课题内容工业机器人搬运工作站仿真授课时间
专业班级授课教材工业机器人编程与
操作
课时 1
授课类型
学生数
教学目标知识目标:1、理解工业机器人目标点示教方法
2、理解Offs指令的含义
能力目标:1、掌握Offs指令的使用方法
2、掌握工业机器人搬运工作站的示教方法。情感目标:1、培养学生良好的职业习惯。
2、培养学生的团队合作意识。
教学重点掌握Offs指令的使用方法教学难点掌握Offs指令的使用方法
教学方法
本着“教学过程与生产过程对接”、“以学生为主体,教师为主导”的基本原则,采用任务驱动法、情景教学法、启发式引导法、教师演示法进行教学。
学习方法
学生能够在做中学,把理论与实践相结合,通过小组合作的学习方式,来实现学生的有效学习。
教具准备PPT课件、电子教案、工作任务书、Robotstudio软件等
教学过程
环节
教学程序及设计教师活动学生活动设计意图
课前准备1、根据学生间的差异,指导学生分组(以2个同学
为一组),以便实现学生间的优势互补。
2、电子课件、电子教案、工作任务书。
指导学生
分组。
准备工服、
学具,进入
工作状态。
1、锻炼学生的团队
意识2、考虑学生
个体差异,以强带
弱。
任务一工业机器人搬运工作站仿真
观看视频一、观看视频
观看视
频,了解
本节课
任务情
况
创设工
厂化的
环境,提
出工作
观察
通过视频展示本
节课任务情况,
形象、具体、易
理解。
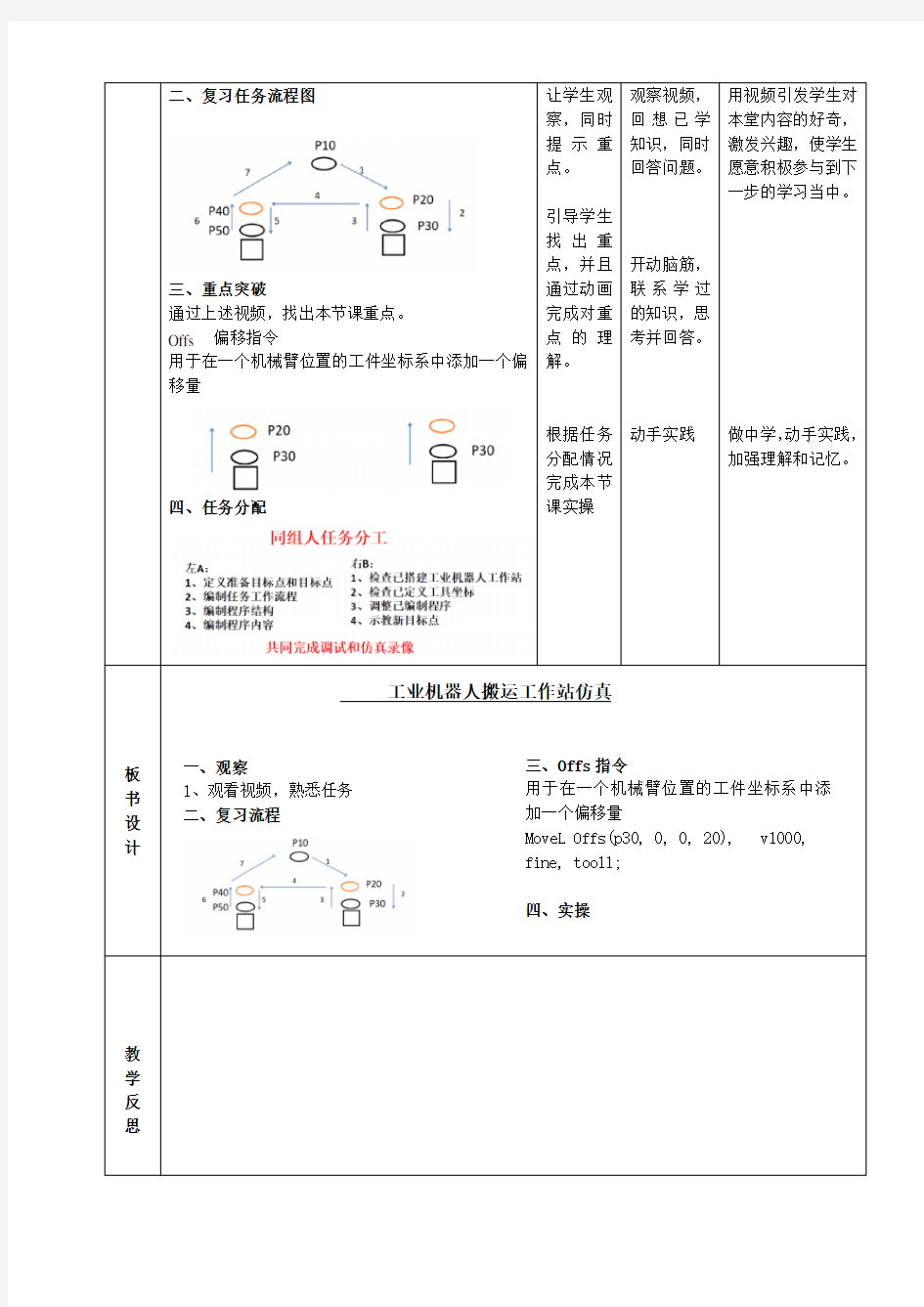
二、复习任务流程图
三、重点突破
通过上述视频,找出本节课重点。
Offs 偏移指令
用于在一个机械臂位置的工件坐标系中添加一个偏移量
四、任务分配让学生观
察,同时
提示重
点。
引导学生
找出重
点,并且
通过动画
完成对重
点的理
解。
根据任务
分配情况
完成本节
课实操
观察视频,
回想已学
知识,同时
回答问题。
开动脑筋,
联系学过
的知识,思
考并回答。
动手实践
用视频引发学生对
本堂内容的好奇,
激发兴趣,使学生
愿意积极参与到下
一步的学习当中。
做中学,动手实践,
加强理解和记忆。
板书设计
教学反思
工业机器人搬运工作站仿真
一、观察
1、观看视频,熟悉任务
二、复习流程
三、Offs指令
用于在一个机械臂位置的工件坐标系中添
加一个偏移量
MoveL Offs(p30, 0, 0, 20), v1000,
fine, tool1;
四、实操
工业机器人搬运工作站仿真工作任务书
班级:姓名:工位号:一、新授指令含义
二、搬运工作站工作流程编制
三、搬运工作站程序编制
四、小结
工业机器人工程应用虚拟仿真教程教学提纲 一、说明 1.课程的性质和内容 《工业机器人工程应用虚拟仿真教程》课程是高级技工学校工业机器人应用与维护专业的专业课。主要内容包括:Robot Studio软件的操作、建模、Smart 组建的使用、轨迹离线编程、动画效果的制作、模拟工作站的构建、仿真验证以及在线操作。 2.课程的任务和要求 本课程的主要任务是培养学生熟练操作Robot Studio软件,并能通过Robot Studio软件对工业机器人进行应用开发、调试、现场维护,为学生从事工业机器人工程技术人员打下的必要的专业基础。 通过本课程的学习,学生应该达到以下几个方面的专业基础。 (1)了解Robot Studio工业机器人仿真软件的基础知识,掌握软件使用方法和技巧。 (2)掌握构建基本仿真工业机器人工作站的方法。 (3)能熟练在Robot Studio软件中创建工件、工具模型。 (4)掌握工业机器人离线轨迹编程方法。 (5)掌握Smart组建的应用。 (6)掌握带导轨和变位机的机器人系统创建于应用方法。 (7)了解ScreenMaker示教器用户自定义界面的操作。 (8)掌握Robot Studio软件的在线功能。 3.教学中注意的问题 (1)本课程教学最好采用理论与实际相结合的一体化教学方式,借助多媒体网络教室,一人一机,使用多媒体课件讲解与软件操作相结合。 (2)理论教学中应帮助学生总结并灵活运用所学的相关知识,本着够用的原则讲授,切忌面面俱到。对工业机器人仿真操作不作深入探讨,仅作一般性了解。
(3)实践教学环节中对工业机器人Robot Studio仿真软件常用功能作简单介绍,重点培养学生使用软件对工业机器人进行基本操作、功能设置、二次开发、在线监控与编程、方案设计和检验。教师教学中多联系生产实际并选用一些工业上经典的工业机器人使用案例进行讲解,提高学生对工业机器人进行应用开发、调试、现场维护的能力。 二、学时分配表
1.1工业机器人仿真运行及录像 可以在计算机中仿真验证机器人运行轨迹及录制视频。 1.仿真运行步骤 (1)如图10-18所示,在“基本”功能选项中单击“同步”,选择“同步 到工作站” S I U J'..u ./ I .- -ilj P J Z1 帳胡| Hr EA w? 刖如A Q # 叨SWG Q ^9- m三打厶 .ftUS - E”- 協:沁令 jj - 划耳艺- 二. ! fcurR _________________ 型與. ________________ 色 希*:證住忙曰力啜知立& f J2L -i AalL ■isiialTsiidkAih^Al S* 吉H-kTiE?3.Ti!>3 H IE1HKKU■二—辰―?. /耐皿Mt 祜出h可 A KEII J 3 ■' ^FdiiAwfr 』FlG3F?Ti&jt 論ijr■吨—lifiiJt y?■吉■" ti-Hu 巾 Sfliw ■?喰,3,cmMto,,mt,y jo D.町 图10-18 (2) 如图10-19所示,将需要同步的选项都打勾后(默认全部勾选) ,单击“确定” J il giTVli ?Q|1JO1- 凶杯i *吕耳 图10-19 (3) 如图10-20所示,在“仿真”功能选项中单击“仿真设定”。选项都
打勾,在T_R0B1的设置“进入点”选择要执行的程序,单击“关闭” 图 10-20 (4)如图10-21所示,在“仿真”功能选项中,单击“播放”后机器人会 按所编辑的程序路径进行运动 2.录制视频步骤 (1)如图10-22所示,在“文件”功能选项中,选择“选项”,单击“屏 幕录像 机”,查看录制的视频保存位置,单击“确定” 9lf ■ 14 to t) ■ El 9 i* *4; n y M L ^LEK-L 1春二 Gi 1 啡*t ■M4 ■Eg MMtt TJTEJ EI 啊12云 .SfeZMm 畫期Fi ■塌. QbflBq>¥i i -f^apHiiVM ■ apl "- P. -x 暮| no 竝 图 10-21
课题内容工业机器人搬运工作站仿真授课时间 专业班级授课教材工业机器人编程与 操作 课时 1 授课类型 学生数 教学目标知识目标:1、理解工业机器人目标点示教方法 2、理解Offs指令的含义 能力目标:1、掌握Offs指令的使用方法 2、掌握工业机器人搬运工作站的示教方法。情感目标:1、培养学生良好的职业习惯。 2、培养学生的团队合作意识。 教学重点掌握Offs指令的使用方法教学难点掌握Offs指令的使用方法 教学方法 本着“教学过程与生产过程对接”、“以学生为主体,教师为主导”的基本原则,采用任务驱动法、情景教学法、启发式引导法、教师演示法进行教学。 学习方法 学生能够在做中学,把理论与实践相结合,通过小组合作的学习方式,来实现学生的有效学习。 教具准备PPT课件、电子教案、工作任务书、Robotstudio软件等 教学过程 环节 教学程序及设计教师活动学生活动设计意图 课前准备1、根据学生间的差异,指导学生分组(以2个同学 为一组),以便实现学生间的优势互补。 2、电子课件、电子教案、工作任务书。 指导学生 分组。 准备工服、 学具,进入 工作状态。 1、锻炼学生的团队 意识2、考虑学生 个体差异,以强带 弱。 任务一工业机器人搬运工作站仿真 观看视频一、观看视频 观看视 频,了解 本节课 任务情 况 创设工 厂化的 环境,提 出工作 观察 通过视频展示本 节课任务情况, 形象、具体、易 理解。
二、复习任务流程图 三、重点突破 通过上述视频,找出本节课重点。 Offs 偏移指令 用于在一个机械臂位置的工件坐标系中添加一个偏移量 四、任务分配让学生观 察,同时 提示重 点。 引导学生 找出重 点,并且 通过动画 完成对重 点的理 解。 根据任务 分配情况 完成本节 课实操 观察视频, 回想已学 知识,同时 回答问题。 开动脑筋, 联系学过 的知识,思 考并回答。 动手实践 用视频引发学生对 本堂内容的好奇, 激发兴趣,使学生 愿意积极参与到下 一步的学习当中。 做中学,动手实践, 加强理解和记忆。 板书设计 教学反思 工业机器人搬运工作站仿真 一、观察 1、观看视频,熟悉任务 二、复习流程 三、Offs指令 用于在一个机械臂位置的工件坐标系中添 加一个偏移量 MoveL Offs(p30, 0, 0, 20), v1000, fine, tool1; 四、实操
1.1工业机器人仿真技术应用 工业自动化的市场竞争压力日益加剧,客户在生产中要求更高的效率,以降低价格,提高质量。如今让机器人编程在新产品生产之始花费时间检测或试运行是行不通的,因为这意味着要停止现有生产以对新的或修改的部件进行编程。不首先验证到达距离及工作区域,而冒险制造刀具和固定装置已不再是首选方法。现代生产厂家在设计阶段就会对新部件的可制造性进行检查。在为机器人编程时,离线编程可与建立机器人应用系统同时进行。 在产品制造的同时对机器人系统进行编程,可提早开始产品生产,缩短上市时间。离线编程在实际机器人安装前通过可视化及可确认的解决方案和布局来降低风险,并通过创建更精准的路径来获得更高的部件质量。为实现真正的离线编程,RobotStudio采用了ABB VirtualRobot TM技术。ABB在十多年前就已经发明了VirtualRobot TM技术。RobotStudio是市场上离线编程的领先产品。通过新的编程方法,ABB正在世界范围内建立机器人编程标准。 在RobotStudio中可以实现以下的主要功能: ●CAD导入。RobotStudio可轻易地以各种主要的CAD格式导入数据,包括IGES、STEP、VRML、VDAFS、ACIS和CATIA。通过使用此类非常精确的3D模型数据,机器人程序设计员可以生成更为精准的机器人程序,从而提高产品质量。 ●自动路径生成。这是RobotStudio最节省时间的功能之一。通过使用待加工部件的CAD模型,可在短短几分钟内自动生成跟踪曲线所需的机器人位置。如果人工执行此项任务,则可能需要数小时或数天。 ●自动分析伸展能力。此便捷功能可让操作者灵活移动机器人或工件,直至所有位置均可到达。可在短短几分钟内验证和优化工作单元布局。 ●碰撞检测。在RobotStudio中,可以对机器人在运动过程中是否可能与周边设备发生碰撞进行一个验证与确认,以确保机器人离线编程得出的程序的可用性。 ●在线作业。使用RobotStudio与真实的机器人进行连接通信,对机器人进行便捷的监控、程序修改、参数设定、文件传送及备份恢复的操作,使调试与维护工作更轻松。
附录 MATLAB 机器人工具箱仿真程序: 1)运动学仿真模型程序(Rob1.m) L1=link([pi/2 150 0 0]) L2=link([0 570 0 0]) L3=link([pi/2 130 0 0]) L4=link([-pi/2 0 0 640]) L5=link([pi/2 0 0 0]) L6=link([0 0 0 95]) r=robot({L1 L2 L3 L4 L5 L6}) https://www.doczj.com/doc/6f9685173.html,=’MOTOMAN-UP6’ % 模型的名称 >>drivebot(r) 2)正运动学仿真程序(Rob2.m) L1=link([pi/2 150 0 0]) L2=link([0 570 0 0]) L3=link([pi/2 130 0 0]) L4=link([-pi/2 0 0 640]) L5=link([pi/2 0 0 0]) L6=link([0 0 0 95]) r=robot({L1 L2 L3 L4 L5 L6}) https://www.doczj.com/doc/6f9685173.html,= ’MOTOMAN-UP6’ t=[0:0.01:10];%产生时间向量 qA=[0 0 0 0 0 0 ]; %机械手初始关节角度 qAB=[-pi/2 -pi/3 0 pi/6 pi/3 pi/2 ];%机械手终止关节角度 figure('Name','up6机器人正运动学仿真演示');%给仿真图像命名q=jtraj(qA,qAB,t);%生成关节运动轨迹 T=fkine(r,q);%正向运动学仿真函数 plot(r,q);%生成机器人的运动
figure('Name','up6机器人末端位移图') subplot(3,1,1); plot(t, squeeze(T(1,4,:))); xlabel('Time (s)'); ylabel('X (m)'); subplot(3,1,2); plot(t, squeeze(T(2,4,:))); xlabel('Time (s)'); ylabel('Y (m)'); subplot(3,1,3); plot(t, squeeze(T(3,4,:))); xlabel('Time (s)'); ylabel('Z (m)'); x=squeeze(T(1,4,:)); y=squeeze(T(2,4,:)); z=squeeze(T(3,4,:)); figure('Name','up6机器人末端轨迹图'); plot3(x,y,z); 3)机器人各关节转动角度仿真程序:(Rob3.m) L1=link([pi/2 150 0 0 ]) L2=link([0 570 0 0]) L3=link([pi/2 130 0 0]) L4=link([-pi/2 0 0 640]) L5=link([pi/2 0 0 0 ]) L6=link([0 0 0 95]) r=robot({L1 L2 L3 L4 L5 L6}) https://www.doczj.com/doc/6f9685173.html,='motoman-up6' t=[0:0.01:10]; qA=[0 0 0 0 0 0 ]; qAB=[ pi/6 pi/6 pi/6 pi/6 pi/6 pi/6]; q=jtraj(qA,qAB,t); Plot(r,q); subplot(6,1,1); plot(t,q(:,1)); title('转动关节1'); xlabel('时间/s'); ylabel('角度/rad'); subplot(6,1,2); plot(t,q(:,2)); title('转动关节2'); xlabel('时间/s'); ylabel('角度/rad'); subplot(6,1,3); plot(t,q(:,3)); title('转动关节3'); xlabel('时间/s'); ylabel('角度/rad'); subplot(6,1,4); plot(t,q(:,4)); title('转动关节4'); xlabel('时间/s'); ylabel('角度/rad' ); subplot(6,1,5); plot(t,q(:,5)); title('转动关节5'); xlabel('时间/s'); ylabel('角度/rad'); subplot(6,1,6); plot(t,q(:,6)); title('转动关节6'); xlabel('时间/s'); ylabel('角度/rad'); 4)机器人各关节转动角速度仿真程序:(Rob4.m) t=[0:0.01:10]; qA=[0 0 0 0 0 0 ];%机械手初始关节量 qAB=[ 1.5709 -0.8902 -0.0481 -0.5178 1.0645 -1.0201]; [q,qd,qdd]=jtraj(qA,qAB,t); Plot(r,q); subplot(6,1,1); plot(t,qd(:,1)); title('转动关节1'); xlabel('时间/s'); ylabel('rad/s');
广州城建职业学院 综合实训报告 课程名称:《工业机器人编程、仿真及调试》实训项目:手动操纵ABB工业机器人 学生姓名:罗吉祥 学生学号: 1509010430 所在班级: 15机电4班 指导教师:张志杰 机电工程学院 2017-2018学年第1学期
实训项目 手动操纵工业机器人 一、学习准备 1.主要设备:工业机器人 2.学习资料:安全操作规程、工作页、多媒体设备、焊接手册; 3.劳动保护用品:工作服、电焊手套、面罩、绝缘鞋、滤光玻璃 二、学习过程 引导问题: 1.请同学们查阅资料并写出手动模式下可以进行微动控制,无论“示教器”上显示什么 视图都可以进行微动控制,但在程序执行过程中无法进行微动控制。 答:微动控制就是使用 FlexPendant 控制杆手动定位或移动机器人或外轴。 什么时 候可以微动控制? 手动模式下可以进行微动控制。无论 FlexPendant 上显示什么视图都可 以进行微动控 制,但在程序执行过程中无法进行微动控制。 关于动作模式和机器人 选定 的动作模式和 / 或坐标系确定了机器人移动的方式。 在线性动作模式下,工具中心点沿空 间内的直线移动,即 " 从 A 点到 B 点移动 " 方 式。工具中心点按选定的坐标系轴的方 向移动。 在逐轴模式下,一次只能移动一根机器人轴。因此很难预测工具中心点将如何移 动。 关于动作模式和附加轴 附加轴只能进行逐轴微动控制。附加轴可设计为进行某种线性 动作或旋转 (角)动 作的轴。线性动作用于传送带,旋转动作用于各种工件操纵器。 附 加轴不受选定的坐标系影响。 关于坐标系 如果工具坐标系的其中一个坐标与钻孔平行,则 能轻而易举地使用机械爪将销子定 位于钻孔内。在基坐标系中执行同样的任务时,可能需 要同时在 x 、和 z 坐标进行微 动控制,从而增加了精确控制的难度。 选择合适的坐标系 会使微动控制容易一些,但对于选择哪一种坐标系并没有简单或 唯一的答案 学习目标: 1、掌握各轴的运动规律; 2、熟练使用机器人的三种运动方式; 3、能够使用示教器摇杆熟练控制机器人各轴运动; 4、能够使用增量控制机器人的步进运动; 5、培养学生认真细致的工作态度; 建议学时: 学习地点:一体化学习工作站
《工业机器人工程应用虚拟仿真》课程标准制定人:高亮制定时间:2016年10月 批准人:批准时间: 适用专业:工业机器人技术专业课程类型: 建议学时:102 学分:8 本课程旨在提高学生在机器人方面的综合素质,着重使学生掌握从事机器人加工类企业中机器人工作所必备的知识和基本技能,初步形成处理实际问题的能力。培养其分析问题和解决问题的学习能力,具备继续学习专业技术的能力;在本课程的学习中渗透思想道德和职业素养等方面的教育,使学生形成认真负责的工作态度和严谨的工作作风,为后续课程学习和职业生涯的发展奠定基础。 一、课程分析 (一)教学计划的制定和教学内容的选取 根据培养应用技能型人才总目标,制订本专业教学计划,课程的教材配套,教学、实验、实训、课程设计大纲和指导书等教学文件齐全,近几年来引入了现代教学技术手段,已初步建设、形成了具有特色的全套课堂教学和实验教学课件。 根据该课程的基本教学要求和特点,结合学时的安排,从教材的整体内容出发,有侧重地进行取舍,筛选出学生必须掌握的基本教学内容,较好地解决了教学中质量与数量的矛盾。 通过本课程的学习,使学生了解工业机器人工程应用虚拟仿真的基础知识、机器人虚拟仿真的基本工作原理;掌握机器人工作站构建、RobotStudio中的建模功能、机器人离线轨迹编程、Smart组件的应用、带轨道或变位机的机器人系统创建于应用,以及RobotStudio的在线功能,具备使用RobotStudio仿真软件的能力和针对不同的机器人应用设计机器人方案的能力,为进一步学习其它机器人课程打下良好基础。
(二)教学方法分析 1、本课程适宜采用理论、实践一体化的教学方法。坚持理论联系实际,突出实际上机训练,切实保证技能训练教学的时间和质量。 2、注意教学方法的灵活性,可组织学生讨论、问题教学、阅读指导等。借用多媒体的声像演示,对实例进行展示,提供给学生直观的理论印象。通过实例操作,提高学生对焊接相关知识的理解。 3、充分发挥学生的学习主观能动性。在本课程的教学过程中,注意训练学生的操作动手能力,引导学生理论联系实际,应用课本中的理论知识来解决实际操作问题。 4、重视实习教学的过程评价,实现在评价中学习的理念。 5、教学中要注重培养学生的质量观念和安全意识。 二.课程目标 (一)知识教学目标 1、了解机器人仿真软件,了解机器人仿真软件的应用。 2、掌握构建基本仿真工业机器人工作站的方法。 3、掌握码垛机器人工作站、焊接机器人工作站、打磨抛光机器人工作站的设计理念和设计方法。 4、掌握ABB机器人仿真软件RobotStudio中的建模功能,能运用所学制图软件在RobotStudio中进行建模。 5、掌握ABB工业机器人离线轨迹编程方法。 6、了解ABB机器人仿真软件RobotStudio中的其它功能。 (二)能力培养目标 1、掌握基本仿真工业机器人工作站的构建方法。
基于DELMIA/IGRIP的工业机器人仿真 0引言机器人仿真技术是计算机技术、机器人学和计算机图形学相结 合的产物。借助于机器人的实体图形对机器人的运动进行仿真,可形象逼真地反映机器人工作运动的全过程,可以实现机器人机构和控制器的优化设计,规划出最优的运动轨迹。机器人的动态图形仿真对机器人的设计、制造、试验及其应用具有重要的指导意义。机器人仿真系统作为机器人设计和研究过程中安全可靠、灵活方便的工具,发挥着越来越重要的作用。目前,离线仿真在国内虽然有些初步研究,但实际应用很少。可以预见随着机器人在我国的大量应用,离线仿真技术的研究和应用不但迫在眉睫,同时它的成功研究和应用也将有广阔的市场前景。1DELMIA及其IGRIP DELMIA集成解决方案在全球领先 的企业与科研机构中得到广泛的应用。在航空航天、汽车、造船、重型设备、日用消费品等各个行业发挥着重要的作用。DELMIA公司系列软件以基于物理的虚拟设计与制造及虚拟机器人等模块表现最为优异。DELMIA软件在机器人应用仿真方面处于世界领先地位。DELMlA软件能显著降低人机时和工程准备时间,提高仿真的精度。DELMIA/IGRIP是专业机器人模拟软件,利用IGRIP可快速和图形化地构造各种应用工作单元作业,同时DELMIA/IG—RIP能很容易导人CAD数据,自动碰撞侦测功能能避免破坏减小风险。不管是对单个机器人作业单元还是整个工厂生产线,IGRIP都能提供相应的解决方案以提高制造质量、精度和效益。2机器人仿真在机器人仿真研究中,仿真系 统由以下几部分构成:三维几何模型,运动计算,轨迹规划,运动图形仿真等。根据KUKA240—2型机器人结构特点,机器人仿真步骤如下。2.1机器人任 务的设定工业机器人一般有6个自由度,要实现机器人运动学的逆解是一项十分繁重的工作。DELMIA/IGRIP软件能成功解决这困难。通过