;丝
—杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。) 3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手 伺服马达刹车;接着点击“motor off”按钮,即关闭机械手;具体如图: 4. 保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在 软件中打开命令窗口(ctrl+M)中输入: Encreset 1 按回车 Encreset 2按回车 Encreset 3按回车 Encreset 3,4按回车 如图: 5. 保持机械手目前手动零点位置不动,重启控制器,具体操作如图:
SRVO — 062 一, 消SRVO — 062报警(此时机器人完全不可以动)1)进入Master/Cal 界面; 步骤:MENU — 0 next — System — Type — Master/Cal,若无Master/Cal项, 则:MENU — 0 next — System — Type — Variables — 将$MASTER_ENB 改为1后在 MENU — 0 next — System — Type中会出现Master/Cal 项。 2)在Master/Cal 界面内按F3 RES_PCA 后,按YES 消除脉冲编码器报警; 3)关机。 二, 消SRVO — 075报警 1)开机(出现SRVO — 075报警),此时机器人关节可动; 2)使用TP点动机器人报警轴20度左右; 3)按REST ,消除SRVO — 075报警 三, 零点复位(Mastering) (一),Quick Mastering z Setting mastering data 在机器人正常使用时
1)进入Master/Cal界面 2)将机器人调整到Master Ref位置 3)选5 Set Quick Master Ref,按YES确定 z Quick Mastering 当机器人意外由于电气或软件故障而丢失零点后 1)进入Master/Cal界面 2)示教机器人到Master Ref位置 3)选3 Quick Mastering,按YES确定 4)选6 CALIBRATE,按YES确定 5)按F5,[ DONE ]。 注:在“Setting mastering data”和“Quick Mastering”两个过程之间不能有其他Mastering动作进行,否则其Mastering数据将会失效。 (二),SINGLE AXIS MASTER 1,进入Master/Cal 界面; 2,选择3 SINGLE AXIS MASTER,回车,进入SINGLE AXIS MASTER界面。 3,将报警轴(即需要Mastering的轴)的【SEL】项改为1; 4,示教机器人的报警轴到0度; 5,在报警轴的MSTR POS项输入轴的数据(一般是0); 6,按 F5 EXEC 则相应的【SEL】项由1 变成0 ,【ST】项由 0 变成2;
爱普生机器人原点校准 方法 Coca-cola standardization office【ZZ5AB-ZZSYT-ZZ2C-ZZ682T-ZZT18】
E P S O N机械手脉冲零点校正 一、工具: 钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。 二、应用场合: 1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。 2.更换马达等其他问题。 三、机械手脉冲零点位置校正: 具体调节步骤如下: 1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示: .点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图: 2.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图: 3.手动将机械手调整到脉冲零点位置;如下图所示:
+Z方向 +X方向 +Y方向 具体细节: 1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示: 2)同理,手动移动丝杆使3、4轴如图所示:(U轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。) 3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motoroff”按钮,即关闭机械手;具体如图: 4.保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入: Encreset1按回车 Encreset2按回车
常用故障代码和故障排除方法 伺服 - 001操作面板紧急停止 SRVO- 001 Operator panel E-stop [现象]按下了操作箱/操作面板的紧急停止按扭。 SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。(注释) [对策1]解除操作箱/操作面板的紧急停止按扭。 [对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。 [对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。逐一更换开关单元或操作面板。 [对策4]更换配电盘。 [对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。 在采取对策6之前,完成控制单元的所有程序和设定内容的备份。 [对策6]更换配电盘。 (注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。(参阅示教操作盘的报警历史画面) 伺服-001操作面板紧急停止 伺服-004栅栏打开 サーボ-007外部紧急停止 伺服-204外部(SVEMG异常)紧急停止 伺服-213保险丝熔断(面板PCB) 伺服-280SVOFF输入 伺服 - 002示教操作盘紧急停止 SRVO- 002 Teach pendant E-stop [现象]按下了示教操作盘的紧急停止按扭。 [对策1]解除示教操作盘的紧急停止按扭。 [对策2]更换示教操作盘。 伺服 - 003紧急时自动停机开关 SRVO- 003 Deadman switch released [现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。 [对策1]按下紧急时自动停机开关并使机器人操作。 [对策2]更换示教操作盘。 伺服 - 021SRDY断开(组:i轴:j) SRVO- 021 SRDY off (Group:i Axis:j) [现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。(所谓HRDY,就是主机相对于伺服发出接通还是断开伺服放大器的电磁接触器的信号。SRDY是伺服相对于主机发出伺服放大器是否已经停止的信号。
常用故障代码和故障排除方法 伺服 - 001操作面板紧急停止 SRVO- 001 Operator panel E-stop [现象]按下了操作箱/操作面板的紧急停止按扭。 SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。(注释) [对策1]解除操作箱/操作面板的紧急停止按扭。 [对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。 [对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。逐一更换开关单元或操作面板。 [对策4]更换配电盘。 [对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。 在采取对策6之前,完成控制单元的所有程序和设定内容的备份。 [对策6]更换配电盘。 (注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。(参阅示教操作盘的报警历史画面) 伺服-001操作面板紧急停止 伺服-004栅栏打开 サーボ-007外部紧急停止 伺服-204外部(SVEMG异常)紧急停止 伺服-213保险丝熔断(面板PCB) 伺服-280SVOFF输入 伺服 - 002示教操作盘紧急停止 SRVO- 002 Teach pendant E-stop [现象]按下了示教操作盘的紧急停止按扭。 [对策1]解除示教操作盘的紧急停止按扭。 [对策2]更换示教操作盘。 伺服 - 003紧急时自动停机开关 SRVO- 003 Deadman switch released [现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。 [对策1]按下紧急时自动停机开关并使机器人操作。 [对策2]更换示教操作盘。 伺服 - 021SRDY断开(组:i轴:j) SRVO- 021 SRDY off (Group:i Axis:j) [现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。(所谓HRDY,就是主机相对于伺服发出接通还是断开伺服放大器的电磁接触器的信号。SRDY是伺服相对于主机发出伺服放大器是否已经停止的信号。
C.警告代码 手册的这部分描述了警告代码,警告强度,可能的引起原因和措施。 j 附录目录 C.1 警告代码表的具体描述 C.2 警告代码 C.1 警告代码表的具体描述 其中:Alarm code表示警告代码;Message表示信息;Alarm severity 表示警告强度。 警告 在程序被校正或返回执行或当从外围单元输入一个紧急制动信号或是其他警告信号时失败则会引发警告。警告是用来提示操作员发生故障,使其为安全起见能中断处理。 提示:如果出现的警告编号不在这里给出代码内,请和FANUC机器人专家联系。 警告代码显示或指示 当引发了一个警告,在教导盒上的警告LED发光二极管会亮起,首先会在出现警告信息,然后会出现界面命令行。操作员可以通过查看LED和信息得知引发了哪个警告。 图C-1 警告显示
警告强度 如何操作程序或机器人直到程序或机器人停止取决于引发警告的原因的严重性。这个“严重性”被成为强度。警告强度级别如下所示: 表C-1 警告强度 活动警告界面只显示活动的警告。一旦该警告被警告清除信号输入清除,活动警告界面显示:“没有活动的警告”。 在上一条警告清除信号输入后,界面显示警告输出。当在警告历史纪录界面按下删除键(+shift),相应的警告会从活动警告界面里清除。 该界面显示警告的严重等级为PAUSE或更高。不会显示W ARN警告,NONE警告或重置。如果系统变量诸如$ER_NOHIS设置正确的话,一些PAUSE警告或是更严重的警告也可能不会被显示。 如果检测到了多个警告,该界面按检测到的顺序反向显示。
最大可以显示100行。 如果警告有错误发生代码,该代码会在警告显示行下显示出来。 图C-2显示活动警告界面和警告历史记录界面的操作流程。 其中:MENU key pressed, then 4ALARM selected表示:按下MENU(菜单)键,然后选择 4ALARM;Alarm key pressed表示:按下警告键;Automatically displayed when an alarm is output表示:当警告被输出会自动被显示;Active alarm screen displayed表示:显示活动警告界面;Alarm history screen displayed表示:显示警告历史记录界面。 自动警告显示函数 当检测到一个会导致系统停止(PAUSE或更严重的警告)的警告,自动警告界面显示函数会自动显示警告界面。这个函数可以使得操作员不用手动显示警告界面,也可以使得导致系统故障的原因被快速发现。 提示:显示要求被满足,即使在开始时检测到一个警告也会自动显示警告界面。自动警告显示被执行,不考虑启动的模式。 提示:当连接了CRT,检测到了一个警告,警告界面会在教导盒和CRT上同时出现。 自动警告界面显示所需条件如下所述: F 当自动警告界面显示函数的标记被设定了。 在系统设定界面,选择AUTO.DISPLAYOFALARMMENU以开启或关闭自动显示函数。该函数默认为关闭。为了使此改变生效,电源必须关闭,再重启。->参见章节3.18。 F 当为警告强度等级设定的警告菜单标记的Auto.display被设定了。 $ER_SEV_NOAUTO[]设置是否为每个警告强度等级开启或关闭自动警告界面显示。有几种警告强度等级。NONE和W ARN警告不会影响出现执行和机器人的操作,也不会触发自动警告显示。默认设置为,自动警告显示对PAUSE和更严重的警告有效。在 FALSE:自动警告界面显示被关闭。
机器人的零点问题 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
一,为什么要Mastering(零点复归) 零点复归机器人时需要将机器人的机械信息与位置信息同 步,来定义机器人的物理位置。必须正确操作机器人来进行零 点复归。通常在机器人从FANUC Robotics出厂之前已经进行了 零点复归。但是,机器人还是有可能丢失掉原点数据,需要重 新进行零点复归 机器人通过闭环伺服系统来控制机器人各运动轴。控制器 输出控制命令来驱动每一个马达。而马达上装配的称为串行 脉冲编码器的反馈装置将把信号反馈给控制器。在机器人操 作过程中,控制器不断的分析反馈信号,修改命令信号,从 而在整个过程中一直保持正确的位置和速度。控制器必须“知 晓”每个轴的位置,以使机器人能够准确地按原定位置移动。 控制器通过比较操作过程中读取的串行脉冲编码器的信号与 机器人上已知的机械参考点信号的不同来达到这一目的 零点复归过程就是读取已知的机械参考点的串行脉冲编码器信 号的过程。这样的零点复归数据与其他用户数据一起保存在控制器备份中,并在未连接电源时由电池能源保持数据。当控制器在正常条件下关闭电源时,每个串行脉冲编码器的当前数据将保持在脉冲编码器中,由机器人上的后备电池提供能源(对P系列机器人来说,后备电池可能位于控制器上)。当控制器重新上电时,控制器将请求从脉冲编码器读取数据。当控制器收到脉冲编码器的读取数据
时,伺服系统才可以正确操作。这一过程可以称为校准过程(也就是说校准过程是机器人自身进行)。校准 在每次控制器开启时自动进行。如果控制器未连接电源时断开了脉冲编码器的后备电池,则上电时校准操作将失败,机器人唯一可能做的动作只有关节模式的手动操作。要还原正确的操作,必须对机器人进行重新零点复归与校准。 因为Mastering的数据出厂时就设置好了,所以,在正常情况下,没有必要做Masteing,但是只要发生以下情况之一,就必须执行Mastering。 机器人执行一个初始化启动; SRAM(CMOS)的备份电池的电压下降导致Mastering数据丢失;APC的备份电池的电压下降导致APC脉冲记数丢失; 在关机状态下卸下机器人底座电池盒盖子; 更换马达; 机器人的机械部分因为撞击导致脉冲记数不能指示轴的角度; 编码器电源线断开; 更换SPC; 机械拆卸 警告:如果校准操作失败,则该轴的软件移动限制将被忽略 ,并允许机器人超正常的移动。所以在未校准的条件下移动 机器人需要特别小心,否则将可能造成人身伤害或者设备损 坏。
常用故障代码和故障排除方法 伺服-001 操作面板紧急停止 SRVO-001 Operator panel E-stop [现象]按下了操作箱/操作面板的紧急停止按扭。 SYST-067 面板 HSSB 断线报警同时发生,或者配电盘上的 LED(绿色)熄灭时,主板( JRS11)-配电盘( JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。( 注释 ) [对策 1]解除操作箱/操作面板的紧急停止按扭。 [对策 2]确认面板开关板( CRM51 )和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。 [对策 3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。逐一更换开关单元或操作面板。 [对策 4]更换配电盘。 [对策 5]更换连接配电盘(JRS11)和主板( JRS11)的电缆。 在采取对策 6 之前,完成控制单元的所有程序和设定内容的备份。 [对策 6]更换配电盘。 (注释) SYST-067 面板 HSSB 断线报警同时发生,或 RDY LED熄灭时,有时会导致下面的报警等同时发生。(参阅示教操作盘的报警历史画面) 伺服 -001操作面板紧急停止 伺服 -004栅栏打开 サーボ -007外部紧急停止 伺服 -204外部( SVEMG 异常)紧急停止 伺服 -213保险丝熔断(面板 PCB) 伺服 -280SVOFF 输入 伺服-002 示教操作盘紧急停止 SRVO-002 Teach pendant E-stop [现象]按下了示教操作盘的紧急停止按扭。 [对策 1]解除示教操作盘的紧急停止按扭。 [对策 2]更换示教操作盘。 伺服-003 紧急时自动停机开关 SRVO-003 Deadman switch released [现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。 [对策 1]按下紧急时自动停机开关并使机器人操作。 [对策 2]更换示教操作盘。 伺服-021 SRDY 断开(组: i 轴: j ) SRVO-021 SRDY off (Group:i Axis:j) [现象]当 HRDY 断开时,虽然没有其他发生报警的原因, SRDY 处在断开状态。 (所谓HRDY ,就是主机相对于伺服发出接通还是断开伺服放大器的电磁接触器的信号。SRDY 是伺服相对于主机发出伺服放大器是否已经停止的信号。
ABB机器人零点校准方法_New
ABB机器人零点校准方法
FlexPendant 的操作方式 1、操作FlexPendant 时,通常左手持设备,右手在触摸屏上操作。具体手持方法如图12所示 图12 2、手持操作器主要部件如图13所示 图13 3、控制柜上的主要按钮和端口如图14所示 图14 4、控制柜上钥匙开关的位置于意义如图15所示 图15 注:手动全速模式不建议使用 校准机器人零点位置的具体方法 注:需要点击操作的地方都做了浅红色标记 第一步: 选择手动操纵(参看图1,首先把钥匙开关打到手动位置) 方法: 1> 点击ABB 2> 点击手动操纵
图 1 第二步:选择动作模式(参看图2 和图3) 方法: 1> 点击动作模式2> 点击轴1 - 3 或者轴4 - 6 3> 点击确定 第三步:选择工具坐标(参看图2 和图4) 方法: 1> 点击工具坐标2> 点击tGripper 3> 点击确定 图2图3 第四步:选择移动速度(参看图2 和图5) 方法: 1> 点击增量2> 点击中或者小3> 点击确定 图4图 5 第五步:手动移动机器人各轴到机械零点位置(参看图2) 方法: 此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系
注意: 如果先前选择轴1 - 3 则 1> 操纵杆上下移动为2轴动作 2> 操纵杆左右移动为1轴动作 3> 操纵杆顺/逆时针旋转为3轴动作 如果先前选择轴4 - 6 则 1> 操纵杆上下移动为5轴动作 2> 操纵杆左右移动为4轴动作 3> 操纵杆顺/逆时针旋转为6轴动作 1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色胶皮里面) 2> 右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各自机械绝对零点 图 6 A(六轴机器人) 图6B(四轴机器人) 移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。 机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。 第六步:更新转数计数器(参看图1,此时可以示教器使能开关) 方法: 1> 点击ABB 2> 点击校准3> 点击ROB_1 (参看图7) 图7图8
校准机器人零点位置的具体方法 第一步: 选择手动操纵(参看图1,首先把钥匙开关打到手动位置)方法:1>点击ABB 2>点击手动操纵 1 第二步: 选择动作模式(参看图2和图3) 方法:1>点击动作模式 2>点击轴1 — 3 或者轴4 3>点击确定 第三步: 选择工具坐标(参看图2和图4) 方法:1>点击工具坐标
2> 点击tGripper
3>点击确定 图3 第四步: 选择移动速度(参看图2和图5) 方法:1>点击增量 2>点击中或者小